電動(dòng)摩托制動(dòng)控制器的設(shè)計(jì)
2018-04-29 08:42:34柯寶中毛丹徐銘武
廣西科技大學(xué)學(xué)報(bào) 2018年1期
關(guān)鍵詞:仿真
柯寶中 毛丹 徐銘武
摘 要:為解決由電動(dòng)摩托剎車系統(tǒng)不完善造成的問題,結(jié)合三相永磁同步電機(jī)原理,提出了一種基于PWM控制策略及PI閉環(huán)控制方法的電動(dòng)摩托輔助制動(dòng)控制器.首先,通過測定的電機(jī)轉(zhuǎn)速和不同剎車角度時(shí)電機(jī)期望轉(zhuǎn)速的差值,經(jīng)過PI控制器調(diào)節(jié)產(chǎn)生相應(yīng)的控制信號,并以此控制信號和所測電機(jī)轉(zhuǎn)過的機(jī)械角度作為PWM控制器的輸入量;然后,經(jīng)過一系列邏輯運(yùn)算產(chǎn)生六路PWM控制信號,控制三相逆變器的晶體管達(dá)到電機(jī)減速的目的;最后,通過搭建Matlab/Simulink仿真模型,進(jìn)行仿真結(jié)果的對比與分析.結(jié)果表明:設(shè)計(jì)方案可實(shí)現(xiàn)高性能的控制策略,完成緊急時(shí)刻的減速要求,滿足電動(dòng)摩托的制動(dòng)需求,即使在誤操作過程中也不會(huì)影響制動(dòng)效果,可減少安全事故.
關(guān)鍵詞:PWM控制器;電動(dòng)摩托輔助制動(dòng);PI控制器;仿真
中圖分類號:U482.3 DOI:10.16375/j.cnki.cn45-1395/t.2018.01.015
0 引言
隨著當(dāng)今社會(huì)工業(yè)不斷發(fā)展,石油資源消耗與日俱增,導(dǎo)致石油資源匱乏和環(huán)境污染嚴(yán)重.電動(dòng)摩托車采用永磁同步電機(jī)制動(dòng),具有操作簡單、騎乘舒適、無污染低噪聲等特點(diǎn),相比燃油摩托更加節(jié)能環(huán)保.同時(shí)綠色、節(jié)能理念的倡導(dǎo)普及,使得電動(dòng)摩托這種具有無排放、節(jié)能、輕便、價(jià)格適中等優(yōu)點(diǎn)的交通工具受到許多人的喜愛,成為現(xiàn)在很多城市居民短距離出行首選的交通工具.然而道路車輛越來越多,交通環(huán)境越來越復(fù)雜,產(chǎn)生了更多的安全問題,人們對電動(dòng)車的制動(dòng)性能要求不斷提高.電動(dòng)摩托控制器作為控制核心決定著整個(gè)電動(dòng)車的性能[1-2],因此,需要設(shè)計(jì)一種制動(dòng)效果良好的電動(dòng)摩托輔助制動(dòng)控制器.
傳統(tǒng)的電動(dòng)摩托上只有機(jī)械制動(dòng)很少有輔助制動(dòng),在緊急情況下會(huì)增加事故發(fā)生率.目前電動(dòng)摩托車主要采用永磁無刷直流電動(dòng)機(jī),控制簡單、運(yùn)行穩(wěn)定,但是無刷直流電動(dòng)機(jī)的控制策略存在較嚴(yán)重的轉(zhuǎn)矩脈動(dòng)問題.近幾年,國內(nèi)外一些公司的控制器以DSP(數(shù)字信號處理器)為主控芯片,這類控制器功能強(qiáng)大、處理數(shù)據(jù)速度快,由于芯片價(jià)格昂貴,使得生產(chǎn)成本提高,無法大規(guī)模推廣應(yīng)用.柴介雄[3]曾提出一種簡單的抑制換相轉(zhuǎn)矩脈動(dòng)的PWM調(diào)制策略,使得電機(jī)換相轉(zhuǎn)矩脈動(dòng)明顯減小,但是缺少輔助制動(dòng)效果.通過分析國內(nèi)外發(fā)展現(xiàn)狀,以永磁同步電機(jī)作為研究對象,提出了電機(jī)控制原理和控制方法,設(shè)計(jì)了一個(gè)具備完善剎車系統(tǒng)的電動(dòng)摩托輔助制動(dòng)控制器.
