基于ESO的DGVSCMG雙框架伺服系統(tǒng)不匹配擾動抑制
2018-04-27 09:54:07李海濤林杰韓邦成
航空學(xué)報 2018年4期
李海濤,林杰,韓邦成
1.北京航空航天大學(xué) 儀器科學(xué)與光電工程學(xué)院,北京 100083 2.北京航空航天大學(xué) 新型慣性儀表與導(dǎo)航系統(tǒng)技術(shù)國防重點學(xué)科實驗室,北京 100083
控制力矩陀螺(Control Moment Gyroscope, CMG)和飛輪是目前航天器進(jìn)行姿態(tài)控制的兩種主要的慣性執(zhí)行機(jī)構(gòu)。飛輪輸出力矩小但精度高,主要用于航天器姿態(tài)穩(wěn)定。CMG輸出力矩大,一般用于航天器的姿態(tài)機(jī)動[1-2]。CMG按結(jié)構(gòu)可分為單框架CMG和雙框架CMG。雙框架CMG可輸出兩個自由度的力矩,相比單框架CMG具有使用個數(shù)少、奇異問題不明顯等優(yōu)點。雙框架變速率控制力矩陀螺(Double Gimbaled Variable Speed Control Moment Gyroscope,DGVSCMG)既能工作于飛輪模式,又能工作于CMG模式[3]。當(dāng)高速轉(zhuǎn)子的轉(zhuǎn)速改變時,DGVSCMG工作在飛輪模式,可輸出高精度力矩;當(dāng)高速轉(zhuǎn)子的轉(zhuǎn)速恒定時,DGVSCMG工作在CMG模式,可輸出大力矩。而兩種工作模式下框架伺服系統(tǒng)的精確控制是保證DGVSCMG高精度姿態(tài)控制的重要前提。
在飛輪模式下,內(nèi)、外框架需要保證零速率鎖定。當(dāng)內(nèi)框架角位置與定義的零位存在偏差且高速轉(zhuǎn)子加減速時,其角動量的變化量會直接對外框架產(chǎn)生干擾力矩。此干擾通過外框架-內(nèi)框架-轉(zhuǎn)子三體之間的耦合作用傳遞給整個系統(tǒng),進(jìn)而影響飛輪模式下的DGVSCMG性能[4]。同樣,在陀螺模式下時,當(dāng)框架轉(zhuǎn)動,內(nèi)、外框架系統(tǒng)受到的陀螺耦合力矩、摩擦力矩、牽連力矩、系統(tǒng)參數(shù)不確定性等干擾,嚴(yán)重影響框架系統(tǒng)的角速率輸出精度,從而影響CMG的輸出力矩精度[5]。
