直升機著陸過程中動不穩定現象分析
2018-04-29 00:44:03董明明劉國強于琦
航空科學技術 2018年1期
董明明 劉國強 于琦
摘要:通過分析某型直升機在尾起落架著地時出現的機體異常振動,建立了一種以直升機狀態及操縱參數為基礎,以時頻分析為手段的地面動不穩定性方法。首先分析異常振動與正常振動的異同點,通過時頻分析獲得引起異常振動的現象特征。通過頻率根源查找,最終找出引起異常振動的原因為機體的俯仰模態與旋翼擺振后退型耦合引起的一種動不穩定現象,并對引起該種現象的原因加以分析,給出改進措施,為今后的直升機動不穩定試飛技術提供參考。
關鍵字:旋翼;異常振動;時頻分析;不穩定現象;擺振后退型運動
中圖分類號:V32
文獻標志碼:A
DOI:10.19452/j.issn1007-5453.2018.01.067
旋翼和機體耦合系統的動不穩定性運動(“地面共振”及“空中共振”)是直升機在運轉過程中的動力學問題,它的出現往往在很短的時間內就會導致直升機毀壞,甚至引發人員傷亡。一般直升機在地面運轉過程中,出現的旋翼與機體耦合的不穩定現象,稱為地面共振。對于旋翼與機體系統,若系統隨時間發散,則表明系統不穩定,則系統會發生地面共振現象;若系統隨時間衰減,則表明系統是穩定的,則系統不會發生地面共振現象;若系統隨時間時等幅振蕩,則表明系統處于臨界穩定狀態。
本文針對某型直升機在尾起落架著陸過程中機體振動有明顯增大的現象,以直升機狀態參數為基礎,利用時頻分析方法分析發生引起該異常振動的原因,分析機體的俯仰模態與旋翼擺振后退型耦合導致的機械不穩定現象,同時提出解決該問題的辦法。
1異常振動現象
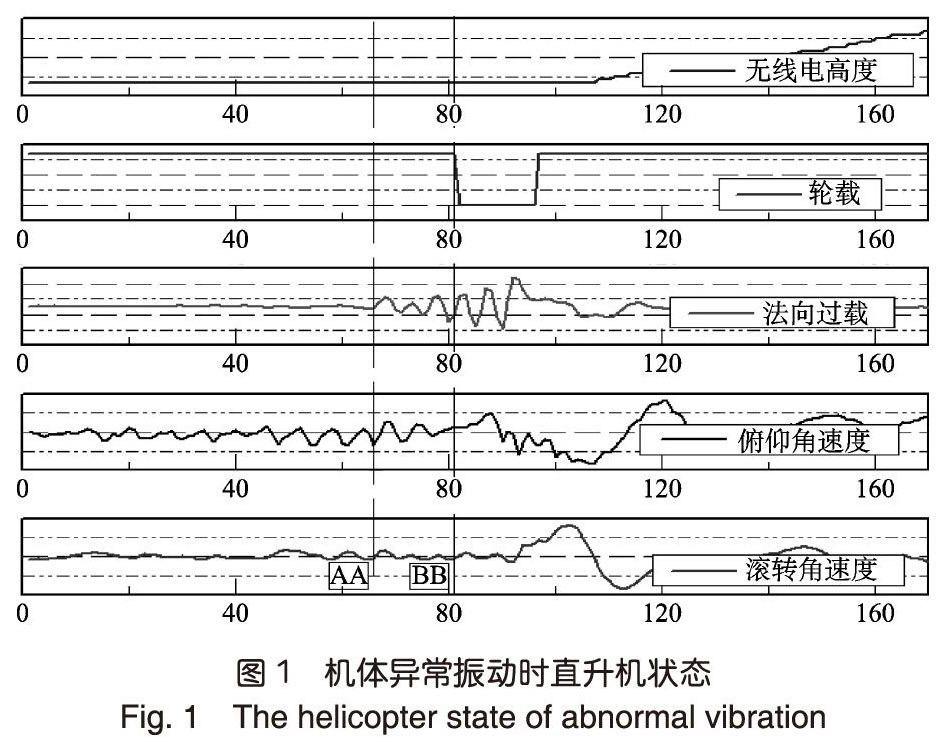
直升機在某次地面著陸時,機體出現了難以忍受的異常振動,飛行員通過提總距使這種異常振動消失。針對機體出現的異常振動,本文對直升機狀態參數進行分析,包括過載信號、俯仰角、滾轉角及飛行員的各項操縱等參數,如圖1和圖2所示,圖1為機體的狀態參數,圖2為飛行員進行的各種操縱。
從圖1看出,法向過載在AA時刻,開始出現突變,當總距在BB時刻時即總距處于中等總距時,法向過載繼續增大,總距放到底時,異常振動繼續增大,之后飛行員迅速提總距,法向過載在提總距過程中出現峰值,過載最大值為1.78,之后異常振動衰減,直至消失。從圖1還可看出,俯仰角速度在AA時刻之前有明顯的不定周期信號,且隨時間變化周期越來越大。
從圖2看出,在AA時刻之前及異常振動過程中,周期變矩桿幾乎沒有變化,腳蹬操縱在BB時刻之后有比較緩慢的腳蹬操縱。而總距操縱在整個降總距過程,有明顯的周期信號。
該型機在之前著陸時,沒有出現該異常振動,且著陸過程較平穩。為便于對比,給出直升機著陸時機體在正常振動時直升機的狀態參數及操縱參數,如圖3和圖4所示。
