基于任務的硬式加油伸縮管操縱品質研究
2018-04-27 09:52:22曹華姿郭有光王立新
航空學報 2018年4期
曹華姿,郭有光,王立新
北京航空航天大學 航空科學與工程學院,北京 100083
空中加油是一項延長飛機執行任務時間,增加飛機航程的技術[1],目前空中加油分為兩種形式,即軟式加油[2]和硬式加油[3]。伸縮管是硬式空中加油任務的重要設備,在硬式加油過程中由操縱員操縱伸縮管完成與受油機的對接[4]。該過程對伸縮管姿態操縱精度以及快速性的要求極高,因此伸縮管必須具有良好的操縱品質。然而,目前國內外關于伸縮管操縱品質的要求以及評定的方法研究較少,尚無系統且成熟的理論結果,因此對伸縮管的操縱品質評定方法和操縱品質要求進行研究具有十分重要的意義。
某些學者仍沿用飛機的飛行品質評定準則來評定伸縮管的操縱品質[5]。由于伸縮管在構型與慣性特性、受力特性、運動方式(受萬向節約束僅能相對萬向節偏航和俯仰運動)、操縱員不能感受伸縮管的運動過載等方面均與飛機存在較大的區別,使得二者的運動特性差異較大。而常規飛機飛行品質評定方法利用了飛機在這些方面的規律,若直接采用飛機的飛行品質研究方法,顯然難以滿足伸縮管的設計要求。因此,本文提出了采用基于任務的評定方法對伸縮管的操縱品質進行評定并完成對伸縮管操縱品質要求的研究。
所謂基于任務的評定方法是指操縱員通過完成特定的評定任務對伸縮管在完成加油任務中的操縱品質進行評定[6]。20世紀90年代初,美國空軍萊特實驗室最早開展了基于飛行任務的飛行品質評定新方法的研究[7-9],較詳細地介紹了這些機動動作的選取原則、方法。相對于常規飛行品質評定方法,基于任務的飛行品質評定方法具有任務針對性和包線適應性。文獻[10-11]利用基于任務的評定方法將控制律設計和飛行品質結合起來,研究了控制律設計與飛行品質之間的關系。
本文先對硬式加油伸縮管的運動模型以及本體特性進行介紹與分析。為了解決研究樣本較少的問題,引入了可改變閉環響應特性的伸縮管控制器,通過改變該控制器的參考模型參數獲得了不同閉環響應特性的研究樣本[6]。然后,本文依據要求設計了操縱品質任務試驗以及任務評定方法,從而建立伸縮管操縱品質評定方法。最后,通過對多組試驗樣本進行基于任務的操縱品質評定,并采用低階等效擬配方法獲得各個研究樣本的低階等效參數[12-14],再對評定結果和低階等效參數之間的聯系進行研究與整理,從而獲得了相應的操縱品質邊界,進而建立伸縮管操縱品質要求。由于本文提出的方法和操縱品質要求是通過在地面空中加油模擬器上模擬真實空中加油任務獲得的,因此具有一定的客觀性和準確性。
1 伸縮管本體介紹
1.1 伸縮管
本文所研究伸縮管的結構如圖1所示,主要由萬向節、主硬管、內管、舵面、加油接頭組成。伸縮管的本體部分為管狀結構,內部安裝有可伸縮的雙層套管,分別為主硬管和內管,內管端部有加油接頭,它們共同組成輸送燃油的通道[15]。伸縮管通過萬向節懸掛在加油機的尾部,可以繞萬向節進行俯仰和滾轉運動。伸縮管上安裝有舵面,通過控制舵面的偏轉,可以改變舵面的氣動力,控制伸縮管的俯仰和滾轉運動。