針對雙框架系統(tǒng)干擾抑制問題,研究者提出過很多方法。文獻(xiàn)[6]采用加速度反饋的擾動抑制方法,但提取加速度時會不可避免地引入噪聲;文獻(xiàn)[7]從系統(tǒng)傳遞函數(shù)角度,采用前饋加反饋的復(fù)合控制提高控制精度;文獻(xiàn)[8]用CMG的實際參數(shù)和實驗采集數(shù)據(jù)對摩擦力矩模型參數(shù)進(jìn)行了遺忘因子遞推最小二乘法辨識,計算量較大;文獻(xiàn)[9]和文獻(xiàn)[10]采用基于模態(tài)分離的反饋線性化方法來提高控制精度;文獻(xiàn)[11]中利用前饋的控制方法對干擾進(jìn)行抑制。上述方法均實現(xiàn)了對框架系統(tǒng)中的某一類干擾的抑制,但沒有對框架系統(tǒng)在DGVSCMG兩種模式下的干擾進(jìn)行總體分析,同時也沒有考慮不匹配干擾的抑制問題。
擴(kuò)張狀態(tài)觀測器(Extended State Observer,ESO)是最早由韓京清教授提出的一種干擾估計方法,此方法不依賴于系統(tǒng)具體的數(shù)學(xué)模型,它將影響被控對象輸出的擾動擴(kuò)展成新的狀態(tài)變量并實時估計,因而可避免數(shù)學(xué)建模不準(zhǔn)確而帶來的諸多問題[12-13]。基于ESO的控制方法在工程中有廣泛應(yīng)用,如電機(jī)控制、機(jī)器人控制、飛艇軌跡控制等領(lǐng)域[14-16]。在本文中,CMG框架系統(tǒng)的耦合力矩可以通過計算得出,但是耦合到內(nèi)外框架的干擾除了耦合力矩外還有摩擦力矩、牽連力矩、未建模動態(tài)等。利用ESO可以將這些系統(tǒng)參數(shù)不確定性帶來的干擾進(jìn)行估計補(bǔ)償,相對于利用前饋、反饋等傳統(tǒng)控制方法而言,解決了由于未建模誤差帶來的影響。傳統(tǒng)的ESO設(shè)計需要系統(tǒng)滿足積分串聯(lián)形式[17]且綜合擾動與系統(tǒng)的輸入要在一個通道上[18]。CMG框架系統(tǒng)的狀態(tài)方程并不嚴(yán)格滿足積分串聯(lián)形式,且有部分?jǐn)_動項與控制輸入不在同一通道上,因此屬于一種不匹配擾動形式。本文針對雙框架伺服系統(tǒng)不匹配干擾抑制問題,提出了一種ESO設(shè)計方法與控制手段。
首先設(shè)計了含有不匹配干擾的ESO,其次通過構(gòu)造一個新的坐標(biāo)變換,對系統(tǒng)的不匹配干擾進(jìn)行轉(zhuǎn)化,最后利用狀態(tài)反饋與ESO結(jié)合的控制方法對干擾進(jìn)行抑制,并對全局系統(tǒng)穩(wěn)定性進(jìn)行了分析。仿真與實驗結(jié)果證明了該方法的有效性。
1 DGVSCMG雙框架動力學(xué)模型與系統(tǒng)干擾分析
1.1 雙框架伺服系統(tǒng)數(shù)學(xué)模型
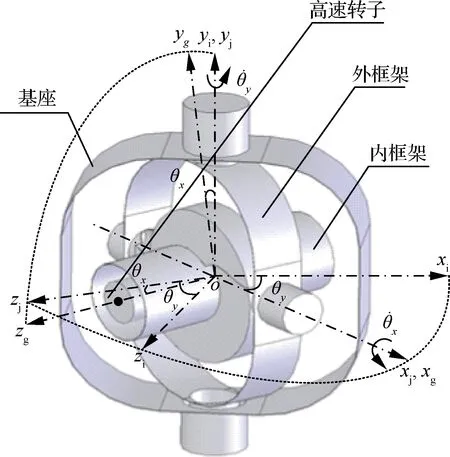
圖1 DGVSCMG坐標(biāo)定義Fig.1 Definition of coordinate system of DGVSCMG