1 永磁同步電機(jī)電動(dòng)摩托制動(dòng)控制設(shè)計(jì)
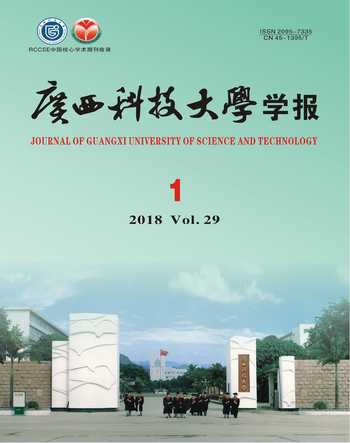
設(shè)計(jì)以永磁同步電機(jī)為電動(dòng)摩托的控制對象,其中三相永磁同步電機(jī)主要是由永磁同步電機(jī)、轉(zhuǎn)子位置傳感器(BQ)和電子開關(guān)電路三部分組成的電機(jī)系統(tǒng).控制制動(dòng)的部分是通過給定的速度和剎車給定的速度作為輸入信號控制制動(dòng)控制器,制動(dòng)控制器通過控制電子開關(guān)實(shí)現(xiàn)電動(dòng)摩托的制動(dòng)控制,其結(jié)構(gòu)如圖1所示.
1.1 永磁同步電機(jī)結(jié)構(gòu)及其原理
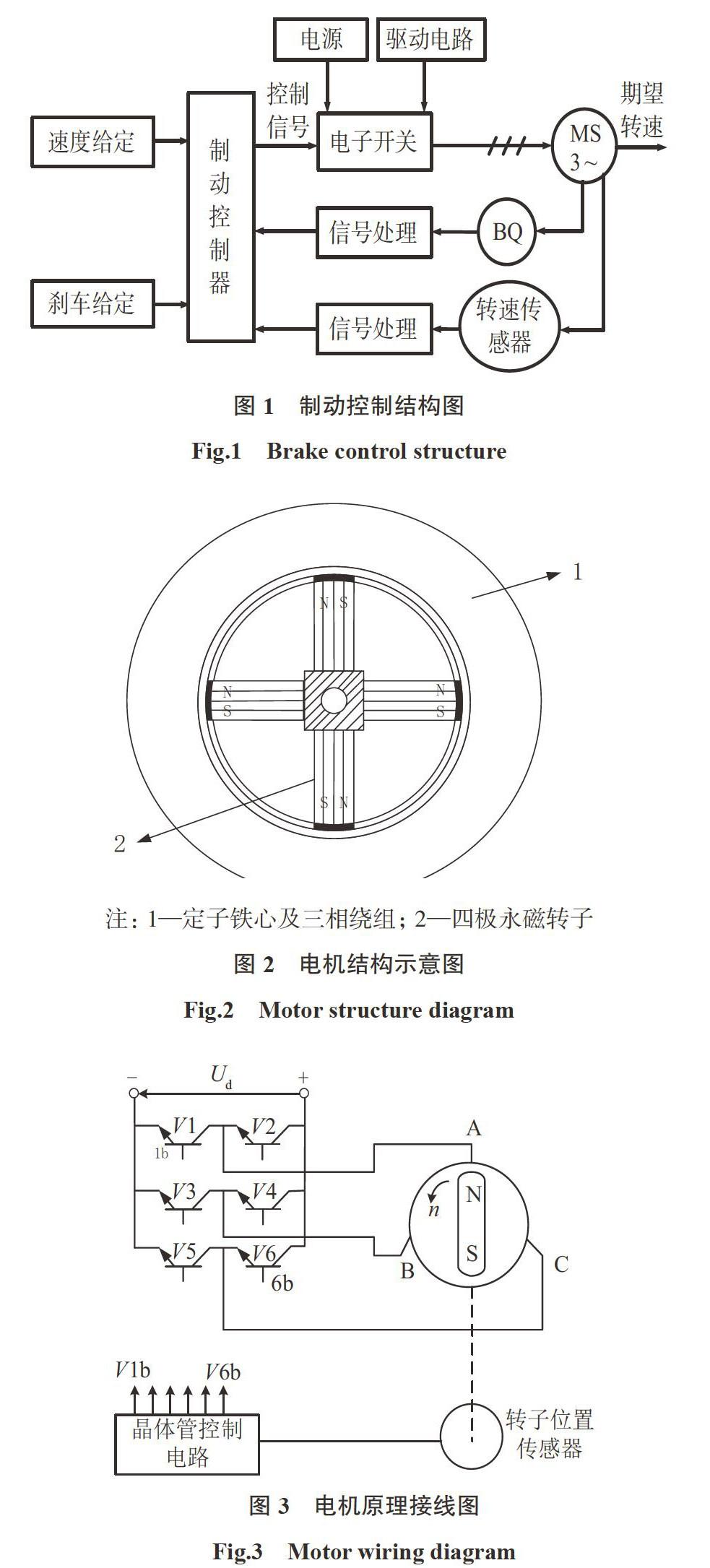
一個(gè)四極永磁同步電機(jī)的結(jié)構(gòu)示意圖如圖2所示.
