慣性導(dǎo)航系統(tǒng)標(biāo)定濾波方法研究
2018-04-29 00:44:03姜雪梅車轉(zhuǎn)轉(zhuǎn)
航空科學(xué)技術(shù) 2018年1期
姜雪梅 車轉(zhuǎn)轉(zhuǎn)

摘要:捷聯(lián)慣導(dǎo)系統(tǒng)標(biāo)定技術(shù)對提高導(dǎo)航精度十分必要,而慣性導(dǎo)航系統(tǒng)標(biāo)定選擇的濾波方法直接影響到標(biāo)定的精度。本文對不同狀態(tài)的濾波估計方法進(jìn)行了理論分析,利用不同標(biāo)定仿真環(huán)境下所采用的卡爾曼濾波及其他濾波方法,對慣性器件誤差及安裝誤差進(jìn)行了估計,并通過仿真分析比較了慣性導(dǎo)航標(biāo)定中各種濾波算法的特點(diǎn)及適用范圍,得出了算法的應(yīng)用建議,對慣導(dǎo)誤差模型標(biāo)定具有一定的工程指導(dǎo)意義。
關(guān)鍵詞:慣性導(dǎo)航;標(biāo)定;濾波;有色噪聲;自適應(yīng)
中圖分類號:V249.32+2
文獻(xiàn)標(biāo)識碼:A
DOI:10.19452/j.issn1007-5453.2018.01,046
慣性器件(陀螺和加速度計)誤差會引起慣性導(dǎo)航(慣導(dǎo))系統(tǒng)(Inertial Navigation System,INS)隨時間累積的導(dǎo)航誤差,影響導(dǎo)航精度。為了提高INS的導(dǎo)航性能,需要對INS進(jìn)行標(biāo)定。系統(tǒng)級標(biāo)定濾波方法是設(shè)計一種合適的濾波器,將慣性導(dǎo)航系統(tǒng)誤差參數(shù)作為濾波器的狀態(tài)變量,通過對導(dǎo)航誤差的量測,實現(xiàn)各誤差模型參數(shù)的標(biāo)定。由于它可以降低對轉(zhuǎn)臺精度的要求,因此受到研究人員的廣泛關(guān)注。
INS誤差模型參數(shù)的標(biāo)定,Blanchard、Grewal分別設(shè)計了不同維數(shù)的狀態(tài)濾波器,估計陀螺誤差參數(shù)和加速度計(加計)誤差參數(shù)。S.P.Dmitriyev對慣導(dǎo)誤差模型標(biāo)定中的非線性濾波技術(shù)做了研究,提出一種優(yōu)于卡爾曼濾波算法(KF)的算法。楊華波采用擴(kuò)展卡爾曼和迭代卡爾曼實現(xiàn)平臺式INS誤差模型參數(shù)的標(biāo)定。王新國利用星光觀測在線估計彈載光纖陀螺捷聯(lián)慣導(dǎo)的陀螺零偏標(biāo)度因數(shù)和安裝誤差,設(shè)計了無跡卡爾曼濾波器UKF。
上述所述主要是針對INS的確定性誤差模型或非線性模型參數(shù)的標(biāo)定進(jìn)行分析和研究。而在實際的慣導(dǎo)誤差模型中,誤差中往往含有有色噪聲等統(tǒng)計特性未知的噪聲,單純采用確定性誤差建模以及非線性模型的濾波器,會引起對誤差的估計偏差,進(jìn)而影響慣性器件的標(biāo)定精度。