根據(jù)文獻(xiàn)[19]可以推導(dǎo)得到的DGVSCMG內(nèi)、外框架伺服系統(tǒng)的簡化模型為
(1)

(2)
式中:ix和iy分別為內(nèi)、外框電機(jī)繞組電流;kTx和kTy為電機(jī)的力矩系數(shù);Rx和Ry為內(nèi)、外框等效電阻;Lx和Ly為電感值;kex和key為內(nèi)、外框的反電動勢系數(shù);u1和u2為控制輸入電壓量。
(3)

1.2 雙框架伺服系統(tǒng)模型干擾分析

由文獻(xiàn)[5]可知,衛(wèi)星運動引起的牽連力矩是與衛(wèi)星運動的角速度、框架角位置及高速轉(zhuǎn)子角動量有關(guān)的非線性項,且衛(wèi)星運動速度的大小及方向信息無法實時測得,因而將衛(wèi)星運動引起的牽連力矩看作是慢變的未知擾動力矩。由式(3)也可知,內(nèi)、外框架系統(tǒng)的干擾與輸入不在一個通道上,不能直接從控制輸入通道進(jìn)行補(bǔ)償,產(chǎn)生了不匹配干擾問題。
2 基于ESO的雙框架伺服系統(tǒng)干擾抑制控制器設(shè)計
2.1 不匹配干擾的ESO設(shè)計
傳統(tǒng)的ESO針對的系統(tǒng)形式為[18]
(4)
式中:b為系統(tǒng)參數(shù)。由式(4)可知,此類系統(tǒng)中的系統(tǒng)干擾量ω(t)與控制輸入量u在一個通道上,為匹配干擾的抑制問題,通過觀測器得到的干擾估計值可直接通過系統(tǒng)輸入進(jìn)行補(bǔ)償。此類型系統(tǒng)的擴(kuò)張狀態(tài)器設(shè)計為
(5)

從式(3)可知,將內(nèi)、外框架的耦合力矩、轉(zhuǎn)子加速度引起的外框架干擾力矩、參數(shù)擾動等視為系統(tǒng)的總體外部干擾,原系統(tǒng)可解耦為內(nèi)、外框架兩個子系統(tǒng)。為簡化公式,本節(jié)擴(kuò)張狀態(tài)觀測器以及控制器設(shè)計均以內(nèi)框架為例。原內(nèi)框架系統(tǒng)表述為
(6)
(7)
(8)
式中:e=z-q為狀態(tài)誤差,L=[β1β2β3β4]T為觀測器增益參數(shù),C=[1 0 0 0]為系統(tǒng)輸出矩陣,z為對應(yīng)q的估計量。由此得到觀測器誤差方程為
(9)
內(nèi)框架全局系統(tǒng)狀態(tài)方程可表述為

(10)
2.2 復(fù)合控制器設(shè)計
由式(8)可知,ESO對內(nèi)框架的干擾量及一階導(dǎo)數(shù)進(jìn)行了估計,但系統(tǒng)存在不匹配干擾,干擾量不能直接通過輸入通道進(jìn)行補(bǔ)償。本文通過坐標(biāo)變換對不匹配干擾量進(jìn)行轉(zhuǎn)換,然后結(jié)合ESO輸出的干擾項及其一階導(dǎo)數(shù)估計值和狀態(tài)反饋進(jìn)行復(fù)合控制。對式(3)采取坐標(biāo)變換:
(11)

(12)

(13)

(14)

(15)
由式(15)可知,為使系統(tǒng)實現(xiàn)速率跟蹤,則控制器參數(shù)kr=-(k1-kex),同時k1和k2的選取滿足使系統(tǒng)矩陣赫爾維茨穩(wěn)定,L的選取也應(yīng)使得觀測器輸出與實際值的誤差快速收斂。
2.3 穩(wěn)定性分析
將控制輸入式(13)代入經(jīng)過坐標(biāo)變換處理后的全局系統(tǒng),得到:

(16)
(17)
由式(17)可知,系統(tǒng)的抗擾能力與ESO參數(shù)設(shè)計有關(guān),在保證穩(wěn)定前提下,應(yīng)使β1/β4、β2/β4盡量小。同時實際參數(shù)選擇還要滿足:觀測器的帶寬應(yīng)比控制器的帶寬高2~5倍,而觀測器帶寬應(yīng)低于控制系統(tǒng)采樣頻率的5~10倍[1]。
3 仿真驗證
為了驗證所提出的復(fù)合控制方法應(yīng)用在DGVSCMG中的雙框架伺服系統(tǒng)中時的穩(wěn)定性以及抑制干擾性能,本文根據(jù)框架伺服系統(tǒng)動力學(xué)模型,搭建了基于Simulink的系統(tǒng)仿真模型,并在仿真中與傳統(tǒng)控制方法[20]進(jìn)行了對比。DGVSCMG系統(tǒng)設(shè)計參數(shù)如表1所示。根據(jù)狀態(tài)反饋極點配置及參考文獻(xiàn) [21],仿真時,復(fù)合控制器參數(shù)設(shè)定為,k1=-4.602 1、k2=3.5、β1=251.33、β2=23 687.05、β3=9.92×105、β4=1.56×107。

