自適應旋翼性能研究進展
2018-04-27 09:52:00韓東董晨魏武雷桑玉委
航空學報 2018年4期
關鍵詞:研究
韓東,董晨,魏武雷,桑玉委
南京航空航天大學 直升機旋翼動力學國家級重點實驗室,南京 210016
由于直升機能在狹小范圍內垂直起降并具有良好的低空、低速以及機動性能,因此,其在抗震救災、海上急救、消防、資源探測等民用方面以及偵查、跟蹤、監視、攻擊、運輸等軍事方面用途廣泛。航時、航程、速度和升限等性能指標不高一直是困擾直升機界的一個難題。前行槳葉激波和后行槳葉失速是導致直升機飛行性能指標相對不高的關鍵因素。Sikorsky早就指出[1],直升機本質上并不是一種高速、高升限或者大航程飛行器。自從直升機誕生之日起,提升直升機的飛行效率、速度、航時、航程和升限等性能指標一直是直升機領域研究中的重中之重。
旋翼被動設計,比如:旋翼槳葉翼型氣動特性及分布的優化,槳葉負扭轉的優化,新型槳尖的設計,旋翼直徑、轉速和弦長等參數的選擇等[1-7],在提升旋翼性能方面已經取得了顯著的成效。被動旋翼可在某個或者局部飛行狀態獲得較優飛行性能,隨著直升機飛行環境或者飛行狀態的改變,旋翼偏離較優工作狀態,飛行性能隨之下降。比如,采用較大槳葉負扭轉的旋翼可獲得較好的懸停性能,但采用較小的槳葉負扭轉有利于高速飛行;再如旋翼轉速,懸停時采用較低轉速可降低旋翼需用功率,前飛速度較大時,需采用較高的旋翼轉速。旋翼被動設計實際上是參數設計的折中,直升機在整個飛行包線內難以發揮最佳的飛行性能。
自適應旋翼技術最大的優勢是能根據飛行狀態的變化,優化旋翼參數,進而提升旋翼升阻比L/D,以適應不同飛行狀態和環境的需要,最大限度地提升旋翼性能。從功率節省方面來看,自適應旋翼主要減少旋翼誘導功率和/或旋翼型阻功率,達到節省旋翼需用功率的目的。本文主要探討自適應旋翼技術在降低旋翼需用功率、提升直升機飛行性能方面的研究進展,為自適應旋翼技術發展提供方向性參考。
1 自適應旋翼分類
自適應旋翼(Adaptive Rotor)也被稱為主動旋翼(Active Rotor)、智能旋翼(Smart Rotor)或者變體旋翼(Morphing Rotor)。狹義上來講,自適應旋翼包括旋翼總體參數變化對應自適應旋翼構型,比如變轉速旋翼、變直徑旋翼等,而廣義上來講,自適應旋翼還包括槳葉參數變化對應自適應旋翼構型,比如智能槳尖、槳葉變弦長和翼型變彎度等廣義自適應旋翼。根據參數變化的范圍,本文將自適應旋翼分為旋翼整體參數控制和單片槳葉參數控制,如圖1。旋翼整體參數控制主要是指自適應旋翼改變整副旋翼的參數,比如旋翼操縱量、旋翼轉速和旋翼直徑等。單片槳葉控制主要是指自適應旋翼改變單片槳葉參數,比如槳葉翼型參數、槳葉槳距、槳葉扭轉角分布和槳尖參數等,這些參數會根據飛行狀態或者環境的不同而進行自我優化,達到提升旋翼性能的目的。翼型參數變化(翼型變體)又包括前緣縫翼、合成射流、后緣襟翼、格尼襟翼、變弦長和翼型變彎度等。
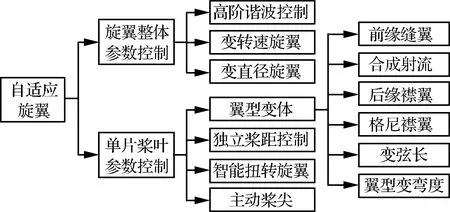
圖1 自適應旋翼的分類Fig.1 Classification of adaptive rotors
2 國外研究進展
2.1 變轉速旋翼
Karem最早提出最優轉速旋翼(Optimum Speed Rotor, OSR)技術[8]。飛行過程中,通過改變旋翼轉速,優化旋翼升阻比、降低旋翼需用功率,來提升直升機航時、航程、升限和效率等飛行性能指標。該專利給出了不同起飛重量(635、1 179和1 814 kg)時,最優轉速和常轉速旋翼直升機需用功率,如圖2~圖4所示[8]。起飛重量較小時,優化旋翼轉速可顯著降低旋翼需用功率,隨著起飛重量的增加,優化旋翼轉速所帶來的功率節省相對較小。旋翼最優轉速隨前飛速度增加而增大。起飛重量為1 179 kg時,60 kn速度飛行時,優化旋翼轉速可降低45%的需用功率、增加82%的航時;80 kn速度飛行時,優化旋翼轉速可降低38%的需用功率、增加61%的航程。最優轉速旋翼更加適合于直升機在較低前飛速度和較小負載飛行時提升旋翼性能。
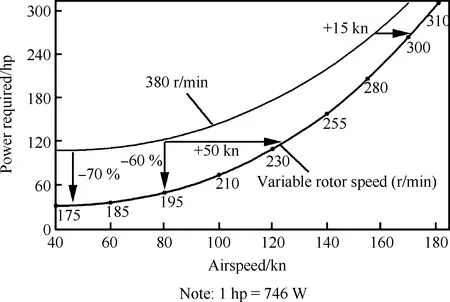
圖2 起飛重量為635 kg時在海平面需用功率[8]Fig.2 Power required for takeoff weight 635 kg at sea level [8]
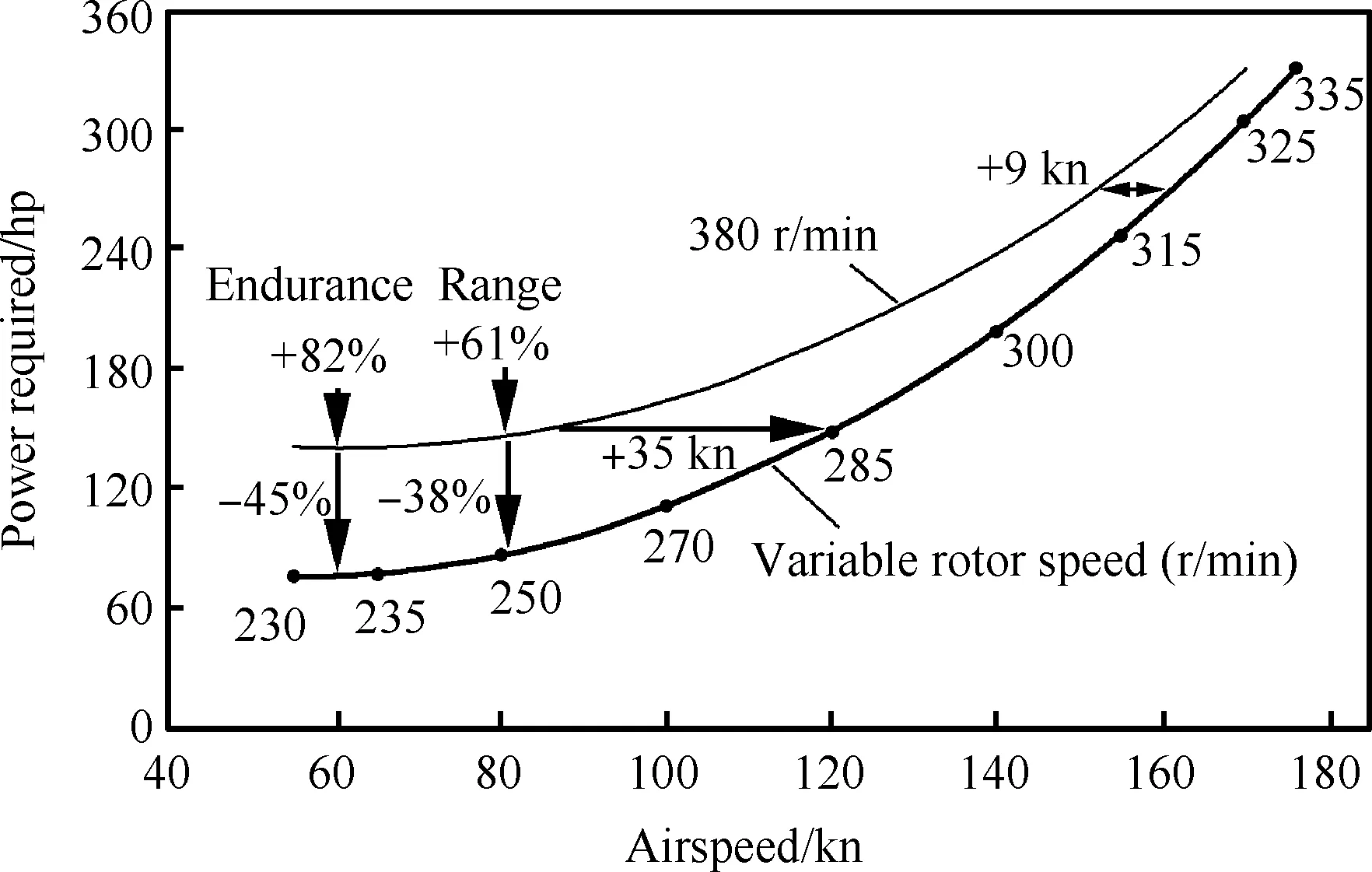
圖3 起飛重量為1 179 kg時在海平面需用功率[8]Fig.3 Power required for takeoff weight 1 179 kg at sea level[8]
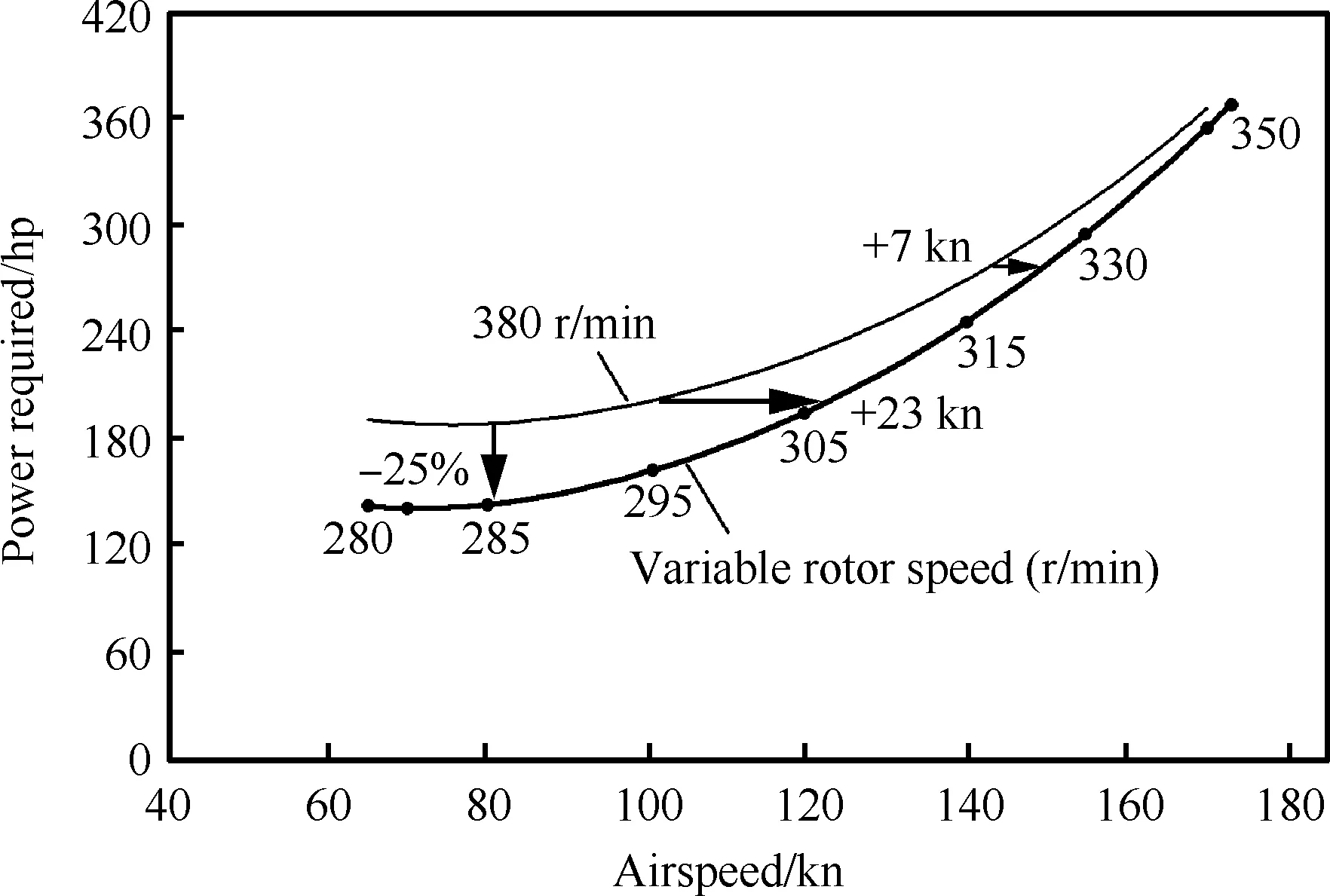
圖4 起飛重量為1 814 kg時在海平面需用功率[8]Fig.4 Power required for takeoff weight 1 814 kg at sea level[8]
Prouty從直升機懸停效率、航時、航程和最大飛行速度等方面闡述了旋翼變轉速技術的優勢[9]。該文考慮了發動機特性對旋翼轉速優化的影響,旋翼需用功率最小并不意味著發動機油耗最低,因為兩者對應的最優轉速很可能不一致,雖然該文采用的分析模型比較簡單,但該研究內容非常重要。常規直升機較少采用旋翼變轉速技術,主要還是由于振動問題,尤其是接近共振轉速時的共振問題。分析表明,旋翼變轉速技術不僅可用于提升直升機懸停性能,還可以提升其航時、航程和最大飛行速度等性能。
Steiner等研究了旋翼轉速變化對直升機性能和配平的影響[10],采用較為經典的方法預測直升機飛行性能。以UH-60直升機為算例的分析表明,旋翼轉速降低,旋翼總距和縱向周期變距增大;旋翼轉速降低,槳葉所受離心力減小,槳葉預錐角隨之增大;其他配平量,比如機體俯仰和滾轉姿態角、槳葉周期揮舞以及尾槳拉力等隨旋翼轉速變化不明顯。降低旋翼轉速帶來旋翼需用功率節省主要源于旋翼型阻功率的降低,而轉速變化對旋翼誘導功率的影響小很多。旋翼轉速降低會伴隨旋翼扭矩的增大,隨飛行速度增加,扭矩增大幅值減小。Steiner等也指出,旋翼轉速變化會帶來一些潛在問題:① 旋翼轉速變化,旋翼傳給機體的激振載荷頻率隨之改變,該激振頻率有可能會接近機體固有頻率,從而引起機體振動水平的增加;② 旋翼轉速降低,旋翼動能隨之減小,給直升機自轉特性帶來負面影響,進而影響直升機安全性;③ 旋翼轉速降低,旋翼需增大槳距角以提供足夠拉力,槳距角增大帶來失速區擴大,旋翼產生更大拉力的潛力降低,直升機機動性能降低;④ 旋翼轉速降低,槳葉離心力減小,直升機更易于受陣風的影響。
DiOttavio和Friedmann以A160T無人直升機為背景[11],探討了寬范圍變化的旋翼轉速在旋翼性能提升方面的優勢。A160T無人直升機的旋翼轉速可降低至其基準值的60%,尚未達到專利技術中的40%[8]。飛行實測結果與理論預測吻合較好,說明最優轉速旋翼技術可用于提升直升機航時、航程、升限和效率等性能指標,以及降低發動機燃油消耗。試驗也表明,A160T無人直升機的旋翼明顯比許多其他類型直升機的旋翼安靜,即噪聲水平更低。從該方面研究可看出,旋翼變轉速技術已可應用于工程實踐。
改變旋翼轉速一般有兩種途徑:主減速器改變傳動比或者發動機控制出軸轉速。如通過調節發動機轉速來實現旋翼變轉速,旋翼與發動機聯動,旋翼轉速變化帶來發動機出軸轉速變化,進而影響發動機的耗油特性,事實上發動機燃油消耗降低才意味著直升機需用功率下降。