圖1 伸縮管組成結構Fig.1 Mechanical structure of flying boom
伸縮管的運動范圍必須滿足空中加油任務的需求。美軍聯合作戰機構關于空中加油任務的相關指導文件規定,在進行硬式空中加油時,加油機(如KC-135)伸縮管的使用運動范圍如圖2所示。從圖2中可以看出伸縮管俯仰運動是以30°俯仰角為中心線,俯仰運動范圍為[20°, 40°],偏航運動是以0°偏航角為中心線,偏航運動范圍為[-10°, 10°]。
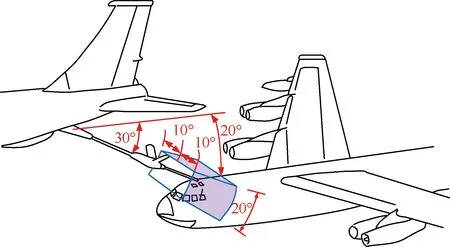
圖2 伸縮管飛行范圍[8]Fig.2 Flight limits of flying boom[8]
1.2 本體特性
伸縮管的舵面具有安定面和操縱面的雙重作用。當舵面固定不動時,舵面提供伸縮管受到擾動時的穩定力矩,因此具有安定面的作用。當舵面偏轉產生操縱力矩用于控制伸縮管的姿態時,舵面又具有操縱面的作用。伸縮管的舵面一般安裝在主硬管的尾部,由于舵面是其升力的主要來源,因此伸縮管的氣動中心相對質心靠后,伸縮管具有靜穩定性。
雖然加油機的伸縮管具有類似于飛機舵面的操縱面,但是二者在約束形式、受力特性、運動特性等方面存在著較大的差異。飛機在空中飛行屬于自由無約束狀態,具有6個自由度,可以實現空間內的任意方向運動。而伸縮管的端點受萬向節約束,僅具有偏航和俯仰兩個運動自由度。此外伸縮管的內管可以在作動器的作用下實現伸縮運動,內管的伸縮在一定程度上也會改變伸縮管的姿態運動特性。飛機在飛行過程中,所受到的主要作用力為氣動力、重力、發動機推力,而伸縮管除了受到氣動力與重力的作用外,還受到了加油機通過萬向節提供的支反力與支反力矩。通過上述分析不難發現伸縮管與飛機的運動模型存在一定的差異。


表1 伸縮管模態參數Table 1 Modal parameters of flying boom

圖3 伸縮管模態響應圖Fig.3 Responses of modes of flying boom
2 獲取任務試驗樣本
一般而言,伸縮管必須在控制器的作用下才能完成空中加油任務,因此操縱品質評定必須針對伸縮管的閉環系統。此外,目前國內外服役的伸縮管型號太少,可供研究的數據較少,這是限制伸縮管操縱品質研究的最大障礙。美國德萊頓飛行研究中心采用基于參考模型的控制方法來獲得用于任務試驗與品質研究的研究樣本和數據[17]。文獻[6]也采用了同樣的方法獲得了飛行品質評價的樣本,這些應用客觀上證明了該方法的有效性。為了克服數據限制,本文通過借鑒該方法,引入可以改變響應特性的控制器,來獲取用于研究的試驗樣本,從而為基于任務的操縱品質評定提供試驗樣本和數據支撐。
2.1 控制系統結構
為了完成伸縮管控制器設計并獲得用于分析操縱品質的樣本,采用包含控制器和參考模型的伸縮管控制系統,進行操縱品質研究[16]。控制器由滑模干擾觀測器和反演控制器組成,滑模干擾觀測器的作用是在線地估計表征建模不確定性的復合擾動的大小,并將其反饋給自適應反演控制器。自適應反演控制器采用反演法進行設計,使伸縮管姿態控制系統能夠漸進地跟蹤參考模型輸出姿態指令,使系統的閉環響應與參考模型相近似(具體設計過程參考文獻[16])。文獻[16]的研究結果表明,該控制器具有較強的魯棒性和良好的控制性能。
伸縮管控制系統整體結構圖如圖4所示,由桿指令整形、參考模型、自適應反演控制器、滑模干擾觀測器、舵面執行機構以及伸縮管本體運動模型組成。其中,參考模型用于反映對閉環系統響應的期望,可以影響系統的輸出響應,即不同的參考模型參數下閉環系統的響應特性不同。

圖4 伸縮管姿態控制系統結構圖Fig.4 Structure diagram of attitude control system of flying boom
2.2 參考模型
文獻[6,12]通過修改控制系統中的參考模型參數得到了不同閉環響應特性的研究對象,進而獲得了用于飛行品質研究的樣本數據。為了獲取伸縮管品質評定的試驗樣本,本文對參考模型在伸縮管控制系統中的作用進行了分析。根據文獻[1]關于伸縮管系統傳遞函數的描述,伸縮管姿態響應可近似為二階系統響應,因此為了讓系統的輸出更接近伸縮管原有的響應特性,本文采用如圖5所示的二階參考模型。
在圖5中,幅值限制和速率限制的取值可依據實際情況進行設計,本文中指令信號的幅值限制設置為[-10°,10°](偏航)和[20°,40°](俯仰),由伸縮管的運動范圍所決定。速率限制與伸縮管的舵面操縱能力有關,本文設置兩個通道的速率限制為[-80,80](°)/s。
參考模型參數與伸縮管閉環系統響應存在一定的聯系,為了比較在不同參數下伸縮管系統的姿態響應,本文給出多組不同參考模型參數下的伸縮管姿態階躍響應。當操縱桿給出的桿指令經過參考模型后,可近似為一個二階系統響應,伸縮管在其控制系統作用下,跟蹤該指令信號。從圖6可以看出,參考模型在一定程度上決定了系統的響應特性,參考模型參數對輸出響應的影響與二階系統的阻尼比以及固有頻率對系統響應的影響類似。其中,ζ影響系統的超調量,當ζ≥1以后,系統的超調量為0。ωn影響系統的響應快慢,ωn越大說明系統響應越迅速。根據本文所采用的控制系統的這個特性,可以通過改變參考模型的ωn和ξ來獲取不同響應特性的試驗樣本。