表1 框架伺服系統(tǒng)仿真參數(shù)Table 1 Simulation parameters of gimbal servo system
3.1 飛輪模式對比仿真結(jié)果
飛輪模式下,仿真條件為內(nèi)框架初始位置給定為10°,內(nèi)、外框架速率參考給定為0(°)/s,高速轉(zhuǎn)子在1 s時由4 000 r/min開始升速,利用傳統(tǒng)控制方法以及本文提出的復(fù)合控制方法分別得到了雙框架速率曲線如圖2所示。
可以看出,在1 s時,轉(zhuǎn)子升速會對外框架產(chǎn)生擾動量,使外框架速率產(chǎn)生波動,并通過兩框架的耦合將速率波動傳給內(nèi)框架。由圖2可知,兩種方法均能抑制飛輪模式下框架受到的干擾,但通過對比可知,本文所提出的方法在1 s時的速率跳動量約為傳統(tǒng)控制方法仿真結(jié)果的50%,提高了零速率伺服精度,使框架系統(tǒng)具有更好的抗擾能力。

圖2 飛輪模式下框架角速率Fig.2 Gimbal angular rate in flywheel mode
3.2 陀螺模式對比仿真結(jié)果
CMG模式下,為了體現(xiàn)所提出復(fù)合控制方法對陀螺耦合力矩的抑制效果,仿真條件設(shè)定為:轉(zhuǎn)子轉(zhuǎn)速8 000 r/min,內(nèi)、外框架初始角速率為0(°)/s,在0.2 s時內(nèi)框給定一個幅值為5(°)/s,頻率為3 Hz的正弦指令,而外框架的給定速率為0(°)/s。由于由衛(wèi)星運動引起的牽連力矩是一個慢變的未知擾動力矩,在此用外加頻率為1 Hz、幅值為0.02 N·m的擾動代替。在上述仿真條件下,利用傳統(tǒng)控制方法以及所提出的復(fù)合控制方法分別得到了框架速率曲線如圖3所示。
圖3仿真結(jié)果表明,兩種控制方法對干擾均有一定的抑制效果,且本文方法能夠進(jìn)一步降低陀螺模式下耦合干擾力矩對框架速率伺服性能的影響,使得外框架速率最大跳動量從0.25(°)/s降低到0.07(°)/s,減小了70%。同時,由圖4可知本文所提出的不匹配干擾ESO具有較好的跟蹤實際干擾的效果,使系統(tǒng)具有更好的干擾抑制能力。

圖3 陀螺模式下框架角速率Fig.3 Gimbal angular rate in CMG mode

圖4 利用本文方法得到的外框架干擾估計Fig.4 Disturbance estimation of outer gimbal using proposed method
4 實驗驗證
為驗證所設(shè)計的復(fù)合控制器在雙框架系統(tǒng)不匹配干擾抑制方面的有效性,以北京航空航天大學(xué)新型慣性儀表與導(dǎo)航系統(tǒng)技術(shù)國防重點學(xué)科實驗室所研制的某型號DGVSCMG系統(tǒng)為對象進(jìn)行實驗研究,實驗裝置如圖5所示。
實驗基于DSP(TMS320C6701)和FPGA(A3P125)的數(shù)字控制系統(tǒng),分別采用傳統(tǒng)控制方法和本文所提出的方法對框架系統(tǒng)在飛輪模式和陀螺模式下進(jìn)行了對比實驗。
飛輪模式下實驗條件為:內(nèi)框架初始位置給定為10°,內(nèi)外框架速率參考給定為0(°)/s,高速轉(zhuǎn)子在1 s時由4 000 r/min開始升速。
飛輪工作模式下兩種方法得到的內(nèi)外框架速率曲線如圖6所示。由圖可知,本文提出方法能有效減小高速轉(zhuǎn)子加減速對內(nèi)外框架速率產(chǎn)生的擾動,使得內(nèi)框架速率最大跳動量從0.14(°)/s減小到0.02(°)/s,使得外框架速率最大跳動量從0.18(°)/s減小到約為0.04(°)/s。
CMG模式下實驗條件為:轉(zhuǎn)子8 000 r/min的情況下,內(nèi)框架給定一個幅值為5(°)/s,頻率為3 Hz的正弦指令,而外框架的給定速度為0(°)/s。比較兩種方法下外框架速率的跟蹤性能,可以看到用傳統(tǒng)控制方法時外框架產(chǎn)生了0.2(°)/s的速率波動,采用本文的控制方法,速率波動為0.05(°)/s,如圖7所示。

