BOC調制信號抗多徑雙環(huán)估計方法
2018-04-26 07:30:56李文剛王屹偉
系統(tǒng)工程與電子技術 2018年5期
李文剛, 王屹偉, 陳 睿, 劉 猛
(西安電子科技大學綜合業(yè)務網(wǎng)理論及關鍵技術國家重點實驗室, 陜西 西安 710071)
0 引 言
雙環(huán)估計方法[1-2]是針對全球衛(wèi)星導航系統(tǒng)(global navigation satellite system, GNSS)中的二進制偏移載波(binary offset carrier, BOC)調制信號[3]提出的一種無模糊相位估計方法。其基本原理是對BOC調制信號的偽隨機碼和副載波分別進行跟蹤。相對于已有的二進制相移鍵控(binary phase shift keying,BPSK)信號近似方法[4]、跳峰方法[5]、多相關器估計法[6]、參考波形相關法[7-8]、雙邊帶跟蹤[9]等方法,該方法能夠更為穩(wěn)健地對BOC調制信號進行相位估計和跟蹤。尤其是對于高階BOC調制信號[10],雙環(huán)估計方法的優(yōu)勢更為明顯。
根據(jù)對副載波相位的估計方法的不同,雙環(huán)估計分為延遲鎖定估計型和鎖相環(huán)估計型[11],兩者性能近似。文獻[12-13]將雙環(huán)估計方法用于交替二進制偏移載波(alternative binary offset carrier, AltBOC)調制信號和復合交替二進制偏移載波(composite binary offset carrier, CBOC)的碼相位估計,文獻[14]則分析了帶限條件下雙環(huán)估計的抗多徑性能。實際環(huán)境中,多徑干擾[15]是GNSS系統(tǒng)重要的誤差源之一,而雙環(huán)估計方法能夠對碼相位進行無模糊、穩(wěn)健的估計,卻沒有將抗多徑性能考慮其中。為了解決已有BOC調制信號碼相位估計方法不能夠同時實現(xiàn)無模糊、抗多徑、抗低載噪比相位估計的問題[16],本文提出一種改進的雙環(huán)估計方法,并給出了所提方法在帶限條件下的性能分析,通過計算機仿真比較了所提方法與已有方法的多徑誤差包絡[17]和在不同載噪比下的跟蹤誤差[18]。
1 抗多徑雙環(huán)估計方法
1.1 接收信號模型
不考慮多徑信號的影響,經(jīng)過天線下變頻后接收到的BOC調制信號可以表示為