電機(jī)包括定子和轉(zhuǎn)子兩大部分,定子內(nèi)部含有鐵心且鐵心內(nèi)裝有接成星形或三角形的三相交流繞組,它是電機(jī)的電樞繞組,其作用是用來產(chǎn)生同步旋轉(zhuǎn)磁場.轉(zhuǎn)子則是由高磁能積的稀土等磁性材料制成永磁式轉(zhuǎn)子.根據(jù)磁場的觀點(diǎn)可以把電機(jī)的運(yùn)動(dòng)看成主磁場Bf(勵(lì)磁磁場)和電樞磁場Ba相互作用的結(jié)果.
在直流電機(jī)中主磁場Bf 的空間位置是靜止的,電樞是旋轉(zhuǎn)的.通過電刷或者換向器的作用,可把通過電源輸入的直流電轉(zhuǎn)換成交流電輸入到直流電機(jī)電樞中,保證了在旋轉(zhuǎn)過程中電樞的電流方向始終沒變,使得電樞磁場Ba和主磁場Bf的相對空間位置不變[4-5].它們之間夾角θ=90°就能使電機(jī)開始轉(zhuǎn)動(dòng).同理,對于三相永磁同步電機(jī)來說也可以通過同樣的方式使電機(jī)工作.三相永磁同步電機(jī)原理接線圖如圖3所示.
在三相同步電機(jī)中,只要使電刷與磁極同步旋轉(zhuǎn),Ba與Bf 相對位置保持一致,即使不是相互垂直,電動(dòng)機(jī)也會(huì)繼續(xù)旋轉(zhuǎn),但是產(chǎn)生的電磁轉(zhuǎn)矩不是最大,甚至Ba和Bf 的位置可以在一定的范圍內(nèi)變化,只要變化的電磁轉(zhuǎn)矩能滿足使電機(jī)產(chǎn)生所需平均電磁轉(zhuǎn)矩的要求即可[6].可通過晶體管隨時(shí)控制電流的導(dǎo)通與截止,使得三相永磁同步電機(jī)的電樞繞組中電流產(chǎn)生與轉(zhuǎn)速相應(yīng)的旋轉(zhuǎn)磁場,保證Ba和Bf 的空間位置相對穩(wěn)定,來獲得一定的平均電磁轉(zhuǎn)矩使轉(zhuǎn)子運(yùn)行.
1.2 電動(dòng)摩托的制動(dòng)控制方法
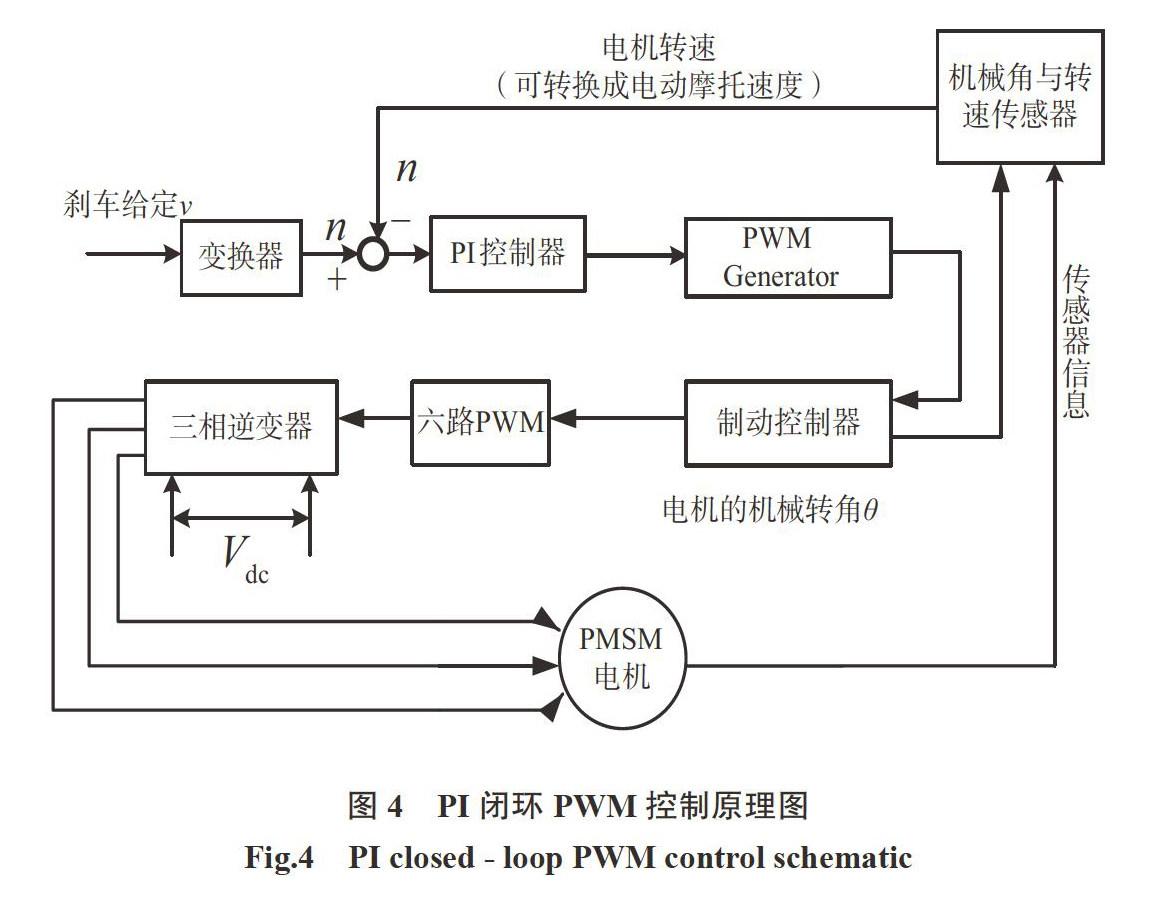
PMSM電機(jī)采用PI閉環(huán)的PWM控制如圖4所示.