本文首先選擇慣導(dǎo)誤差模型,分析各模型存在的問題,進(jìn)而給出相應(yīng)的解決方法。針對有色噪聲誤差,采用擴(kuò)維等方法實現(xiàn)誤差模型參數(shù)標(biāo)定;針對噪聲統(tǒng)計特性未知或時變誤差,采用自適應(yīng)濾波等方法實現(xiàn)誤差模型參數(shù)標(biāo)定。最后,對多種仿真條件下不同濾波方法的估計性能進(jìn)行分析比較,得出INS標(biāo)定濾波方法的應(yīng)用建議。
1慣導(dǎo)誤差模型分析與解決方案
1.1慣導(dǎo)誤差模型
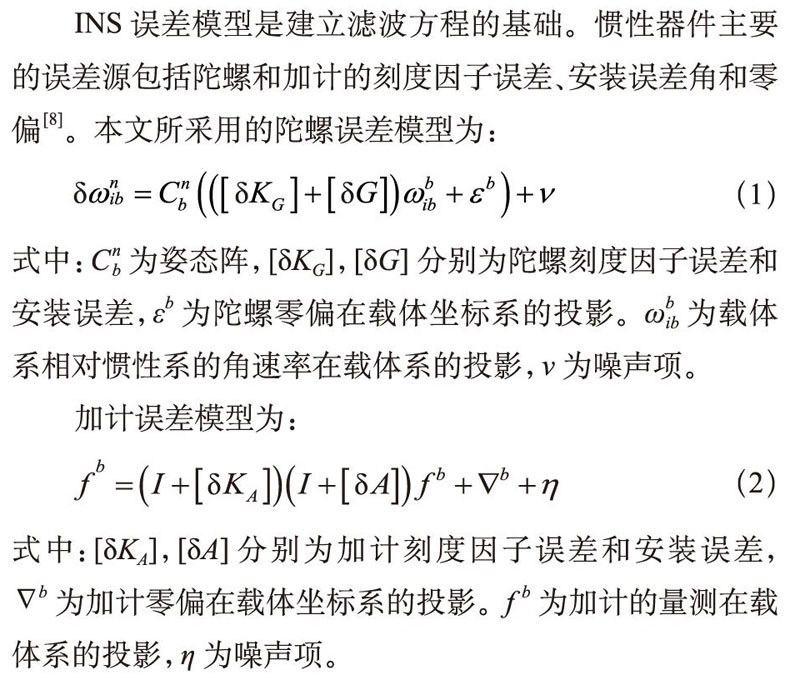
INS誤差模型是建立濾波方程的基礎(chǔ)。慣性器件主要的誤差源包括陀螺和加計的刻度因子誤差、安裝誤差角和零偏。本文所采用的陀螺誤差模型為:式中:Cnb為姿態(tài)陣,[δKG],[δG]分別為陀螺刻度因子誤差和安裝誤差,δb為陀螺零偏在載體坐標(biāo)系的投影。wbib為載體系相對慣性系的角速率在載體系的投影,v為噪聲項。
加計誤差模型為:式中:[δKA],[δA]分別為加計刻度因子誤差和安裝誤差,▽b為加計零偏在載體坐標(biāo)系的投影。fb為加計的量測在載體系的投影,η為噪聲項。
1.12慣導(dǎo)誤差傳播模型
慣導(dǎo)誤差傳播方程描述的是慣導(dǎo)解算誤差與真實導(dǎo)航信息以及慣性器件誤差之間的模型。
1.2.1姿態(tài)誤差方程式中:φ為姿態(tài)誤差角矢量,δwnib為陀螺誤差,wnin為導(dǎo)航坐標(biāo)系到慣性坐標(biāo)系的角速度,@為四元數(shù)乘法。
式(3)為非線性姿態(tài)誤差方程,略去二階小量,可得線性速度誤差方程:
1.2.2速度誤差方程式中:δVn為速度誤差,φn為姿態(tài)誤差角矢量,δKA為加計刻度系數(shù)誤差,δA為加計安裝誤差角,▽b為加計零偏,wnie為地球自轉(zhuǎn)角速度,wnm為導(dǎo)航坐標(biāo)系相對于地球坐標(biāo)系的角速度。
式(5)為非線性速度誤差方程,由于g的誤差量很小,忽略δg的影響,并略去二階小量,可得線性速度誤差方程:
1.2.3位置誤差方程式中:δL為經(jīng)度誤差,δλ為緯度誤差,δh矗為高度誤差。
1.3模型分析與解決方案
1.3.1有色噪聲及解決方案
陀螺和加計的測量誤差用式(1)、式(2)表示,式中的隨機(jī)誤差項一般呈現(xiàn)有色噪聲特性,不能簡單地用高斯白噪聲表示。隨機(jī)漂移大致可以概括為三種分量:逐次啟動漂移、慢變漂移和快變漂移。在標(biāo)定過程中,對陀螺和加計的隨機(jī)誤差進(jìn)行準(zhǔn)確建模,有利于提高確定性誤差的標(biāo)定精度。
卡爾曼濾波要求系統(tǒng)驅(qū)動噪聲和量測噪聲都必須是白噪聲,當(dāng)出現(xiàn)有色噪聲時,卡爾曼算法估計精度會下降甚至失效。針對有色噪聲系統(tǒng),本文采用擴(kuò)維卡爾曼濾波器和H無窮濾波器對有色噪聲下的誤差進(jìn)行標(biāo)定。
擴(kuò)維卡爾曼濾波器有三種:狀態(tài)擴(kuò)維卡爾曼濾波器、量測擴(kuò)維卡爾曼濾波器和擴(kuò)維卡爾曼濾波器”,可以分別解決系統(tǒng)噪聲、量測噪聲以及系統(tǒng)噪聲和量測噪聲為有色噪聲問題。該方法是將濾波方程中的有色噪聲部分?jǐn)U維到狀態(tài)中,使擴(kuò)維后的噪聲滿足白噪聲特性,再進(jìn)行卡爾曼濾波。