圖5 常轉速與最優轉速時需用功率對比[12]Fig.5 Comparison of power required at constant and optimal speeds[12]
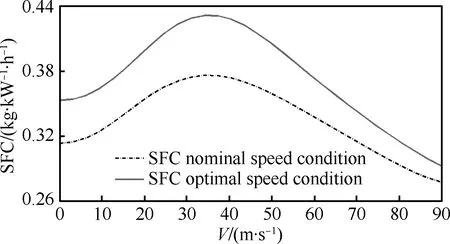
圖6 常轉速與最優轉速時發動機耗油率對比[12]Fig.6 Comparison of engine fuel consumption rate at constant and optimal speeds[12]
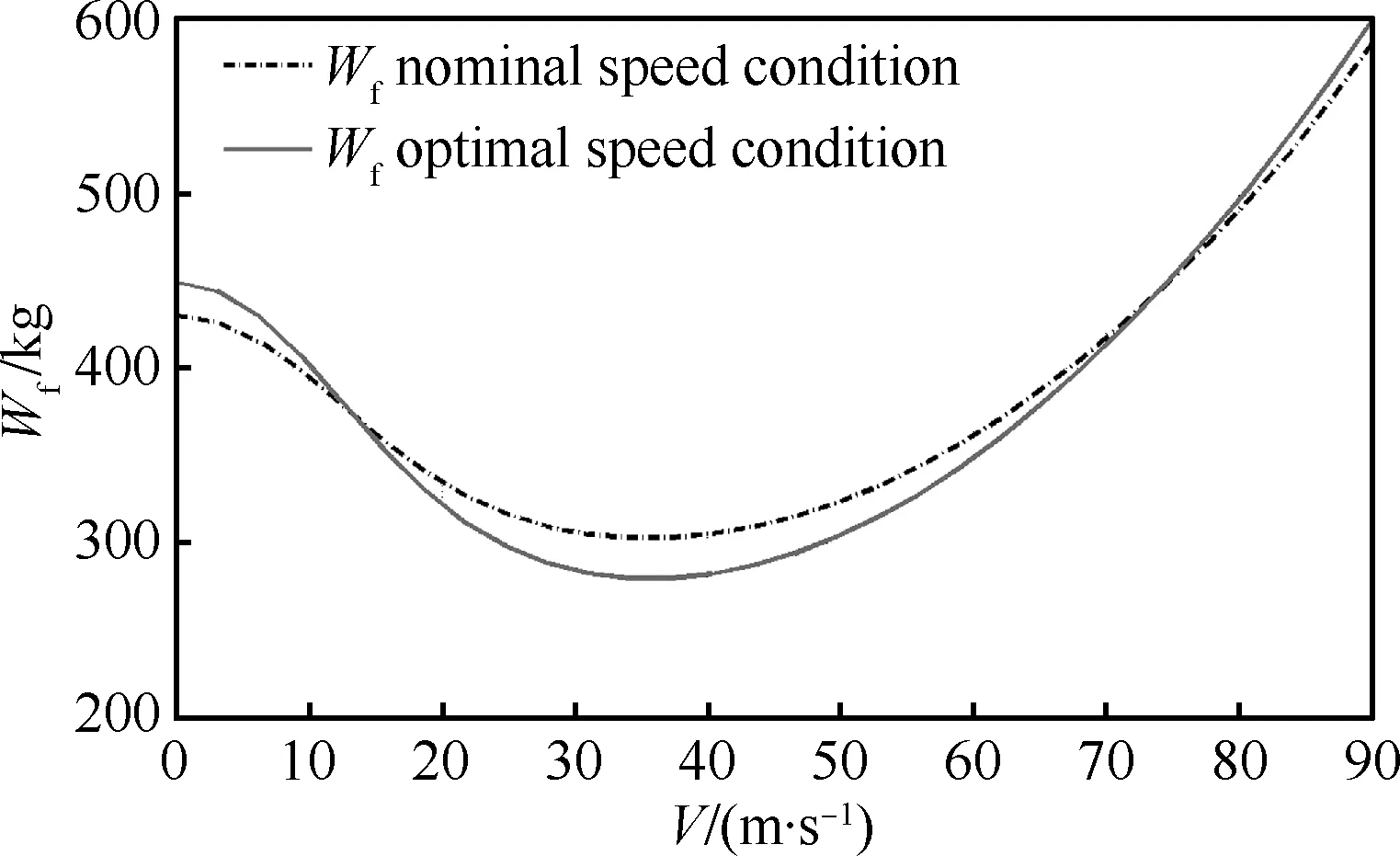
圖7 常轉速與最優轉速時發動機單位時間油耗對比[12]Fig.7 Comparison of engine unit time fuel consumption at constant speed and optimal speeds[12]
Garavello和Benini在采用旋翼變轉速技術提升直升機性能的研究中考慮了發動機出軸轉速變化對其耗油特性的影響[12]。該文以UH-60A直升機為算例進行分析,旋翼最優轉速根據槳葉最優載荷范圍來確定,由于缺少UH-60A直升機旋翼槳葉載荷數據,該文采用文獻[8, 11]中最優旋翼槳葉載荷數據。起飛重量為7 257 kg、飛行高度為500 m、不同飛行速度時,需用功率P、耗油率(SFC)和單位時間油耗Wf對比如圖5~圖7所示[12]。很明顯,優化旋翼轉速有助于降低直升機需用功率,但當發動機轉速偏離額定轉速時,發動機耗油率增加明顯,導致直升機低速和高速飛行時,發動機油耗增加,優化旋翼轉速不僅沒有達到降低發動機耗油率的效果,反而使其增加。該研究的重要意義在于,說明了旋翼需用功率最小并不意味著發動機耗油最省,在優化旋翼轉速提升旋翼性能時,需通盤考慮出軸轉速對發動機耗油特性的影響。
基于上述研究,Misté和Benini以發動機油耗最小為目標優化旋翼轉速[13],考慮了轉速變化對發動機耗油特性的影響,采用經典性能預測方法分析了旋翼轉速對UH-60直升機需用功率的影響。飛行高度為500 m、起飛重量為7 257 kg時,發動機燃油消耗減少百分比隨前飛速度變化如圖8所示。很明顯,以發動機耗油率最小為目標時,同樣可通過優化旋翼轉速降低懸停和大速度前飛時直升機燃油消耗。
為進一步研究發動機耗油特性對旋翼最優轉速的影響[14],Misté等綜合旋翼和發動機性能,以發動機油耗最小為目標優化旋翼轉速,在原有研究的基礎上[12-13],以葉素和動量理論為基礎,采用翼型二維數據查表的方法計算翼型氣動特性,考慮前行槳葉壓縮性和后行槳葉失速的影響,探討旋翼轉速對發動機油耗的影響。圖9給出了以旋翼需用功率最小為目標(Main rotor power optimum)和以燃油消耗最小為目標(Global optimum)時,發動機燃油消耗隨前飛速度變化曲線[14]。懸停和小速度時,兩者差異非常明顯,如果以旋翼需用功率最小為目標,反而會帶來發動機燃油消耗的增加,而以燃油消耗最小為目標時,卻可以節省燃油,隨著前飛速度的增加,兩者的效果非常接近。
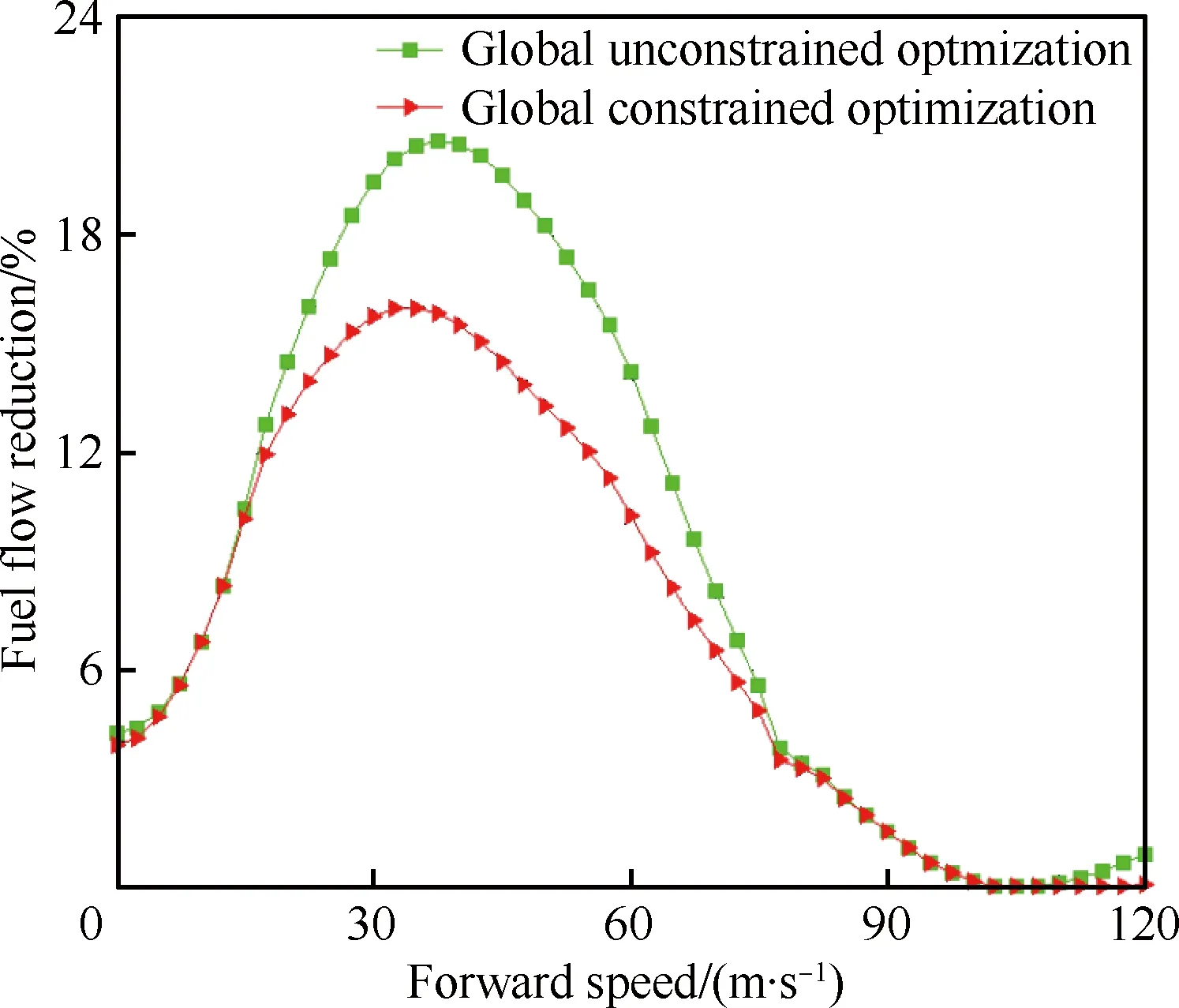
圖8 燃油消耗率隨前飛速度變化曲線[13]Fig.8 Fuel consumption with forward speed[13]
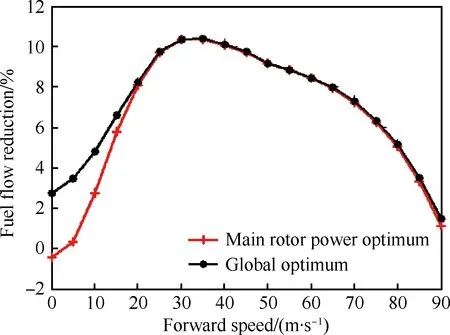
圖9 不同優化目標時燃油消耗隨前飛速度變化曲線[14]Fig.9 Fuel consumption with forward speed with different optimization targets[14]
Mistry和Gandhi以類似UH-60A直升機為研究對象[15],采用經典性能預測方法分析了旋翼轉速變化對直升機需用功率的影響。旋翼轉速變化被限定在±11%額定轉速范圍內,海平面巡航飛行時,旋翼需用功率節省最多大于14%。降低旋翼轉速能較為有效地降低巡航小負載時需用功率。較高飛行高度,或較大前飛速度和起飛重量時,由于失速的影響,功率節省效果變差。速度較小時,功率節省效果也變差。文中研究內容與文獻[10]類似,在此不再贅述。
為進一步提升變轉速旋翼性能,Han等將槳葉變扭轉技術應用于變轉速旋翼[16]。圖10給出旋翼變轉速、槳葉變扭轉以及兩者共同作用時,旋翼需用功率節省的最大值[16]。整體上來看,旋翼變轉速技術所取得的功率節省優于槳葉變扭轉技術。隨著前飛速度增加,槳葉變扭轉提升變轉速旋翼性能的效果越來越明顯,兩者共同作用時節省功率的效果優于單獨作用效果,大速度時,提升效果有減小趨勢。
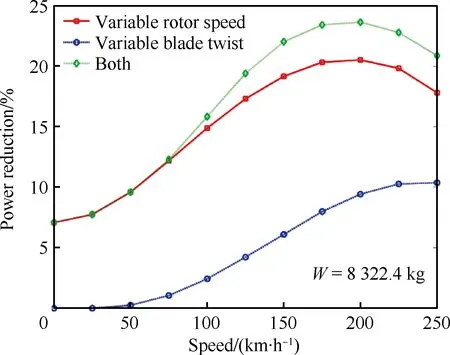
圖10 不同方法功率節省值對比[16]Fig.10 Comparison of power saving with different methods[16]
旋翼變轉速技術已在歐洲藍色直升機(Bluecopter)驗證機上得到應用,是該直升機提升飛行性能和降低噪聲水平的關鍵技術之一。旋翼變轉速技術也是高速直升機的支撐技術,比如,美國西科斯基公司的X-2共軸高速直升機驗證機,前飛時旋翼轉速降低20%以減小空氣壓縮性影響,從而提高最大飛行速度。由于本文是圍繞自適應旋翼在飛行性能(效率)提升方面的研究綜述,因此在高速直升機和低噪聲直升機上的應用不在此贅述。
旋翼轉速變化,旋翼激振頻率變化,旋翼槳葉揮舞、擺振和扭轉頻率比變化,這可能會導致嚴重的槳葉固有頻率與激振頻率共振問題。隨著轉速降低,旋翼左右氣流不對稱會惡化旋翼載荷狀況。當然不僅是動力學問題,旋翼變轉速系統也會帶來相關的重量代價、可靠性以及飛行品質等問題。目前,2轉速旋翼已經在某些直升機上得到應用,更多轉速旋翼尚未見在直升機型號中得到應用。
2.2 變直徑旋翼
槳盤載荷較小有利于提升旋翼懸停性能,但會降低直升機高速前飛性能。為提升復合式直升機、停轉翼飛行器和傾轉旋翼飛行器高速飛行性能,20世紀60年代,研究人員提出了旋翼變直徑概念[17],懸停和小速度時采用較大旋翼直徑,高速前飛時減小旋翼直徑,從而兼顧懸停和高速性能。
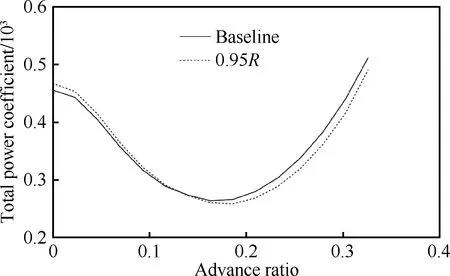
圖11 不同旋翼直徑需用功率對比[18]Fig.11 Comparison of power required of rotors with different diameters[18]
為對比多種構型自適應旋翼提升旋翼性能的效果,Kang等分析了旋翼直徑R對需用功率的影響,如圖11所示[18]。懸停和小速度時,旋翼誘導功率占主導,增大槳盤面積有利于降低誘導功率,雖然旋翼型阻功率增加,但增加幅值小于誘導功率的節省,從而帶來總功率的降低,而中等到大速度飛行時,旋翼型阻功率節省占主導,采用較小直徑旋翼有利于降低需用功率。
Mistry和Gandhi采用類似UH-60A直升機參數的通用直升機為算例[19],進一步探討了不同飛行環境時旋翼直徑變化對旋翼性能的提升效果。分析指出,隨著飛行高度的增大,直升機所能達到的最大飛行速度減小,但優化旋翼直徑所能帶來的功率節省效果越來越好;低速和高速前飛時,優化旋翼直徑能帶來更多的直升機功率節省,而中等速度飛行(巡航)時,優化旋翼直徑所能帶來的功率節省較小,尤其是低海拔飛行時,功率節省非常小。