首先通過電動(dòng)摩托的剎車角度輸出對應(yīng)剎車時(shí)得到的期望速度,再將此時(shí)的速度通過速度變換器變換成對應(yīng)的轉(zhuǎn)速,同時(shí)與電機(jī)上轉(zhuǎn)速傳感器檢測到的實(shí)際轉(zhuǎn)速作對比,得到其差值通過PI控制器進(jìn)行計(jì)算,獲得值通過限幅控制器和增益環(huán)節(jié)將其限制在-1~1之間變化,將此時(shí)得到的信號輸入到單相PWM控制器中.理論上對于PWM控制器而言載波頻率越高,則電壓波的占空比越大,電流的高次諧波成分越小,電流的平滑性越好,電機(jī)的振動(dòng)越小,運(yùn)行噪音越小,電機(jī)發(fā)熱越少.但是,載波頻率越高,諧波電流頻率也越高,電機(jī)定子的肌膚效應(yīng)嚴(yán)重,電機(jī)損耗越大,輸出功率越小,所以調(diào)到一個(gè)合適的載波進(jìn)行控制十分重要[7].通過單相PWM控制器產(chǎn)生的PWM控制信號和電機(jī)的轉(zhuǎn)角傳感器測得電動(dòng)機(jī)的轉(zhuǎn)角作為制動(dòng)控制器輸入量,產(chǎn)生六路PWM波控制三相逆變器,最終來控制剎車時(shí)電動(dòng)摩托的輔助制動(dòng).在這里為了能夠使電機(jī)得到較好性能的控制,通過傳感器在每一個(gè)周期內(nèi)測出電機(jī)的實(shí)時(shí)轉(zhuǎn)速與給定速度作比較作為PI控制器的輸入信號,形成一個(gè)閉環(huán)控制使得控制效果得到更好的優(yōu)化.設(shè)計(jì)的制動(dòng)控制原理是:首先,通過傳感器測得電機(jī)機(jī)械轉(zhuǎn)角,除以2*π得到電機(jī)旋轉(zhuǎn)圈數(shù),將取整后得到的圈數(shù)和對應(yīng)的機(jī)械轉(zhuǎn)角作為控制量輸入到控制器中進(jìn)行計(jì)算;其次,再將通過控制器得到的6個(gè)數(shù)據(jù)結(jié)果分別與設(shè)定好的6個(gè)常量做減法,得到的結(jié)果與單相PWM控制產(chǎn)生的PWM波進(jìn)行指定的邏輯關(guān)系操作,最終實(shí)現(xiàn)六路PWM控制波對三相逆變器的控制,即電動(dòng)摩托的制動(dòng)控制.
由于車載電池容量有限,限制了電動(dòng)摩托車的行駛路程.電動(dòng)摩托車一般采用機(jī)械制動(dòng)、摩擦阻力制動(dòng)和電阻制動(dòng)等傳統(tǒng)的制動(dòng)方式,在很大程度上浪費(fèi)了能量.為保證制動(dòng)性能的同時(shí),有效地回收制動(dòng)能量,設(shè)計(jì)方法如2所述.車輛處于制動(dòng)狀態(tài)時(shí),車速與電機(jī)轉(zhuǎn)子的角速度成比例.電機(jī)轉(zhuǎn)子的轉(zhuǎn)速直接決定了電機(jī)產(chǎn)生的電壓大小和頻率.本文設(shè)計(jì)中電機(jī)采用的是三相永磁同步電機(jī),發(fā)出的是交流電,不能直接為電池組充電,故先對交流電進(jìn)行整流,再對整流后的直流電進(jìn)行變壓,并經(jīng)PWM信號通過控制功率變換器的工作控制制動(dòng)能量回收.