H無窮濾波器是在系統(tǒng)噪聲協(xié)方差、量測噪聲協(xié)方差以及狀態(tài)初始協(xié)方差陣未知的情況下,將噪聲以及狀態(tài)初始值的不確定性對估計精度的影響降低到最低程度,使濾波器在最惡劣條件下的估計誤差達(dá)到最小。H無窮濾波是在嚴(yán)重干擾下的最優(yōu)濾波,濾波魯棒性是其最顯著的特點(diǎn)。
1.3.2噪聲統(tǒng)計特性未知或時變問題及解決方案
慣導(dǎo)誤差模型參數(shù)標(biāo)定過程中,經(jīng)常會存在系統(tǒng)噪聲統(tǒng)計特性或量測噪聲統(tǒng)計特性不準(zhǔn)或時變的問題,本文采用自適應(yīng)卡爾曼濾波器解決。自適應(yīng)濾波一方面利用量測不斷地修正預(yù)測值,同時也對未知的或不準(zhǔn)確已知的噪聲統(tǒng)計參數(shù)進(jìn)行估計,即在濾波的同時實時估計噪聲的統(tǒng)計特性,從而提高濾波精度。
Sage-Husa自適應(yīng)濾波算法簡單且具有良好的估計性能,是一種次優(yōu)無偏極大后驗估值器,但它只能解決噪聲統(tǒng)計特性固定但未知的問題。基于漸消記憶指數(shù)加權(quán)的改進(jìn)Sage-Husa噪聲統(tǒng)計估計器,強(qiáng)調(diào)了新近數(shù)據(jù)的作用,對陳舊數(shù)據(jù)漸漸遺忘,因此,可處理時變噪聲統(tǒng)計估計問題。由于噪聲是不能直接采樣的,因此,該濾波器本質(zhì)上是采用基于白噪聲采樣估值的噪聲統(tǒng)計估計器,用噪聲估值器近似代替噪聲采樣值。本文采用了基于噪聲濾波器和平滑器的自適應(yīng)卡爾曼濾波算法與Sage-Husa自適應(yīng)濾波進(jìn)行對比。
2試驗分析
對慣性導(dǎo)航標(biāo)定中的模型含有色噪聲、噪聲統(tǒng)計特性未知或時變、高維系統(tǒng)引起的濾波發(fā)散等問題,采用了不同濾波方法進(jìn)行仿真試驗,分析算法性能。狀態(tài)估計的流程如圖1所示。
首先,利用龍格一庫塔數(shù)值積分方法仿真生成真實軌跡和真實的比力角速率,再根據(jù)慣性器件誤差模型、誤差模型參數(shù)以及真實的軌跡信息和比力角速率信息生成慣導(dǎo)誤差,設(shè)定噪聲仿真生成量測,進(jìn)行狀態(tài)估計,最后根據(jù)估計結(jié)果分析濾波器性能。
試驗參數(shù)設(shè)置:姿態(tài)誤差:O.Olrad,加計、陀螺刻度因子誤差:500ppm (10-6);加計、陀螺安裝誤差:300",加計零偏:1×l0-4g,陀螺零偏:o.1(°)/h,加計噪聲方差:1xlO-6g,陀螺噪聲方差:0.001(°)/h。轉(zhuǎn)臺位置誤差:O.lm,速度誤差:O.Olm/s,角度誤差:10"。轉(zhuǎn)速:10(°)/s;仿真時間:216s(一個編排周期)。初始協(xié)方差矩陣為:經(jīng)度、緯度(lx10-3rad)2,高度(lOm)2,速度(1m/s)2,角度(lrad)2,辨識參數(shù)(1×10-2)2。