由于實現難度太大,旋翼變直徑技術尚未在直升機上應用,相關研究很少。
2.3 獨立槳距控制旋翼
高階諧波控制(Higher Harmonic Control, HHC)最早被應用于直升機旋翼振動主動控制,由于其在不旋轉坐標系中,如圖12所示[20],作動頻率轉換到旋轉坐標系中就變為Nb-1、Nb和Nb+1階(Nb為槳葉片數)。對于4片槳葉旋翼,輸入頻率可為3、4、5階,缺少2階輸入,難以在提升旋翼性能和降低噪聲等方面得到應用。隨后提出了基于槳距控制的獨立槳葉控制(Individual Blade Control,IBC)[20],以克服輸入頻率的制約。獨立槳距控制的輸入位于旋轉坐標系內,可以給單片槳葉提供不同階次和不同幅值的槳距輸入,如圖12所示。
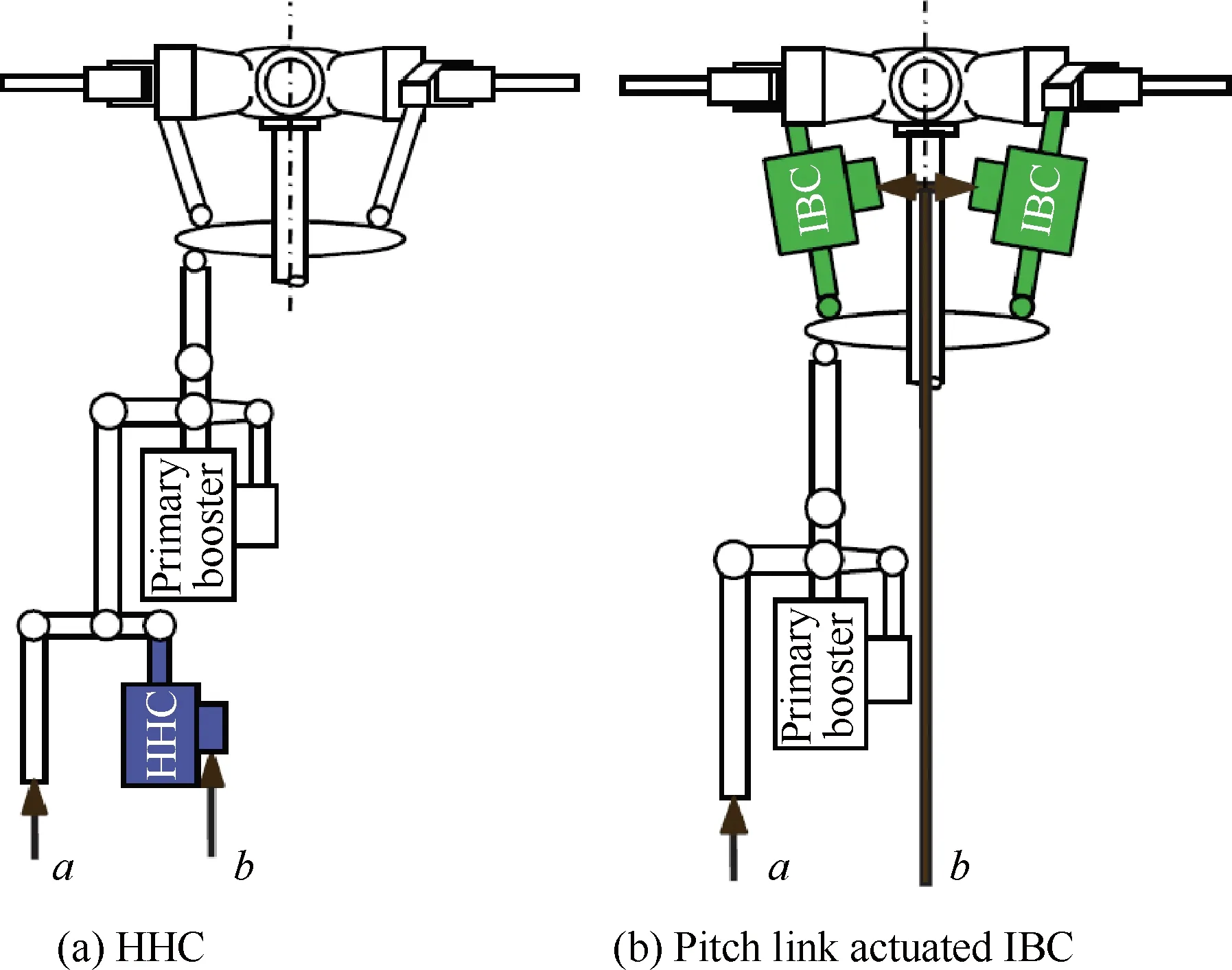
圖12 高階諧波控制和獨立槳距控制示意圖[20] Fig.12 Configuration of Higher Harmonic Control (HHC) and Individual Blade Control (IBC)[20]
20世紀50年代,研究人員就試圖將高階諧波槳距控制用于直升機旋翼[21]。Arcidiacono將高階諧波槳距控制用于延緩失速、提升直升機最大飛行速度[22],分析表明,典型常規直升機采用2階槳距控制,最大飛行速度可增加約25%,如采用2階加3階輸入,最大飛行速度可增加約30%。
波音公司的Shaw等通過風洞試驗研究了2階槳距對旋翼性能的提升[23],試驗采用3片槳葉CH-47D支努干直升機模型旋翼,自動傾斜器產生高階諧波輸入,試驗結果證實了2階諧波控制可用于提升高速飛行時的旋翼性能,速度為135 kn時,旋翼需用功率節省6%,速度為160 kn時,需用功率節省4%,對應諧波輸入均為2°。

為了探討獨立槳距控制對直升機槳渦干擾噪聲、振動和功率消耗等的影響,NASA聯合多家單位在其低速風洞中進行了基于BO-105直升機旋翼的獨立槳距控制系統試驗[25-26],測試結果表明,高速前飛時,2階槳距輸入最多可降低7%的旋翼需用功率,速度較低時,未觀察到功率節省。試驗表明獨立槳距控制更適宜于降低高速飛行時旋翼需用功率。
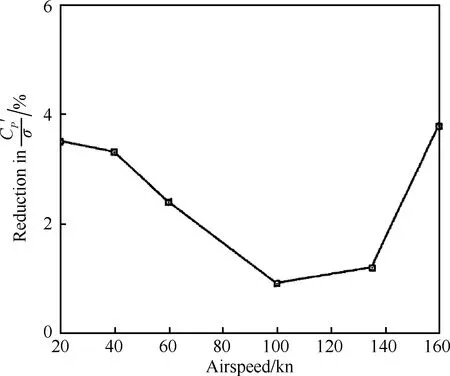
圖13 旋翼性能提升隨飛行速度變化關系[24]Fig.13 Rotor performance improvement vs forward speed[24]
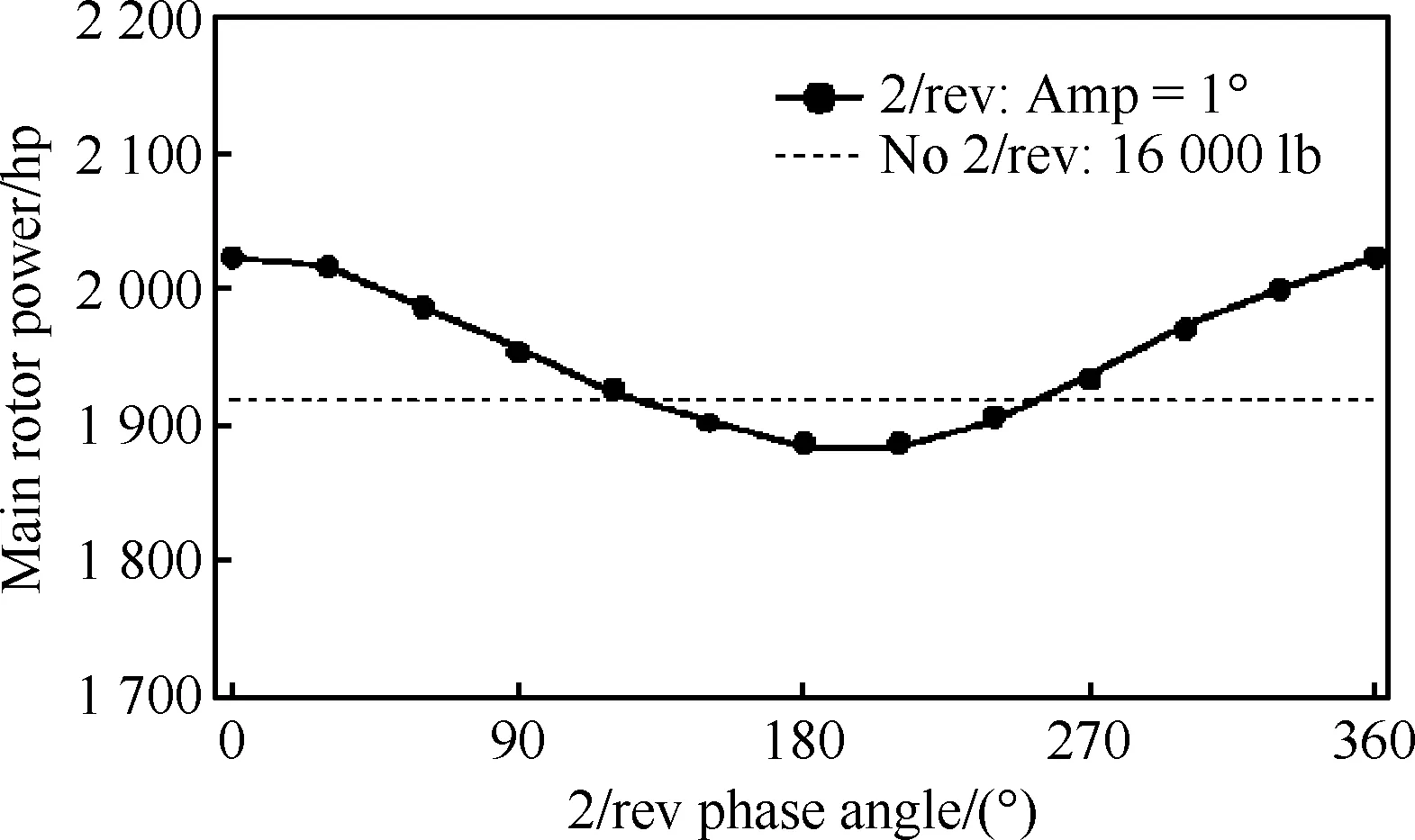
圖14 起飛重量為16 000 lb時旋翼功率隨2階 輸入相位角變化曲線[27]Fig.14 Rotor power vs phase angle of 2P input with takeoff weight 16 000 lb[27]
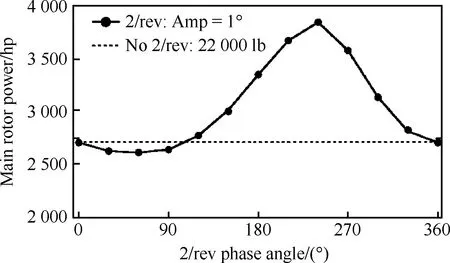
圖15 起飛重量為22 000 lb時旋翼功率隨2階 輸入相位角變化曲線[27]Fig.15 Rotor power vs phase angle of 2P input with takeoff weight 22 000 lb[27]
Cheng等通過分析2階諧波槳距控制對旋翼性能的影響[27],揭示了阻力系數分布發生變化是導致功率節省的物理機理。圖14給出起飛重量為16 000 lb(1 lb=0.453 59 kg)時,旋翼功率隨2階輸入相位角變化曲線[27],前進比為0.3、輸入幅值為1°、相位角為210°時功率節省最多, 2階輸入增加了槳葉前行側迎角,減少了前行側槳尖型阻峰值。圖15給出起飛重量為22 000 lb時旋翼功率隨2階輸入相位角變化曲線,前進比為0.3、輸入幅值為1°、相位角為60°時功率節省最多, 2階輸入降低了后行側槳葉迎角,進而減少了失速區。
隨后,Cheng和Celi運用優化算法和更為精細模型研究了最優2階槳距控制對旋翼性能的影響[28]。結果表明,優化算法得到的最優值與參數掃描所得結果非常接近。基于不同誘導速度模型預測的旋翼需用功率最小值對應相位角非常接近,但功率幅值有一定差距。同樣,基于剛性槳葉和柔性槳葉的最小功率預測,幅值差距較大,但對應相位角非常接近。
為驗證獨立槳距控制對旋翼性能提升以及振動、載荷和噪聲的控制效果,NASA Ames研究中心進行了獨立槳距控制的全尺寸UH-60A直升機旋翼性能和載荷風洞測試[29-30]。試驗配平了旋翼升力、前進力和槳轂滾轉力矩,槳軸前傾角固定。圖16給出前進比μ分別為0.35和0.40時旋翼需用功率測試值[30],當2階槳距輸入調節到適當相位角時,獨立槳距控制可用于降低旋翼需用功率,最佳相位角為225°、前進比為0.40時,1.5°和2.0°均可達到最大功率節省,前進比為0.35和0.40時,功率節省最大分別可達3.3%和5.0%,速度較大時功率節省更多。該試驗通過全尺寸旋翼試驗確認了獨立槳距控制用于提升旋翼性能的實際效果。
圖16 不同前飛速度時主旋翼功率測試值[30]Fig.16 Test data of main rotor power at different forward speeds[30]
經過約60年左右的發展,獨立槳距控制雖然在旋翼振動載荷和噪聲控制以及旋翼性能提升等方面展現出巨大的潛力,但該系統在復雜度、可靠性、有效性、系統重量、費用以及載荷承受能力等方面存在的問題[31],使得其仍尚未在直升機型號中得到應用。
2.4 智能扭轉旋翼
研究人員很早就認識到槳葉負扭轉可用于提升旋翼懸停和前飛性能[4,32]。負扭轉可優化旋翼升力分布,增大槳葉內側載荷,從而降低旋翼需用功率、提升旋翼性能。高速飛行時,槳葉負扭轉也可推遲槳葉失速和延緩槳尖壓縮性效應。制約智能扭轉旋翼工程實現的主要難題在于能否產生足夠大的槳葉扭轉角。20個世紀90年代,壓電材料開始應用于驅動槳葉扭轉[33-34],由于槳葉扭轉變形太小,難以應用于振動控制,更不用說旋翼性能提升。隨著主動纖維復合材料(Active Fiber Composite, AFC)和宏纖維復合材料(Marco Fiber Composite, MFC)的應用[35-40],槳葉主動扭轉角最大已可達4°[39],對于旋翼振動和噪聲控制已經足夠,有望應用于提升旋翼性能。
Zhang等采用弱CFD/CSD耦合方法[41],研究了槳葉主動扭轉用于Bo-105模型旋翼振動控制和性能提升,功率節省預估值高達14%,該值明顯過高估計了槳葉主動扭轉降低旋翼需用功率的能力,但該結果表明槳葉主動扭轉可用于提升旋翼性能。
Boyd, Jr.同樣采用弱CFD/CSD耦合方法研究了主動扭轉降低旋翼噪聲和提升旋翼性能[42]。槳葉主動扭轉3階輸入可同時降低中頻噪聲和4階垂向槳轂振動載荷,但會帶來源于型阻增加的旋翼升阻比的降低。
為對比多種自適應旋翼提升旋翼性能的效果,Kang等分析了不同扭轉角對旋翼誘導功率和型阻功率之和的影響,如圖17所示[18]。懸停和低速時,采用較大扭轉角可有效降低旋翼需用功率,隨著前飛速度的增大,減小負扭角有助于降低巡航和大速度時需用功率,但負扭角不宜太大。很明顯,采用適當負扭角,比如-9°,可兼顧較好的低速和高速性能,如采用智能扭轉旋翼,所取得的功率節省將會很小。該研究表明槳葉主動扭轉對旋翼性能的提升效果有限。
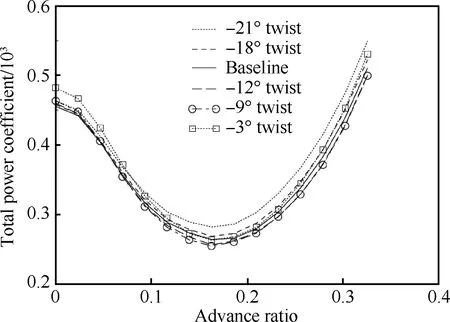
