全墊升氣墊船登灘運動特性分析
2018-05-03 09:01:03沈劍毅湯宇嘉
船舶 2018年1期
沈劍毅 高 嵩 湯宇嘉
(1. 中國船舶及海洋工程設計研究院 上海200011;2.上海海迅機電工程有限公司 上海200011)
引 言
全墊升氣墊船是一種貼近水面滑行的水上高速運載工具,具有許多優良特性,如:航速快、水下物理場小、兩棲性好、適應性強等,在軍事、救援、破冰、掃雷等領域具有明顯優勢,尤其適于用于兩棲輸送工具使用[1-2],因而得到世界各國的高度重視。全墊升氣墊船的工作原理是利用大功率風扇向船體底部快速壓入大量空氣,使船體底部與水面之間形成動力氣墊,使船體全部脫離水面,同時使用柔性圍裙圍在船底封閉氣墊以增加船體飛高、沖灘和越障的能力。
氣墊船在沖灘過程中先后經歷近岸航行階段、登灘階段以及岸灘航行階段,在不同階段其運動特性存在較大差別,尤其在登灘過程中,氣墊船部分位于水介質上,部分位于陸地介質之上,船的運動狀態復雜且變化劇烈,雖然時間較短,但對氣墊船登灘運動特性有很大影響。
本文以某型全墊升氣墊船登灘實測數據為研究對象,對該型船登灘過程中的運動航速、姿態、加速度和壓力等運動參數的變化特性進行深入分析,獲得全墊升氣墊船登灘過程的運動特性,不僅可用來指導氣墊船駕駛員的登灘操作,而且對于完善氣墊船的理論體系和改進氣墊船的性能具有一定的指導意義。
1 登灘運動測試參數及測試方法
氣墊船的運動特性不僅與氣動力、水動力和導管槳推力直接相關,還與風機-氣道-圍裙構成的墊升系統密切相關[3],目前國內對氣墊船運動特性,尤其針對登灘這種跨越水陸界面的復雜運動,缺乏準確的理論預報手段,因而有必要通過實船運動參數測試,積累重要的實船運動原始數據,從而分析氣墊船在登灘時運動參數的變化規律與內在聯系,以便掌握其運動規律和操縱特性。
全墊升氣墊船登灘運動測試的主要參數包括航跡、航速、航向角、縱搖、橫搖、加速度等運動參數,側風門狀態、槳距角、舵角等操縱面參數,以及風向、風速、浪高、氣溫和氣壓等環境參數。此外,考慮氣墊壓力和氣囊壓力對氣墊船運動特性具有的重要影響,還對氣囊和氣墊內的壓力進行測試。上述各參數的測試和采集主要通過多種傳感器來實現,并已考慮被測參數的特性及精度要求。
1.1 數據測量設備選型
在本次運動測試中,氣墊船的位置、速度、航向等信息由GPS獲取。由于測試在海上進行,距離陸地基站距離較遠,因而GPS需要本地基站才能輸出航向角, 故采用雙天線陣列。測試裝置選擇麥哲倫802高精度GPS,它是一種新型的集高精度定位、定向為一體的雙頻GPS設備,能夠滿足現代導航系統需要,在高磁性的環境下也能提供快速和準確的測量數據,是理想的航跡測量設備。GPS通過RS232接入中心控制網關BS909N,采集分析軟件依據坐標和航向角,實時計算航行軌跡。
縱橫搖測試通過機械式垂直陀螺實現,與電子陀螺相比,其角度更趨于穩定,抗干擾性能強,而且具有頻響高等優點,垂直陀螺經過解調后的電壓信號接到無線電壓節點,通過中心網關聯接入測試系統。加速度測量采用無線加速度計實現,由無線加速度傳感器節點完成數據傳輸。