從圖3看出,直升機在AA時刻,法向過載開始突變,在此過程中飛行員緩慢釋放總距,總距處于BB時刻即處于中等總距時,法向過載最大,過載最大值為1.02,隨后振動逐漸衰減,最終趨于平穩,俯仰角速率的變化有較低的不定周期信號。另外,從圖4看出,總距操縱沒有明顯的周期信號,因此,直升機在此狀態著陸時,飛行員反應著陸動作較平穩,沒有振動發散現象,與上述數據表征特征一致。
對比著陸過程中,異常振動和正常振動的相同點在于:在著陸過程中,過載值均會突然增大;不同點在于:異常振動過載值比正常振動大很多;總距在異常振動時有較明顯的周期信號,而正常振動時沒有較明顯的周期信號;俯仰角速率在異常振動時有較明顯的不定周期信號,且頻率較高,而正常振動時,俯仰角速度的周期信號頻率較低;其中最大的不同在于:異常著陸時,總距降到底時,振動未衰減,反而越來越大;而正常振動時,振動在中等總距量時,振動已衰減。
2異常振動特征分析
從異常振動數據表述特征發現,周期變距桿和腳蹬操縱不是引起異常振動的原因,如圖5~圖10所示。因此,分析時不考慮其操縱的影響。另外從數據發現,總距的操縱及俯仰角速率的變化均有不定周期信號存在,而正常振動的總距操縱未有周期信號,且俯仰角速度的周期頻率也相較于異常振動時低。
為找出引起異常振動的原因,需對異常振動過程的特征進行分析。傳統的方法有時域法和頻域法。傳統的時域法適用于有明顯振動特征的信號,而傳統的頻譜法應用于平穩振動過程的信號處理,而從數據表征來看,總距與俯仰角速率是不定周期,且隨時間有變化,應用上述兩種方法均不能完全的表現信號特征。本文分析時利用時頻分析的方法,該方法可以在時間域觀察頻率及信號能量特征。振動以過載信號分析為準,另外需分析總距操縱量及機體狀態等參數。本文主要分析了直升機在著陸時出現的異常振動與正常振動時法向過載、總距操縱、俯仰角速度等參數。
圖5、圖7和圖9為直升機在著陸時,異常振動過程中的法向過載、總距操縱、俯仰角速度時頻分析圖。從圖中看出,異常振動時,法向過載最大值為1.78,法向過載及總距操縱的4~6s出現幅值增大的趨勢,頻率表現為以4.5Hz為主;俯仰角速度的頻率在整個著陸過程是變化的,頻率在2~4.5Hz變化,呈遞增趨勢,頻率在4.5Hz時響應較大。
圖6、圖8和圖10為直升機在著陸時,正常振動過程中的法向過載、總距操縱、俯仰角速度時頻分析圖。從圖中看出,正常振動時,法向過載量值為1.02,比異常振動時量值小很多,在3~6s發生幅值增大的趨勢,時域首先出現2.5Hz左右的頻率,隨后在5s時出現4.5Hz左右的頻率。總距操縱沒有2~5Hz的特征頻率,俯仰角速率首先出現1.5Hz的頻率,之后出現3Hz左右的頻率,沒有出現4.5Hz的頻率特征。
綜上所述,在異常振動時,機體存在4.5Hz左右的異常頻率且幅值較大,并且總距、俯仰角速度等參數也有該頻率特征出現;而對于正常著陸,機體著陸時首次出現的頻率較低,之后才出現4.5Hz的頻率,總距、俯仰角速度等參數沒有該頻率特征出現。