圖17 不同槳葉扭轉時總功率隨前進比變化曲線[18]Fig.17 Total power at different advance ratio with different blade twist[18]
為對比后緣變形、前緣變形和主動扭轉對旋翼性能的提升效果,Jain等采用基于升力線的性能預測模型和CFD/CSD耦合方法分析了高速(C8534)和大拉力飛行(C9017)狀態時,這些主動控制方法對旋翼性能的提升效果[43]。圖18給出高速時主動扭轉對旋翼升阻比影響(升力線模型),圖中橫坐標為輸入相位角φ,縱坐標為旋翼升阻比L/De的增量,1、2、3階諧波輸入時升阻比最多增大3.2%、3.1%、1.8%,4階諧波輸入時未見升阻比增大。CFD/CSD方法預測結果與升力線模型接近。升阻比的增大主要源于前行側槳尖負載荷區域阻力未增大情況下的升力額外增大。大拉力前飛時,并未見主動扭轉提升了旋翼升阻比。Jain等進而研究了主動扭轉同時提升旋翼性能和降低載荷的能力[44],高速前飛時,4°幅值的2階輸入可節省3.3%旋翼需用功率,同時減少了22%的槳轂垂向載荷。
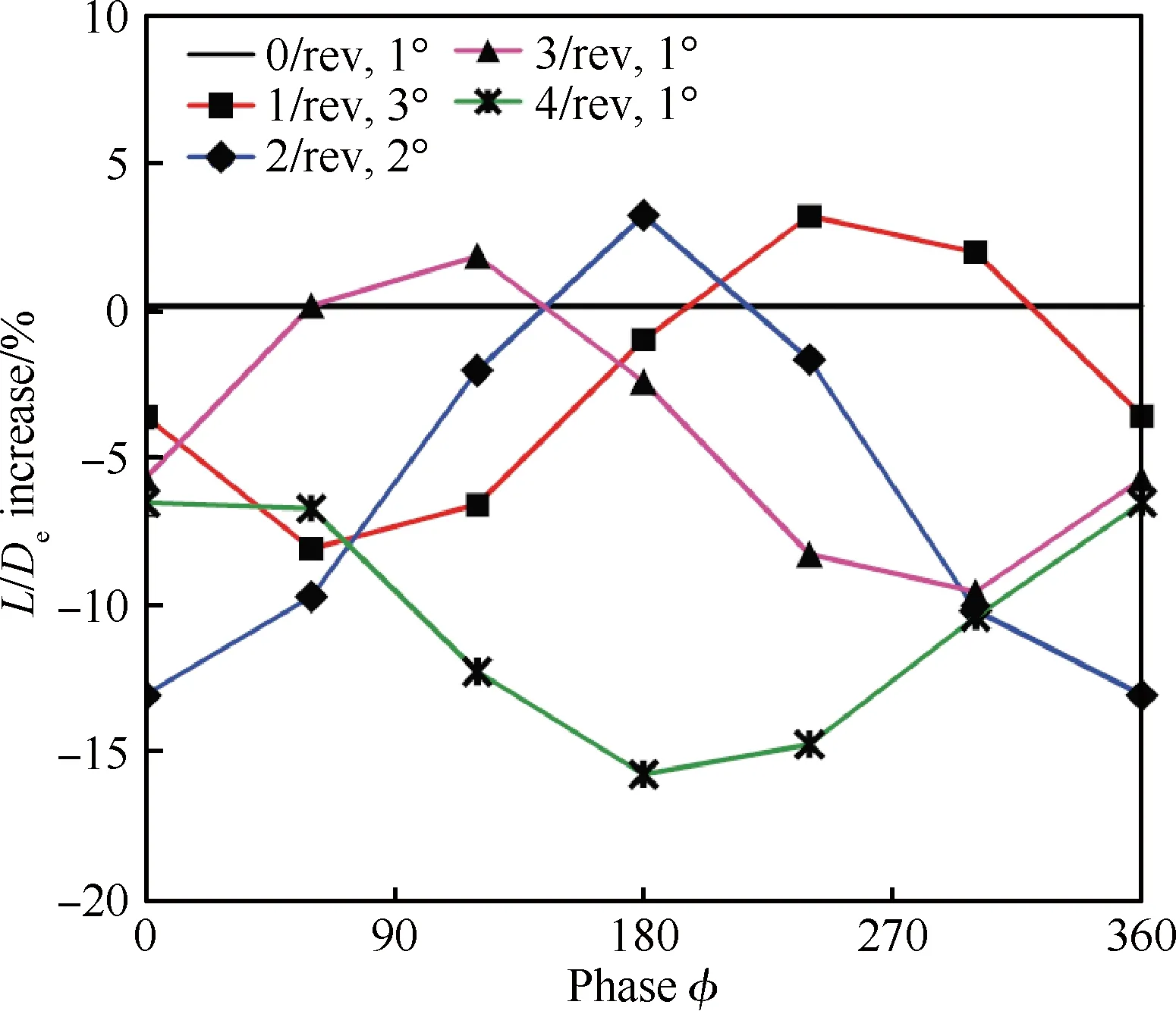
圖18 飛行狀態C8534時主動扭轉對旋翼升阻比影響[43]Fig.18 Effect of active twist on rotor lift-to-drag ratio in the flight state C8534[43]
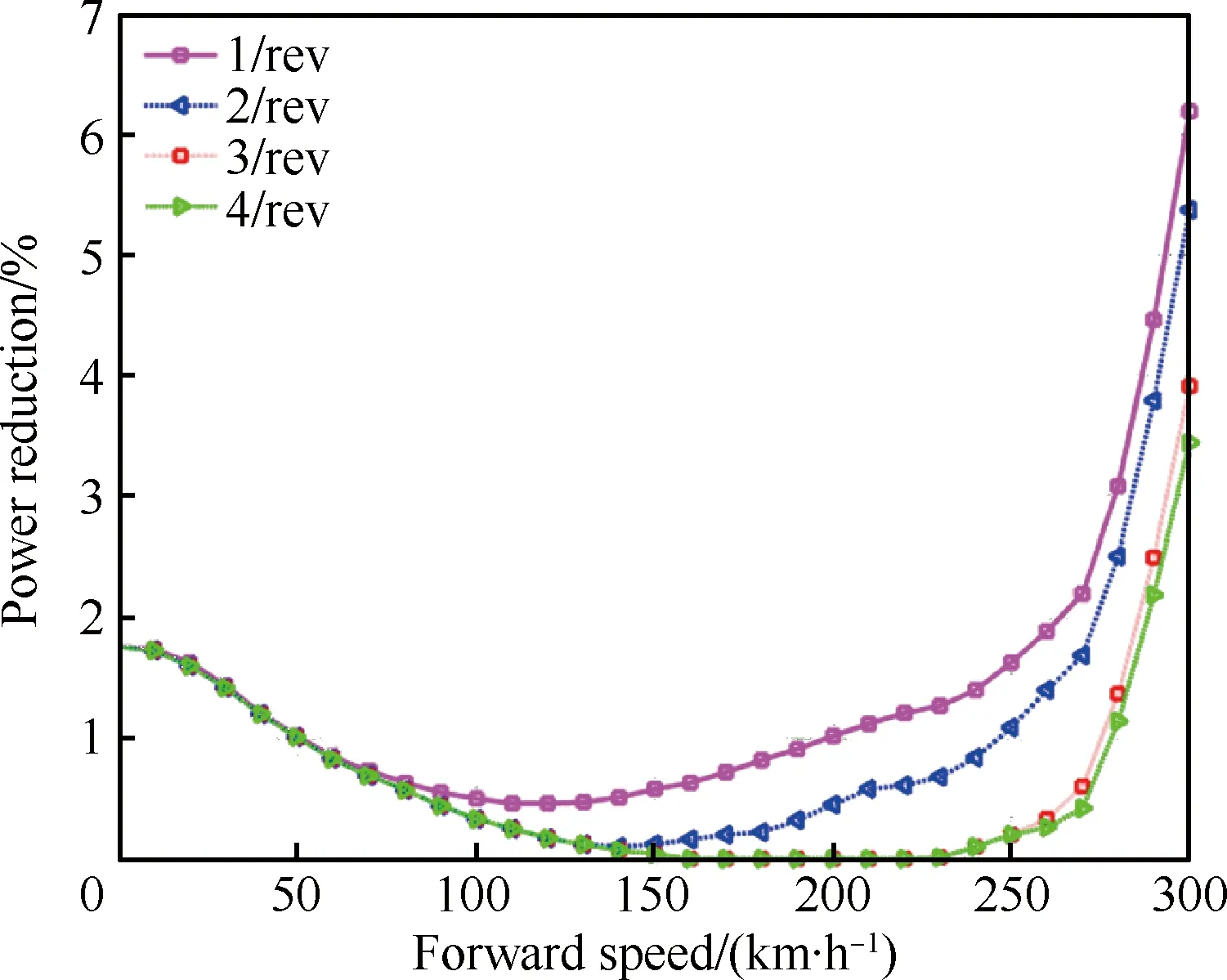
圖19 靜態扭轉耦合各階動態扭轉時旋翼功率的節省[45]Fig.19 Rotor power savings with static twist coupling with different harmonic dynamic twist[45]
前述相關研究都是基于槳葉扭轉角隨旋翼方位角不變的假設,筆者團隊則研究了槳葉動態扭轉對直升機飛行性能的提升效果[45]。文中分析了槳葉扭轉各階諧波量對旋翼需用功率的影響,包括靜態扭轉和動態扭轉,該文以類似UH-60A直升機為樣例,采用較為經典的剛性槳葉模型、2維翼型數據查表、3狀態入流和旋翼-機體耦合前飛配平模型等。圖19給出槳葉靜態扭轉耦合各階動態扭轉時旋翼功率節省的百分比[45],旋翼拉力系數為0.007 4。很明顯,懸停和低速時功率節省效果不明顯,隨著飛行速度增大,節省效果變差,高速時效果顯著,說明智能扭轉旋翼更適宜于提升高速飛行時旋翼性能,且低階動態扭轉節省旋翼功率的效果明顯高于高階。分析也指出,旋翼功率的節省主要源于槳葉靜態扭轉(0階),動態扭轉效果較小,起飛重量越大,槳葉扭轉獲得的功率節省越大。
智能扭轉旋翼目前尚處于實驗室階段,仍有一些應用于工程實踐的問題尚待解決,比如重量代價、能量消耗、可靠性和維修性等,隨著智能材料和結構技術的不斷發展,很有可能將來應用于旋翼振動和噪聲控制以及旋翼性能提升。
2.5 主動槳尖
旋翼槳葉尖部形狀對旋翼氣動特性影響顯著,現代旋翼均會對槳葉尖部形狀進行專門設計,主動槳尖通過改變旋翼槳葉尖部形狀來改變作用在其上的氣動力和力矩,以適應飛行環境和狀態變化,從而提升旋翼性能。Bernhard和Chopra提出了一種主動槳尖構型,該構型實際上是改變槳尖部槳距角,相關結構設計和懸停試驗驗證了主動槳尖概念的技術可行性[46-47]。目前,相關研究非常少。
2.6 前緣縫翼
前緣縫翼很早就應用于固定翼飛行器,用于延緩機翼上的氣流分離和增大機翼的升力系數。在旋轉翼上尚未得到實用,但進行過相關旋翼加裝前緣縫翼的理論和風洞試驗研究。
Bangalor和Sankar較早開展了加裝前緣縫翼旋翼氣動特性研究,運用三維可壓N-S方程計算了懸停和前飛時加裝前緣縫翼旋翼性能[48-49],結果表明,前緣縫翼可顯著提升大槳距時旋翼懸停性能,低槳距時旋翼懸停性能反而會降低。
Yeo和Lim將前緣縫翼應用于提升UH-60A直升機旋翼性能[50],揭示了前緣縫翼對旋翼性能的影響機理。前緣縫翼是增升裝置,小拉力載荷時,旋翼加裝前緣縫翼,其升阻比反而降低,需用功率增大;大拉力載荷時,升阻比才會增大,如圖20所示[50],需用功率隨之減小。由此可知,前緣縫翼適用于旋翼大負載狀態,小負載反而會增大旋翼需用功率。
通過風洞試驗,Lorber等確認了加裝前緣縫翼旋翼前后性能變化,如圖21所示[51],拉力系數CT較小時,加裝前緣縫翼會降低旋翼升阻比L/De并增大旋翼扭矩系數CQ,拉力系數較大時,旋翼升阻比增大旋翼扭矩減小,該研究從試驗方面驗證了前緣縫翼適宜于提升旋翼大負載時的性能。
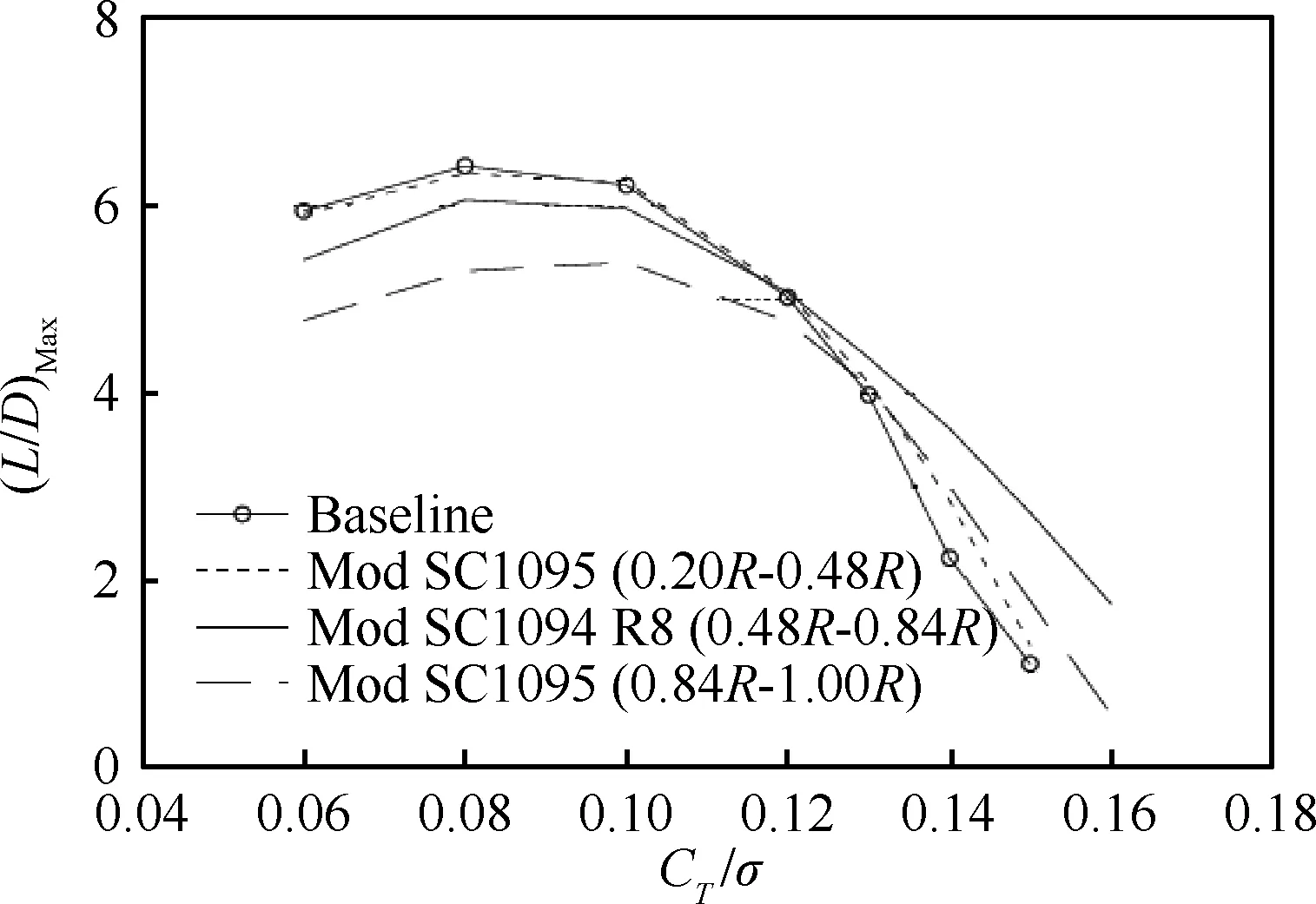
圖20 旋翼最大升阻比隨拉力載荷的變化[50]Fig.20 Maximum rotor lift-to-drag ratio vs thrust[50]
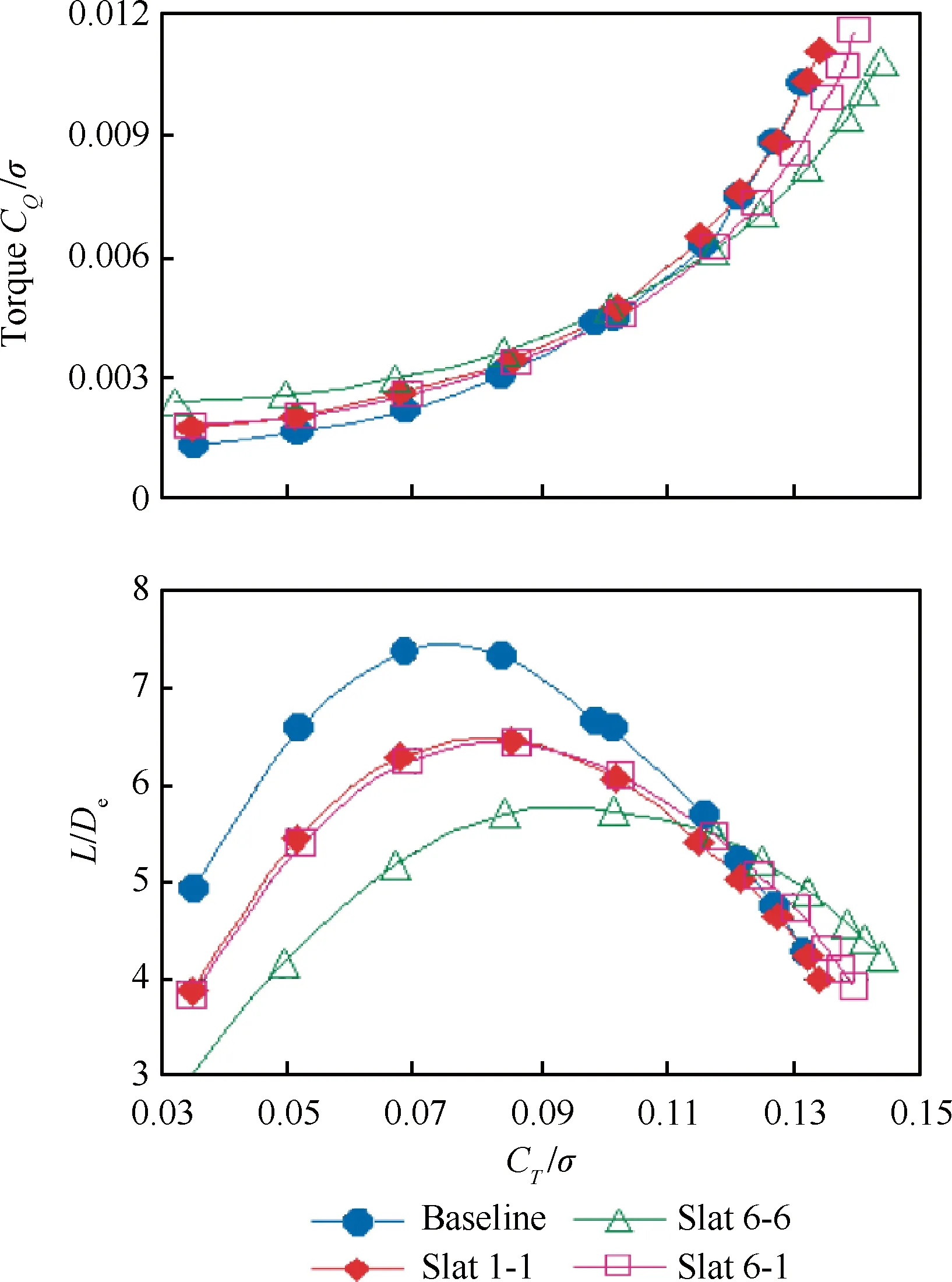
圖21 前進比為0.3時加裝前緣縫翼前后的 性能對比[51]Fig.21 Performance comparison with and without a leading edge slat at advance ratio 0.3[51]
Mishra和Baeder采用更為精細的方法分析了前緣縫翼對旋翼性能的提升效果[52]。該研究以UH-60A載荷試驗為基準,探討了40%展長前緣縫翼用于推遲大拉力狀態時UH-60A直升機旋翼的動態失速特性,基于耦合CFD/CSD方法的分析結果表明,該前緣縫翼可使旋翼最大拉力的增大超過10%。
目前在旋翼上加裝前緣縫翼的研究主要集中在理論分析,試驗研究相對較少,尚未見其在直升機型號方面的工程應用。
2.7 后緣襟翼
卡曼伺服襟翼很早就被應用于卡曼直升機,通過伺服襟翼偏轉驅動槳葉扭轉,進而操縱旋翼,如圖22所示。20世紀90年代Friedman教授團隊就開始將后緣襟翼應用于旋翼振動控制[20],隨后后緣襟翼被用于提升旋翼性能。
Liu等將主動后緣襟翼應用于旋翼振動控制和性能提升[53],揭示了后緣襟翼提升旋翼性能機理:由于主動后緣襟翼的存在,槳盤上的非定常氣動載荷分布得到改善,導致前行側的功率損失減小,旋翼需用功率降低,進而提升了旋翼性能。大速度前飛時,后緣襟翼能延緩動態失速,達到降低振動載荷和節省功率的效果。
為確認后緣襟翼對旋翼振動、噪聲和性能等方面影響,研究人員在NASA風洞中進行了加裝后緣襟翼MD 900直升機旋翼振動、噪聲和性能測試(SMART智能旋翼項目)[54]。試驗數據表明旋翼升阻比變化約在1%左右,由于該值在試驗誤差范圍內,難以判定后緣襟翼是否提升了旋翼性能。

圖22 卡曼伺服襟翼Fig.22 Kaman servo flap
隨后,Potsdam等采用CFD/CSD耦合方法對SMART旋翼性能、噪聲和載荷等進行了分析[55],基于配平的SMART旋翼分析結果表明,不同襟翼配置、旋翼拉力以及前進比時,后緣襟翼對旋翼性能的提升效果可忽略甚至略有降低,大體上與試驗數據一致。
Ravichandran等分析了后緣襟翼對直升機振動控制和性能提升的效果,在扭轉柔軟的槳葉上加裝正偏轉的后緣襟翼,可以有效提升旋翼懸停效率,如圖23所示[56],圖中:δ為后緣襟翼偏轉角。前進比為0.4時,較低階的諧波輸入后緣襟翼可降低4%~5%左右的旋翼需用功率。