2 電動(dòng)摩托制動(dòng)控制器的設(shè)計(jì)
2.1 PWM控制技術(shù)在三相逆變橋中的應(yīng)用
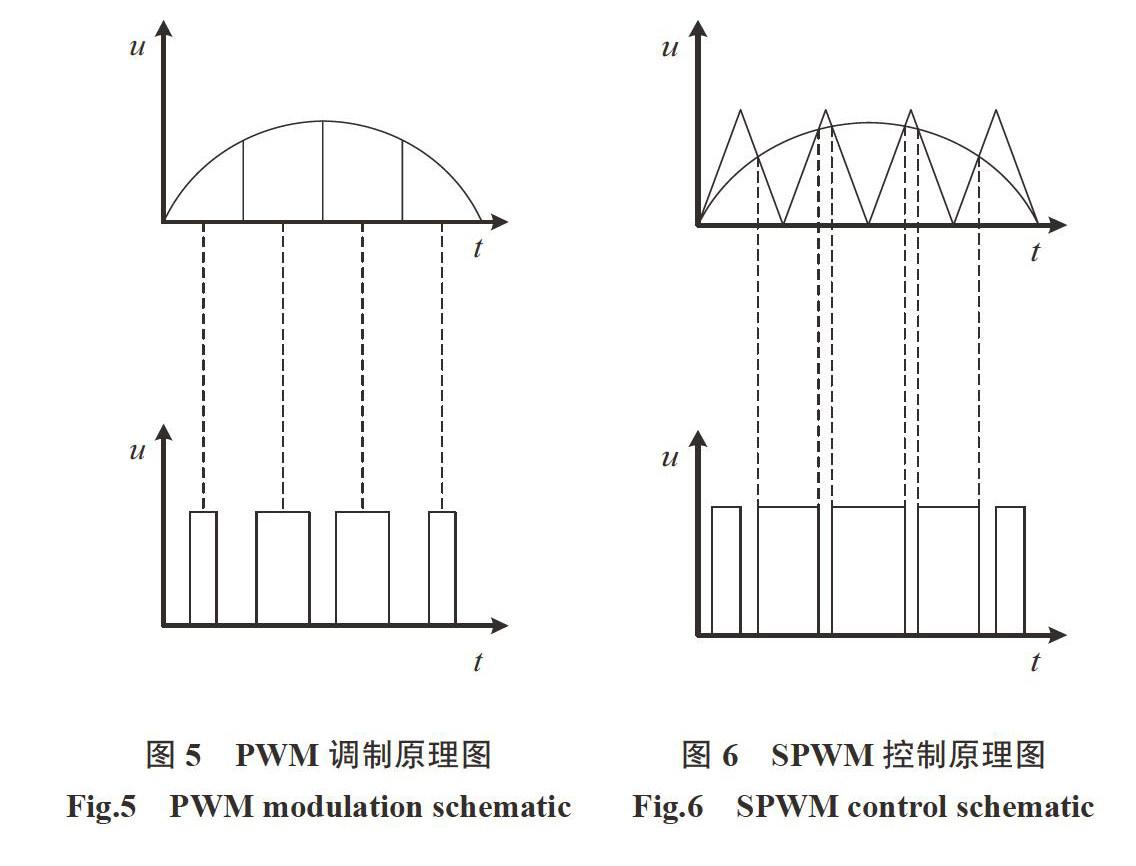
PWM脈寬調(diào)制控制技術(shù),基本工作原理是通過控制電力電子半導(dǎo)體開關(guān)器件,改變直流電的形狀和幅值,從而產(chǎn)生相應(yīng)的電壓脈沖序列. PWM調(diào)制原理圖如圖5所示.通過調(diào)節(jié)電壓脈沖的脈沖周期以及脈沖寬度,實(shí)現(xiàn)變壓變頻作用[8].三相永磁同步電機(jī)的轉(zhuǎn)速控制就是利用此原理控制的.而脈寬的控制則是通過載波和調(diào)制波兩者決定,這里以正弦波作為調(diào)制信號,三角波作為載波信號進(jìn)行具體的說明.以正弦波作為逆變器輸出的期望波形,以等腰三角波作為載波,其頻率比期望高得多,并用頻率和期望波相同的正弦波作為調(diào)制波.由調(diào)制波與載波的交點(diǎn)確定逆變器開關(guān)器件的通斷時(shí)刻,獲得正弦調(diào)制波半個(gè)周期內(nèi)呈兩邊窄中間寬的一系列等幅不等寬的矩形波,按照面積相等的原則(每一個(gè)矩形波的面積與相應(yīng)位置的正弦波面積相等),因而這個(gè)序列的矩形波與期望的正弦波等效[9-10].這種方法也稱之為SPWM正弦脈寬調(diào)制法.由于在一定載波的情況下不同調(diào)制波的頻率和幅值決定了調(diào)制后電壓的均值或者頻率,所以最終實(shí)現(xiàn)了變壓或變頻調(diào)速的目的.SPWM調(diào)制的基本原理如圖6所示.