3原因分析
通過以上數據分析,發現引起異常振動的頻率為4.5Hz,對比全機的模態,發現該頻率為機體的俯仰模態,又因該架機擺振后退型傳到機體的頻率也在4.5Hz附近,因此,引起該異常振動的原因為旋翼的擺振后退型運動與機體的俯仰模態耦合導致的動不穩定現象。一般在地面發生的動不穩定現象,若系統隨時間衰減,則說明系統是穩定的,即起落架系統與旋翼擺振阻尼足夠;若系統隨時間發散,則說明系統是不穩定的,即起落架系統與旋翼擺振阻尼不夠,則會發生地面共振現象。直升機的動不穩定現象包括地面共振和空中共振,發生在地面工作狀態時,一般稱為“地面共振”。直升機地面共振的機理是旋翼后退型擺振運動與槳轂重心有平移的機體模態耦合,機體受到初始擾動后,各片槳葉不均勻地擺振起來,產生一種不平衡的回轉離心力,激起機體在起落架上的振動。若這兩個振動系統存在這樣的關系:旋翼系統產生的離心激振力頻率與全機在起落架上的振動某階固有頻率相同或接近,并且對應固有頻率的固有振型使得槳轂中心在旋轉平面發生振動,同時兩個系統的阻尼不能消耗上述激振力對系統做的功,槳葉的擺振和全機在起落架上的振動就會互相加劇,惡性循環。振幅大到損壞直升機的程度,這種現象稱為“地面共振”。若槳葉減擺器與起落架的阻尼足夠大,或者旋翼系統的離心力激振力頻率與全機在起落架上的振動頻率相差足夠遠,則直升機因外界干擾而激起的振動就會削弱,直至衰減,則不會發生地面共振現象。
在分析地面共振時,建立機體與起落架的空間分析模型,如圖11所示。將直升機看作在彈性起落架上的剛體,旋翼與機體的耦合方程用式(1)表示。其中,式(1)中前兩個公式表示多槳葉擺振平衡方程,后兩個公式表示機體運動方程。式中:ζc=2/NNK=1cosψ看,ζs-2/NNK=1sinψk,ζk,ψk,N分別為第k片槳葉的基階擺振位移、方位角與槳葉片數,Iζ為槳葉轉動慣量,Sζ為槳葉質量靜距,wζ為機體固有頻率,u=NMb/Mb,Mb為單片槳葉質量,X,Y是機體坐標系中的X和Y方向。
式(1)為旋翼系統與起落架系統的耦合方程,一般在分析時,考慮機體的航向、俯仰、側移、滾轉等模態。在理論上可以利用該模型計算系統是否穩定。
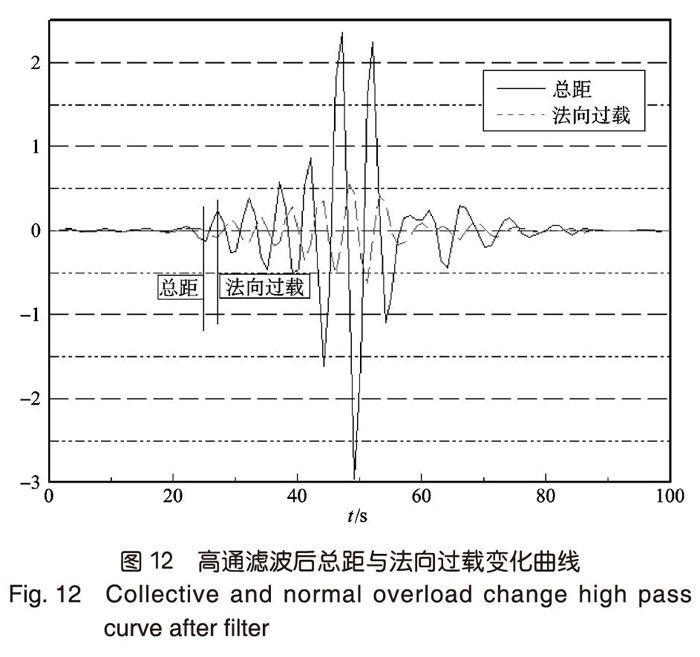
因該直升機為后三點式起落架模式,且尾起落架距離主起落架較遠,在地面滑行過程中或著陸過程中很容易發生俯仰方向上的動不穩定現象。當該直升機著陸時,隨著各個起落架的壓縮,起落架的剛度逐漸增大,使得機體的俯仰模態頻率逐漸增大,當頻率增大到4.5Hz時,即激勵出機體的俯仰模態。又因直升機著陸過程飛行員緊握總距桿,總距桿在此時就以4.5Hz的頻率在振動,而總距與周期變距桿有耦合,直接將該頻率傳遞給旋翼系統,激勵出旋翼的擺振后退型模態,使得擺振后退型模態與機體俯仰模態耦合,進而導致整個機體將以4.5Hz的頻率振動。