后緣襟翼會驅動槳葉扭轉,進而影響旋翼性能。為探討扭轉剛度對加裝后緣襟翼旋翼性能的影響程度,Jain等采用基于升力線的綜合模型和CFD/CSD耦合方法,分析了大前進比時UH-60A直升機旋翼加裝后緣襟翼后性能,如圖24所示[57],較軟的槳葉扭轉剛度會降低旋翼升阻比。
為評估后緣襟翼對旋翼性能的影響,Lorber等在風洞中測試了加裝后緣襟翼旋翼的性能[58]。穩態時,加裝后緣襟翼旋翼懸停效率如圖25所示[58],圖中Col為旋翼總距。當后緣襟翼偏轉角度δ較小(±3°)時,旋翼的懸停效率變化較小,當偏轉角度較大(-9°)時,懸停效率降低幅值較大。
后緣襟翼與槳葉間連接存在的間隙,對加裝后緣襟翼旋翼的性能有影響,Jain等采用CFD/CSD耦合方法分析了該間隙與旋翼升阻比之間的關系[59],開縫后緣襟翼受到間隙的影響,相比無縫襟翼,旋翼性能降低,間隙越大,降低程度越大。
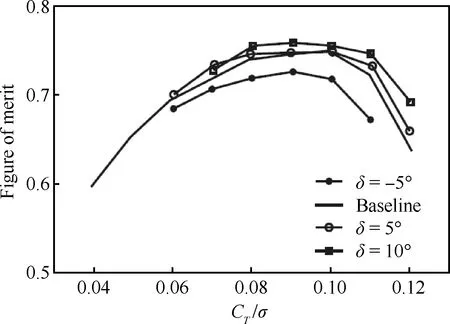
圖23 后緣襟翼偏轉角度對懸停效率的影響[56]Fig.23 Effect of deflection of trailing edge flap on figure of merit[56]
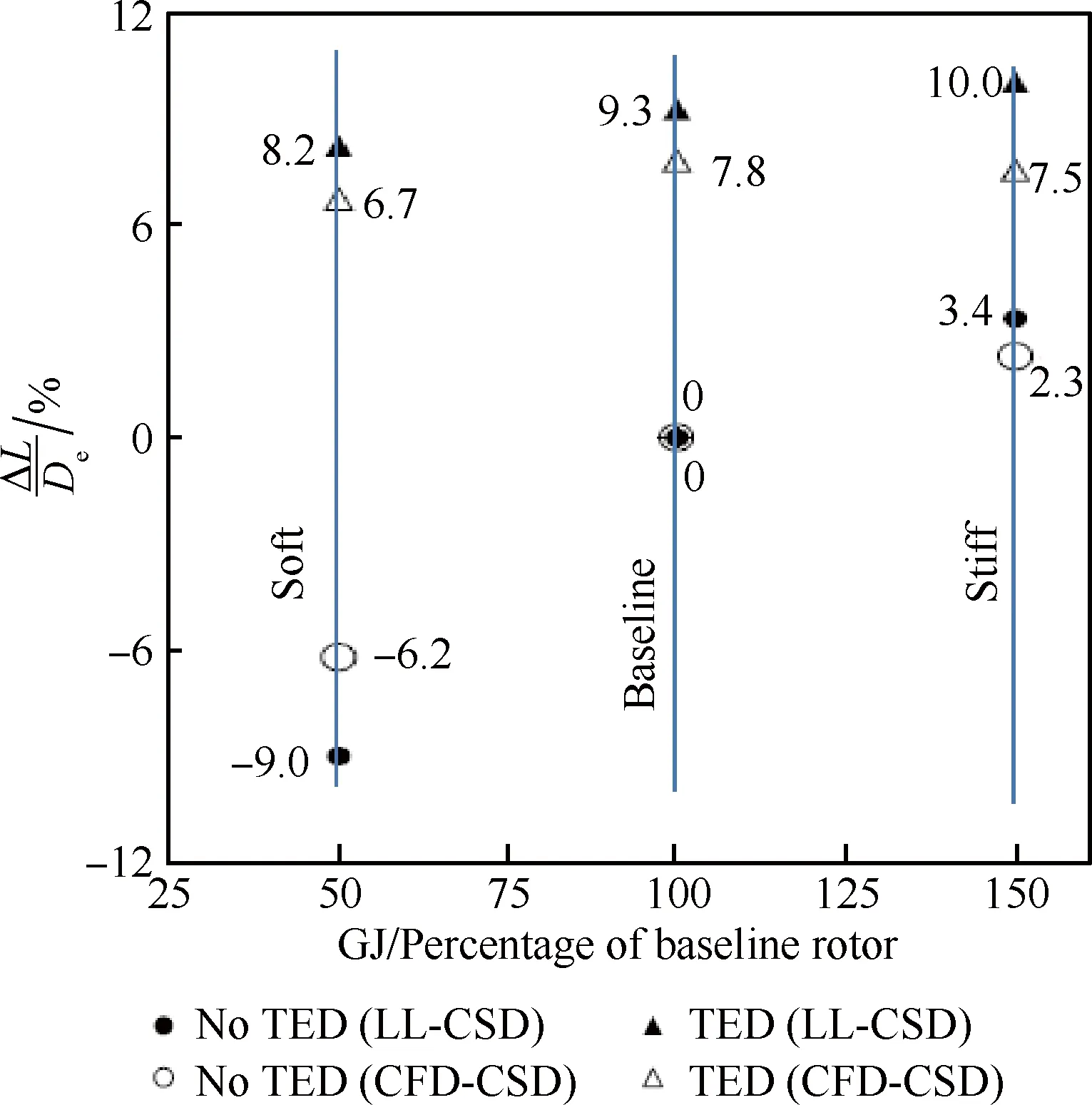
圖24 扭轉剛度對加裝后緣襟翼旋翼性能的影響[57]Fig.24 Effect of torsional stiffness on performance of rotor with trailing edge flap[57]
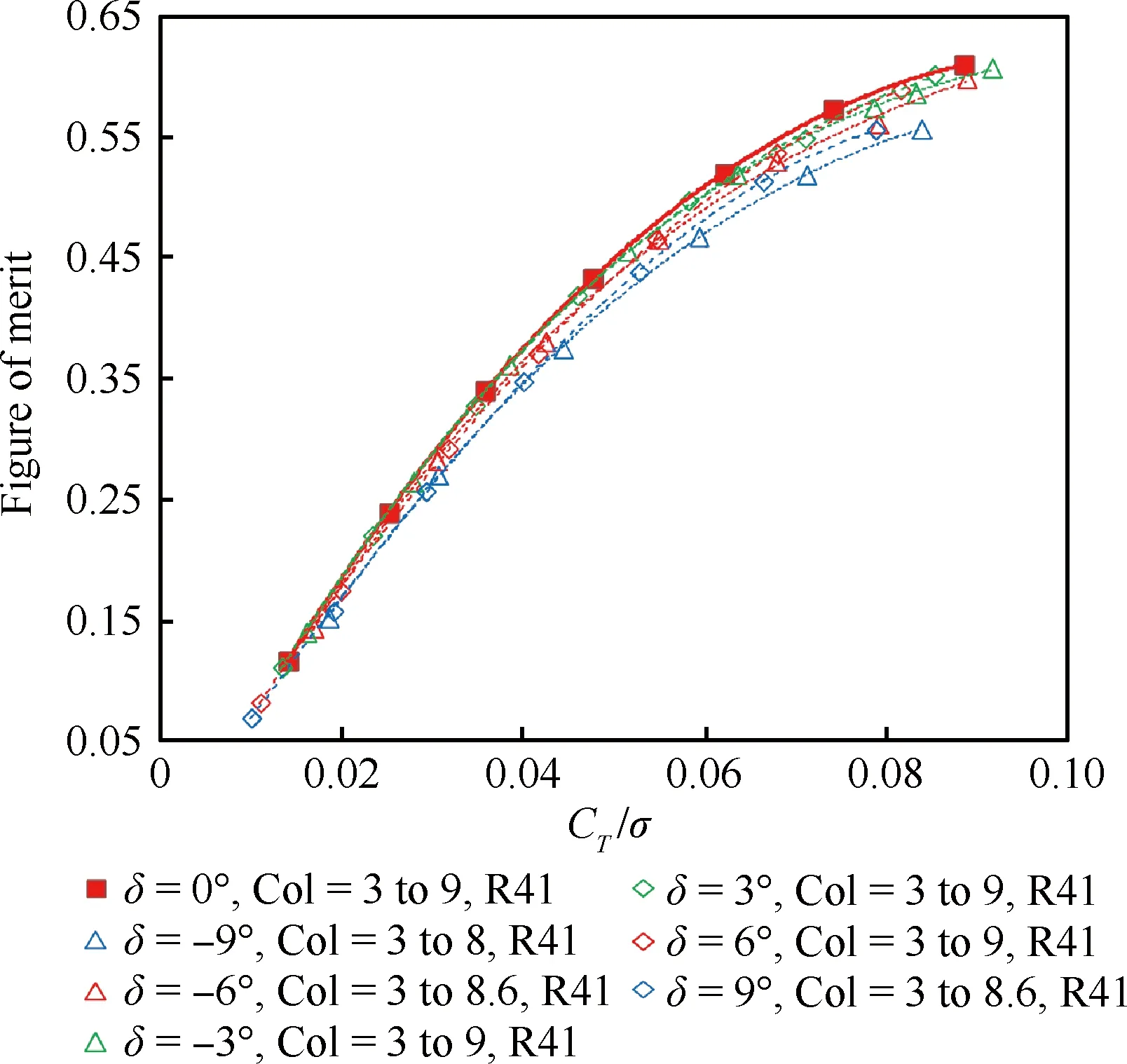
圖25 不同總距時后緣襟翼偏轉角度對 懸停效率的影響[58] Fig.25 Effect of deflection of trailing edge flap on figure of merit with different collective pitches[58]
為盡量降低飛行包線內加裝后緣襟翼旋翼的需用功率,Kody等優化了后緣襟翼的非諧波輸入量[60]。圖26給出最優輸入時樣例直升機需用功率節省最大值[60],前進比μ為0.3時,功率節省最多可達9.51%。
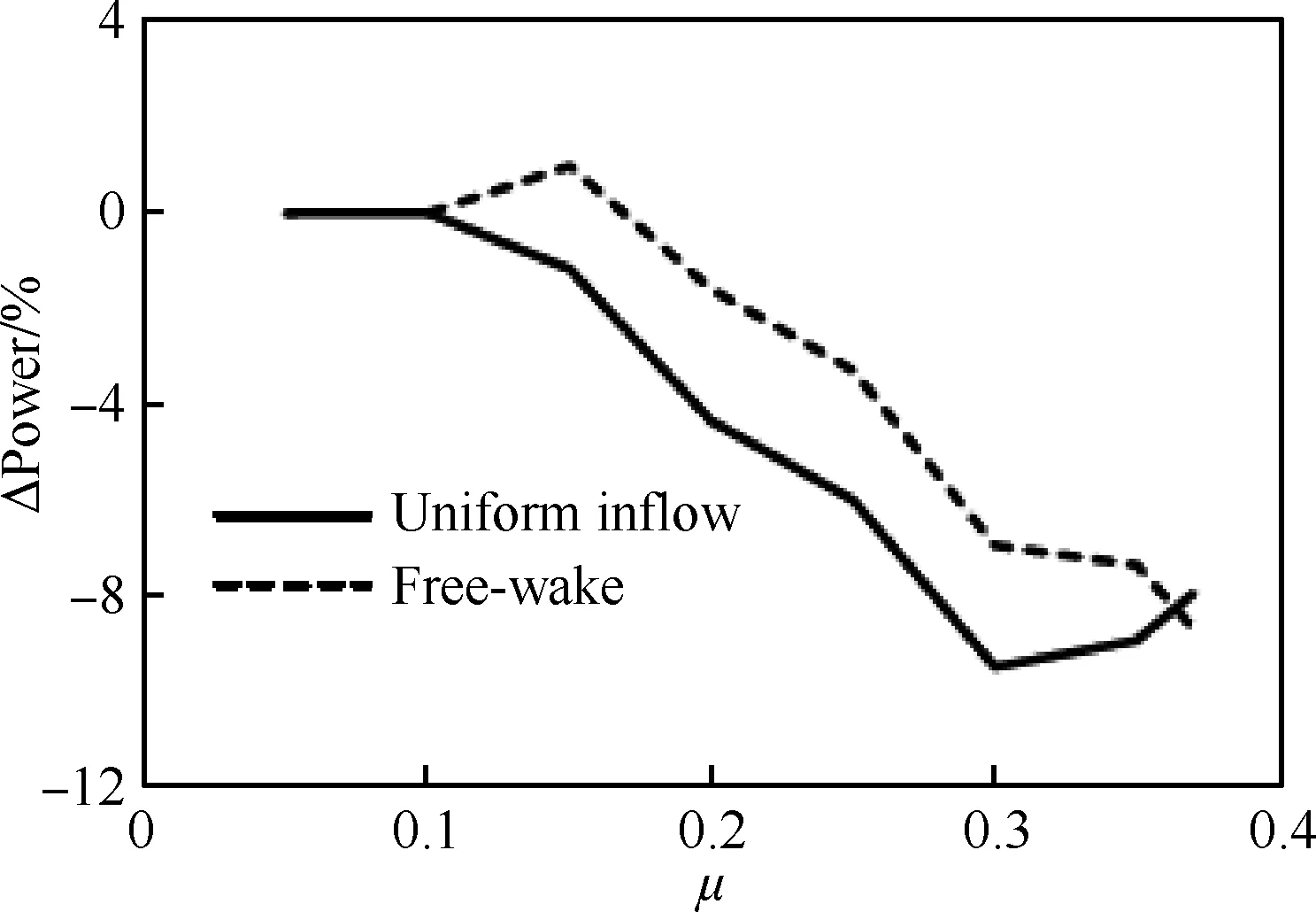
圖26 需用功率變化量隨前進比變化曲線[60]Fig.26 Curves of power change with advance ratio[60]
隨后,Kody等進一步研究了較高階諧波輸入對加裝后緣襟翼旋翼性能的提升和減振效果[61]。基于UH-60A直升機的分析表明,通過優化單段和多段后緣襟翼的高階諧波輸入量,可以實現明顯的功率節省和減振。優化單目標單段后緣襟翼,功率節省最多可達9.81%,優化單目標兩段后緣襟翼,功率節省效果變化不大,約為8.9%。
Wang和Lu揭示了2階動態變化后緣襟翼對旋翼性能的影響機理并作了參數分析[62]。后緣襟翼降低旋翼需用功率源于旋翼后行側迎角減小和前行側迎角增大帶來的型阻減少,后緣襟翼對性能的提升程度與槳葉失速程度緊密相關,速度越大、旋翼拉力越大,性能提升效果越好。
綜上,后緣襟翼,理論上能較大幅度提升大速度和大負載時的旋翼性能,但試驗測結果不夠理想,這可能源于試驗選取的飛行狀態與理論分析選擇的飛行狀態不一致。加裝主動后緣襟翼的BK117演示驗證機在2005年就進行了首飛[63],飛行試驗很好地驗證了后緣襟翼的振動主動控制能力。從工程實踐上來講,后緣襟翼已可應用于直升機,但重量代價、能量消耗、可靠性以至適航性等可能阻礙了其在直升機型號中的應用。
2.8 格尼襟翼
格尼襟翼最先被用于改善一級方程式賽車的抓地性能、提高彎道速度[64],后來拓展到航空領域,發現其具有增升顯著、構造簡單以及高可靠性等優點。如圖27所示,格尼襟翼是一塊高度約為翼型1%~5%弦長的平板,通常安裝在翼型后緣受壓的一側,加裝格尼襟翼會使翼型的升力系數和阻力系數同時增加,選取適當高度的格尼襟翼,能使翼型升力增加的幅度大于阻力增加的幅度,達到增大升阻比的目的[65]。
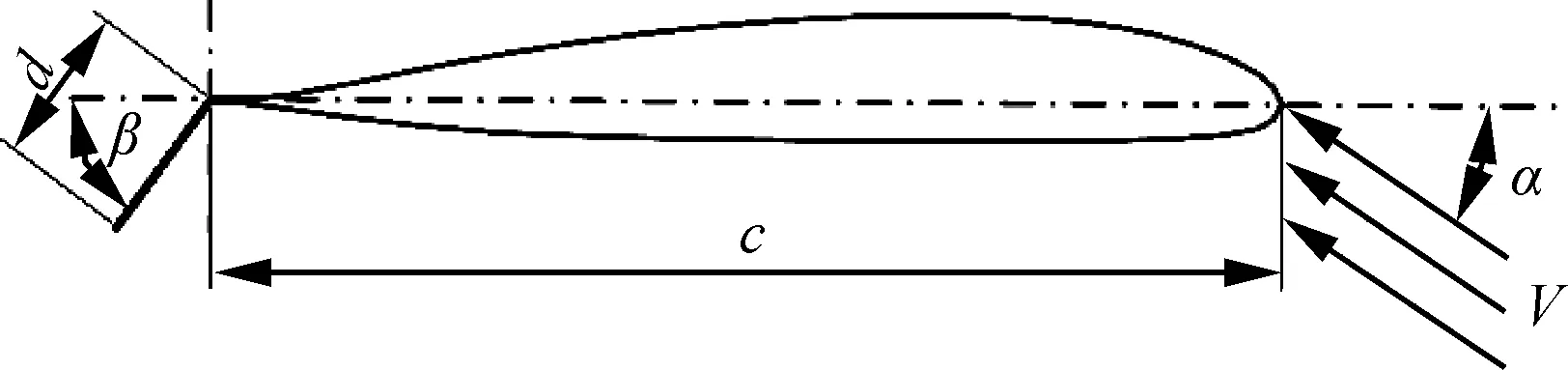
圖27 加裝格尼襟翼翼型示意圖Fig.27 Configuration of an airfoil with Gurney flap
Kentfield最早開展了加裝格尼襟翼旋翼性能研究[66],發現在前飛狀態下,格尼襟翼可有效提高后行槳葉的最大升力系數和升阻比,從而提升旋翼的性能。懸停和前飛時,旋翼的拉力可增大約10%,這個結果也得到了風洞試驗的驗證。
Nelson等將格尼襟翼應用的范圍拓展到微型旋翼飛行器[67],實驗測試了總距在0°~10°范圍內,旋翼拉力和需用功率的變化情況,如圖28所示,旋翼拉力增大50%~70%,功率消耗增加20%~30%,拉力與功率的比值總體提升量約為30%。
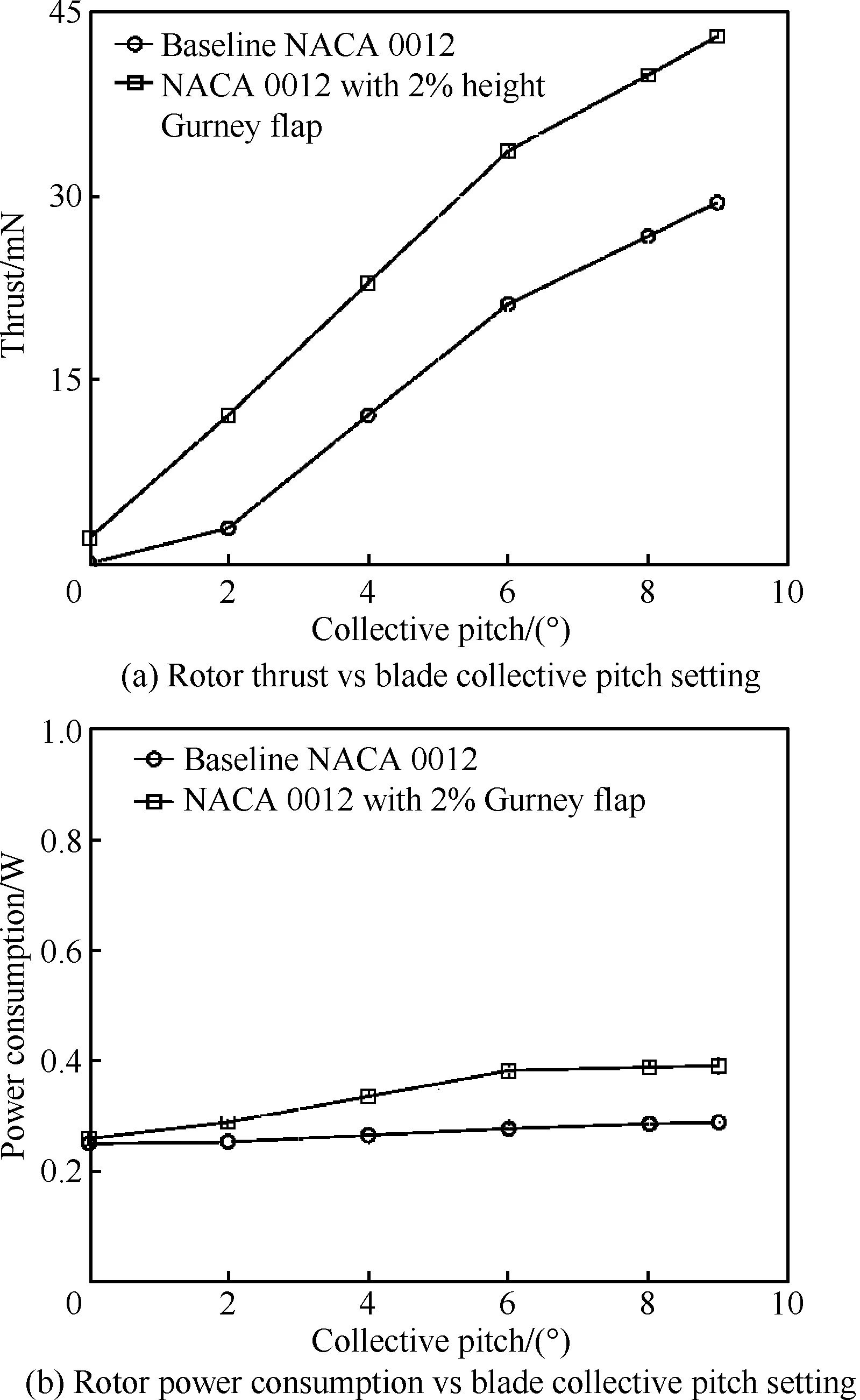
圖28 加裝格尼襟翼旋翼的拉力和需用功率的變化[67]Fig.28 Changes in rotor thrust and power with Gurney flap[67]
為更精確描述格尼襟翼對翼型氣動特性的影響,Kinzel等建立了加裝格尼襟翼翼型的非定常氣動模型[68],探討了微型尾緣效應器(MiTE,即可部署的格尼襟翼)對旋翼性能的影響。如圖29所示[68],圖中GW為直升機起飛重量,前飛速度較小時,直升機需用功率基本沒有變化,前飛速度較大時,加裝格尼襟翼可以顯著地降低需用功率,這主要源于格尼襟翼延緩了后行槳葉的失速。直升機起飛重量較大時,后緣襟翼提升旋翼性能的效果更好。
Bae等探討了槳葉展向不同位置處格尼襟翼對旋翼性能的提升效果[69]。以UH-60直升機為樣例的分析表明,最優布置時,大起飛重量或中等重量和高前飛速度組合時,旋翼需用功率節省最多高達40%,后行側的迎角也顯著減小,有效緩解了旋翼的失速問題。中低起飛重量和較低前飛速度時,即使還未達到失速狀態,格尼襟翼仍可有效地降低旋翼的需用功率(高達8.74%),表1給出了不同前進比和起飛重量時需用功率的節省程度[69]。
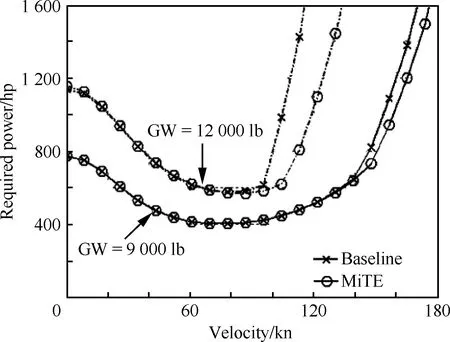
圖29 需用功率隨前飛速度變化曲線[68]Fig.29 Curves of power required change with forward speed[68]
表1 需用功率節省程度[69]Table 1 Savings of power required[69]
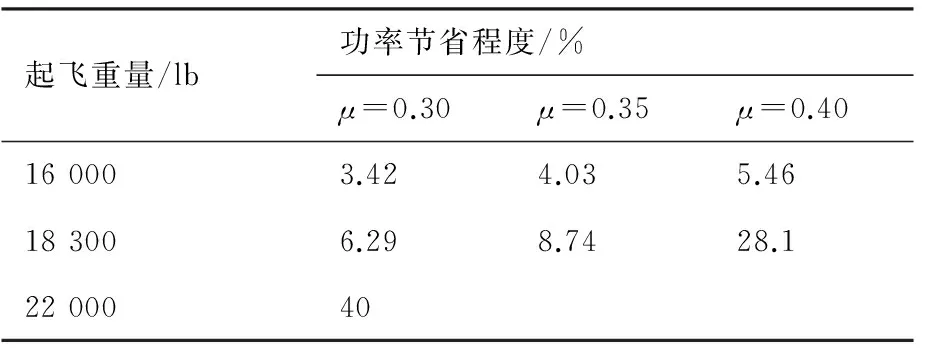
起飛重量/lb功率節省程度/%μ=0.30μ=0.35μ=0.40160003.424.035.46183006.298.7428.12200040
Bae等同樣以UH-60A直升機為樣例,研究了加裝1階主動格尼襟翼對直升機性能的提升效果[70]。研究表明,在旋翼70%~80%展向位置加裝高度2%弦長的格尼襟翼,較大的起飛重量和高度時,旋翼的需用功率降低大于11%。格尼襟翼提高了直升機的最大起飛重量(約1 000 lb)、最大飛行高度(1 400 ft,1 ft=30.48 cm)以及最大前飛速度(28 kn)。圖30給出了旋翼需用功率隨起飛重量的變化[70],存在起飛重量臨界點(21 000 lb),當起飛重量大于這個值時,加裝格尼襟翼才能降低旋翼的需用功率,否則會起相反作用。