圖5 DGVSCMG實驗裝置Fig.5 DGVSCMG experimental installations
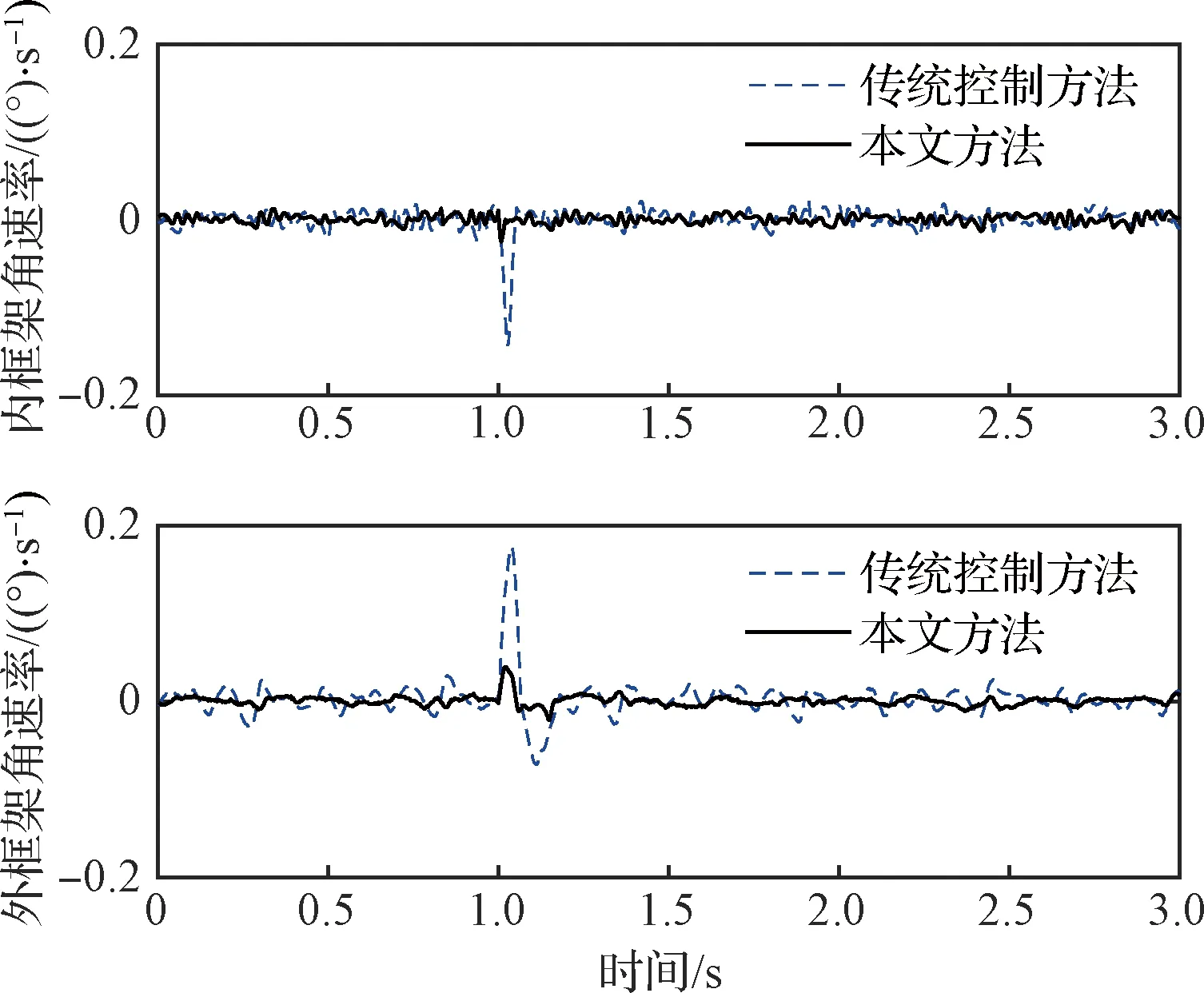
圖6 飛輪模式下的性能對比Fig.6 Comparison of performance in flywheel model