圖5 參考模型結構Fig.5 Structure of reference model

圖6 不同特征參數下的伸縮管響應Fig.6 Response of flying boom with different characteristic parameters
3 試驗平臺
本文試驗在地面模擬器上完成,所用試驗平臺閉環框圖如圖7所示,整個試驗平臺的組成單元包括伸縮管操縱員、伸縮管操縱桿系統、計算機、伸縮管屏顯系統。
在試驗過程中,加油機在控制器的作用下保持定直平飛,伸縮管操縱員通過伸縮管操縱桿將操縱指令輸入計算機中。在計算機中利用MAT-LAB軟件建立仿真平臺實時仿真計算加油機和伸縮管的運動狀態,并將伸縮管的運動狀態傳輸給基于Flight Gear軟件的硬式空中加油視景系統,視景如圖8所示。MATLAB仿真平臺主要由3部分組成:加油機運動仿真模塊、伸縮管運動仿真模塊、飛行環境模塊。加油機和伸縮管運動仿真模塊都包含了各自的控制器、氣動以及運動模型,從而建立關于加油機和伸縮管閉環系統的仿真模型,其中加油機的控制器保持加油機做定直平飛運動,而伸縮管的控制器(結構如圖4所示)用于實現操縱員對伸縮管的操縱。飛行環境模塊包含大氣紊流和加油機尾流場,以模擬硬式空中加油伸縮管的操縱環境。Flight Gear軟件建立了硬式空中加油視景系統,通過該視景系統可以得到伸縮管操縱員所需的視景圖像,并通過屏顯系統將視景圖像展示給伸縮管操縱員。整個試驗平臺的計算主要涉及運動方程和操縱指令的求解以及Flight Gear軟件視景的生成,計算量較小,能夠滿足實時計算的要求。

圖7 試驗閉環框圖Fig.7 Closed-loop structure diagram of test

圖8 伸縮管視景Fig.8 Scene of flying boom
4 基于任務的品質評定方法
基于任務的伸縮管操縱品質評定是通過設計反映硬式空中加油需求的伸縮管操縱任務試驗對伸縮管的操縱品質進行評定。為了模擬實際的硬式空中加油需求,本文通過對實際的硬式空中加油任務進行模擬從而完成試驗任務以及指令的設計。為了對試驗結果進行評定,本文還設計了針對伸縮管操縱品質試驗的評定方法。
4.1 操縱任務設計
飛行任務是基于任務的評定方法的核心,但是目前關于該方面的文獻研究較少,如何選擇合適的任務是使用基于任務的評定方法首先需要解決的問題。硬式空中加油任務主要要求伸縮管在操縱員的操縱下能夠精確地跟蹤受油口,從而完成對接,因此伸縮管的姿態跟蹤能力是操縱品質評定的設計重點[18]。根據要求并且參考MIL-MIL-HDBK-1797A[19]關于多軸屏顯跟蹤任務的描述,設計了伸縮管姿態跟蹤任務, 如表2所示。
在表2任務卡中定義了任務試驗的考察目標、目標機動、試驗的初始化狀態和任務性能標準。其中目標機動主要通過屏幕上目標點的運動來實現,目標點的運動由伸縮管試驗任務指令信號決定。試驗開始時,伸縮管位于初始預定平衡狀態,加油機做定直平飛運動。試驗結果的評價主要從試驗任務結果的好壞和操縱員的工作強度這兩方面進行,因此任務卡對任務性能進行了定義和描述。
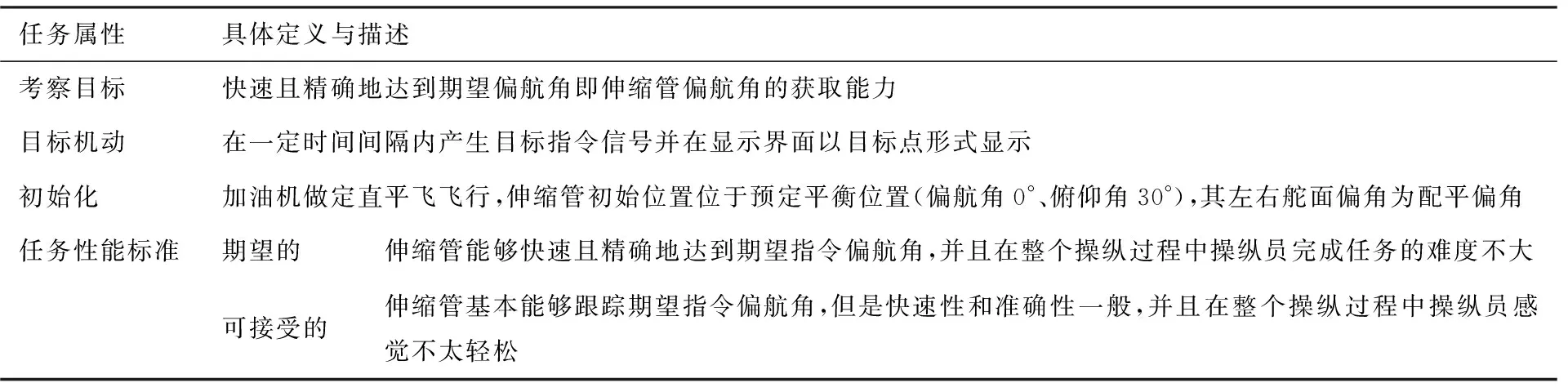
表2 姿態跟蹤任務卡Table 2 Attitude tracking description sheet
4.2 任務目標指令設計
任務的目標指令信號用以反映伸縮管在硬式空中加油中的任務需求,而伸縮管在硬式加油過程中的主要任務是快速并精確對準受油機接口,因此,試驗所用目標指令必須能真實地反映受油機受油口的相對位置變化。根據這一原則,任務的目標指令采用如下方法生成:在空中加油模擬器上,受油機駕駛員駕駛受油機進行硬式空中加油,駕駛員操縱飛機使其位于硬式加油點處并控制飛機相對于加油機盡量不發生相對運動。在這個過程中,受油機駕駛員將操縱飛機抵抗大氣紊流以及加油機尾流場對飛機姿態與位置造成的擾動。輸出在整個過程中受油機相對伸縮管的姿態,重復多次試驗并選擇最為適中的結果作為任務試驗指令,本文最終采用的任務指令信號如圖9所示。