加裝格尼襟翼的W3-Sokol旋翼的分析再次確認了[71],格尼襟翼更適宜于提升直升機大速度和/或大負載時旋翼性能。
目前,格尼襟翼在Bell 222U直升機垂尾上得到應用,從實現角度來看,格尼襟翼相對后緣襟翼簡單、更易于實現,而且驅動功率消耗明顯小很多[72],未來有望在直升機旋翼上得到應用。
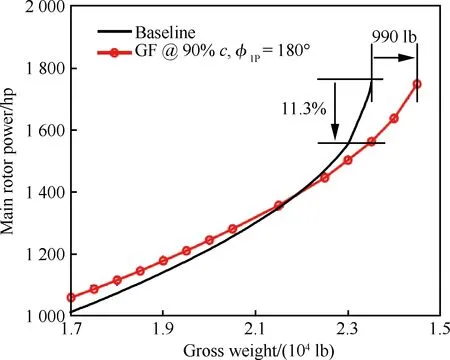
圖30 需用功率隨直升機起飛重量變化 (90 kn,8 000 ft)[70]Fig.30 Power required vs helicopter takeoff weight (90 kn, and 8 000 ft)[70]
2.9 槳葉變弦長
槳葉增大弦長可減小翼型剖面迎角、減小弦長可增大槳葉剖面迎角,通過在飛行過程中改變弦長可優化翼型剖面迎角及升阻比,從而降低旋翼需用功率、提升旋翼性能。
Léon等研究了可伸展弦長槳葉段用于擴展旋翼飛行器的飛行包線[73]。圖31給出了起飛重量為24 000 lb、飛行高度為8 000 ft時UH-60直升機需用功率隨前飛速度變化關系[73],翼型增大弦長可明顯提高直升機最大飛行速度并降低需用功率,究其原因,增大弦長可提高失速主導飛行狀態旋翼性能。文中可伸展弦長翼型氣動模型是基于NACA 0012翼型風洞測試數據,翼型弦長增大后,理論模型的預測精度可能不足,所得到結果可能過于樂觀。
可伸展弦長安裝角對翼型氣動特性、槳葉彈性變形和翼型非定常氣動特性均有影響,Khoshlahjeh和Gandhi在建模中考慮了這些因素對旋翼性能的影響[74]。分析確認了可伸展弦長旋翼用于提升直升機升限、最大飛行速度以及起飛重量的效果,但較小起飛重量和較低飛行高度時,旋翼需用功率反而會增加。翼型弦長伸展后,槳葉低頭方向的彈性扭轉力矩增大,槳葉尖部低頭方向彈性扭轉角增大,槳葉尖部載荷向翼型弦長伸展處偏移,從而帶來旋翼功率的節省,同時也伴隨著小拉桿載荷的增大。
旋翼槳葉變弦長概念較新,相關研究較少,尚未見真實槳葉變弦長相關試驗研究,該概念離實際應用還有較長一段距離。
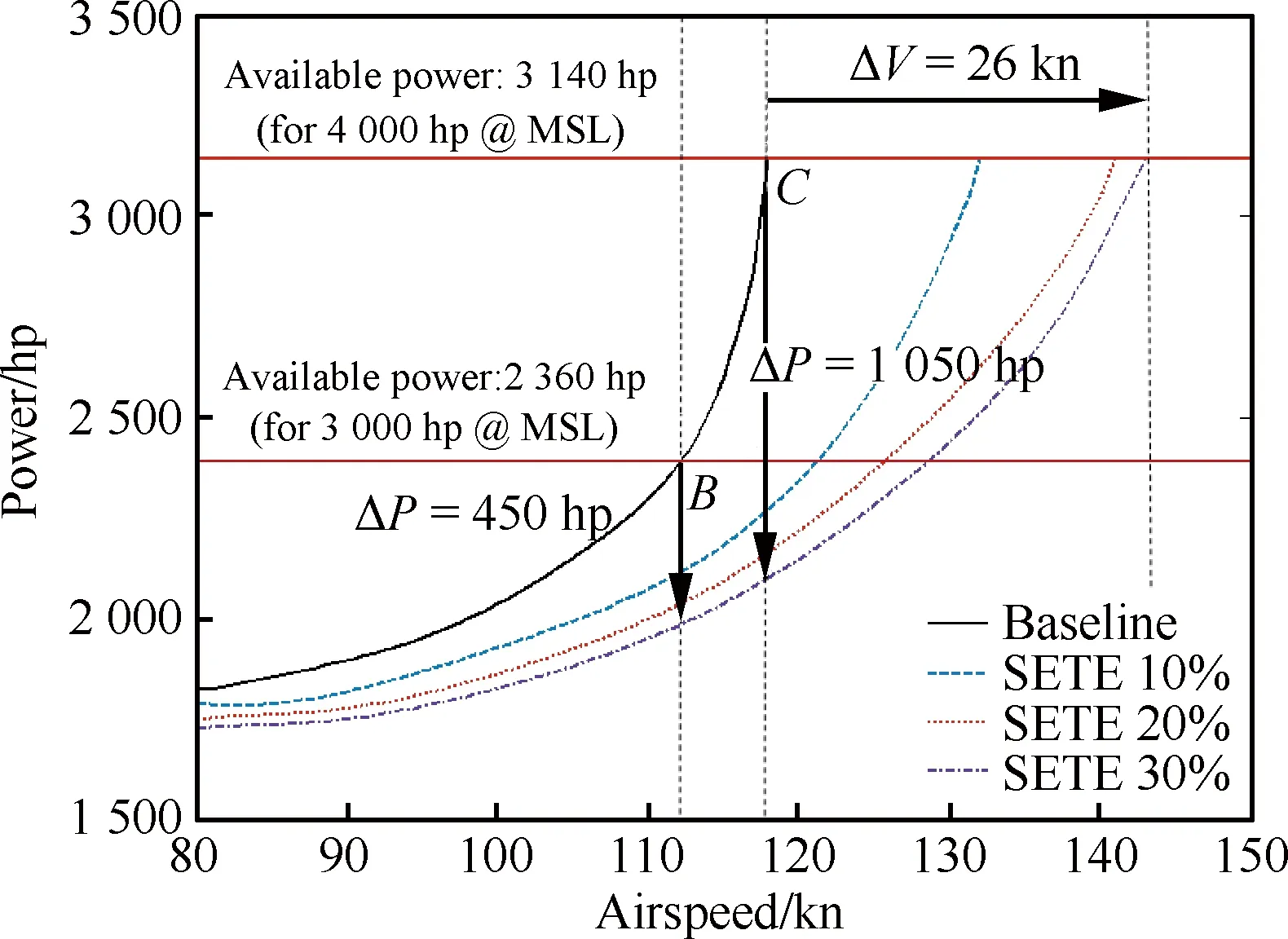
圖31 直升機需用功率隨速度變化關系(起飛重量為24 000 lb,飛行高度為8 000 ft)[73]Fig.31 Power required vs. forward speed (24 000 lb, and 8 000 ft)[73]
2.10 翼型變彎度
槳葉翼型剖面彎度變化帶來翼型升力線斜率發生變化,從而改變翼型剖面迎角,進而優化翼型剖面升阻比,帶來旋翼功率節省和性能提升。
Kumar和Cesnik研究了翼型變彎度(Active Camber Deformation)用于旋翼性能提升和振動主動控制[75]。基于Bo-105模型旋翼的分析表明,前進比為0.33、旋翼拉力系數為0.008時,翼型變彎度對旋翼性能的提升程度不大,均小于4%,且會伴隨槳轂某些諧波載荷的增大,難以達到載荷和性能同時提升的效果。
旋翼槳葉剖面剛度相對較大,要想改變其彎度難度很大,目前尚未見相關工程實現、試驗和應用研究,離實際應用還有很長一段距離。
2.11 性能提升對比
自適應旋翼構型較多,各種構型所獲得的性能提升隨飛行環境和飛行狀態各不相同,為探討各自適應旋翼構型更佳適應的飛行環境和飛行狀態,多位研究人員進行了自適應旋翼提升旋翼性能的對比研究。
Yeo探討了7種構型自適應旋翼提升旋翼性能的能力[76]。該文以AH-64直升機旋翼為樣例,槳葉翼型更新為VR-12先進翼型。基于CAMRAD Ⅱ軟件的分析結果表明,前緣縫翼、變前緣下垂角、振蕩射流和格尼襟翼可用于提升旋翼承載能力,但這些構型自適應旋翼并不會增加CT/σ=0.007 5時的旋翼升阻比。采用2階諧波輸入時,獨立槳距控制、槳葉主動扭轉和后緣襟翼可用于提升旋翼升阻比,160~200 kn速度范圍內,升阻比的增加可達6%,巡航速度時可達2%左右。
Kang等對比了多種構型自適應旋翼提升直升機旋翼性能的潛力[18],采用中型通用直升機(應該是UH-60直升機) 作為算例,分析了巡航(CT=0.006 1、μ=0.186)和最大前飛速度(CT=0.008 1、μ=0.398)時旋翼性能的提升程度。表2給出所分析構型自適應旋翼需用功率節省百分比對比[18],很明顯,巡航時,旋翼變轉速技術在提升旋翼性能方面優勢明顯,最大速度時,1階槳葉變弦長提升旋翼性能效果更佳。
Jain等采用CSD/CFD耦合方法和升力線(L-L)方法研究了后緣變形、前緣變形和主動扭轉對旋翼性能的提升效果,如圖32所示[43]。以UH-60A直升機為樣例,表3和表4分別給出了高速 (C8534) 和大拉力(C9017)兩種飛行狀態時各自適應旋翼構型對旋翼性能的提升效果[43]。由于后緣變形和主動扭轉主要改善前行側槳葉槳尖處氣動特性,更加適合于大速度飛行狀態,而前緣變形主要推遲了后行側槳葉動態失速,更加適合于大拉力飛行狀態。當然文中的分析也指出,低階展開方式所獲得的性能提升高于高階方式。
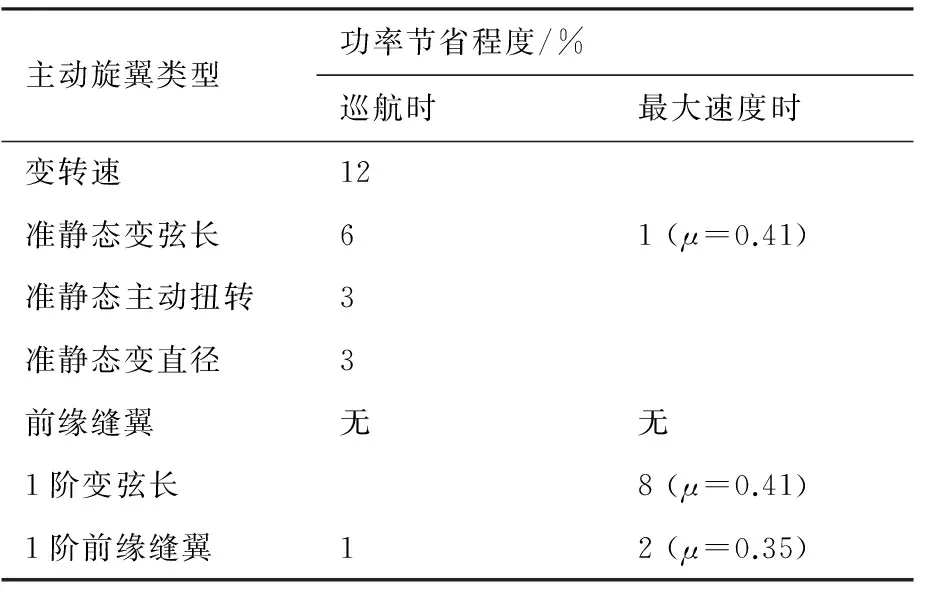
表2 不同構型主動旋翼功率節省對比[18]

圖32 帶后緣變形、前緣變形和主動扭轉槳葉 示意圖[43] Fig.32 Configuration of blade with trailing edge deflection, leading edge deflection and active twist[43]
表3 高速飛行狀態(C8534)性能提升對比[43]Table 3 Comparison of performance improvement in high speed flight condition (C8534) [43]
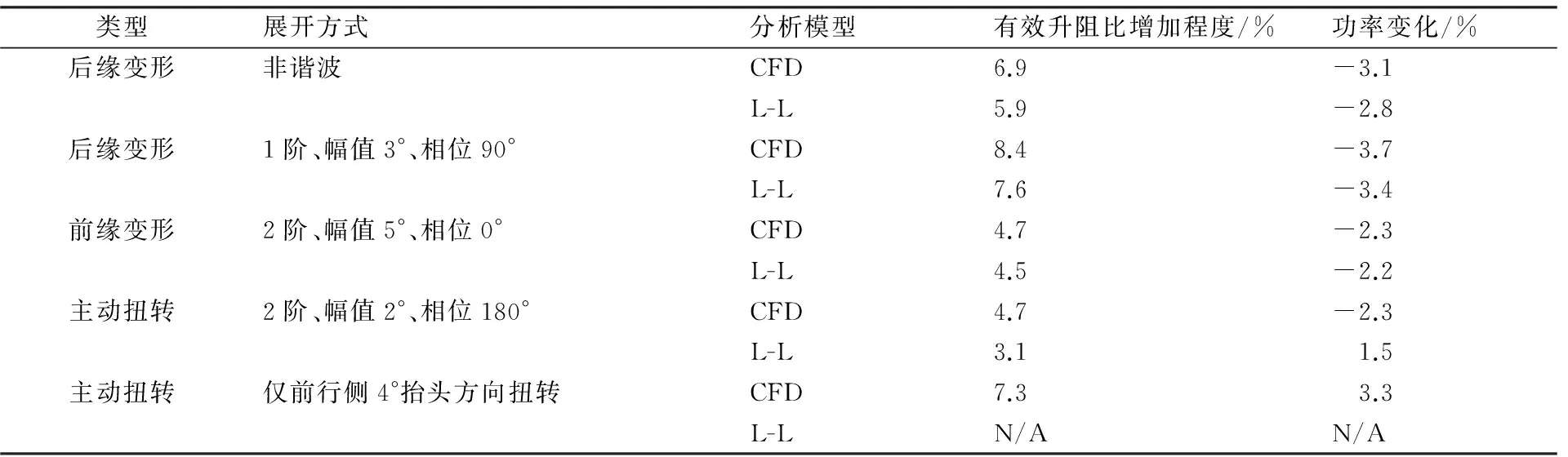
類型展開方式分析模型有效升阻比增加程度/%功率變化/%后緣變形非諧波CFD6.9-3.1L-L5.9-2.8后緣變形1階、幅值3°、相位90°CFD8.4-3.7L-L7.6-3.4前緣變形2階、幅值5°、相位0°CFD4.7-2.3L-L4.5-2.2主動扭轉2階、幅值2°、相位180°CFD4.7-2.3L-L3.1 1.5主動扭轉僅前行側4°抬頭方向扭轉CFD7.3 3.3L-LN/AN/A
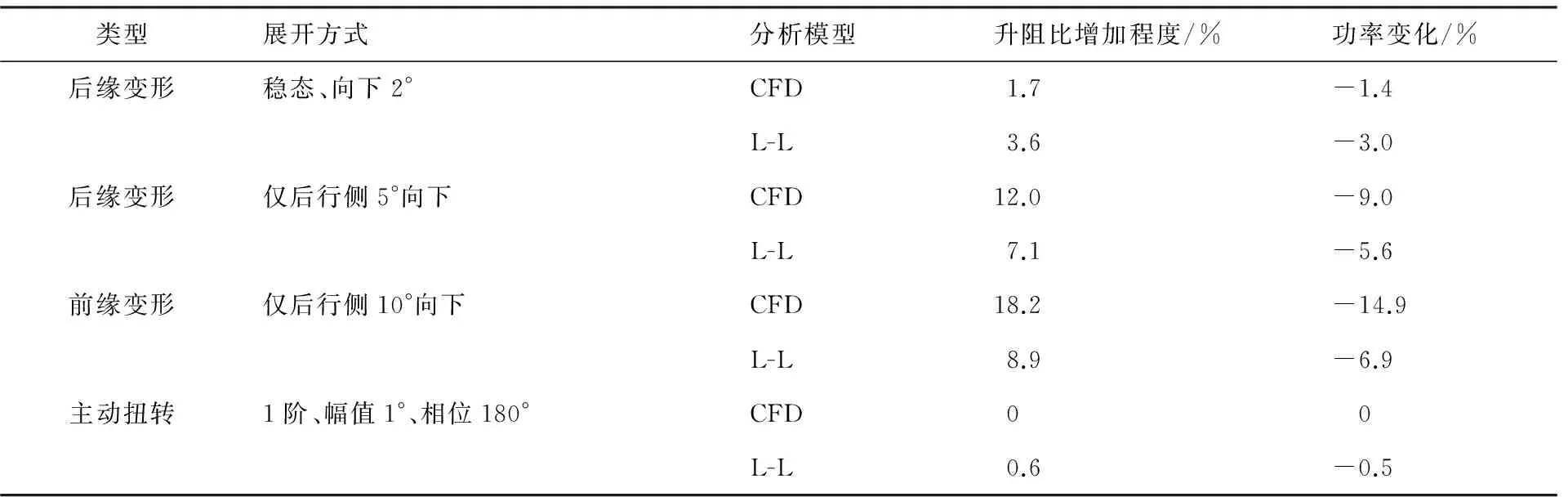
表4 大拉力飛行狀態(C9017)性能提升對比[43]Table 4 Comparison of performance improvement in high thrust flight condition (C9017) [43]
3 國內研究現狀
與國外相比,國內開展自適應旋翼提升旋翼性能方面的研究相對較晚,研究所涉及的廣度和深度相對有限,但在逐步有序展開。
筆者較早開展了旋翼變轉速技術提升直升機飛行性能研究[77],分析表明,降低旋翼轉速可明顯降低旋翼需用功率、提升直升機飛行性能,旋翼轉速變化對直升機配平影響明顯,配平限制了旋翼工作于過低的轉速,另一方面,旋翼轉速過低反而有可能增加旋翼的需用功率。徐明等通過風洞試驗證實了旋翼變轉速技術提升懸停和前飛時旋翼性能的效果[78]。為進一步提升變轉速旋翼性能,徐明等優化了變轉速旋翼槳葉負扭、尖削和翼型分布等參數[79],風洞試驗驗證了其對需用功率的降低效果。劉士明等通過分析指出[80],合理降低旋翼轉速,可以使得直升機最大起飛重量時的需用功率降低30%。