r(t)=Ad(t)c(t-τc)e(t-τsc)cos(2πf0t+φ0)+n(t)
(1)
式中,A為當前時刻信號的幅度,在較短的時間內本文視為定值;d(t)為當前時刻的導航電文比特;c(t-τc)為相位為τc頻率為fc的偽隨機碼;e(t-τsc)為相位為τsc頻率為fsc的副載波;cos(2πf0t+φ0)為頻率為f0相位為φ0的中頻載波;n(t)為均值為0,方差為σ2的高斯白噪聲。BOC調制信號自相關函數(shù)的形式與副載波和偽隨機碼頻率的比值有關。定義fu=1.023 MHz,如圖1所示,在正負一個碼片偏移范圍內,傳統(tǒng)的二進制相移鍵控(binary phase shift keying, BPSK)導航信號的自相關函數(shù)除了主峰不存在副峰;在fc=fsc=fu的BOC(1,1)調制信號的自相關函數(shù)中,其主峰兩側相隔1/2個碼片的位置(折合146.6 m)處存在兩個對稱的副峰;在fsc=15fu,fc=2.5fu的BOC(15,2.5)調制信號的自相關函數(shù)中,其主峰兩側相隔1/12個碼片的位置(折合12.2 m)處,即存在兩個對稱的副峰,并且在正負一個碼片范圍內其自相關函數(shù)還存在若干個幅度遞減的對稱的副峰。綜上可知,雖然BOC調制信號的自相關函數(shù)的主峰相比于BPSK信號更為陡峭,但若將傳統(tǒng)的早遲相減鑒相方法應用于BOC調制信號,可能會誤鎖在其副峰位置處,進而產生模糊跟蹤。而高階的BOC調制信號相比于低階的BOC信號,雖然其主峰更加陡峭,但其主峰與副峰的間隔更小,更容易產生模糊跟蹤的問題。由于本文所要論述的雙環(huán)估計方法能應用于不同階數(shù)的BOC調制信號中,且原理完全相同。因而在后續(xù)內容中,本文以BOC(1,1)信號為例進行分析。
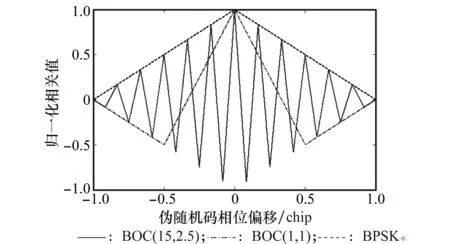
圖1 自相關函數(shù)Fig.1 Auto-correlation function
1.2 雙環(huán)估計方法
對接收到的BOC(1,1)調制信號進行載波剝離,即以本地復現(xiàn)的正交中頻載波信號與接收信號相乘,可以得到
(2)
本文假定復現(xiàn)載波的頻率與接收載波的頻率相同,式(2)中,φe為載波解調后的載波相位偏差;ni(t)和nq(t)分別為兩條支路的高斯白噪聲。