圖9 伸縮管指令信號Fig.9 Attitude command of flying boom
4.3 試驗評定方法
結合MIL-F-8785C-80[20]關于飛機飛行品質的定義,給出了伸縮管操縱品質等級的定義:
等級1 伸縮管特別適合完成制定的飛行任務,在沒有或較少的操縱員補償下即可完成期望的加油任務。
等級2 伸縮管適合完成制定的飛行任務,但操縱員的工作負擔有所增加或完成任務的效果有所降低,或兩者兼有。
等級3 伸縮管操縱品質能滿足操縱安全的要求,但操縱員的工作負擔過重或完成任務的效果不好,或兩者兼有。硬式空中加油任務很難完成。
對任務試驗的評定包括兩個方面:一是主觀評定,操縱員利用Cooper-Harper評定標準結合任務的完成效果與操縱人員的主觀感受進行操縱品質評分;二是客觀評定,由試驗工程師根據試驗任務完成的客觀情況給出伸縮管操縱品質的結論。
1) 主觀評定
操縱員對伸縮管操縱品質的評定方法借鑒Cooper-Harper飛行品質評定流程以及其評定標準[21]。Cooper-Harper評定方法是從駕駛員任務完成負擔上對飛機的操縱品質進行定性的描述,由于該方法不針對對象本身而是針對任務完成過程駕駛員的感受(完成任務容易或者困難),因此該方法同樣適用于伸縮管。本文中,操縱員按照該流程和標準給出任務試驗的伸縮管操縱品質的評定分數,其評分標準與Cooper-Harper保持一致,這樣便于直觀區分伸縮管的操縱品質等級。
2) 客觀評定
客觀評定是利用試驗結果數據對操縱員操縱伸縮管完成任務情況進行評定。為了描述操縱品質試驗任務的客觀完成情況,本文還引入任務完成度的概念。參考MIL-HDBK-1797A[19],本文定義伸縮管操縱品質試驗中任務完成度為姿態跟蹤誤差低于±0.5°的時間占整個任務時間的比例。±0.5°是一般受油機受油口的容許對接誤差,因此任務完成度也反映了伸縮管在試驗過程中完成對接的情況。
結合兩種評定結果,本文對伸縮管操縱品質等級、駕駛員評定和任務完成度關系做出如表3所示規定。利用主客觀評定結果以及表3即可完成對伸縮管操縱品質的評定。
根據本文對伸縮管本體特性的研究,伸縮管的運動主要包含偏航和俯仰兩個模態。為了使評價的結果針對這2個模態進行,本文在地面模擬器上分別對偏航和俯仰二個姿態跟蹤任務進行了試驗。在單次試驗時,只考慮單個自由度上的任務,以保證任務試驗和操縱模態的一一對應。
1) 偏航姿態跟蹤評定
以其中一組樣本(其偏航參考模型固有頻率為4.00 rad/s,阻尼比為0.82)為例,經過多次試驗之后(圖 10為其中一組試驗結果),參與試驗的操縱員給出Cooper-Harper評分為1.5分,試驗工程師通過對試驗數據進行分析,發現在試驗過程中,伸縮管偏航角跟蹤誤差在±0.5°內的時間比例為59.81%,其跟蹤效果達到期望的等級。因此結合表 3給出的關系,認為在該組參數下,伸縮管的操縱品質達到1級標準。
2) 俯仰姿態跟蹤評定
俯仰姿態跟蹤任務的評定與偏航任務的評定方法相同,以其中一組樣本(其俯仰參考模型固有頻率為3.75 rad/s,阻尼比為0.88)為例,經過多次試驗之后(圖 11為其中一組試驗結果),操縱員給出Cooper-Harper評分為2分。試驗工程師通過對試驗數據進行分析發現在試驗過程中,伸縮管偏航角跟蹤誤差在±0.5°內的時間比例為58.62%,其跟蹤效果達到期望的等級。結合主觀和客觀的評定結果,本文認為在該組參數下,伸縮管的操縱品質達到1級標準。

