三點差分GPS定向方位引入方法研究
2018-05-05 08:18:21周玉堂
宇航計測技術 2018年2期
周玉堂
(北京航天計量測試技術研究所,北京 100076)
1 引 言
隨著科學技術的發展,慣性導航、制導和控制的精度越來越高,需要建立高精度的定向基準進行校準,以提高系統的準確性和可靠性。在動基座工況下,為對船或艇上的慣性系統進行方位校準,需要引入外部的方位基準。可采用差分GPS定向確定初始大地方位角作為基準,再通過傳遞環節傳遞到慣性系統進行校準工作[1]。
全球定位系統Global Positioning System(簡稱 GPS),作為新一代衛星導航定位系統經過多年的發展,已在航空、航天、軍事、交通運輸、資源勘探、通信氣象等領域被廣泛采用。利用GPS測量具有以下優點:
(1)定位定向精度高;
(2)測量不受天文和時間的限制。
我國使用GPS最初主要用于高精度大地測量和控制測量,如用于各種類型的工程測量、變形觀測、航空攝影測量、海洋測量和地理信息系統中地理數據的采集等[2]。
本文結合實際應用,提出了一種三點差分GPS定向方位引入方法,解決了實際應用問題[3,4]。
2 三點差分GPS定向方位引入方法方案原理
三點差分GPS定向方位引入方法方案原理如圖1。

圖1 三點差分GPS定向方位引入方法方案原理Fig.1 Method plan for azimuth transmitting based on Three-point Diff-GPS direction
三點差分GPS定向方位引入方法中三點是指岸上一點為GPS固定站;船上兩點分別為GPS運動站和運動參考站,其中運動站是在船上固定經緯儀,在經緯儀上安裝GPS天線;運動參考站是在船上固定燈標,在燈標上安裝GPS天線,兩站之間的距離根據船上空間和尺寸選定。
2.1 三點差分GPS定向方位引入方法方案原理
三點差分GPS定向是指距離較近的兩點運動站和運動參考站(不大于200m)分別與較遠的固定站(不大于30km)通過無線傳輸,差分解算得到兩點高精度的經度、緯度和高程,利用定向計算模型計算出運動站相對運動參考站的大地方位角。
當運動站的經緯儀與運動參考站的燈標準直時,計算的運動站相對運動參考站的大地方位角就代表了經緯儀相對燈標的指向,利用同步信號同步采集運動站相對運動參考站的大地方位角和經緯儀的方位數據,就實現了方位引入。