傳統(tǒng)的雙環(huán)估計方法是利用復現(xiàn)的本地偽隨機碼和副載波與式(2)求出二維相關函數(shù)。為了提高雙環(huán)估計的抗多徑性能,本文提出利用僅在偽隨機碼片邊沿出現(xiàn)的雙極性歸零碼代替原有復現(xiàn)偽隨機碼的雙環(huán)估計方法。
如圖2所示,每一個偽隨機碼邊沿的雙極性歸零波形可以表示為
(3)
進而可以寫出雙極性歸零碼的表達式,即
(4)
式中,Nc為偽隨機碼序列的長度。
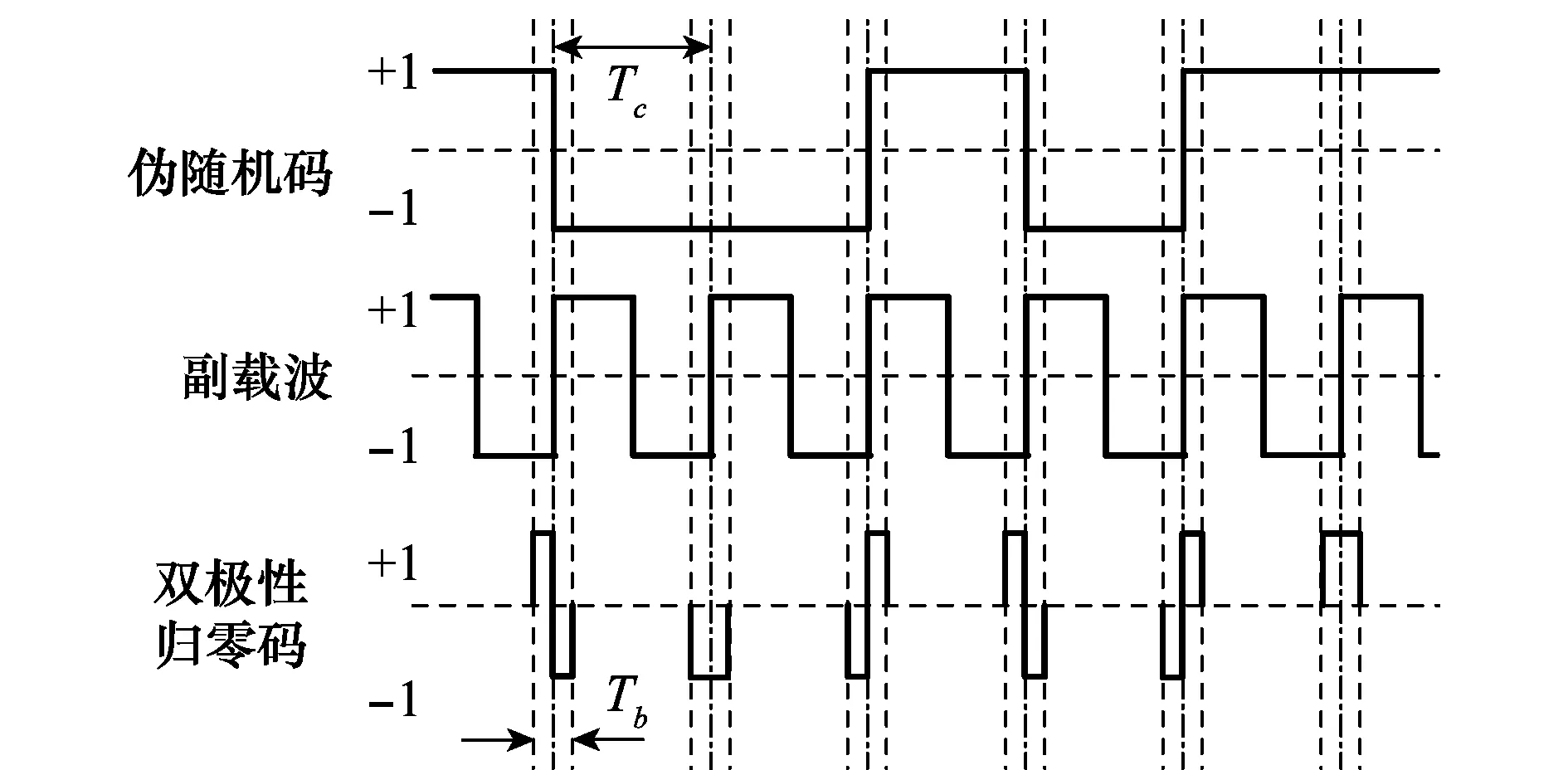
圖2 雙極性歸零碼示意圖Fig.2 Schematic diagram of bipolar zero return code
(5)
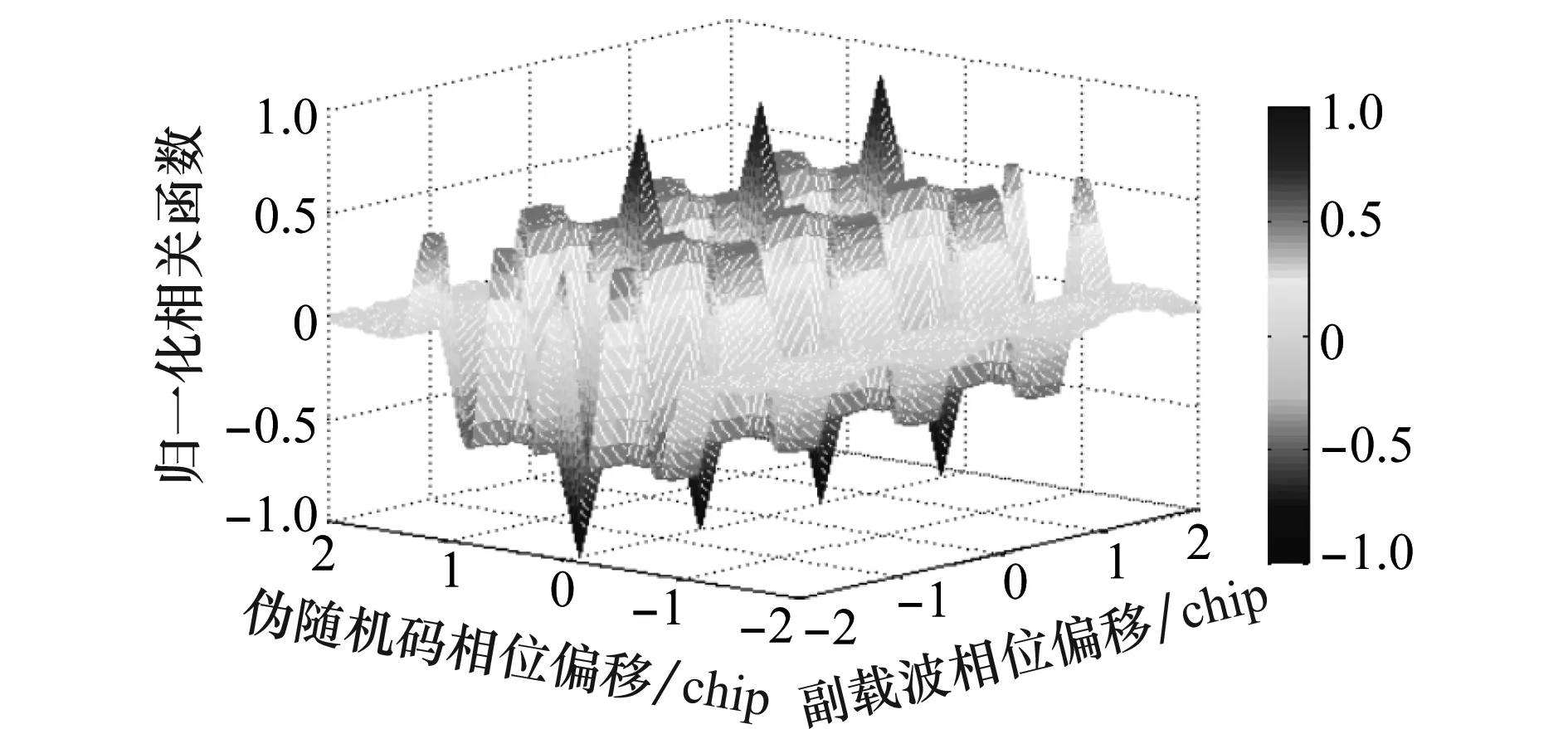
圖3 二維相關函數(shù)Fig.3 Two dimensional correlation function
對比已有雙環(huán)估計方法,所提方法獲得的二維相關函數(shù)同樣是對于副載波維度呈現(xiàn)周期性的二維圖形,但形式明顯有別:如圖4所示,所提雙環(huán)估計的相關函數(shù)在偽隨機碼維度,由傳統(tǒng)方法的三角形相關函數(shù)變?yōu)榧夥逍蔚南嚓P函數(shù)。如圖5所示,在副載波維度,所提方法的相關函數(shù)仍為雙環(huán)估計的三角波序列,但其有效寬度縮短為Tb。雙環(huán)估計的初步估計可以表示為
(6)
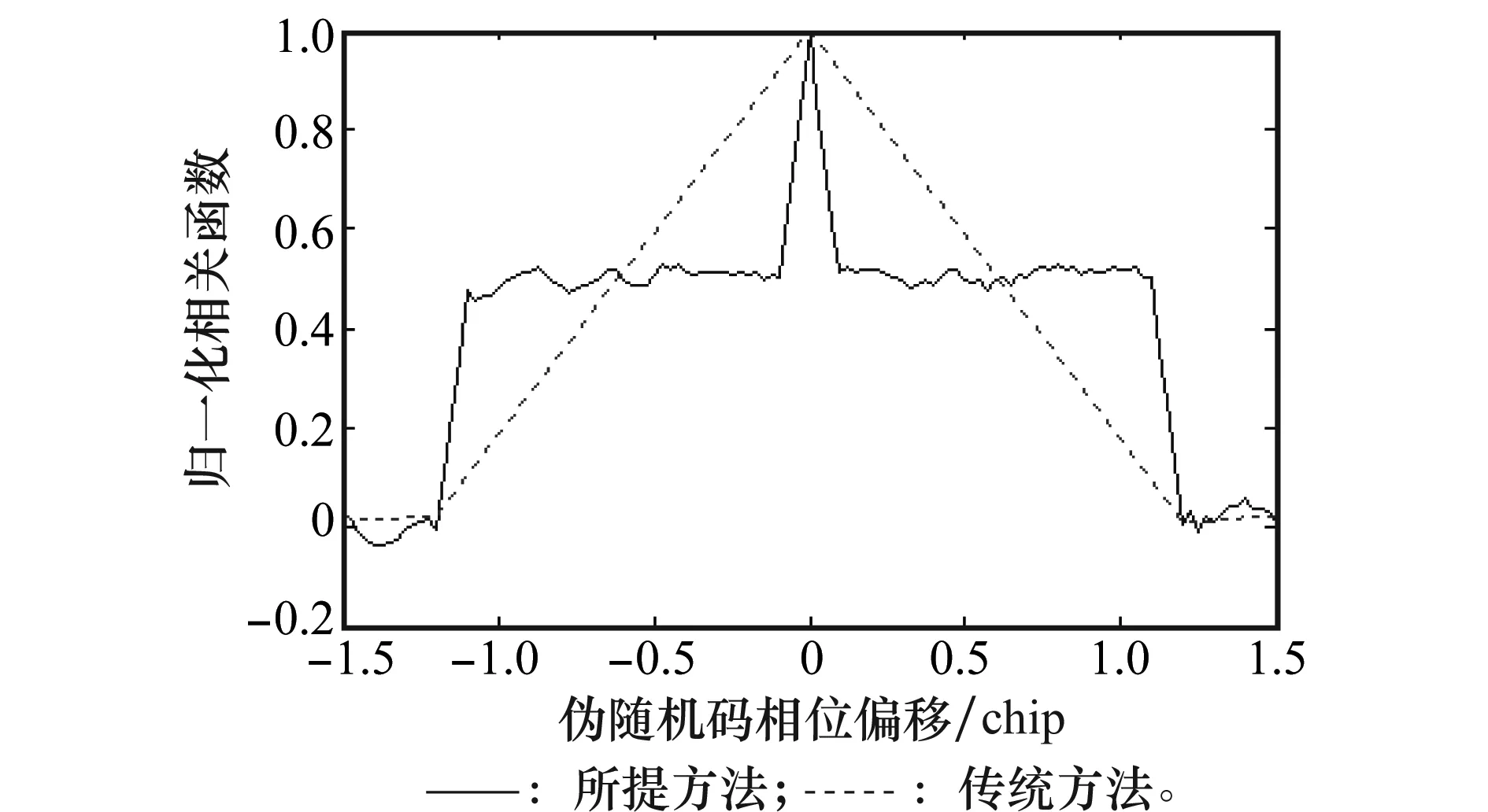
圖4 偽隨機碼相關函數(shù)Fig.4 Pseudo random code correlation function

圖5 副載波相關函數(shù)Fig.5 Sub-carrier correlation function
實際中,為了獲得精確的碼相位估計結果,應利用早遲相減的原理進行估計,并將估計的結果送入環(huán)路濾波器。對于偽隨機碼序列其鑒相過程為
σc(εc)=Ri(εc-δ1/2,0)+Rq(εc-δ1/2,0)-
Ri(εc+δ1/2,0)-Rq(εc+δ1/2,0)
(7)
同理,對于副載波序列其鑒相過程為
σsc(εsc)=Ri(0,εsc-δ2/2)+Rq(0,εsc-δ2/2)-
Ri(0,εsc+δ2/2)-Rq(0,εsc+δ2/2)
(8)

(9)