表3 任務完成評定標準Table 3 Performance standard of task
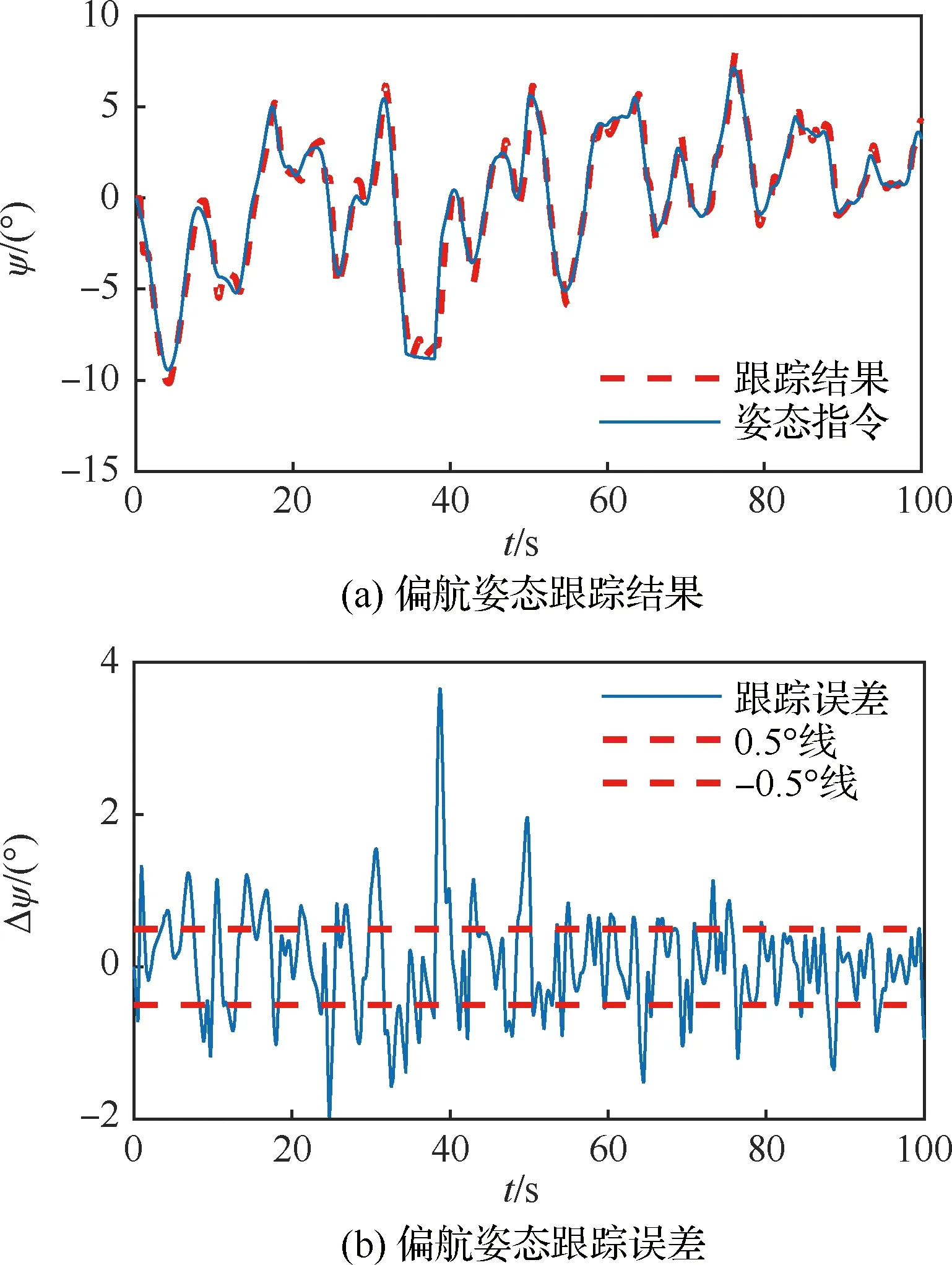
圖10 偏航操縱品質試驗結果(ωn=4 rad/s,ζ=0.8)Fig.10 Result of yaw axis handling quality test (ωn=4 rad/s,ξ=0.8)