為說明總距與振動時間先后關系,對總距與法向過載進行高通濾波,如圖12所示,發現總距與法向過載變化趨勢相同,且總距先于法向過載發生,說明引起該動不穩定的原因為總距激勵引起的。對比該型機在其他幾次著陸時,隨著飛行員降總距,振動最終衰減下來,說明系統阻尼是足夠的。而本次著陸試驗會出現如此大的振動(過載),是因在低總距下,旋翼系統幾乎沒有氣動阻尼,系統阻尼會更小,因此在直升機低總距時,振動有增大的趨勢,而此時該振動頻率未衰減,又因飛行員快速提總距,相當于重新給系統一個氣動激勵,因此振動峰值出現在提總距過程中。對于正常著陸時,總距及俯仰角速度在整個頻率段未出現4.5Hz的頻率,從而就不構成頻率的傳遞,因此未發生本文出現的動不穩定現象。
4解決辦法
從分析得知,引起異常振動的原因為旋翼擺振后退型運動與機體俯仰模態耦合引起的動不穩定現象。從俯仰角速度時頻分析曲線對比看出,直升機在接地時刻,異常振動俯仰角速度比正常振動頻率更高一些,這說明異常振動時起落架的剛度較正常振動大。一般引起起落架剛度大的原因有以下幾個方面:
(1)空氣腔初始壓力越大,起落架就越“硬”,緩沖器的壓縮量就越小;
(2)初始容積越小,起落架就越“硬”;
(3)氣體多變指數越大,起落架剛度就越“硬”,初始容積的大小涉及到改變起落架充油量及油液高度等參數,不易操作。
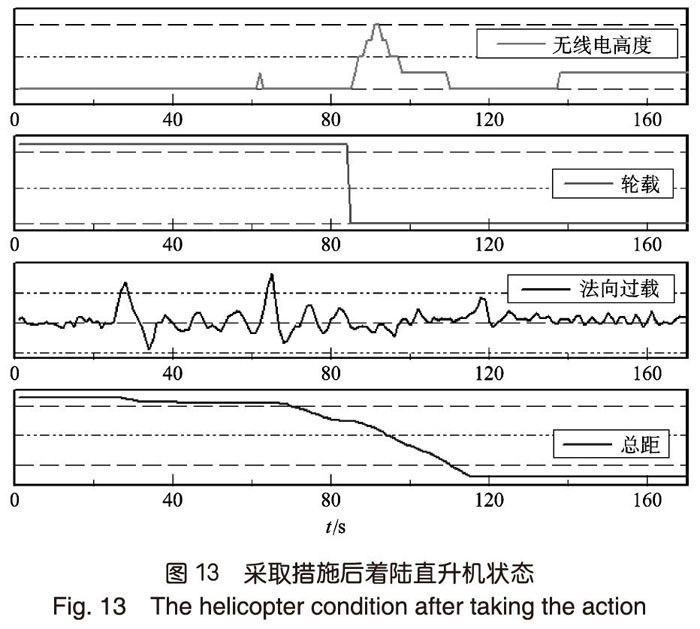
氣體多變指數的改變不易檢測,可以通過減小初始壓力的方法,這個方法容易操作且易檢測。因此,針對起落架剛度硬的特點,通過降低起落架緩沖器初始氣腔壓力,進而降低起落架剛度,使得直升機在俯仰方向上頻率降低。通過該種措施后,該型機著陸比之前平穩很多,如圖13所示。從圖中看出,總距處于中等總距時(如畫實線位置),法向過載已經開始衰減,并且法向過載量值比之前異常振動時降低了很多,過載值為1.1。采用該方法未從本質上解決該不穩定現象,要從根本上解決此間題,就要使旋翼系統產生的激振力頻率與全機在起落架上振動的各階固有頻率分開,并使分開的足夠遠,才能從根本上有效地防止“地面共振”。僅有增加阻尼的辦法消除“地面共振”比較困難。
5結論
本文分析了直升機在著陸時出現的異常振動,通過對數據進行分析,可得出以下結論:
(1)建立了一種分析直升機狀態及操縱參數為基礎的的地面動不穩定性方法。找到引起地面不穩定性的原因,采取降低緩沖器壓力的方法,進而改變直升機著陸時的俯仰角速度的頻率,在一定程度上抑制了地面動不穩定性的發生。
(2)本方法已經應用于型號試飛當中,為今后的直升機著陸過程中的動不穩定現象提供研究方向,為設計改進提供方向,為安全飛行提供理論基礎。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44