2.2 PWM在電動(dòng)摩托中的制動(dòng)研究
依據(jù)以上PWM控制技術(shù)在三相逆變橋中的應(yīng)用,電動(dòng)摩托的制動(dòng)控制也利用同樣的原理,只是根據(jù)不同情況控制產(chǎn)生的PWM脈寬不同而已.電動(dòng)摩托制動(dòng)控制器的設(shè)計(jì)在保證制動(dòng)調(diào)速性能的基本前提條件下,需要考慮路況導(dǎo)致負(fù)載變化時(shí)對制動(dòng)控制的影響.所以在制動(dòng)過程中要同時(shí)考慮轉(zhuǎn)速、輸出的轉(zhuǎn)矩和功率.對已有的電動(dòng)摩托而言由于它的靈活輕便性,對其輸出功率并沒有很嚴(yán)格的要求.但是,由于三相永磁同步電機(jī)每相繞組都只有部分時(shí)間通電,轉(zhuǎn)子和電樞繞組旋轉(zhuǎn)磁場之間的夾角不斷變化,因此三相永磁同步電機(jī)會(huì)產(chǎn)生電磁轉(zhuǎn)矩脈動(dòng),用開環(huán)控制將會(huì)導(dǎo)致制動(dòng)控制性能變差[8].基于此設(shè)計(jì)采用了PI閉環(huán)控制提高制動(dòng)控制性能,同時(shí)主要考慮的是在制動(dòng)的情況下能使電機(jī)以當(dāng)前行駛的速度在執(zhí)行制動(dòng)請求后,能使電動(dòng)摩托的速度降到一定的安全值,對應(yīng)到電機(jī)中就是能使電機(jī)在相對高轉(zhuǎn)速轉(zhuǎn)動(dòng)時(shí),通過制動(dòng)請求之后降低電機(jī)的轉(zhuǎn)速以保證人身和車輛的安全.這里還需要考慮即使電動(dòng)摩托在帶負(fù)載時(shí)也能保證制動(dòng)請求后電動(dòng)摩托的轉(zhuǎn)速降到期望值.為了確保更好的安全性能,防止人們在緊急情況下的誤操作,設(shè)計(jì)制動(dòng)請求命令優(yōu)先于電動(dòng)摩托的加速命令,即在請求制動(dòng)時(shí)電動(dòng)摩托的加速命令是不能執(zhí)行的.
本文中設(shè)計(jì)的電制動(dòng)系統(tǒng)模型中的電機(jī)采用的是三相永磁同步電機(jī),相較于異步電機(jī),三相永磁同步電機(jī)比異步電機(jī)節(jié)能20%以上,這意味著在同等車況下,不增加電池組容量,采用同步電機(jī)的汽車比采用異步電機(jī)的汽車有更長的續(xù)航里程.
制動(dòng)控制器的設(shè)計(jì)結(jié)構(gòu)如圖7所示,這是電動(dòng)摩托制動(dòng)控制的核心部分,通過轉(zhuǎn)速傳感器測得電機(jī)的轉(zhuǎn)速和剎車制動(dòng)時(shí)所達(dá)到的期望轉(zhuǎn)速相減,得到的結(jié)果通過PI控制器進(jìn)行調(diào)節(jié)得到調(diào)制信號輸入到單相PWM控制器中.此時(shí)PWM控制器中所用的載波頻率為3 000 Hz,將調(diào)制信號和載波信號作用后得到單相PWM信號,與位置傳感器測得的機(jī)械角作為制動(dòng)控制器的輸入量,通過如圖7所示的一系列邏輯運(yùn)算之后將會(huì)得到六路PWM波,完成對三相逆變器的控制,最終在觸動(dòng)剎車時(shí)實(shí)現(xiàn)對電動(dòng)摩托的制動(dòng)控制.
其中PI控制器的功能是根據(jù)當(dāng)前的車速與制動(dòng)控制時(shí)達(dá)到的期望車速的差值產(chǎn)生相應(yīng)的控制信號,PI控制器的數(shù)學(xué)模型可描述為:
其中,比例環(huán)節(jié)為u(n)=x1(n)-x2(n),積分環(huán)節(jié)為,x1(n)為制動(dòng)后期望的轉(zhuǎn)速,x2(n)為電機(jī)當(dāng)前的轉(zhuǎn)速,u(n)為系統(tǒng)輸入,y(n)為系統(tǒng)輸出.Kp, KI分別為PI控制器的比例與積分控制參數(shù).需要通過大量的嘗試才能調(diào)出更好的結(jié)果.