無線加速度傳感器節點內置MEMS電容三軸或單軸加速度傳感器芯片,能夠響應緩變的低頻加速度。共選取4個三軸加速度傳感器和1只單軸加速度傳感器,安放在氣墊船不同位置,分別測量首部、尾部及重心處加速度。
氣墊船的操縱面參數包括槳距角、舵角和側風門,均需通過傳動機構來實施操縱[4],需專門研發相應的測量方法,選擇合適的傳感器進行采集,并設計專門的安裝結構。選用拉繩傳感器對操縱面參數進行測量,通過拉繩傳感器的位移變化換算操縱面所對應的角度變化。
環境參數包括風速、風向、浪高、浪向、氣溫以及氣壓等。風速與風向通過無線風速、風向傳感器節點實現,浪高測量使用浪高儀。環境氣壓由高精度手持氣壓溫度表測得并記錄。
各參數測量所用傳感器及接入方式見下頁表1。
圍裙囊壓和氣墊內壓力的測量選用兩種類型的壓力傳感器:薄片壓力傳感器和微型壓力傳感器,根據測量位置的特點分別布置。薄片傳感器厚度<5 mm,可以直接粘貼在測試表面進行檢測,對流場影響較小,同時具有高頻動態響應,抗振能力強,可用于氣墊內壓力測試。微型壓力傳感器安裝方便,可靠性強,可用于測量大囊內壓力。圍裙囊壓和墊壓的測量共使用34個壓力傳感器,分別布置于圍裙大囊和船底氣墊內。船底氣墊內共布置16個,全部為耐腐蝕的膜片壓力傳感器。考慮到不破壞氣墊船底板,安裝采取膠粘方式,且未進行任何打磨。圍裙大囊內分別布置18個螺紋壓力傳感器,固定方式主要采取螺栓連接。數據采集系統的采樣頻率范圍為20 Hz。輸出數據中包括時間序列,用以保證采集數據的同步性。

表1 測試設備及接入方式
1.2 時間同步測試方法研究
數據的時間同步性對氣墊船運動數據采集具有重大意義,運動參數只有滿足同步性要求,才能體現氣墊船的運動響應特性及航行特性,因而需進行時間同步設計。傳感器節點信號傳輸時間不同步的主要原因有:
(1)節點內部定時晶振固有的頻率偏差和時間累計誤差;
(2)節點接受時間時產生的時延誤差。
通過開發不使用浮點運算、占用內存小的時間同步技術,解決了上述2項時間不同步問題。
對于授時產生的時延誤差,其消除方法為:在主節點同步之前,先發送前導碼和同步字符,給同步信號命令包打上時間標志t0,接收節點收到前導碼和同步字符時,記下本地時間t1,在開始處理接收到的數據包時,記下時間t2,根據發送位數n和發送每比特需要的時間t,可以估算出前導碼和同步字符的發送時間為nt,接收節點的時鐘調整為t0+nt+(t2-t1),從而消除授時的時延誤差。
對于晶振的固有偏差和時間累計產生的誤差,在計算時間同步時,直接采用具有較高時間分辨率的計時器所測數值。在測試過程中,每60 s同步授時一次,硬件計時器的差值剛好等于軟件修正晶振的值,此時的晶振修正后偏差可達2.5×10-7MHz。隨后,每隔60 s同步校正一次,可達到時鐘同步精度0.1 ms。該算法巧妙利用硬件電路特性,對晶振的偏差估計不使用復雜的浮點運算,減小了同步的開銷。
2 氣墊船登灘過程描述