綜上,由于所提雙環(huán)估計方法在副載波維度得到較為尖銳的相關函數(shù),且在峰值之間取值為0。因而相對于傳統(tǒng)的雙環(huán)估計方法,所提雙環(huán)估計方法應具有較強的抗多徑性能。
1.3 抗多徑性能分析模型
為了分析所提方法在帶限條件下的抗多徑性能,本文結合傅里葉級數(shù)對其進行分析。由于所提的雙環(huán)估計方法在副載波維度為正負交替的三角波序列,且雙環(huán)估計的精度主要決定于對于副載波相位的估計精度,因而利用傅里葉級數(shù)進行副載波維度的相關函數(shù)展開。定義系數(shù):
(10)
式中,Ω=2π/Tc。則副載波維度的相關函數(shù)可以寫作:
(11)
式中,n為諧波的次數(shù)。根據(jù)式(8),副載波的鑒相函數(shù)可以寫為級數(shù)的形式:
(12)
若考慮多徑信號的影響,一般考慮添加一條衰減為α多徑延遲為τm的多徑信號。由于多徑延遲τm<1的多徑分量具有較強的干擾作用,因而在τm<1條件下副載波鑒相函數(shù)可以近似寫作:
em(0,εsc)=e(0,εsc)+αe(τm,εsc+τm)≈
(13)
多徑信號對于副載波鑒相函數(shù)的影響可以結合傅里葉級數(shù)展開式,根據(jù)式(13)進行估算。為了模擬帶限條件下所提方法的抗多徑性能,可以設定諧波的次數(shù)n為有限值來模擬接收機前端濾波器帶寬對所提方法造成的性能影響。結合式(12)和式(13)可知,多徑誤差的大小不僅取決于諧波的次數(shù)n即接收機前端濾波器帶寬,還取決于雙極性歸零波形的寬度Tb:當多徑信號的參數(shù)一定,Tb越小,則該多徑分量對鑒相函數(shù)造成的偏差越小。
1.4 抗低載噪比性能分析
由式(9)可以看出,雙環(huán)估計對偽隨機碼相位的估計的精度主要取決于對副載波相位的估計精度,因而將對副載波跟蹤的誤差視為雙環(huán)估計的主要誤差。假設接收信號中沒有多徑、干擾、失真的前提下,GNSS接收機的主要誤差可以視為熱噪聲引起的距離誤差顫動,可以寫作[19-20]:
(14)
式中,BL為跟蹤環(huán)路的帶寬,單位為Hz;Bfe為接收機前端濾波器帶寬,單位為MHz;C/N0為信號的載噪比,單位為dB-Hz;Gs(f)為接收信號副載波的功率譜密度。由式(14)可以看出,熱噪聲距離誤差顫動取決于接收機前端濾波器帶寬Bfe和相關器間隔δ2。當相關器間隔δ2趨于0時,根據(jù)泰勒公式可以將式(14)的正弦項展開,得到
(15)
