基于微動測量原理的高速船艏部結構運動規律研究
2018-04-26 01:41:14鄭如炎牟金磊
中國修船 2018年1期
邱 磊,鄭如炎,彭 飛,牟金磊
(1.海軍駐葫蘆島四三一廠軍事代表室,遼寧 葫蘆島 125000 ; 2.海軍工程大學,湖北 武漢 430033)
海上高速船[1]是指設計靜水時速在海上超過25 kn的一類高性能船舶,具有優良的操縱性、耐波性、快速性與穩定性,主要類型[2]包括滑行艇、水翼船、氣墊船、地效翼船等。我國自主設計制造的海上高速船正朝著大型化、實用化發展。
海上高速船在高速航行時,艏部結構不斷遭受到砰擊載荷[3]與波浪載荷作用,若船首空艙結構以整體運動為主,位移方向上存在一致性,即出現“懸臂梁效應”,相反,若船首空艙結構以局部運動為主,位移方向上不存在一致性,即未出現“懸臂梁效應”。當船首結構出現所謂的“懸臂梁效應”時,由于海上高速船,尤其是雙體船的特殊性,其在受到橫向力作用下會在“懸臂梁”根部產生支反力,這往往會導致船首結構發生疲勞裂紋、變形等威脅[4],嚴重危害船舶與船員的安全。因此,有必要對海上高速船艏部空艙結構運動規律進行研究。
首先以某海上高速船為試驗樣船,將微動測量點安裝在試驗樣船艏部結構的典型位置,然后通過微動測量系統測量不同工況下船首片體某縱向構件典型位置位移變化情況,進而對艏部結構運動規律進行研究探討。
1 微動測量系統基本原理
1.1 微動測量系統原理
位移微動測量系統[5]是以攝影測量學為基礎,主要利用Multipoint軟件對測量數據進行實時自動采集與存儲,并采用亞像素定位技術對相機坐標系下的系統拍攝的圖像進行世界坐標系下的旋轉、平移等轉化計算,進而得到測點在三維世界坐標系下的幾何與運動參數。
1.2 精度估算
當試驗儀器穩定且測量環境良好,測量精度[6]主要取決于系統拍攝圖像的放大倍數以及標志點提取的精度。
試驗中位移微動測量系統采用分辨率為1 280×1 024的圖像,儀器視場角為±15′,標志點提取的精度為0.2個像素。通過計算可得測量結果的誤差僅為0.1 mm,可以保證測量結果的可靠性。
2 實船試驗
2.1 測點布置
試驗中對船首片體內舷4個肋位區間內某縱向構件4個位置進行位移監測。根據現場勘測,#28肋位結構較穩定,變形小,故試驗中將初始微動測量儀固定在#28肋位。實際測量中,由于微動測量儀的角度問題,不能直接準確測量測點4的位移情況,故增設一個轉接微動測量儀,位于#25肋位,具體測點位置如表1所示。4個測點位置的整體分布如圖1所示。

表1 片體內舷某縱骨測點位置表

圖1 4個測點的整體分布示意圖
從圖1中不難發現,實際測點位置均采用標靶定點的方法進行標定,各測點的十字相交的黑點為實際測量點,測量船首片體內舷橫向(x方向)和縱向(y方向)的位移變化。
2.2 試驗工況
試驗共分為2個航次的試驗,分別為低海況下(3級海況以下)和高海況下(4級海況以上)的實船試驗。低海況和高海況試驗中,試驗樣船均相對于波浪取4個浪向角:0°、45°、135°以及180°,低海況航次試驗工況如表2所示,高海況航次試驗工況如表3所示。各航向測試時間為15 min,試驗航向圖如圖2所示。
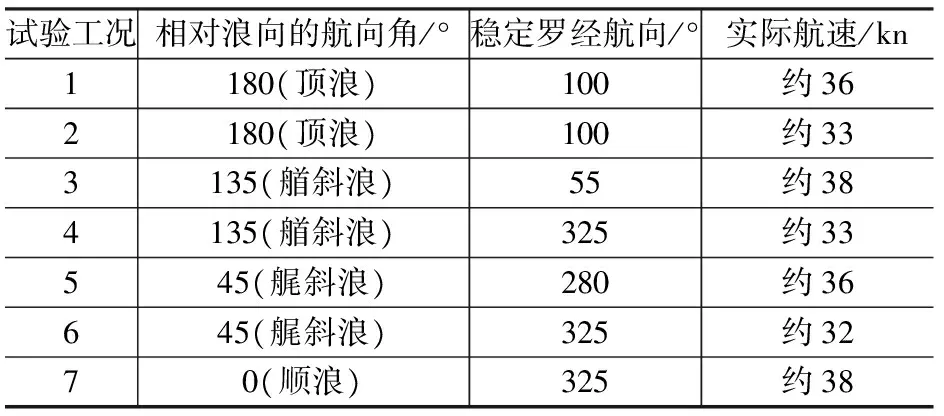
表2 第一航次試驗工況(低海況下)