氣墊船登灘測試在南海某海域進行。測試當天天氣晴朗,海況等級為1~2級,未見明顯浪高。登灘位置為沙地,氣墊船登灘時狀態為滿載排水量。
氣墊船的登灘運動具體可劃分為三個階段:近岸航行階段、登灘階段和陸上運動階段。在近岸航行階段,氣墊船首先從海里穿過進入近岸區,該區域內水深小于氣墊船的長度,淺水興波阻力較大,傅汝德數為0.35時,可達水深的3倍,因而該階段航行時阻力會增加,操作不當會引起航速迅速下降。當氣墊船首部抵達岸灘瞬間開始進入登灘階段,具體的登灘過程如圖1所示。

圖1 氣墊船登灘過程
圖1(a)為氣墊船首部抵達岸灘瞬間,也為登灘的初始時刻。由于本次測試的登灘點處岸灘為傾斜角約5°、長度約為船長1/5的斜坡,因而登灘階段又可劃分為三個過程:首部爬坡過程、中間爬坡過程和尾部爬坡過程。首部爬坡過程是指氣墊船首部開始離開水面進入岸灘,但尚未到達坡頂這一運動階段,如圖1(b)所示;中間爬坡過程是指氣墊船首部已經達到坡頂進入岸灘航行,但其尾部尚未離開水面的過程,如圖1(c)所示;尾部爬坡過程是指氣墊船尾部脫離水面,但尚未至坡頂的一段過程,如圖1(d)所示。當氣墊船尾部離開坡頂后,進入陸上運動階段。在此次測試過程中氣墊船在岸灘航行一段時間后掉頭重新返回海中。
3 氣墊船登灘運動測試結果及分析
選取登灘點處為坐標原點,選取氣墊船首部抵灘時間,即氣墊船處于圖1(a)的位置時為初始時刻,測試結果如圖2 -圖5所示。
圖2為氣墊船在測試過程中的航行軌跡,橫坐標為氣墊船在東西方向上的無因次移動距離,縱坐標為氣墊船在南北方向上的無因次距離,無因次距離指氣墊船移動的距離與其艇縱向長度的比值。
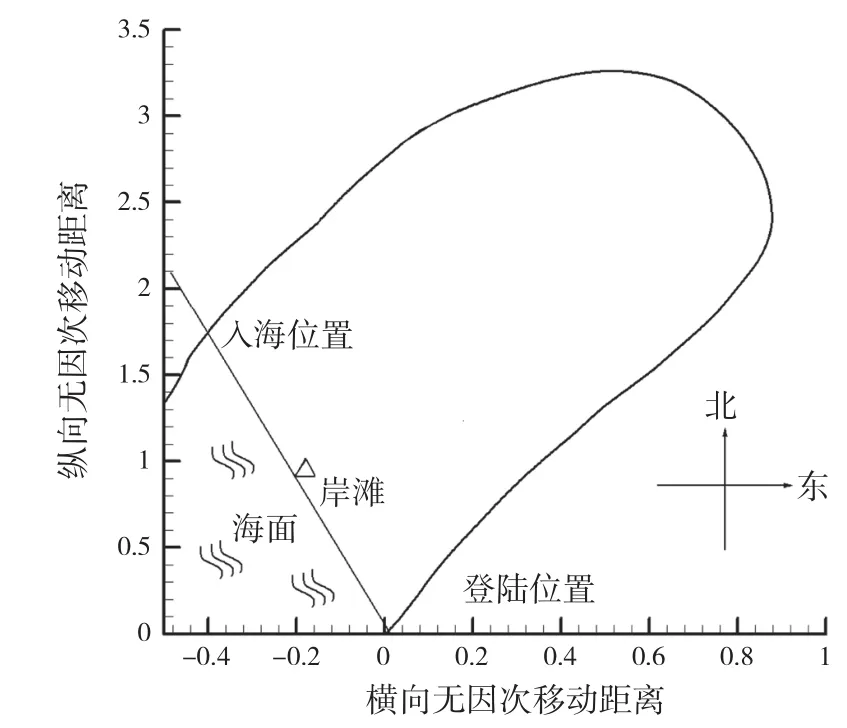
圖2 氣墊船登灘運動軌跡
由圖2可見,氣墊船在與岸灘近似垂直的角度登灘后,向陸地深處航行約4倍艇長距離后,掉頭重新返回海中。
圖3為氣墊船登灘過程中螺距角的平均值及其對應的傅汝德數的變化過程,其中實線為氣墊船登灘過程中平均螺距角隨時間的變化,虛線為登灘過程中航行傅汝德數隨時間的變化,圖中橫坐標為測試時間,初始時刻為登灘的瞬間,左邊縱坐標為航行的傅汝德數,右邊的縱坐標為氣墊船的平均螺距角。

圖3 氣墊船登灘運動航速和平均螺距角
由圖3可見,氣墊船在近岸航行過程中通過變化螺距角調整登灘航速,航速隨著螺距角減小不斷下降。在登灘瞬間,傅汝德數約為0.2,并且螺距角基本不再變化。由于慣性及岸灘坡度的影響,航速繼續下降。為確保登灘成功,在氣墊船首部登上岸灘后開始增加螺距,最終航速穩定在傅汝德數0.18左右。登灘過程從首部抵達岸灘開始至尾部離開斜坡結束,持續15 s之后進入陸地運動過程。
圖4為氣墊船登灘過程縱橫傾角的變化曲線。圖中橫坐標為航行時間,縱坐標為傾角,實線代表縱傾角的變化特性,虛線代表橫傾角的變化特性。

圖4 氣墊船登灘運動傾角變化