標(biāo)定性能評價標(biāo)準(zhǔn):使用相對誤差、均方根誤差(RMSE)和相對均方根誤差(RMSE_rela)衡量標(biāo)定精度,使用標(biāo)準(zhǔn)化估計誤差平方(Normalized Estimation ErrorSquared,NEES)衡量濾波一致性。一致性是為了描述濾波器給出的P陣是否能夠準(zhǔn)確描述狀態(tài)估值的不確定性,通過狀態(tài)估值的概率分布函數(shù)來定義。假設(shè)k時刻的狀態(tài)參數(shù)估計誤差VXk和對應(yīng)的協(xié)方差矩陣為∑Xk,定義NESS=VXk∑-1XKCVTXb,若濾波結(jié)果一致,并為近似線性高斯,則NESS滿足X2分布,可通過假設(shè)檢驗的方法檢驗濾波結(jié)果是否一致,若檢驗結(jié)果為1,表示一致性好,0表示一致性差。
2.1含有色噪聲模型下的濾波方法試驗分析
2.1.1參數(shù)設(shè)置
擴(kuò)維KF(狀態(tài)和量測擴(kuò)維KF)狀態(tài)參數(shù)設(shè)置為:加計零位方差1×l0-5g,隨機(jī)游走10ug√Hz;陀螺零偏方差0.01(°)m,一階馬爾可夫相關(guān)時間為1s,均方值0.0001((°)/h2,角度隨機(jī)游走系數(shù)0.00015/√h,其他參數(shù)設(shè)置同KF。
擴(kuò)維KF量測參數(shù)設(shè)置為:量測噪聲為一階馬爾可夫過程,相關(guān)時間為ls;轉(zhuǎn)臺誤差標(biāo)準(zhǔn)差:位置O.Olm2,速度0.0001(m/s)2,角度100(")2,其他參數(shù)設(shè)置同KF。
擴(kuò)維KF的參數(shù)設(shè)置是將上述兩種算法的參數(shù)設(shè)置結(jié)合。H無窮算法的參數(shù)設(shè)置同狀態(tài)和量測擴(kuò)維KF。
2.1.2仿真試驗
首先采用KF和狀態(tài)擴(kuò)維卡爾曼濾波對系統(tǒng)噪聲是有色噪聲的慣導(dǎo)誤差模型參數(shù)進(jìn)行標(biāo)定,為防止濾波發(fā)散,設(shè)置系統(tǒng)噪聲方差陣為高斯白噪聲方差陣和一階馬爾可夫過程均方值之和;其次對量測噪聲是有色噪聲模型的量測擴(kuò)維卡爾曼濾波與卡爾曼濾波結(jié)果進(jìn)行對比;最后對系統(tǒng)噪聲和量測噪聲都是有色噪聲時的濾波結(jié)果與卡爾曼濾波結(jié)果進(jìn)行對比。由于篇幅限制,這里僅列出系統(tǒng)和量測噪聲均為有色噪聲時的濾波結(jié)果,如圖2所示。H無窮中θ設(shè)置為0.2,KF與H無窮濾波結(jié)果對比如圖3所示。擴(kuò)維KF與H無窮算法的精度對比如圖4所示。
以KF、擴(kuò)維KF為例分析算法與模型匹配的重要性。采用真實的誤差傳播方程得到狀態(tài)真值,再分別采用KF和擴(kuò)維KF來實現(xiàn)參數(shù)標(biāo)定,蒙特卡羅仿真結(jié)束時,濾波估計誤差以及濾波給出的理論3σ(其中σ為噪聲標(biāo)準(zhǔn)差)邊界圖如圖5、圖6所示,其中3σ值由濾波結(jié)束時的誤差協(xié)方差陣給出的狀態(tài)誤差方差值得到,圖中用兩條直線表示,黑點(diǎn)為每次仿真結(jié)束時的誤差點(diǎn)。若誤差點(diǎn)落在3σ邊界線之間,則說明濾波算法與真實模型匹配,否則不匹配。表1和表2中列出了KF和擴(kuò)維KF的其他指標(biāo)對比(這里僅列出x軸),NEES表示算法的一致性。0表示一致性差,1表示一致性好,說明濾波算法與慣導(dǎo)誤差模型類型一致。