GPS定位誤差主要包括:
(1)GPS衛星軌道誤差、衛星鐘差;
(2)電離層效應、對流層效應和多路徑效應影響;
(3)GPS接收機的噪聲誤差、時間延遲等。
三點差分GPS定向主要利用運動站和固定站兩點GPS定位的空間相關性,通過差分技術來抵消掉公共誤差部分(如GPS衛星軌道誤差、衛星鐘差、電離層效應以及對流層效應的影響等)來提高GPS的定位精度;利用運動站和運動參考站的相關性進行二次差分抵消掉公共誤差(如GPS接收機的噪聲誤差、時間延遲等)從而提高定向精度。
采用特殊的GPS 接收天線(大地測量天線,為圓盤型)和接收機可以很好的抑制多路徑效應,降低噪聲誤差,減少時間延遲,使GPS的定位精度有所提高。
為了適應應用的靈活性,可采用移動基站技術,即把固定站設置成移動基站,可隨運動站一起移動,滿足大范圍移動測量需求。
2.2 三點差分GPS定向方位引入方法設備
岸上GPS固定站采用美國天寶公司生產的GPS5700接收機和大地測量天線,船上GPS運動站、運動參考站采用DSM232接收機和大地測量天線。
GPS固定站設置示意圖見圖2。
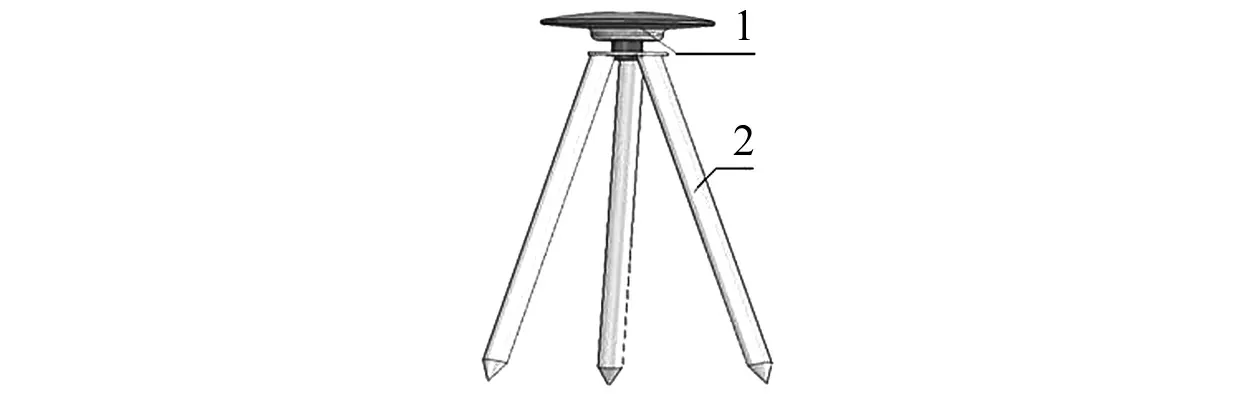
1-GPS固定站天線; 2-三腳架。圖2 GPS固定站設備示意圖Fig.2 Sketch map of device on base station
在岸上設三腳架,三腳架上裝GPS固定站天線。GPS固定站位置可任意架設,只要能保證與船上兩GPS運動站無線電正常通訊即可。
運動站設備示意圖見圖3。
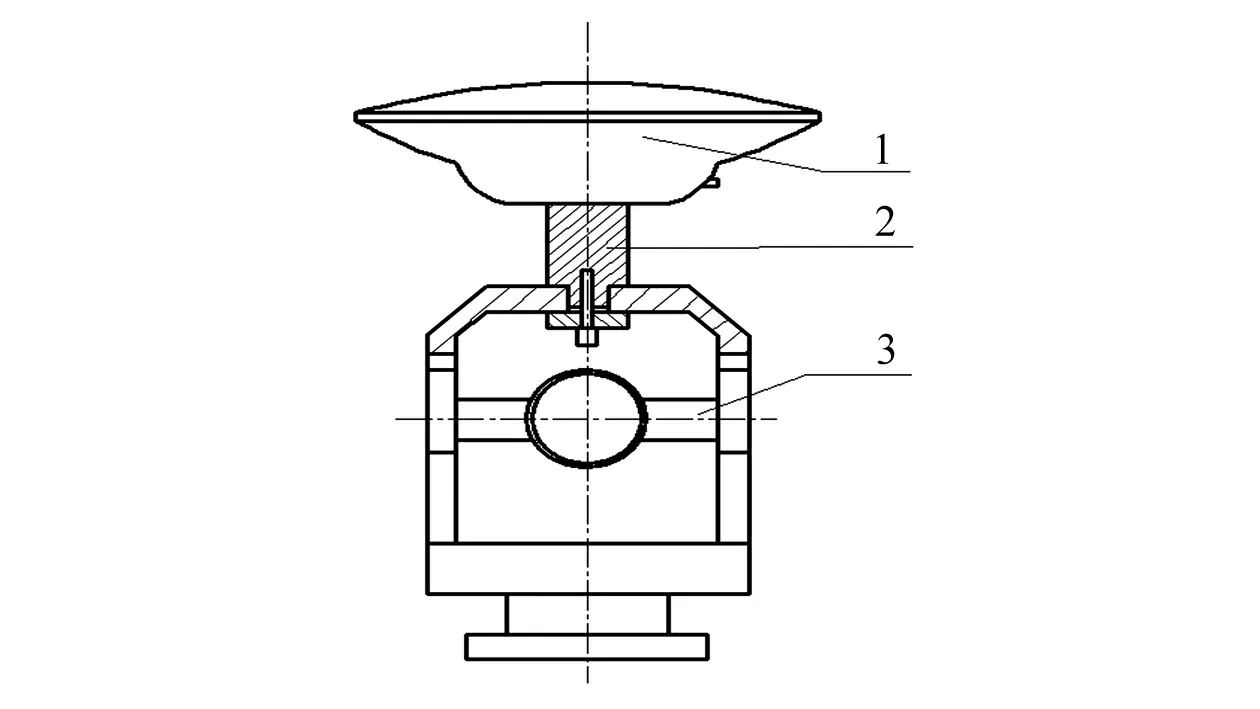
1-GPS運動站天線; 2-天線連接桿;3-經緯儀。圖3 運動站設備示意圖Fig.3 Sketch map of device on moving station
在船上裝經緯儀,經緯儀上通過天線連接桿裝GPS運動站天線。調節GPS運動站天線中心和經緯儀豎軸回轉中心重合。
運動參考站設置示意圖見圖4。
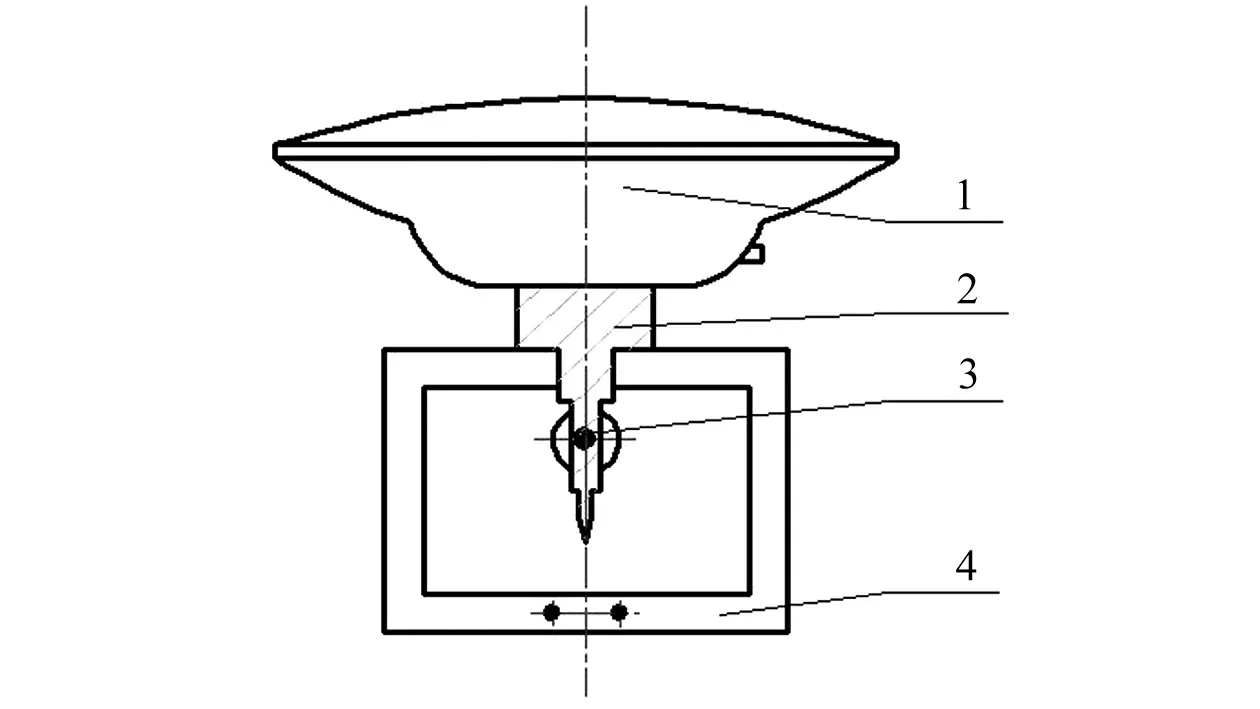