薛立鵬等研究了變直徑傾轉旋翼機氣動特性[81],研究表明,旋翼變直徑能有效提升傾轉旋翼機氣動效率。筆者團隊等則分析了旋翼直徑變化對直升機飛行性能的提升效果[82],研究表明變直徑旋翼更適合提升高速飛行時的直升機性能。
王超等運用槳距主動控制提升旋翼性能[83],施加適當幅值和初相位的2階槳距控制可以改善槳盤平面迎角分布,推遲后行側槳葉失速和延緩前行側槳葉激波影響,適宜于降低高速、大載荷飛行狀態時旋翼需用功率。
崔釗等研究了加裝格尼襟翼的自轉旋翼氣動特性[84],加裝一定高度的格尼襟翼有助于降低自轉旋翼的阻力,提升其性能。張勇剛等通過給旋翼加裝格尼襟翼提升直升機飛行性能[85],文中基于UH-60直升機的分析表明,重量系數較小且前飛速度較低時,加裝格尼襟翼反而會降低旋翼性能;在重量系數較大且高速前飛時,旋翼加裝格尼襟翼能夠顯著降低直升機的需用功率。加裝轉動格尼襟翼提升旋翼性能的效果優于加裝固定高度格尼襟翼。
筆者團隊等研究了多種旋翼變體技術提升直升機飛行性能的效果[86],對比分析表明,在性能提升方面,旋翼變轉速明顯優于槳葉變弦長和槳葉變扭轉,高速前飛時,相較于旋翼變轉速,旋翼變直徑能節省更多的功率。
國內在自適應旋翼提升旋翼性能方面的研究主要集中在旋翼變轉速、旋翼變直徑以及旋翼加裝格尼襟翼等自適應旋翼構型,研究工作以理論為主、試驗為輔,較少在工程實踐方面開展研究。
4 總結與展望
自適應旋翼可根據飛行環境和飛行狀態的變化,在飛行過程中優化旋翼參數,擺脫了制約旋翼被動設計難以兼顧多個飛行狀態的約束,達到多個飛行狀態飛行性能較優、充分發揮旋翼潛力的效果。本文重點梳理旋翼變轉速、旋翼變直徑、獨立槳距控制、智能扭轉旋翼、主動槳尖、前緣縫翼、后緣襟翼、格尼襟翼、槳葉變弦長、翼型變彎度等多個構型自適應旋翼技術在提升旋翼性能方面的研究進展。
從旋翼性能提升方面來講,旋翼總體設計參數,比如旋翼轉速、旋翼直徑,對旋翼性能影響較大,應優先考慮其用于提升旋翼性能的可能性。槳葉參數,比如槳葉負扭轉、翼型弦長、前后緣襟翼等,這些參數的變化對旋翼性能影響相對較小,在某些飛行狀態時,比如大負載、高速和高海拔,對旋翼性能影響較大,應重點在這些飛行狀態考慮其提升旋翼性能的能力。
從工程實現方面來講,自適應旋翼各具體構型的實現方法和難度不盡相同,有些已經在旋翼飛行器中得到應用,比如旋翼變轉速,預計將來會在旋翼飛行器中得到普遍應用;有些已經經過試飛驗證,比如獨立槳距控制、后緣襟翼,將來有可能得到應用;有些尚處于實驗室階段,比如智能扭轉旋翼、格尼襟翼、前緣縫翼等,離實際應用還有一段距離;有些尚處于理論研究階段,比如旋翼變直徑、主動槳尖、槳葉變弦長、翼型變彎度等,離工程實現還有相當長一段距離。
國內在自適應旋翼方面的研究與國外相比,無論是深度還是廣度方面,仍有一定差距,應加強相關方面研究。
從目前的自適應旋翼技術研究現狀來看,以下方面將是未來自適應旋翼技術發展的重點:
1) 多功能自適應旋翼研究
自適應旋翼不僅可應用于提升旋翼性能,還可應用于諸如振動和噪聲控制、穩定性增強以及飛行品質改善等方面。已有研究人員開展了自適應旋翼應用于同時提升旋翼性能和降低振動方面研究。是否可通過單構型自適應旋翼同時達到雙目標甚至多目標的效果,將是未來自適應旋翼研究的重要內容之一。
2) 復合構型自適應旋翼研究
單構型自適應旋翼有其優勢,也有其不足之處。比如旋翼變轉速技術并不適用于降低直升機大速度飛行時需用功率,可采用另外一種自適應旋翼構型,比如格尼襟翼或后緣襟翼,增強變轉速旋翼直升機高速飛行性能。因此,將兩種或以上構型自適應旋翼相復合,取長補短,擴展整個直升機飛行包線性能,將是未來自適應旋翼研究的重要內容之一。
3) 新構型自適應旋翼研究
自適應旋翼構型較多,文中探討的構型有限,有些構型觸及較少,有些構型的潛力尚未被充分挖掘,比如合成射流,這些潛在的自適應旋翼構型對旋翼性能的提升程度如何,有待通過深入研究來確認。挖掘新構型自適應旋翼的潛在價值并提升旋翼性能,將是未來自適應旋翼研究的重要內容之一。
4) 自適應旋翼技術工程實現
自適應旋翼在提升旋翼性能或其他目標時,也會付出相應的代價,比如重量、能量、可靠性、強度等,這些負面問題制約了自適應旋翼的工程實現,這些問題解決的好壞將對自適應旋翼的應用產生深遠影響,這些問題的研究將是未來自適應旋翼研究的重要內容之一。
提升旋翼性能是旋翼技術發展的永恒主題,自適應旋翼將是未來先進旋翼技術發展的重點和熱點之一。
[1] SIKORSKY I A. Aerodynamic parameters selection in helicopter design[J]. Journal of the American Helicopter Society, 1960, 5(1): 41-60.
[2] BROCKLEHURST A, BARAKOS G N. A review of helicopter rotor blade tip shapes[J]. Progress in Aerospace Sciences, 2013, 56: 35-74.
[3] FRADENBURGH E A. Aerodynamic design of the Sikorsky S-76 spirittm helicopter[J]. Journal of the American Helicopter Society, 1979, 24(3):11-19.
[4] GESSOW A. Effects of rotor-blade twist and plan-form taper on helicopter hovering performance: NACA 1542 [R].Washington, D.C.: NACA, 1947.
[5] MCVEIGH M A, MCHUGH F J. Influence of tip shape, chord, blade number, and airfoil on advanced rotor performance[J]. Journal of the American Helicopter Society, 1984, 29(4): 55-62.
[6] YEN J G. Effects of blade tip shape on dynamics, cost, weigh, aerodynamic performance, and aeroelastic response[J]. Journal of the American Helicopter Society, 1994, 39(4): 37-45.
[7] YEO H, BOUSMAN W G, Johnson W. Performance analysis of a utility helicopter with standard and advanced rotors[J]. Journal of the American Helicopter Society, 2004, 49(3): 250-270.
[8] KAREM A E. Optimum speed rotor: 6007298[P]. 1999-02-19.
[9] PROUTY R W. Should we consider variable rotor speeds? [J]. Vertiflite, 2004, 50(4): 24-27.