從圖4可以看出,同時采用狀態(tài)擴(kuò)維和量測擴(kuò)維法可有效實現(xiàn)狀態(tài)噪聲和量測噪聲為有色噪聲時的最優(yōu)濾波,與卡爾曼濾波相比,估計精度有所提高。
由于一階馬爾可夫有色噪聲被認(rèn)為是介于高斯白噪聲和隨機(jī)常值之間的一種噪聲,相關(guān)時間分別為采樣時間和無窮大。實際建模中,是否需要針對一階馬爾可夫單獨(dú)建模以及建模后能否估計出來,這與相關(guān)時間及慣導(dǎo)工作時間有關(guān)系。
因此,在工程上可遵循以下建議:
(1)若相關(guān)時間很短(采樣時間的10倍以內(nèi)),可直接將一階馬爾可夫噪聲等價為高斯白噪聲,不必單獨(dú)建模,即使單獨(dú)建模,也不易與高斯白噪聲分離開。
(2)若相關(guān)時間較長(大于采樣時間的50倍),且慣導(dǎo)工作時間小于相關(guān)時間,n倍(n一般大于10),可針對一階馬爾科夫噪聲單獨(dú)建模,但此種情況下,隨機(jī)常值和一階馬爾可夫不易分離,只能估計出兩者之和。
(3)若相關(guān)時間較長(大于采樣時間的50倍),且慣導(dǎo)工作時間大于相關(guān)時間n倍(n一般大于100),必須對一階馬爾可夫噪聲單獨(dú)建模,此時,隨機(jī)常值和一階馬爾可夫易分離,采用狀態(tài)擴(kuò)維或量測擴(kuò)維法可比較準(zhǔn)確地估計出隨機(jī)常值和一階馬爾可夫噪聲。
(4)若相關(guān)時間特別長,遠(yuǎn)大于采樣時間和慣導(dǎo)工作時間,可直接將一階馬爾可夫噪聲等價為隨機(jī)常值,不必單獨(dú)建模,即使單獨(dú)建模,也不易與隨機(jī)常值分離開來。
由圖5可看出,H無窮濾波估計精度較高,當(dāng)θ為0.2時,與直接采用卡爾曼濾波相比,精度稍有提高。但在濾波環(huán)境很差、系統(tǒng)噪聲和量測噪聲沒有很明顯的規(guī)律可循時,可使用H無窮濾波,并通過參數(shù)的調(diào)整自適應(yīng)改變?yōu)V波的精度和魯棒性。因此,從工程應(yīng)用角度考慮,若系統(tǒng)滿足標(biāo)準(zhǔn)卡爾曼濾波條件,濾波環(huán)境較好時可直接采用卡爾曼濾波,若濾波環(huán)境較差,采用H無窮濾波能保證性能較穩(wěn)定,不易發(fā)散,但在精度方面會有一定的損失。
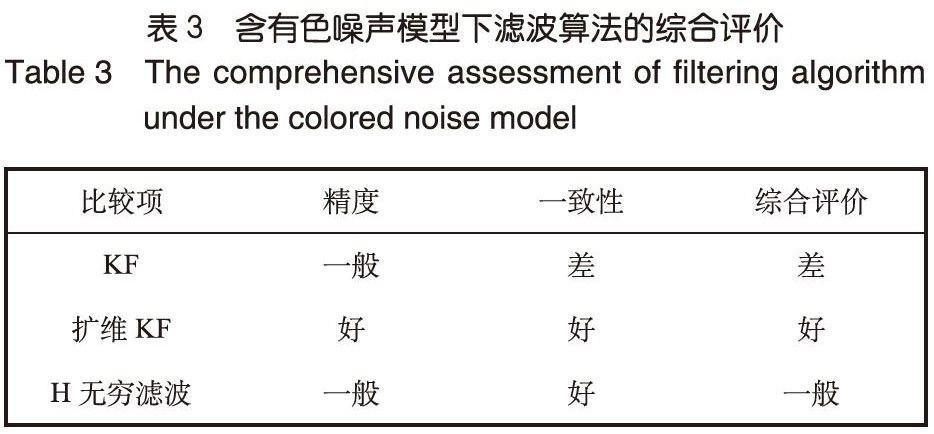
通過對比表1和表2中的參數(shù)精度,可以看出,在含有色噪聲的模型中,擴(kuò)展KF的濾波精度比KF高;NEES顯示擴(kuò)展KF一致性好,KF一致性差,說明擴(kuò)展KF與含有色噪聲的誤差模型匹配。
為此,含有色噪聲模型下濾波算法綜合評價見表3,分為好、一般、差三個等級。
2.2噪聲統(tǒng)計特性時變?yōu)V波方法試驗分析
2.2.1參數(shù)設(shè)置