由式(15)可以直觀地看出,當信號中具有一定的高頻分量時,熱噪聲距離誤差顫動越小,跟蹤的精度越高。由于本文所提方法采用了雙極性歸零碼代替了本地復現(xiàn)的偽隨機碼,因而經(jīng)過相干積分,相干積分能量具有損耗Lcoh,即
(16)
該損耗可以折算為載噪比C/N0的損耗。綜上所述,所提方法在低載噪比下的性能注意取決于雙極性歸零碼的寬度Tb,Tb越小,抗多徑性能越好,在低噪比下的性能也會隨之下降。
2 仿真實驗分析
2.1 抗多徑性能實驗
結合本文第1.3節(jié)的分析,在Tb=Tc/6的條件下,求出不同諧波次數(shù)條件下多徑誤差包絡,如表1所示。當諧波次數(shù)由1步進至5、7和13的過程中,多徑包絡的長度不多徑誤差包絡的面積和極值呈現(xiàn)遞減趨勢,諧波次數(shù)大于5時,多徑誤差包絡的面積和極值趨于收斂,如圖6所示。由于諧波次數(shù)步進增大的過程可以視為接收機的前端濾波器帶寬Bfe由最小值向無限變化的過程。可見,所提方法的實際性能受到接收機帶寬的影響,實際應用中應控制接收機的帶寬。
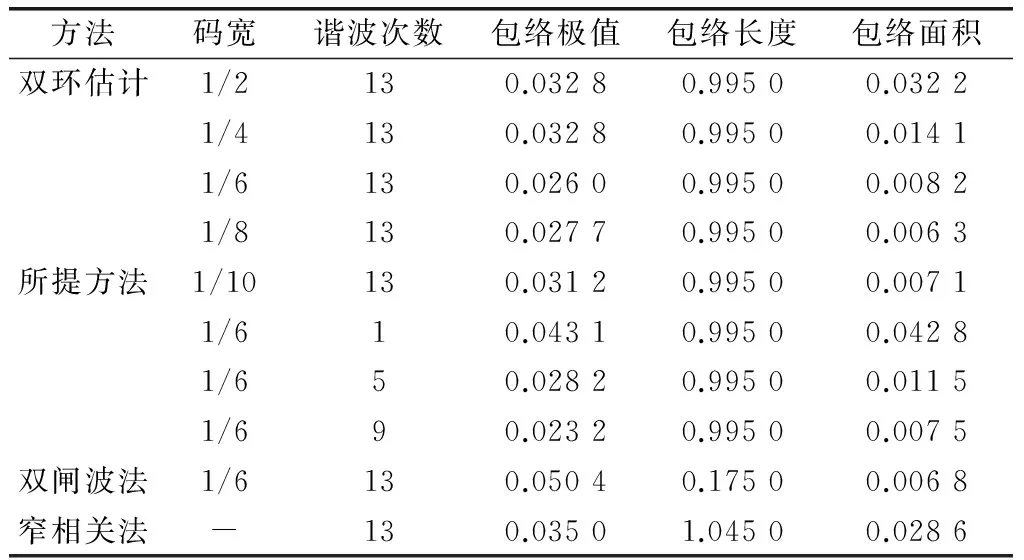
表1 多徑誤差包絡參數(shù)
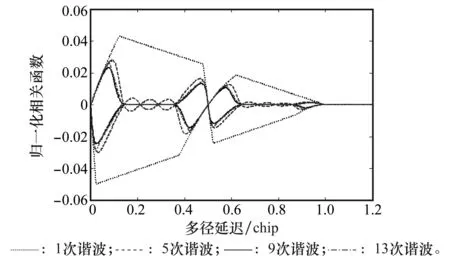
圖6 諧波與多徑誤差包絡Fig.6 Harmonic and multipath error envelope
如圖7所示,在諧波次數(shù)等于13的條件下,改變雙極性歸零波形的碼寬Tb。可以看出,多徑誤差包絡的面積和極值基本呈現(xiàn)遞減趨勢,當Tb=Tc/6時,所提方法的多徑誤差包絡極值最小,Tb=Tc/8時所提方法的多徑誤差包絡面積最小。實驗說明,在實際應用中,所提方法的碼寬Tb取值范圍在Tc/6~Tc/8較為適宜。
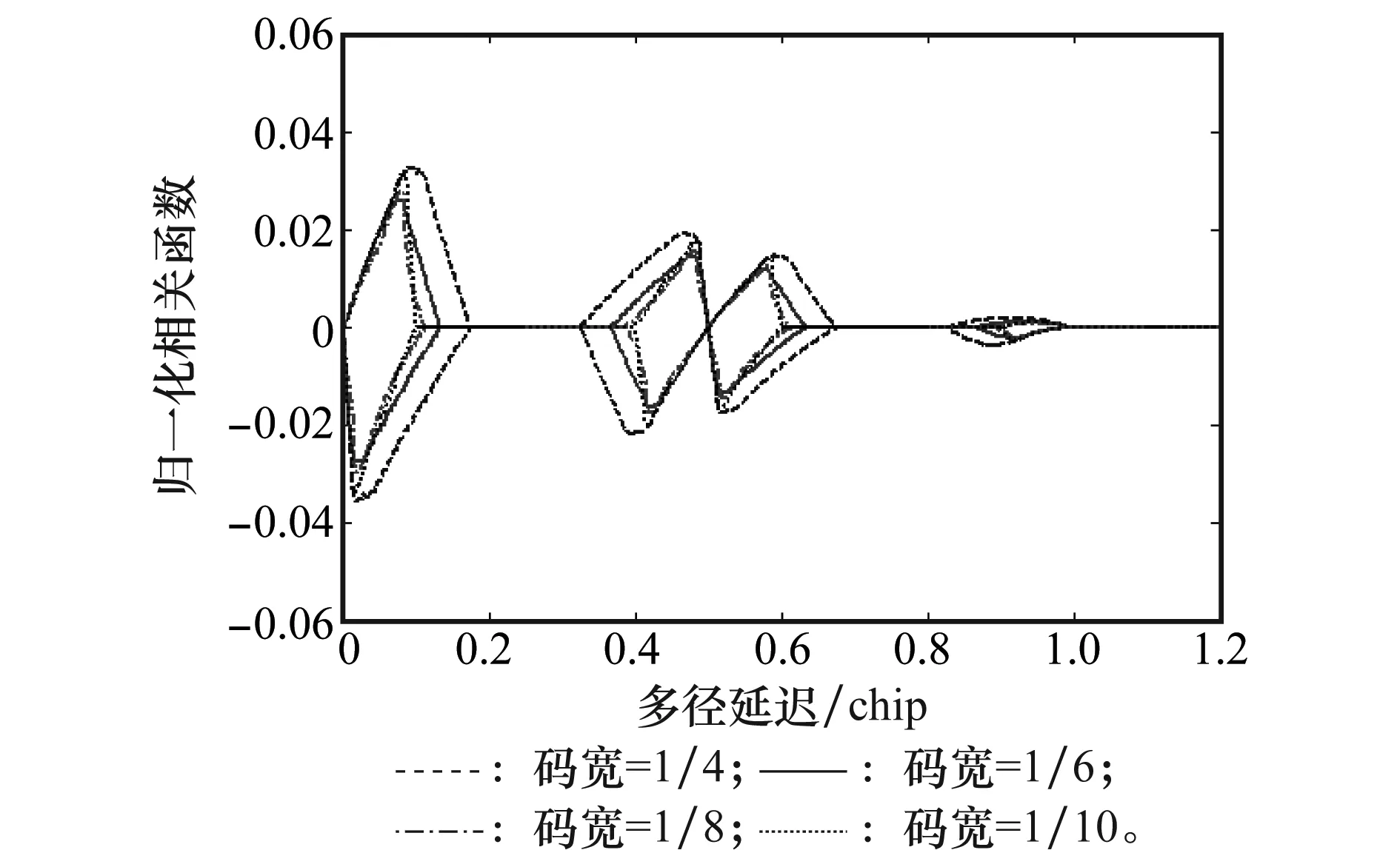
圖7 碼寬與多徑誤差包絡Fig.7 Code width and multipath error envelope
在Tb=Tc/6的條件下,比較傳統(tǒng)雙環(huán)估計方法、所提雙環(huán)估計方法、文獻[18]中的雙閘波相關方法和窄相關方法的多徑誤差包絡。其中,傳統(tǒng)雙環(huán)估計方法、窄相關方法的相關器間隔與所提方法一致(單側σ2=0.05 chip),文獻[18]中的針對BOC調制信號設計的雙閘波方法犧牲了抗低載噪比性能以換取較強抗多徑性能,若不考慮載噪比的影響,該方法的抗多徑性能可以視為最優(yōu)。如圖8所示,本文所提的雙環(huán)估計方法的多徑誤差包絡面積介于傳統(tǒng)雙環(huán)估計方法和雙閘波方法之間,而多徑誤差包絡極值最小。因而其抗多徑性能高于傳統(tǒng)雙環(huán)估計抗方法,接近雙閘波方法。