圖11 俯仰操縱品質試驗結果 (ωn=3.75 rad/s,ξ=0.88)Fig.11 Result of pitch axis handling quality test (ωn=3.75 rad/s,ξ=0.88)
5 伸縮管操縱品質要求
低階等效擬配方法是常用于評定飛機飛行品質的方法。本文采用低階等效擬配方法獲取作為試驗樣本的伸縮管閉環系統的低階等效參數,再根據基于任務試驗的評定結果,對硬式加油伸縮管的操縱品質要求進行分析。
5.1 低階等效擬配
帶有控制系統的伸縮管由本體以及控制系統等組成,系統階次較高,且包含一些非線性環節。對于此類系統可以采用等效系統方法對其進行分析與評定。本文前面部分描述了參考模型參數對伸縮管姿態響應特性具有較大的影響,伸縮管姿態響應與參考模型參數具有一定的聯系。因此本文通過修改參考模型的參數,再利用等效擬配方法求得其在不同參考模型參數下的低階等效系統參數,從而獲得不同的低階等效模型。
低階等效系統的模型選擇至關重要,而飛機和伸縮管存在較大的區別。首先飛機氣動外形由機身、升力面、安定面以及操縱面等組成,而伸縮管主要由管體組成并安裝于主硬管尾部;其次,飛機的運動模型由質心運動和繞質心的轉動組成,而伸縮管的運動模型由繞萬向節的鉸鏈點的姿態運動組成,并且萬向節的鉸鏈點安裝在伸縮管前端,不與質心重合;再次,飛機在大氣中飛行處于自由狀態,而伸縮管由前端的萬向節約束,萬向節限制了伸縮管的質心運動和伸縮管滾轉轉動運動。文獻[5, 15]表明,伸縮管偏航和俯仰通道的姿態響應近似為二階系統響應。因此令系統偏航通道和俯仰通道的低階等效模型分別為
(1)

(2)
式中:Wψ和Wθ分別為操縱桿偏航和俯仰的桿位移;Kψ和Kθ分別為偏航和俯仰的增益參數;ξψ和ξθ分別為偏航和俯仰的阻尼參數;ωψ和ωθ分別為偏航和俯仰的固有頻率。可以通過MIL-STD-1797A推薦的方法和檢驗擬配結果的幅相包絡曲線對伸縮管的低階等效擬配模型進行求解。因為人有意識的操縱主要集中在0.1 ~10 rad/s,所以本文選擇在該頻域范圍內對伸縮管進行低階等效擬配。
通過對試驗樣本進行低階等效擬配,可以獲得樣本的低階等效模型參數。根據飛機飛行品質的研究理論,低階等效模型的參數可以反映操縱品質的特性,研究低階等效模型參數與任務試驗結果之間的關系,可以得出伸縮管操縱品質要求。
5.2 操縱品質要求
通過對多個樣本進行任務試驗,可以獲得較為豐富的試驗結果。再對這些樣本低階等效擬配,獲得每個樣本所對應的等效參數。一般而言,固有頻率和阻尼比幾乎可以描述二階系統的所有特征參數。因此,本文將伸縮管的低階等效系統的固有頻率和阻尼比作為伸縮管操縱品質的評定參數。
為了分析伸縮管操縱品質的要求,對多個樣本進行任務試驗與評定,并計算了這些樣本的低階等效擬配參數。根據試驗結果和低階模型的固有頻率以及阻尼比的關系,繪制了伸縮管操縱品質的邊界(見圖 12)。從圖中可以看出,伸縮管偏航和俯仰通道的一級操縱品質區域被二級操縱品質包圍,其中一級操縱品質邊界呈“V”形,二級與三級之間的邊界呈“U”型。與俯仰操縱不同,由于伸縮管的動力學特性以及操縱桿的形式,操縱員進行偏航操縱容易附帶有俯仰操縱,操縱員要經過一段時間的訓練才能消除偏航時的俯仰操縱,并且在操縱過程中需要付出一部分精力來完成這一操縱,因此與俯仰操縱相比,偏航操縱難度更大。