Sage-Husa自適應(yīng)濾波的參數(shù)設(shè)置與KF相同;改進(jìn)的自適應(yīng)濾波采用線性系統(tǒng)模型,參數(shù)設(shè)置同KF。由于實際中的噪聲變化規(guī)律不能得到,所以對初始系統(tǒng)噪聲標(biāo)準(zhǔn)差假設(shè)三種變化規(guī)律:正弦變化、線性變化和指數(shù)變化。其中,系統(tǒng)噪聲標(biāo)準(zhǔn)差為正弦變化和線性變化時,設(shè)置自適應(yīng)濾波的遺忘因子為0.85;系統(tǒng)噪聲標(biāo)準(zhǔn)差為指數(shù)變化時,設(shè)置自適應(yīng)濾波的遺忘因子為0.7。
2.2.2仿真試驗
對漸消記憶指數(shù)加權(quán)Sage-Husa自適應(yīng)濾波的100次蒙特卡羅仿真中,兩次發(fā)散,對其他98次統(tǒng)計,結(jié)果見表4。對改進(jìn)的自適應(yīng)濾波算法的仿真試驗結(jié)果如圖7所示。
從表7可看出,采用改進(jìn)Sage-Husa自適應(yīng)濾波方法誤差較大,并不能達(dá)到預(yù)想的效果。分析原因,這是因為改進(jìn)Sage-Husa自適應(yīng)濾波存在噪聲統(tǒng)計特性估計和狀態(tài)估計之間耦合性太強(qiáng)。初始條件下,噪聲統(tǒng)計特性估計不準(zhǔn)確,就很大程度影響了狀態(tài)估計的準(zhǔn)確性,進(jìn)而相互影響,導(dǎo)致估計結(jié)果惡化或濾波發(fā)散。因此,在實際慣導(dǎo)誤差模型參數(shù)標(biāo)定過程中,改進(jìn)Sage-Husa自適應(yīng)濾波效果不理想。
從圖9 (a)可以看出,當(dāng)初始系統(tǒng)噪聲標(biāo)準(zhǔn)差滿足正弦變化時,采用自適應(yīng)濾波的標(biāo)定結(jié)果相比于卡爾曼濾波精度較高。從圖9 (b)可以看出,當(dāng)初始系統(tǒng)噪聲標(biāo)準(zhǔn)差滿足線性變化時,采用自適應(yīng)濾波的標(biāo)定結(jié)果相比于卡爾曼濾波精度較高。從圖9 (c)可以看出,當(dāng)初始系統(tǒng)噪聲標(biāo)準(zhǔn)差滿足指數(shù)變化時,采用自適應(yīng)濾波的標(biāo)定結(jié)果相比于卡爾曼濾波精度較高。
這是因為自適應(yīng)濾波利用了噪聲濾波器和平滑器作為噪聲統(tǒng)計估計器。因此,在實際工程應(yīng)用中,若未知系統(tǒng)和量測噪聲統(tǒng)計特性,不能采用卡爾曼濾波時,可采用改進(jìn)自適應(yīng)濾波方法以達(dá)到相對較高的估計精度。
噪聲統(tǒng)計特性未知或時變模型下濾波算法綜合評價簡述見表5。
3結(jié)束語
本文研究了慣性導(dǎo)航系統(tǒng)誤差模型標(biāo)定中不同的濾波方法。首先對不同條件下的濾波算法進(jìn)行理論分析與總結(jié),進(jìn)而通過仿真驗證多種濾波算法在慣導(dǎo)誤差模型標(biāo)定中的有效性及其適用條件,得出算法的應(yīng)用建議,為慣導(dǎo)誤差模型標(biāo)定濾波方法選擇提供了一定的工程應(yīng)用指導(dǎo),這對提高慣導(dǎo)誤差模型標(biāo)定精度具有較強(qiáng)的借鑒意義。