圖7 陀螺模式下的性能對比Fig.7 Comparison of performance in CMG model
5 結(jié) 論
1) DGVSCMG框架伺服系統(tǒng)是一個雙輸入雙輸出、多變量、強(qiáng)耦合且擾動不匹配的復(fù)雜系統(tǒng)。為實現(xiàn)框架系統(tǒng)的高精度角速率輸出,針對兩種模式下的不匹配干擾抑制問題,本文提出一種基于ESO和狀態(tài)反饋的復(fù)合控制方法。
2) 仿真和實驗結(jié)果表明:所提出的復(fù)合控制方法在飛輪模式和陀螺模式下,可進(jìn)一步提高框架系統(tǒng)零速率伺服精度,使得速率跳動量降低,有效抑制框架耦合力矩對速率精度的影響,實現(xiàn)了框架系統(tǒng)的高精度控制。
[1] 房建成, 孫津濟(jì), 樊亞洪. 磁懸浮慣性動量輪技術(shù)[M]. 北京: 國防工業(yè)出版社, 2012: 15-26.
FANG J C, SUN J J, FAN Y H. Magnetically suspended inertia momentum wheel technology[M]. Beijing:National Defense Industry Press, 2012: 15-26 (in Chinese).
[2] 房建成, 任元. 磁懸浮控制力矩陀螺技術(shù)[M]. 北京: 國防工業(yè)出版社, 2014: 1-17.
FANG J C, REN Y. Magnetically suspended control moment gyroscope technology[M]. Beijing:National Defense Industry Press, 2014: 1-17 (in Chinese).
[3] 陳璐, 袁建平. 基于雙框架變速控制力矩陀螺的航天器姿態(tài)控制研究[J]. 電子設(shè)計工程, 2014, 22(23):114-117.
CHEN L, YUAN J P. Spacecraft attitude control based on a double-gimbal variable-speed control moment gyroscope[J]. Electronic Design Engineering, 2014, 22(23):114-117 (in Chinese).
[4] 寧欣, 韓邦成, 房建成. 基于干擾觀測器的雙框架變速率控制力矩陀螺解耦控制[J]. 機(jī)械工程學(xué)報, 2017, 53(10): 53-59.
NING X, HAN B C, FANG J C. Disturbance observer based decoupling method of double-gimbaled variable speed control moment gyroscope[J]. Journal of Mechanical Engineering. 2017, 53(10): 53-59 (in Chinese).
[5] 崔培玲, 楊珊, 李海濤. 雙框架MSCMG框架伺服系統(tǒng)的動力學(xué)解耦及擾動補(bǔ)償[J]. 航空學(xué)報, 2016, 37(3): 916-927.
CUI P L, YANG S, LI H T. Dynamic decoupling control and disturbance compensation of gimbal servo system of double gimbal MSCMG[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(3): 916-927 (in Chinese).
[6] 李海濤, 房建成, 韓邦成, 等. 一種雙框架磁懸浮控制力矩陀螺框架伺服系統(tǒng)擾動抑制方法研究[J]. 宇航學(xué)報, 2009, 30(6): 2199-2205.
LI H T, FANG J C, HAN B C, et al. Study on the system disturbance rejection method used in the gimbal servo system of double gimbal magnetically suspended control moment gyro[J]. Journal of Astronautics, 2009, 30(6): 2199-2205 (in Chinese).
[7] 徐向波, 房建成, 楊蓮慧. 控制力矩陀螺框架系統(tǒng)高精度復(fù)合控制研究[J]. 載人航天, 2012, 18(5): 19-23.
XU X B, FANG J C, YANG L H. Study on high precision control of CMG gimbal system[J]. Manned Spaceflight, 2012, 18(5): 19-23 (in Chinese).
[8] 李紅, 杭影, 韓邦成, 等. DGCMG框架伺服系統(tǒng)摩擦力矩建模及辨識[J]. 振動、測試與診斷, 2014, 34(6): 1001-1007.
LI H, HANG Y, HAN B C. et al. Analysis of friction torque model of DGCMG gimbal servo system with its identification[J]. Journal of Vibration, Measurement & Diagnosis, 2014, 34(6): 1001-1007 (in Chinese).
[9] SU D, XU S. The precise control of a double gimbal MSCMG based on modal separation and feedback linearization[C]∥International Conference on Electrical Machines and Systems. 2013: 1355-1360.