圖12 操縱品質要求Fig.12 Requirements of handling qualities
可以利用伸縮管的等效系統(式(1)和式(2))來解釋圖12中的操縱品質要求。根據文獻[22],固有頻率增大,則等效系統響應更快,伸縮管更靈敏。因此固有頻率越大,越容易獲得較好的操縱品質,故在圖中固有頻域大的區域更易達到一級品質。阻尼比從0增大到1時,隨著阻尼比的增加,等效系統的超調量減小且調節時間減小,系統的動態響應得到改善,因此操縱品質變好。而當阻尼比大于1時等效系統為過阻尼系統,隨著阻尼比的增加,系統響應變慢,操縱品質逐漸變差。因此在圖12中偏航和俯仰通道的一級操縱品質區域形狀近似一個“V”形區域。
圖12反映了操縱品質對伸縮管設計的要求,給出操縱品質的邊界,設計人員可以根據圖12,設計伸縮管的氣動構型以及控制系統以達到要求的操縱品質等級。同時利用本文提出的低階等效擬配方法,對伸縮管的閉環系統進行低階等效擬配,再結合圖 12的操縱品質要求,可以快速完成伸縮管偏航和俯仰通道操縱品質評定,從而判斷設計是否滿足要求。
6 結 論
本文對伸縮管的本體特性以及伸縮管控制系統設計進行了敘述與分析,設計了伸縮管操縱品質試驗并在模擬器上對不同操縱品質參數下的伸縮管進行了任務評定。利用低階等效擬配方法獲得了試驗樣本的低階等效參數,并結合任務評定結果最終對伸縮管偏航軸和俯仰軸的操縱品質要求進行了研究。
1) 伸縮管的運動分為偏航和俯仰2個運動模型,這2個模態均存在阻尼不足的特點。伸縮管偏航和俯仰的低階等效模型為二階系統,通過低階等效方法可以獲得其相應的等效系統。
2) 利用基于任務的操縱品質評定結果,結合低階等效模型的固有頻率和阻尼比,得到了偏航以及俯仰操縱品質的邊界,其中一級操縱品質邊界呈“V”形,二級與三級之間的邊界呈“U”形。由于操縱桿的特性,一般而言,進行偏航操縱時容易夾帶俯仰操縱,使得偏航操縱任務更難完成,因此偏航操縱品質的一級與二級操縱品質區域相對于俯仰操縱品質的區域更“狹窄”。
3) 本文提出的方法可用于伸縮管閉環操縱品質的評定,提出的操縱品質邊界可作為伸縮管以及其控制系統設計的設計邊界,為設計提供理論支撐。此外,本文所提出的方法可為類似伸縮管這類完成特定任務且有操縱品質要求的器械或者飛行器的操縱品質評價提供研究思路和基礎。
[1] CHRISTOPHER B, KLAUS J D. Air force aerial refueling methods: Flying boom versus hose-and-drogue: ADA454450[R]. Washington, D.C.: DTIC, 2005.
[2] 全權, 魏子博, 高俊, 等. 軟管式自主空中加油對接階段中的建模與控制綜述[J]. 航空學報, 2014, 35(9): 2390-2410.
QUAN Q, WEI Z B, GAO J, et al. A survey on modeling and control problems for probe and drogue autonomous aerial refueling at docking stage[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(9): 2390-2410 (in Chinese).
[3] 陸宇平, 楊朝星, 劉洋洋. 空中加油系統的建模與控制技術綜述[J]. 航空學報, 2014, 35(9): 2375-2389.
LU Y P, YANG C X, LIU Y Y. A survey of modeling and control technologies for aerial refueling system[J]. Acta Aeronautica et Astronautica Sinica, 2014,35(9):2375-2389 (in Chinese).
[4] THOMAS P R. Advances in air to air refueling[J]. Progress in Aerospace Sciences, 2014, 71(1): 14-35.
[5] YANG C X, LIU Y Y, LU Y P. Flying qualities evaluation of aerial refueling boom with stability augmentation system[C]∥Proceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference. Piscataway, NJ: IEEE Press, 2014: 1132-1138.
[6] 候天俊, 郭有光, 王立新. 基于任務的飛機大迎角飛行品質評定準則[J]. 北京航空航天大學學報, 2015, 41(9):1736-1741.
HOU T J, GUO Y G, WANG L X. Mission-oriented flying qualities criteria for high angle of attack aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(9): 1736-1741 (in Chinese).
[7] DAVID J, DAVID R, KEVIN D. Aircraft maneuvers for the evaluation of flying qualities and agility (v1): WL-TR-93-3801[R]. Washington, D.C.: DTIC, 1993.
[8] DAVID J, DAVID R, KEVIN D. Aircraft maneuvers for the evaluation of flying qualities and agility (v2): WL-TR-93-3801[R]. Washington, D.C.: DTIC, 1993.
[9] DAVID J, DAVID R, KEVIN D. Aircraft maneuvers for the evaluation of flying qualities and agility (v3): WL-TR-93-3801[R]. Washington, D.C.: DTIC, 1993.
[10] 龍晉偉, 潘文俊, 王立新. 戰斗機動態逆控制律對比研究[J]. 飛行力學, 2013, 31(4): 297-300.