3 制動(dòng)控制仿真分析
為了驗(yàn)證設(shè)計(jì)的制動(dòng)控制器的正確性和有效性,在Matlab/simulink中建立仿真模型進(jìn)行仿真實(shí)驗(yàn)分析.同時(shí)建立了經(jīng)典的在開環(huán)和閉環(huán)下的SPWM控制逆變器實(shí)現(xiàn)的制動(dòng)控制,形成對比分析,使得仿真結(jié)果更具有可信性.
仿真實(shí)驗(yàn)所用的參數(shù)為:N=4,pε=1 kw,R=4.765,L=0.008 5,VDC=110 V,J=0.000 15 kg·m2.為驗(yàn)證設(shè)計(jì)的制動(dòng)控制器在不同負(fù)載下的制動(dòng)控制性能,仿真實(shí)驗(yàn)分別給出了在帶不同負(fù)載的情況下,通過不同程度制動(dòng)后電機(jī)轉(zhuǎn)速由1 000 r/min分別降到500 r/min、0轉(zhuǎn)速波形圖.下面給出電動(dòng)車速度與電機(jī)轉(zhuǎn)速的關(guān)系.
電機(jī)的角速度與轉(zhuǎn)速的關(guān)系:
速度與角速度的關(guān)系:
可得電機(jī)轉(zhuǎn)速和電動(dòng)摩托行駛速度關(guān)系:
其中,ω——電機(jī)的角速度,n——電機(jī)的轉(zhuǎn)速,v——電動(dòng)摩托的速度,R——電動(dòng)摩托的半徑.仿真時(shí)所用的電動(dòng)車直徑為15英寸,得到的電機(jī)的轉(zhuǎn)速和電動(dòng)摩托的速度之比約為50.
公式(5)描述了三相永磁同步電機(jī)作為發(fā)電機(jī)時(shí)其中一相的感應(yīng)電動(dòng)勢:
式中,n——線圈匝數(shù);p——永磁體的級數(shù);φm——磁通最大值,它們由電機(jī)結(jié)構(gòu)決定,在仿真時(shí)作為常量處理. ns是轉(zhuǎn)子轉(zhuǎn)速,與汽車行駛速度相對應(yīng). 轉(zhuǎn)子的角速度和汽車的速度之間的關(guān)系可以用公式(6)描述.
其中,u——電動(dòng)摩托行駛的速度,Rr——電動(dòng)摩托的車輪半徑.當(dāng)電動(dòng)摩托制動(dòng)時(shí)會(huì)放出電,為了簡化不考慮電能回收的問題,就直接在每個(gè)晶閘管并聯(lián)一個(gè)足夠大的電阻保證剎車時(shí)的安全.
圖8(a)、圖8(b)分別給出了在空載情況時(shí)電動(dòng)摩托兩種不同制動(dòng)程度下的效果圖.從圖中可以看出在空載的情況下電動(dòng)摩托在0.5 s制動(dòng)時(shí)電機(jī)的降速時(shí)間基本都小于0.1 s,同時(shí)在不同程度的制動(dòng)時(shí)也能使得制動(dòng)轉(zhuǎn)速波動(dòng)很小,最終得到較好的制動(dòng)效果.圖8(c)、圖8(d)給出了帶載情況下電動(dòng)摩托不同制動(dòng)程度的波形效果圖.從圖中可以看出帶載情況下轉(zhuǎn)速的波動(dòng)比較大,但是并不影響制動(dòng)控制效果,通過此圖可知帶載情況下在不動(dòng)程度的制動(dòng)時(shí),制動(dòng)效果比空載時(shí)效果要好,制動(dòng)時(shí)間比空載制動(dòng)時(shí)要少.
當(dāng)電動(dòng)車接受到制動(dòng)命令時(shí),制動(dòng)控制器產(chǎn)生的六路PWM波形圖如圖9所示.由圖9可知正常行駛時(shí)六路中都有占空比較大的PWM波,但是在制動(dòng)之后只有兩路有占空比很小的PWM波.
為增加實(shí)驗(yàn)仿真的可行度,分別對比了開環(huán)和閉環(huán)時(shí)的SPWM制動(dòng)控制效果,其中SPWM模塊來自于Matlab中自帶模塊.圖10(a)是在開環(huán)制動(dòng)控制時(shí)產(chǎn)生的控制效果圖.
從圖10(a)可知:即使在0.5 s時(shí)采取了制動(dòng),轉(zhuǎn)速也不會(huì)發(fā)生改變,只能完全靠機(jī)械制動(dòng)來改變轉(zhuǎn)速使電動(dòng)摩托車減速.在SPWM閉環(huán)控制中給出了制動(dòng)控制效果如圖10(b)所示,在0.5 s時(shí)開始制動(dòng).由圖10(b)可知當(dāng)用SPWM閉環(huán)控制制動(dòng)時(shí),制動(dòng)時(shí)間相對于本文設(shè)計(jì)的制動(dòng)控制器控制時(shí)間要慢很多,制動(dòng)效果差.