1-GPS運動參考站天線;2-燈標連接桿;3-燈標;4-底座。圖4 運動參考站設備示意圖Fig.4 Sketch map of device on moving reference station
在船上基座裝底座,在底座上裝燈標連接桿和燈標,燈標連接桿上裝GPS運動參考站天線。調節GPS運動參考站天線中心和燈標中心方位方向重合。
2.3 差分GPS定向模型及動態數據采集處理方法
2.3.1 差分GPS定向模型
對于WGS84橢球,計算公式及模型如下:
圓周率:π=3.141 592 653 589 79;
橢球的長半軸:a=6 378 137m;
橢球的扁率:f=1/298.257 223 563;
橢球的短半軸:b=(1-f)a;
運動站緯度:b1,rad;
運動站經度:l1,rad;
運動站高程:h1,m;
運動參考站緯度:b2,rad;
運動參考站經度:l2,rad;
運動參考站高程:h2,m;
運動站到運動參考站的距離:s,m;
運動站相對運動參考站的大地方位角:A,(°);
運動站的橢球的卯酉圈半徑

運動站在直角坐標系的協議地球坐標
運動參考站的橢球的卯酉圈半徑

運動參考站在直角坐標系的協議地球坐標
運動站到運動參考站的距離
把協議地球坐標系轉換到站心坐標系(法線測量坐標系)時,繞Y軸旋轉向量
繞X軸旋轉向量
繞Z軸旋轉向量
旋轉向量
C=Ry(-π/2)·Rx(b2)·Rz(l2-π/2)
(9)
運動參考站坐標轉換到運動站站心坐標系中的坐標

式中:Δm——測量誤差,常規Δm=0,則
運動站相對運動參考站的大地方位角
A=180/π×atan(Δz12/Δx12)
(12)
考慮到atan取值范圍及編程,運動站相對運動參考站的大地方位角的確定如下
2.3.2 動態數據采集處理方法
由于GPS接收機數據最高輸出頻率為10Hz,為提高動態數據采集精度,動態采集同步信號到達時距前一點的時間,進行數據線性內插。
線性內插法公式
式中:AN——內插后的大地方位角;A1——按同步脈沖到達前一組經度、緯度和高程數據計算出的大地方位角;A2——按同步脈沖到達后一組經度、緯度和高程數據計算出的大地方位角;t——同步脈沖到達時,距前一點的時間;T——GPS接收機輸出數據的時間間隔,T=100ms。
3 三點差分GPS定向方位引入方法誤差分析