[10] STEINER J, GANDHI F, YOSHIZAKI Y. An investigation of variable rotor RPM on performance and trim[C]∥the American Helicopter Society 64th Annual Forum. Fairfax, VA: American Helicopter Society, 2008: 697-705.
[11] DIOTTAVIO J, FRIEDMANN D. Operational benefit of an optimal, widely variable speed rotor[C]∥The American Helicopter Society 66th Annual Forum. Fairfax, VA: American Helicopter Society, 2010: 1011-1017.
[12] GARAVELLO A, BENINI E. Preliminary study on a wide-speed-range helicopter rotor/turboshaft system[J]. Journal of Aircraft, 2012, 49(4): 1032-1038.
[13] MISTé G A, BENINI E. Performance of a turboshaft engine for helicopter applications operating at variable shaft speed[C]∥Proceedings of the ASME 2012 Gas Turbine India Conference. New York: American Society of Mechanical Engineers, 2012: 701-715.
[14] MISTéG A, BENINI E, GARAVELLO A, et al. A methodology for determining the optimal rotational speed of a variable RPM main rotor/turboshaft engine system[J]. Journal of the American Helicopter Society, 2015, 60(3): 0320091-03200911.
[15] MISTRY M, GANDHI F. Helicopter performance improvement with variable rotor radius and RPM[J]. Journal of the American Helicopter Society, 2014, 59 (4): 13-35.
[16] HAN D, PASTRIKAKIS V, BARAKOS G N. Helicopter performance improvement by variable rotor speed and variable blade twist[J]. Aerospace Science and Technology, 2016, 54(1): 164-173.
[17] SEGEL R M, FRADENBRUGH E A. Development of the trac variable diameter rotor concept[C]∥AIAA/AHS VTOL Research, Design, and Operations Meeting, George Institute of Technology. Reston, VA: AIAA, 1969: 1-10.
[18] KANG H, SABERI H, GRANDHI F. Dynamic blade shape for improved helicopter rotor performance[J]. Journal of the American Helicopter Society, 2010, 59(1): 032008.
[19] MISTRY M, GANDHI F. Helicopter performance improvement with variable rotor radius and RPM[J]. Journal of the American Helicopter Society, 2014, 59(4): 042010.
[20] FRIEDMANN P P. On-blade control of rotor vibration, noise, and performance: Just around the corner?[J]. Journal of the American Helicopter Society, 2014, 59(4): 041001.
[21] PAYNE P R. Higher harmonic rotor control: The possibilities of third and higher harmonic feathering for delaying the stall limit in helicopters[J]. Aircraft Engineering and Aerospace Technology, 1958, 30(8): 222-226.
[22] ARCIDIACONO P J. Theoretical performance of helicopters having second and higher harmonic feathering control[J]. Journal of the American Helicopter Society, 1961, 5(2): 8-19.
[23] SHAW J, ALBION N, HANKER E J, Jr., et al. Higher harmonic control: Wind tunnel demonstration of fully effective vibratory hub force suppression[J]. Journal of the American Helicopter Society, 1989, 34(1): 14-25.
[24] NGUYEN K, CHOPRA I. Effects of higher harmonic control on rotor performance and control loads[J]. Journal of Aircraft, 1992, 29(3): 336-342.
[25] JACKLIN S A, LEYLAND J A, BLAAS A. Full-scale wind tunnel investigation of a helicopter individual blade control system[C]∥34th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Reston, VA: AIAA, 1993: 576-586.
[26] JACKLIN S A, BLASS A, TEVES D, et al. Reduction of helicopter BVI noise, vibration, and power consumption through individual blade control[C]∥The American Helicopter Society 51st Annual Forum. Fairfax, VA: American Helicopter Society, 1995: 662-680.
[27] CHENG R P, THEODORE C R, CELI R. Effects of two/rev higher harmonic control on rotor performance[J]. Journal of the American Helicopter Society, 2003, 48(1): 18-27.
[28] CHENG R P, CELI R. Optimum two-per-revolution inputs for improved rotor performance[J]. Journal of Aircraft, 2005, 42(6): 1409-1417.
[29] NORMAN T R, THEODORE C, SHINODA P, et al. Full-scale wind tunnel test of a UH-60 individual blade control system for performance improvement and vibration, loads, and noise control[C]∥The American Helicopter Society 65th Annual Forum. Fairfax, VA: American Helicopter Society, 2009.
[30] YEO H, ROMANDER E A, NORMAN T R. Investigation of rotor performance and loads of a UH-60A individual blade control system[J]. Journal of the American Helicopter Society, 2011, 56(4): 042006.
[31] KESSLER Ch. Active rotor control for helicopters: Individual blade control and swashplateless rotor design[J]. CEAS Aeronautical Journal, 2011(1): 23-54.
[32] GESSOW A. Flight investigation of effects of rotor-blade twist on helicopter performance in the high-speed and vertical-autorotative-descent conditions: Technical Report NACA 1666[R].Washington, D.C.: NACA, 1948.
[33] CHEN P, CHOPRA I. Hover testing of smart rotor with induced-strain actuation of blade twist[J]. AIAA Journal, 1997, 35(1): 6-16.
[34] CHEN P, CHOPRA I. Wind tunnel test of a smart rotor model with individual blade twist control[J]. Journal of Intelligent Material System and Structures, 1997, 8(5): 414-425.
[35] WILBUR M L, YEAGER P H, LANGSTON C W. Vibratory loads reduction testing of the NASA/Army/MIT active twist rotor[J]. Journal of the American Helicopter Society, 2002, 47(2): 123-133.
[36] SHIN S, CESNIK C E S, HALL S R. Closed-loop test of the NASA/Army/MIT active twist rotor for vibration reduction[J]. Journal of the American Helicopter Society, 2005, 50(2): 178-194.
[37] BERNHARD A P F, WONG J. Wind-tunnel evaluation of a Sikorsky active rotor controller implemented on the NASA/ARMY/MIT active twist rotor[J]. Journal of the American Helicopter Society, 2005, 50(1): 65-81.
[38] MONNER H P, OPITZ S, RIEMENSCHNEIDER J, et al. Evolution of active twist rotor design at DLR[C]∥49th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Reston, VA: AIAA, 2008: 216-223.
[39] MONNER H P, RIEMENSCHNEIDER J, OPITZ S, et al. Development of active twist rotors at the German aerospace center (DLR)[C]∥52th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. Reston, VA: AIAA, 2011: 1-11.
[40] RIEMENSCHNEIDER J, OPITZ S. Measurement of twist deflection in active twist rotor[J]. Aerospace Science and Technology, 2011, 15(3): 216-223.
[41] ZHANG Q, HOFFMANN F, VAN DER WALL B G. Benefit studies for rotor with active twist control using weak fluid-structure coupling[C]∥35th European Rotorcraft Forum. Bonn: German Society for Aeronautics and Astronautics, 2009.
[42] BOYD D D, JR. Initial aerodynamic and acoustic study of an active twist rotor using a loosely coupled CFD/CSD method[C]∥35th European Rotorcraft Forum. Bonn: German Society for Aeronautics and Astronautics, 2009: 446-457.
[43] JAIN R, YEO H, CHOPRA I. Computational fluid dynamics-computational structural dynamics analysis of active control of helicopter rotor for performance improvement[J]. Journal of the American Helicopter Society, 2010, 55(4): 0420041-04200414.
[44] JAIN R, YEO H, CHOPRA I. Examination of rotor loads due to on-blade active controls for performance improvement[J]. Journal of Aircraft, 2010, 47(6): 2049-2066.
[45] HAN D, PASTRIKAKIS V, BARAKOS G N. Helicopter flight performance improvement by dynamic blade twist[J]. Aerospace Science and Technology, 2016, 58(1): 445-452.
[46] BERNHARD A P F, CHOPRA I. Analysis of a bending-torsion coupled actuator for a smart rotor with active blade tips[J]. Smart Materials and Structures, 2001, 10(1): 35-52.
[47] BERNHARD A P F, CHOPRA I. Hover test of a mach-scale rotor model with active blade tips[J]. Journal of the American Helicopter Society, 2002, 39(4): 273-284.
[48] BANGLORE A, SANKAR L N. Numerical analysis of aerodynamic performance of rotors with leading edge slats[J]. Computational Mechanics, 1996, 17(5): 335-342.
[49] BANGLORE A, SANKAR L N. Forward-flight analysis of slatted rotors using Navier-Stokes methods[J]. Journal of Aircraft, 1997, 34(1): 80-86.
[50] YEO H, LIM J W. Application of a slotted airfoil for UH-60A helicopter performance[C]∥The American Helicopter Society Aerodynamics, Acoustics, and Test and Evaluation Technical Specialist Meeting. Fairfax, VA: American Helicopter Society, 2002: 1-17.
[51] LORBER P E, BAGAI A, WAKE B E. Design and evaluation of slatted airfoils for improved rotor performance[C]∥The American Helicopter Society 62nd Annual Forum. Fairfax, VA: American Helicopter Society, 2006: 87-105.
[52] MISHRA A, BAEDER M. Coupled aeroelastic prediction of the effects of leading-edge slat on rotor performance[J]. Journal of Aircraft, 2016, 53(1): 141-157.
[53] LIU L, FRIEDMANN P P, KIM I, et al. Rotor performance enhancement and vibration reduction in presence of dynamic stall using actively controlled flaps[J]. Journal of the American Helicopter Society, 2008, 53(4): 338-350.
[54] STRAUB F K, ANAND V R, BIRCHETTE T S, et al. Smart rotor development and wind tunnel test[C]∥The 35th European Rotorcraft Forum. Bonn: German Society for Aeronautics and Astronautics, 2009: 413-430.
[55] POSTDAM M, FULTON M V, DIMANLIG A. Multidisciplinary CFD/CSD analysis of the smart active flap rotor[C]∥The American Helicopter Society 66th Annual Forum. Fairfax, VA: American Helicopter Society, 2010: 1756-1777.
[56] RAVICHANDRAN K, CHOPRA I, WAKE B E, et al. Trailing-edge flaps for rotor performance and vibration reduction[J]. Journal of the American Helicopter Society, 2013, 58(2): 0220061-02200613.
[57] JAIN R, YEO H. Effects of torsion frequencies on rotor performance and structural loads with trailing edge flap[J]. Smart Materials and Structures, 2012, 21(8): 085026 .
[58] LORBER P, HEIN B, WONG J. Rotor aeromechanics results from the Sikorsky active flap demonstration rotor[C]∥American Helicopter Society 68th Annual Forum. Fairfax, VA: American Helicopter Society, 2012: 553-568.
[59] JAIN R, YEO H, CHOPRA I. Investigation of trailing-edge flap gap effects on rotor performance using high-fidelity analysis[J]. Journal of Aircraft, 2013, 50(1): 140-151.
[60] KODY F, MAUGHMER M D, SCHMITZ S. Non-harmonic deployment of active devices for rotor performance enhancement[C]∥American Helicopter Society 69th Annual Forum. Fairfax, VA: American Helicopter Society, 2013: 2215-2227.
[61] KODY F, CORLE B, MAUGHMER M D, et al. Higher-harmonic deployment of trailing-edge flaps for rotor performance enhancement and vibration reduction[J]. Journal of Aircraft, 2016, 53(2): 333-342.
[62] WANG C, LU W. Study on performance enhancement of electrically controlled rotor using 2/rev flap control[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2014, 228(12): 2237-2244.
[63] ROTH D, ENENKL B, DIETERICH O. Active rotor control by flaps for vibration reduction—Full scale demonstrator and first flight test results[C]∥The 32th European Rotorcraft Forum. Bonn: German Society for Aeronautics and Astronautics, 2006: 801-814.
[64] LIEBECK R H. Design of subsonic airfoils for high lift[J]. Journal of Aircraft, 1979, 15(9): 547-561.
[65] WANG J J, Li Y C, CHOI K S. Gurney flap-Lift enhancement, mechanisms and applications[J]. Progress in Aerospace Science, 2008, 44: 22-47.
[66] KENTFIELD J A C. The potential of gurney flaps for improving the aerodynamic performance of helicopter rotors[C]∥International Powered Lift Conference. Reston, VA: AIAA, 1993: 293-292.
[67] NELSON J M, KORATKAR N A. Micro-rotorcraft performance improvement using trailing-edge gurney flaps[C]∥The American Helicopter Society 60th Annual Forum. Fairfax, VA: American Helicopter Society, 2004: 73-87.
[68] KINZEL M P, MAUGHMER M D, LESIEUTRE G A. Miniature trailing-edge effectors for rotorcraft performance enhancement[J]. Journal of the American Helicopter Society, 2007, 51(2): 146-158.
[69] BAE E S, GANDHI F, MAUGHMER D. Optimally scheduled deployments of miniature trailing-edge effectors for rotorcraft power reduction[C]∥The American Helicopter Society 65th Annual Forum. Fairfax, VA: American Helicopter Society, 2009: 71-95.
[70] BAE E S, GANDHI F. Rotor stall alleviation with active gurney flap[C]∥The American Helicopter Society 69th Annual Forum. Fairfax, VA: American Helicopter Society, 2013: 2285-2298.
[71] PASTRIKAKIS V A, STEIJI R, BARAKOS G N. Effect of active Gurney flaps on overall helicopter flight envelope[J]. The Aeronautical Journal, 2016, 120(1230): 1230-1261.
[72] PALACIOS J, KINZEL M, OVERMEYER A. Active gurney flaps: Their application in a rotor blade centrifugal field[J]. Journal of Aircraft, 2014, 51(2): 473-489.
[73] LéON O, HAYDEN E, GANDHI F. Rotorcraft operating envelope expansion using extendable chord sections[C]∥The American Helicopter Society 65th Annual Forum. Fairfax, VA: American Helicopter Society, 2009: 1940-1953.
[74] KHOSHLAHJEH M, GANDHI F. Extendable chord rotors for helicopter envelope expansion and performance improvement[J]. Journal of the American Helicopter Society, 2014, 59(1): 0120071-01200710.
[75] KUMAR D, CESNIK C E S. Performance enhancement and vibration reduction in dynamic stall condition using active camber deformation[J]. Journal of the American Helicopter Society, 2015, 60(2): 022001.
[76] YEO H. Assessment of active control for rotor performance enhancement[J]. Journal of the American Helicopter Society, 2008, 53(2): 152-163.
[77] 韓東. 變轉速旋翼直升機性能及配平研究[J]. 航空學報, 2013, 34(6): 1241-1248.
HAN D. Study on the performance and trim of helicopters with variable speed rotors[J]. Acta Aeronoutica et Astronautica Sinica, 2013, 34(6): 1241-1248 (in Chinese).
[78] 徐明, 韓東, 李建波. 變轉速旋翼氣動特性分析及試驗研究[J]. 航空學報, 2013, 34(9): 2047-2056.
XU M, HAN D, LI J B. Analysis and experimental investigation on the aerodynamic characteristics of variable speed rotor[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34 (9): 2047-2056 (in Chinese).
[79] 徐明, 李建波, 韓東. 轉速優化旋翼的槳葉氣動外形參數優化研究[J]. 航空學報, 2015, 36(7): 2133-2144.
XU M, LI J B, HAN D. Optimal design for aerodynamic shape parameters of optimum speed rotor[J]. Acta Aeronautica et Astronautica, 2015, 36(7): 2133-2144 (in Chinese).
[80] 劉士明, 楊衛東, 董凌華, 等. 優化轉速旋翼性能分析與應用[J]. 南京航空航天大學學報, 2014, 46(6): 888-894.
LIU S M, YANG W D, DONG L H, et al. Performance investigation and applications of optimum speed rotors[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2014, 46(6): 888-894 (in Chinese).
[81] 薛立鵬, 邵松, 張呈林. 變直徑傾轉旋翼設計研究[J]. 機械科學與技術, 2008, 27(10): 1202-1206.
XUE L P, SHAO S, ZHANG C L. Design of a variable diameter tilt-rotor[J]. Mechanical Science and Technology for Aerospace Engineering, 2008, 27(10): 1202-1206 (in Chinese).
[82] 韓東, 張勇剛, 黃東盛. 變直徑旋翼直升機飛行性能研究[J]. 南京航空航天大學學報, 2015, 47(2): 252-258.
HAN D, ZHANG Y G, HUANG D S. Helicopter flight performance improvement by variable rotor diameter[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2015, 47(2): 252-258 (in Chinese).
[83] 王超, 陸洋, 陳仁良. 直升機槳距主動控制對旋翼性能的影響[J]. 航空動力學報, 2014, 29(8): 1922-1929.
WANG C, LU Y, CHEN R L. Effect of active blade pitch control on helicopter rotor performance[J]. Journal of Aerospace Power, 2014, 29(8): 1922-1929 (in Chinese).
[84] 崔釗, 韓東, 李建波, 等. 加裝格尼襟翼的自轉旋翼氣動特性研究[J]. 航空學報, 2012, 33(10): 1791-1799.
CUI Z, HAN D, LI J B, et al. Study on aerodynamic characteristics of auto-rotating rotors with Gurney flaps[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(10): 1791-1799 (in Chinese).
[85] 張勇剛, 崔釗, 韓東, 等. 加裝格尼襟翼旋翼的直升機飛行性能[J]. 航空學報, 2016, 37(7): 2208-2217.
ZHANG Y G, CUI Z, HAN D, et al. Flight performance of helicopter rotors with Gurney flaps[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(7): 2208-2217 (in Chinese).
[86] 韓東, 林長亮, 李建波. 旋翼變體技術對直升機性能的提升研究[J]. 航空動力學報, 2014, 29(9): 2017-2023.
HAN D, LIN C L, LI J B. Helicopter performance improvement by rotor morphing technologies[J]. Journal of Aerospace Power, 2014, 29(9): 2017-2023 (in Chinese).
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19