2.2 抗低載噪比性能實驗
在表2所示的仿真參數(shù)設置下,改變雙極性碼的碼寬Tb,將所提方法用于BOC(1,1)調制信號的跟蹤中,進行1 000次跟蹤仿真,待跟蹤環(huán)路達到穩(wěn)態(tài)時,統(tǒng)計跟蹤的穩(wěn)態(tài)誤差,并對1 000次仿真統(tǒng)計得出的穩(wěn)態(tài)跟蹤誤差取平均值,可以得到如圖9所示的結果。在相同的條件下,對傳統(tǒng)雙環(huán)估計方法、所提方法、參考文獻[8]中的雙閘波參考波形相關方法以及窄相關方法進行1 000次仿真并統(tǒng)計平均穩(wěn)態(tài)跟蹤誤差,可以得到如圖10所示的結果。
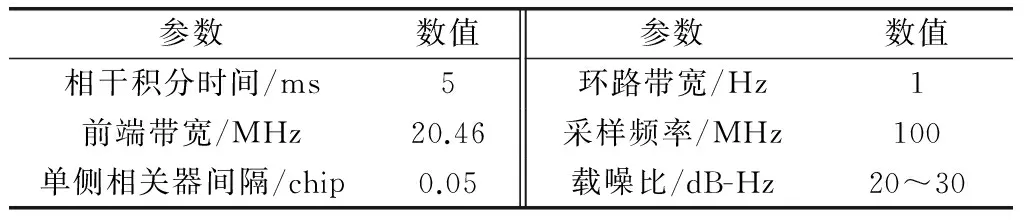
參數(shù)數(shù)值參數(shù)數(shù)值相干積分時間/ms5環(huán)路帶寬/Hz1前端帶寬/MHz20.46采樣頻率/MHz100單側相關器間隔/chip0.05載噪比/dB-Hz20~30
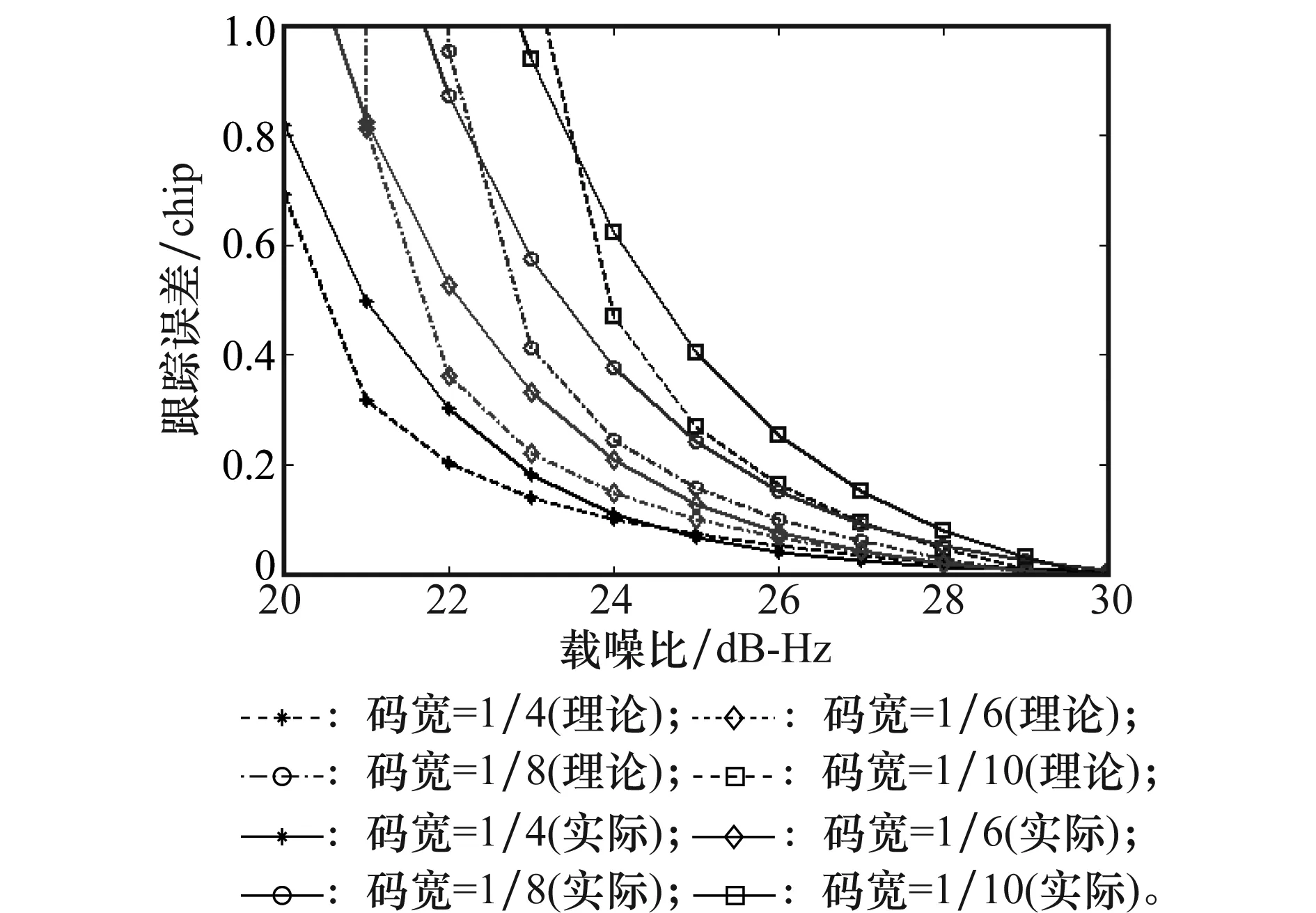
圖9 碼寬與跟蹤誤差Fig.9 Code width and tracking error

如圖10所示,將Tb=Tc/6情況下的所提方法與其他3種方法進行比較。可見傳統(tǒng)雙環(huán)估計方法抗低載噪比的性能最佳,實際上傳統(tǒng)雙環(huán)估計方法可以視為本文所提方法Tb=Tc/2的一種特例,因而其抗低載噪比性能可以視為本文所提方法的理論極限,而本文所提方法抗低載噪比的性能明顯好于雙閘波法,與窄相關方法的性能近似。
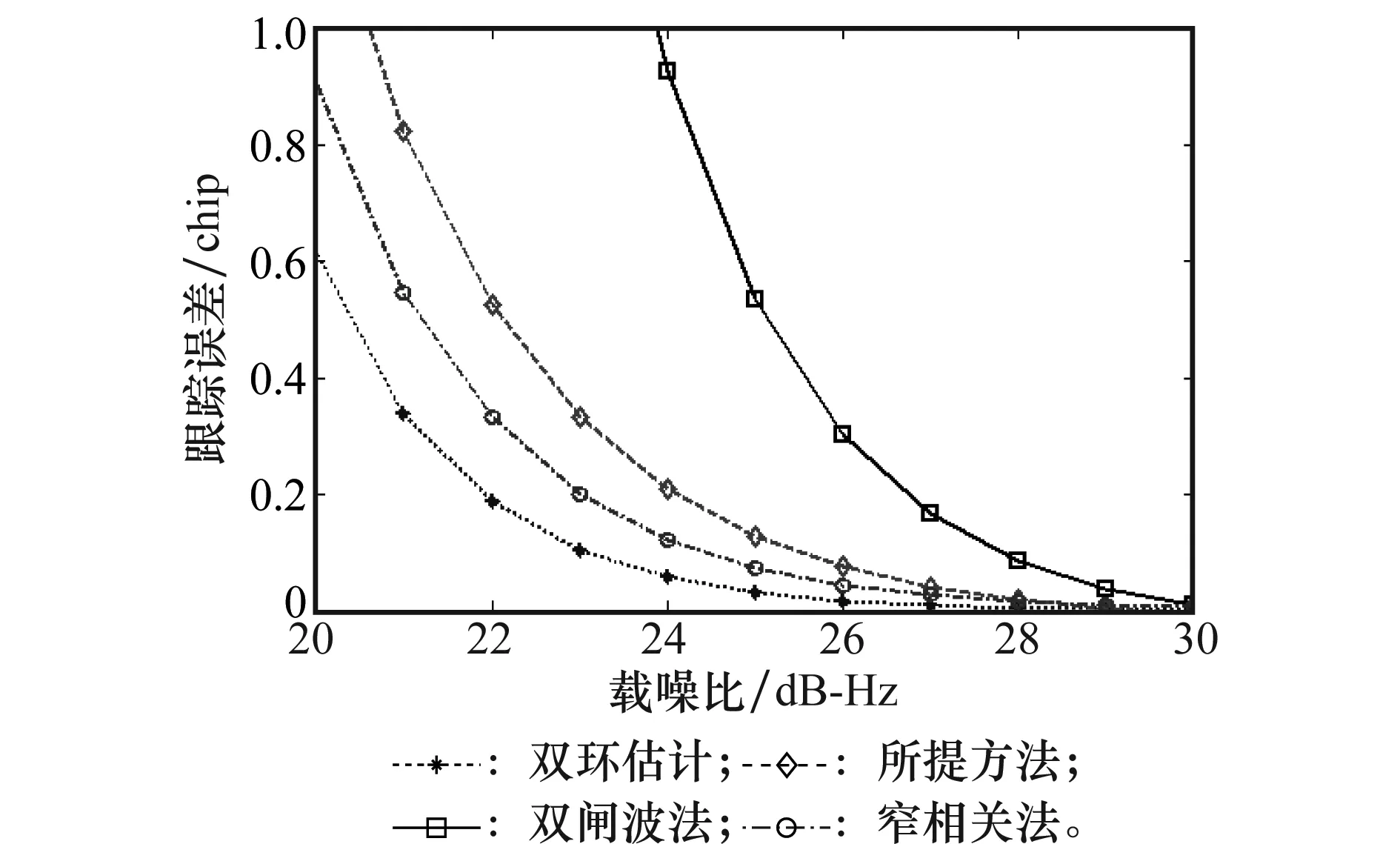
圖10 不同方法的跟蹤誤差Fig.10 Tracking error of different methods
2.3 動態(tài)條件下的性能實驗
為了進一步研究環(huán)路在多普勒變化情況下的動態(tài)誤差,在初始多普勒頻移f0=50 Hz且多普勒速率μ=50 Hz/s的條件下對所提方法和其他3種方法進行仿真,以模擬高動態(tài)條件下的跟蹤過程,其對應的穩(wěn)態(tài)跟蹤誤差如圖11所示。