根據差分GPS定位誤差和定向計算公式,可以算出三點差分GPS定向靜態定向誤差,而三點差分GPS定向方位引入時,還要考慮經緯儀和燈標對方位角的影響。當動態使用時,可根據其動態性能及動態采樣方法,分析出其動態測量誤差。
3.1 靜態誤差分析
3.1.1 三點差分GPS定向的靜態誤差
三點差分GPS定向的靜態誤差是運動站和運動參考站的差異性對定向誤差的影響。天線相位中心位置誤差指標:2.0mm,轉換為經緯度誤差為
由數學模型得到各分量對定向誤差的影響,公式如下
任意設定相距約70m的兩點的經緯度和高程,由誤差模型和經緯度誤差數據,可得到運動站相對運動參考站大地方位角的靜態誤差
ΔA12j=6.50″
(17)
3.1.2 方位引入引起的測量誤差
3.1.2.1 天線相位中心與與經緯儀回轉中心不同心引起的定向誤差
GPS天線相位中心與經緯儀回轉中心不同心誤差 0.2mm,按運動站距運動參考站70m計算,帶來的定向誤差
3.1.2.2 GPS天線相位中心與燈標不同心誤差引起的定向誤差
GPS天線相位中心與燈標不同心誤差 0.2mm,按運動站距運動參考站70m計算,帶來的定向誤差
ΔAc2=ΔAc1=0.58″
(19)
3.1.2.3 經緯儀測角誤差
由JD2經緯儀測角指標:2.0″,經緯儀的測角誤差
ΔAc3=2.7×2.0=5.4″
(20)
經緯儀及燈標引起的靜態測量誤差
三點差分GPS定向方位引入方法的靜態誤差
3.2 動態數據處理誤差分析
由于GPS接收機數據最高輸出頻率為10Hz,采用采用線性內插后,時間按誤差Td=0.01s計算,在船航向按幅值YA=1.0°,周期YT=15.0s變化時,時間延遲對三點差分GPS定向的影響為
三點差分GPS定向方位引入方法的動態誤差
4 試驗驗證
三點式差分GPS靜態定向精度試驗在天津第一測繪大隊GPS綜合檢定場進行,其靜態試驗方法原理見圖5。
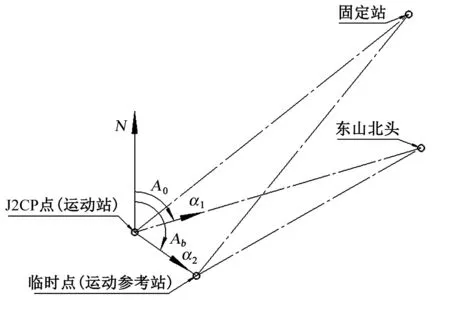
圖5 三點差分GPS定向靜態試驗方法Fig.5 Static experiment method for azimuth transmitting based on Three-point Diff-GPS direction
使用第一測繪大隊兩個一等天文點:J2CP和東山北頭點作為基準。