表3 第二航次試驗工況(高海況下)

圖2 試驗航向簡圖
3 試驗結果與分析
對試驗數據進行分析,若4個測點在多數時刻應該出現相同方向的位移,且距離參考艙壁越遠,位移應該越大,則船首空艙結構以整體運動為主,即出現“懸臂梁效應”。相反,若4個測點的運動以局部運動為主,位移方向上不存在一致性,位移測量值不具有明顯的變化規律,則未出現“懸臂梁效應”。試驗數據分析流程如圖3所示。

圖3 船首運動規律分析流程
3.1 測點位移時程曲線
通過對微動測量儀采集的圖像信息進行處理,可得到不同工況下各測點的位移時程數據,以第一航次工況1為例,測點1的位移時程曲線如圖4所示。鑒于篇幅關系,該工況下其他測點以及其他工況下各測點的位移時程曲線未列入本文中。

圖4 測點1測試結果
3.2 位移時程曲線的濾波處理
對于各測點的位移時程曲線,原始數據中存在大量不可忽略的噪聲數據,這些噪聲會對實驗結果產生誤差,影響試驗準確性以及精度,所以需要對原始數據進行濾波等技術處理[7]。以第一航次工況1為例,經過濾波處理的數據基本保持了數據的變化趨勢和幅值,以0~1 000 s區間和40~60 s區間為例,其數據處理前后對比分別見圖5和圖6所示。

圖5 0~1 000 s期間數據處理前后對比圖

圖6 40~60 s期間數據處理圖(濾波前后數據對比)
3.3 空艙結構變形響應模式分析
為分析船首結構運動規律,需要對船首空艙結構在航行中的變形模式進行研究。為確定船首結構的響應模式,在數據處理過程中,選取了大量的時刻,對比同一時刻下4個測點的變形情況,選取部分如圖7所示。試驗研究表明,各測點在大多數時刻,未出現“懸臂梁效應”,即未呈現明顯的整體運動趨勢。
4 結束語
通過對某試驗樣船艏部片體縱向構件典型位置不同工況下位移變化情況、空艙結構變形響應模式進行初步分析,可以得到如下結論。
1)試驗中測得4個測點的位移以局部運動為主,整體運動趨勢不明顯,船首結構未出現明顯的“懸臂梁效應”,無需考慮支反力的影響。
2)對海上高速船艏部結構運動規律的研究,可以證明船首結構主要以局部損傷為主,試驗結果可為艏部結構疲勞裂紋、變形等機理研究及局部優化提供參考。
3)基于微動測量原理的位移測量系統可為船體結構位移測量提供新思路。

圖7 某時刻測點位移變形情況
[1]曹懷昌.“雜交”型海上高速船[J].航海,1993(5):34-35.
[2]OddM.Faltinsen.海上高速船水動力學[M].北京:國防工業出版社,2007.
[3]謝仁杰,董能超,王珂.船舶首部結構入水砰擊過程研究[J].艦船科學技術,2017,39(1):21-25.
[4]任慧龍,翟帥帥,于鵬垚,等.砰擊載荷作用下船首結構瞬態響應研究[J].中國艦船研究,2013,8(6):14-19.
[5]于起峰,尚洋.攝像測量學原理與應用研究[M].北京:科學出版社,2009.
[6]范緒奇,徐沖.遠程微動測量儀在結構健康監測中的應用[J].測繪地理信息,2012,37(4):34-36.
[7]鐘萍,丁曉利.GPS結構振動監測數據濾波方法及其性能實驗研究[J].測繪學報,2007,36(1):31-36.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
現代企業(2015年9期)2015-02-28 18:56:50