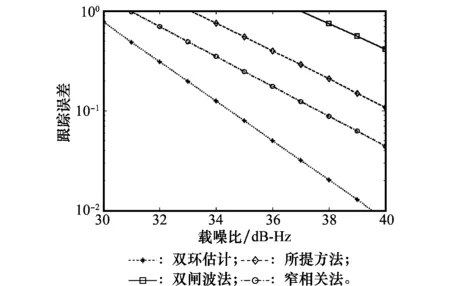
圖11 動態(tài)條件下的跟蹤誤差Fig.11 Tracking error in dynamic condition
由圖11可知,所提方法在動態(tài)條件下的跟蹤誤差大于窄相關法和雙環(huán)估計方法,但明顯好于雙閘波法。這是由于接收機在高動態(tài)條件下的跟蹤性能程度受鑒相函數(shù)的有效寬度的影響,而所提方法以及雙閘波方法出于抗多徑的考慮,縮短了鑒相函數(shù)的有效寬度。為了解決這一問題,所提方法可以在實際的高動態(tài)條件下及時調整Tb的大小,從而增大鑒相函數(shù)的寬度,以適應高動態(tài)條件下的跟蹤需求。
綜合以上實驗結果可知,本文所提方法具備較強的抗多徑性能的同時具備一定的抗低載噪比性能,而在高動態(tài)條件下可以通過調整Tb的大小增強跟蹤性能。因而在實際應用中能夠對BOC調制信號進行穩(wěn)健地跟蹤。
3 結 論
雙環(huán)估計方法是一種穩(wěn)健的BOC調制信號碼相位估計方法,在實際環(huán)境,多徑干擾是GNSS接收機的主要誤差源之一。實際上,本文的工作一方面可以看作是對傳統(tǒng)雙環(huán)估計方法的一種推廣,將本地復現(xiàn)的偽隨機碼轉變?yōu)閮H在每個碼片邊沿出現(xiàn)雙極性歸零碼,并與復現(xiàn)的副載波一同與信號進行二維相關運算,根據(jù)二維相關函數(shù)進行碼相位估計,從而賦予雙環(huán)估計方法較強的抗多徑性能。另一方面,本文的工作也可以視為對于閘波相關方法的一種推廣,將閘波相關抗多徑的思想用于雙環(huán)估計之中,以克服閘波相關方法在低載噪比條件下性能不佳的現(xiàn)實。綜上所述,本文所提方法能夠同時具備無模糊、抗多徑、抗低噪比的特性,可以推廣應用到實際接收機的設計中。
參考文獻:
[1] HODGART M S, BLUNT P D. Dual estimate receiver of binary offset carrier modulated signals for global navigation satellite systems[J]. Electronics Letters, 2007, 43(16):877-878.