由圖4可見,在近岸航行階段,氣墊船的縱、橫傾角并非穩定不變,而是呈現一定的波動,波動幅值約為0.5°,這是航速變化、淺水效應及近岸浪共同影響的結果。在登灘階段,當氣墊船處于首部爬坡過程中時,受到坡度和氣墊船爬升高度的影響,縱傾角開始持續增加,并在首部抵達坡頂時達到約2.2°的最大值。當氣墊船的首部離開斜坡進入平地的瞬間,首部泄流區增加,受此影響縱傾角會有所下降。測試顯示本次登灘縱傾角下降約0.6°,之后穩定在1.7°左右,呈小幅波動狀態,并持續整個中間爬坡過程。進入尾部爬坡過程后,隨著氣墊船尾部不斷爬升,縱傾角開始迅速下降,并在尾部到達坡頂后穩定在0.4°左右。在氣墊船登灘過程中,橫傾角也小幅增加,最高時左傾達0.5°。這是由于氣墊船登灘過程中并非完全垂向登灘,而是與斜坡有10°左右的角度差,導致重心位置偏左。
圖5為氣墊船登灘過程氣墊壓心和重心縱向相對位置的變化曲線。圖中橫坐標為時間,縱坐標為壓心位置與重心位置之間的縱向相對距離。

圖5 氣墊船登灘運動氣墊壓心變化
由圖5可見,在登灘階段,當氣墊船首部開始爬坡時,壓心與重心間距離開始增加,即壓心開始向前移動。這主要由于氣墊船首部爬坡過程中,斜坡封閉了首部圍裙泄流區,導致前氣室壓力增加,壓心位置前移并在首部抵達坡頂時,與重心距離達到最大值約0.055倍艇長。當氣墊船的首部離開斜坡進入平地的瞬間,首部泄流區增加,受此影響,壓心位置向后移動約0.005倍艇長。進入尾部爬坡過程后,尾部泄流區面積減小,尾部氣室壓力開始增加,壓心位置因而進一步后移。
比較圖4和圖5可見,壓心位置變化趨勢與縱傾角變化趨勢基本一致,這說明縱傾角的變化主要是由壓心位置移動造成。本次測試參數變化趨勢與相關氣墊船仿真和測試結果基本吻合[5-7],說明測試結果真實可信。
4 結 論
本文選取某型氣墊船登灘過程為研究對象,通過自主研制的測試系統對氣墊船登灘爬坡過程的運動特性進行測試,獲得氣墊船登灘過程中的位置、航速、螺距角、縱傾角、橫傾角以及壓心位置等特性參數的同步結果。結果表明,氣墊船在登灘爬坡過程中,縱傾角和壓心位置會產生較大波動,且兩者變化趨勢基本一致。通過本文的測試與分析,不僅積累了重要的實艇登灘過程運動數據,掌握實艇登灘過程的運動規律,也提高了該項氣墊船使用的技術保障能力。
[參考文獻]
[1]惲良. 氣墊船原理與設計[M]. 北京:國防工業出版社,1990.
[2]王洪修. 適應新時期軍事斗爭需要加速軍用氣墊船發展[C]. 航海技術現狀與發展趨勢論文集(2001),廣州,2001:117-119.
[3]馬濤,鄔成杰. 氣墊船總體性能與圍裙氣墊系統流體動力設計[M]. 北京:國防工業出版社,2012.
[4]張根泉. 淺談高密度氣墊船的空氣舵設計及其氣動力性能[J]. 船舶,2003(6):37-38.
[5]盧軍,黃國梁. 全墊升氣墊船4自由度操縱性[J]. 上海交通大學學報,2007(2):216-220.
[6]冀楠. 全墊升氣墊船運動特性研究[D]. 哈爾濱:哈爾濱工程大學博士學位論文,2014.
[7]付明玉,張洪雨,施小成,等. 氣墊船操縱性能理論分析[J]. 中國造船,2006(3):14-20.