J2CP→東山北頭點的大地方位角A0由一大隊提供,并出具測量報告。
距J2CP近似70m處架設參考點,參考點相當于運動參考站,J2CP點相當于運動站。
先需測出J2CP→參考點的標準大地方位角Ab。方法是在J2CP點架設TM5100A電子經緯儀,東山北頭點和臨時點上架設上架設標桿儀,經緯儀望遠鏡視準軸對準東山北頭點時方位度盤讀數值為α1,對準臨時點標桿時,方位度盤讀數值為α2,J2CP點→參考點的標準大地方位角Ab為
Ab=A0+(α2-α1)
(25)
測出標準大地方位角后,再用三點差分GPS定向測量。在J2CP點和參考點上裝上GPS運動站天線,然后在遠方15km~20km處架設GPS固定站,架設位置需保證GPS固定站接收衛星信號正常,固定站配套發射電臺和兩運動站接收電臺之間無線信號的暢通傳輸,固定站架設GPS固定站接收機。
用三點差分GPS定向法,測出J2CP→參考點的大地方位角,與標準大地角Ab相比,得到三點式差分GPS定向的靜態誤差。
當在某一位置上測完10次后,把參考點重新架設,遠方的固定站更換位置,再重新導引標準大地角,并測出三點差分GPS定向的方位角。固定站共選用八個位置,距J2CP點距離為14 237.01m至20 506m,參考點與J2CP點距離為68.78m至68.81m,以80次定向測量的數據,算出三點差分GPS定向的靜態誤差相關數據:
標準偏差:σ=6.29″,
靜態誤差:

(26)
由此可以看出試驗結果與誤差分析結果相符,從而驗證了誤差分析的正確性和準確性。
5 結束語
三點差分GPS定向方位引入方法適用于靜態、動態方位引入和傳遞,能對導航系統和武器瞄準系統進行校準或比對,已成功應用于船上的測量校準試驗。對于推廣應用還需開展進一步論證和研究,尤其是動態誤差的分析和試驗驗證還需開展大量的研究工作。
[1] 孫方金,王姜婷,張玉龍等.定向原理與方位角的傳遞[M].北京:中國宇航出版社,2014.
[2] 王俊勤,沈慧群.航天靶場大地工程測量[M].北京:解放軍出版社,2007.
[3] 總參謀部測繪導航局.大地與工程測量[M].北京: 解放軍出版社,2012.
[4] 中國人民解放軍總裝備部軍事訓練教材編輯工作委員會. 靶場大地測量[M].北京:國防工業出版社,2001.