[2] BORIO D. Double phase estimator: new unambiguous binary offset carrier tracking algorithm[J]. IET Radar, Sonar & Navigation, 2014, 8(7):729-741.
[3] 張?zhí)祢U,張亞娟,吳旺軍,等.基于改進Rake模型的多徑BOC信號精確捕獲方法[J].系統(tǒng)工程與電子技術,2015,37(3):492-497.
ZHANG T Q, ZHANG Y J, WU W J, et al. Accurate acquisition method of multipath BOC signals based on improved Rake model[J]. Systems Engineering and Electronics, 2015, 37(3): 492-497.
[4] WENDEL J, SCHUBERT F M, HAGER S. A robust technique for unambiguous BOC tracking[J]. Navigation, 2015, 61(3):179-190.
[5] NUNES F D, SOUSA F M G, LEITAO J M N. Gating functions for multipath mitigation in GNSS BOC signals[J]. IEEE Trans.on Aerospace & Electronic Systems, 2007, 43(3):951-964.
[6] GOMEZ-CASCO D, GARCIA-MOLINA J A, GUSI-AMIGO A, et al. Mitigation of false locks in the acquisition of high-order BOC signals in HS-GNSS receivers[C]∥Proc.of the International Conference on Localization and GNSS, 2016:1-6.
[7] XU C, LIU Z, TANG X, et al. A design method of code correlation reference waveform in GNSS based on least-squares fitting[J]. Sensors, 2016, 16(8):1194-1230.
[8] LIU Z, PANG J, LIU Y, et al. Double strobe technique for unambiguous tracking of TMBOC modulated signal in GPS[J]. IEEE Signal Processing Letters, 2015, 22(12):2204-2208.
[9] FENG T, KAI Z, LIANG C. Unambiguous tracking of BOC signals using coherent combination of dual sidebands[J]. IEEE Communications Letters, 2016, 20(8):1555-1558.
[10] GARICA-MOLINA J A, NAVARRO-GALLARDO M, LOPEZ-RISUENO G, et al. Unambiguous tracking of high-order BOC signals in urban environments: channel considerations[C]∥Proc.of the IEEE Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing, 2015:1-6.
[11] HODGART M S, SIMONS E. Improvements and additions to the double estimation technique[C]∥Proc.of the IEEE Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing, 2013:1-7.
[12] REN J, JIA W, CHEN H, et al. Unambiguous tracking method for alternative binary offset carrier modulated signals based on dual estimate loop[J]. IEEE Communications Letters, 2012, 16(11):1737-1740.
[13] 曲博,魏蛟龍,嚴濤,等.基于雙環(huán)估計的CBOC調制信號無模糊跟蹤方法[J].華中科技大學學報(自然科學版),2014,42(8):58-62.
QU B, WEI J L, YAN T, et al. Unambiguous tracking method for CBOC modulated signal based on dual estimate[J]. Journal of Huazhong University of Science and Technology(Natural Science Edition), 2014,42(8):58-62.
[14] 周兵, 高揚, 崔曉偉,等. 帶限BOC信號下雙重估計技術多徑性能分析[J]. 無線電通信技術, 2015(5):36-40.
ZHOU B, GAO Y, CUI X B, et al. Analysis on multipath performance of dual estimate technology for band-limited BOC signals[J]. Radio Communications Technology, 2015(5):36-40.
[15] XIN C, YU M. Iterative subspace alternating projection method for GNSS multipath DOA estimation[J]. IET Radar, Sonar & Navigation, 2016, 10(7):1260-1269.
[16] BETZ J W. Engineering satellite-based navigation and timing: global navigation satellite systems, signals, and receivers[M].New Jersey: Wiley, 2016:157-405.
[17] BYUN S H, HAJJ G A, YOUNG L E. Development and application of GPS signal multipath simulator[J]. Radio Science, 2016, 37(6):1-23.
[18] LIU Z, LI B, TANG X, et al. Unambiguous s-curve shaping for multipath mitigation for MBOC modulated signals in GNSS[C]∥Proc.of the IEEE International Conference on Wireless Communications & Signal Processing, 2015:1-5.
[19] BETZ J W, KOLODZIEJSKI K R. Generalized theory of code tracking with an early-late discriminator part I: lower bound and coherent processing[J]. IEEE Trans.on Aerospace & Electronic Systems, 2010, 45(4):1538-1556.
[20] BETZ J W, KOLODZIEJSKI K R. Generalized theory of code tracking with an early-late discriminator part II: noncoherent processing and numerical results[J]. IEEE Trans.on Aerospace & Electronic Systems, 2010, 45(4):1557-1564.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