[10] CHEN X C, REN Y. Modal decoupling control for a double gimbal magnetically suspended control moment gyroscope based on modal controller and feedback linearization method[J]. Proc IMechE Part C: Journal of Mechanical Engineering Science, 2014, 228(13): 2303-2313.
[11] 李延寶, 李結(jié)凍, 孫宏麗, 等. 磁懸浮力矩陀螺內(nèi)外框架低速高精度控制技術(shù)研究[J]. 上海航天, 2015, 32(5): 20-25.
LI Y B, LI J D, SUN H L, et al. Study on high precision control of low speed magnetically suspended control moment gyroscope for inside and outside gimbal[J]. Aerospace Shanghai, 2015, 32(5): 20-25 (in Chinese).
[12] RADKE A, GAO Z Q. A survey of state and disturbance observers for practitioners[C]∥American Control Conference. Piscataway, NJ: IEEE Press, 2006.
[13] HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906.
[14] LI S H, LIU Z G. Adaptive speed control for permanent-magnet synchronous motor system with variations of load inertia[J]. IEEE Transactions on Industrial Electronics, 2009, 56(8): 3050-3059.
[15] ZHU E, PANG J, SUN N, et al. Airship horizontal trajectory tracking control based on Active Disturbance Rejection Control (ADRC)[J]. Nonlinear Dynamics, 2014, 75(4): 725-734.
[16] SHI R, SONG J, WAN W. Active disturbance rejection control system design for a morphing wing structure[J]. Asian Journal of Control, 2014, 17(3): 832-841.
[17] 韓京清, 張榮. 二階擴(kuò)張狀態(tài)觀測器的誤差分析[J]. 系統(tǒng)科學(xué)與數(shù)學(xué), 1999(4): 465-471.
HAN J Q, ZHANG R. Error analysis of second order ESO[J]. Journal of System Science and Math Science, 1999(4): 465-471 (in Chinese).
[18] LI S H, YANG J, CHEN W H, et al. Generalized extended state observer based control for systems with mismatched uncertainties[J]. IEEE Transactions on Industrial Electronics, 2012, 59(12): 4792-4802.
[19] LI H T, NING X, HAN B C. Composite decoupling control of gimbal servo system in double-gimbaled variable speed CMG via disturbance observer[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 312-320.
[20] 魏彤, 房建成, 劉珠榮. 雙框架磁懸浮控制力矩陀螺動框架效應(yīng)補(bǔ)償方法[J]. 機(jī)械工程學(xué)報, 2010, 46(2): 159-165.
WEI T, FANG J C, LIU Z R. Moving-gimbal effects compensation of double gimbal magnetically suspended control moment gyroscope based on compound control[J]. Journal of Mechanical Engineering, 2010, 46(2): 159-165 (in Chinese).
[21] GAO Z. Scaling and bandwidth-parameterization based controller tuning[C]∥Proceedings of the American Control Conference. Piscataway, NJ: IEEE Press, 2003: 4989-4996.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12