LONG J W, PAN W J, WANG L X. A comparison of nonlinear dynamics inversion control designs for a fighter aircraft[J]. Flying Dynamics, 2013, 31(4): 297-300 (in Chinese).
[11] CHRISTOPHER J. Nonlinear dynamic inversion baseline control law: Architecture and performance predictions: AIAA-2011-6467[R]. Reston, VA: AIAA, 2011.
[12] 李淼, 王立新, 黃成濤. 舵面特性對飛翼構型作戰飛機短周期品質的影響[J]. 航空學報, 2009, 30(11): 2059-2065.
LI M, WANG L X, HUANG C T. Influence of control surface characteristics on short period mode flying qualities for flying wing aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2009, 30(11): 2059-2065 (in Chinese).
[13] 梁鋒, 張林昌, 李春錦. 評定飛行品質的等效系統法[J]. 航空學報, 1988, 9(11): 581-585.
LIANG F, ZHANG L C, LI C J. Equivalent systems method to evaluate the flight qualities[J]. Acta Aeronautica et Astronautica Sinica, 1988, 9(11): 581-585 (in Chinese).
[14] 周堃, 王立新, 譚詳升. 放寬靜穩定電傳客機縱向短周期品質評定方法[J]. 航空學報, 2012, 33(9): 1606-1615.
ZHOU K, WANG L X, TAN X S. Handling qualities assessment of short period mode for fly-by-wire passenger airliner with relaxed static stability design[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(9): 1606-1615 (in Chinese).
[15] 楊朝星, 劉洋洋, 陸宇平. 變質量分布硬式加油管建模與反演自適應控制[J]. 系統工程與電子技術, 2015, 37(4): 911-917.
YANG C X, LIU Y Y, LU Y P. Modeling and backstepping adaptive control of refueling boom with variable mass distribution[J]. System Engineering and Electronics, 2015, 37(4): 911-917 (in Chinese).
[16] CAO H Z, WANG L X, YUE T. Design of flying boom controller before and after docking[C]∥Proceedings of 2016 IEEE Guidance, Navigation and Control Conference (CGNCC). Piscataway, NJ: IEEE Press, 2016: 1375-1380.
[17] MILLER C. Nonlinear dynamic inversion baseline control law: Flight-test results for the full-scale advanced systems testbed F/A-18 airplane[C]∥AIAA Guidance, Navigation, and Control Conference. Reston, VA: AIAA, 2013.
[18] CHRISTOPHER J. A handing qualities investigation of selected response-types for the air refueling task[C]∥AIAA Atmospheric Flight Mechanics Conference. Reston, VA: AIAA, 1995: 30-40.
[19] U.S. Department of Defense. Flying qualities of piloted aircraft: MIL-HDBK-1797A[S]. Arlington: Department of Defense, 1997.
[20] U.S. Department of Defense. Flying qualities of piloted airplane: MIL-F-8785C-80 [S]. Arlington: Department of Defense, 1980.
[21] HARPER R P, COOPER G E. Handling qualities and pilot evaluation[J]. Journal of Guidance, Control, and Dynamics, 1986, 9(5): 515-529.
[22] FRANKLIN G F, POWELL J D. Feedback control of dynamic systems [M]. New York: Pearson, 2007: 62-64.
附錄A
伸縮管的運動模型為繞萬向節轉動的姿態運動,文獻[16]給出了描述伸縮管姿態運動的剛體運動模型。利用飛機的小擾動線化原理和方法對文獻[16]給出的伸縮管動力學方程線化,可得

(A1)
式中:
(A2)
(A3)

(A4)

(A5)
(A6)
(A7)
g1=Izcos2θ+2Ixzcosθsinθ+Ixsin2θ
(A8)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12