其中一組動(dòng)態(tài)測試結(jié)果如表1所示(其測試環(huán)境是在普通的干燥水泥路面上,摩擦系數(shù)為0.6左右).在帶載重度制動(dòng)下(無輔助制動(dòng))的測試結(jié)果如表1所示.
從表1與表2可知,加了輔助制動(dòng)控制器后制動(dòng)時(shí)間變短,制動(dòng)距離減小,安全性能提高,但是制動(dòng)效果比仿真結(jié)果稍差.
4 結(jié)論
通過對比分析仿真結(jié)果,實(shí)驗(yàn)表明設(shè)計(jì)的制動(dòng)控制器在基于三相永磁同步電機(jī)的電動(dòng)摩托上的輔助制動(dòng)是可行的.制動(dòng)時(shí)可以有效且快速地將電機(jī)轉(zhuǎn)速降下來,且制動(dòng)后電機(jī)的轉(zhuǎn)速波動(dòng)不會(huì)太大,在一定程度上具有較好的制動(dòng)性能,減少機(jī)械制動(dòng)時(shí)對電機(jī)的傷害.該制動(dòng)控制器的制動(dòng)控制方法具有動(dòng)態(tài)響應(yīng)快、控制精度高等優(yōu)點(diǎn),是一種較好的制動(dòng)控制方案,可以廣泛應(yīng)用于電動(dòng)摩托的輔助制動(dòng)控制中.
參考文獻(xiàn)
[1]王佼.無刷勵(lì)磁同步發(fā)電機(jī)轉(zhuǎn)子一點(diǎn)接地保護(hù)的研究[D].北京:華北電力大學(xué),2012.
[2]張樹猛,于士軍. 電動(dòng)汽車制動(dòng)系統(tǒng)設(shè)計(jì)[J]. 河北農(nóng)機(jī),2016(10):50-51.
[3]柴介雄. 小型電動(dòng)車控制器的優(yōu)化設(shè)計(jì)與實(shí)現(xiàn)[D].長沙:湖南大學(xué),2014.
[4]婁妙樹,高遠(yuǎn),袁海英,等. 電動(dòng)汽車用永磁同步電機(jī)的分?jǐn)?shù)階自適應(yīng)控制策略[J]. 廣西科技大學(xué)學(xué)報(bào),2016,27(4):62-67,73.
[5]束文強(qiáng),譚光興,劉夢,等. 模糊控制在純電動(dòng)汽車永磁同步電機(jī)上的應(yīng)用[J]. 廣西科技大學(xué)學(xué)報(bào),2015,26(3):1-6.
[6]王系朋,潘盛輝. 純電動(dòng)汽車電制動(dòng)系統(tǒng)設(shè)計(jì)與仿真[J]. 東莞理工學(xué)院學(xué)報(bào),2016,23(1):104-108.
[7]李敏. 基于PWM整流器的直流母線系統(tǒng)建模與仿真[D].大連:大連海事大學(xué),2009.
[8]于曉丹. 機(jī)車PWM牽引逆變器的電磁干擾研究[D].北京:北京交通大學(xué),2010.
[9]武雁. 基于DSP的7.5kW背靠背變流器控制系統(tǒng)的研究與實(shí)現(xiàn)[D].北京:北京工業(yè)大學(xué),2014.
[10]許中璞,王學(xué)偉,李建岐,等. 低壓電力載波通信與電動(dòng)機(jī)類家用電器電磁兼容性影響分析[J]. 電力建設(shè), 2014, 35(8):77-83.
Abstract: Inspired by the principle of three-phase permanent magnet synchronous motor, we propose the design of an assistant controller for electric motor braking-system based on PWM controlling strategy and PI closed-loop control method. The design first measured the motor speed in normal way and the expected speed at different braking angles. And the PI controller will adjust itself and signal to PMW controller, which will produce six-way PMW signal after logically dealing with the input of the signal by PI controller and the measured mechanical angle of the motor, and the signal will be passed to the three-phase inverter transistor to slow down the speed of motor. By developing one model to simulate different circumstances to test the new design, we can know that the simulation results show the validity and accuracy of the model, which can perform very well even in emergency and meet the needs of controlling the speed of motorcycle perfectly so as to reduce the traffic accidents. Moreover, the system is stable and it still works normal even if it is misused.
Key words: PWM controller; electric motor auxiliary brake; PI controller; simulation
(學(xué)科編輯:黎 婭)
猜你喜歡
中國教育技術(shù)裝備(2016年20期)2016-12-12 10:09:15
中小企業(yè)管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價(jià)值工程(2016年29期)2016-11-14 02:01:16
電子技術(shù)與軟件工程(2016年18期)2016-11-14 00:46:54
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 23:25:33
數(shù)字技術(shù)與應(yīng)用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49