PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的制備及其運動性能
2018-04-25 01:24:07姜玉周蘇京北查奉君官建國
中國粉體技術 2018年2期
姜玉周,蘇京北,查奉君,羅 明,官建國
(武漢理工大學材料科學與工程國際化示范學院,材料復合新技術國家重點實驗室,湖北武漢 430070)
微納米馬達(micro/nanomotors,MNMs)是一種可以將外界環(huán)境中其他形式的能量(如化學能、外場能以及生物能等)轉化為自身動能獲得驅動力,從而實現(xiàn)其在微納米空間內自主運動的微納米器件[1-3]。基于這種自主運動特性以及較為靈活的控制方式,微納米馬達已經在環(huán)境監(jiān)測[4]、生物傳感[5-6]以及微創(chuàng)手術[7]等方面展現(xiàn)了巨大的應用前景。
近幾十年來,隨著研究的不斷深入,不同形狀的微納米馬達(如棒線狀[8]、管狀[9]、Janus 球狀[10]以及不規(guī)則形狀[11]等)層出不窮。在這些現(xiàn)有的微納米馬達中,具有中空結構的氣泡驅動型管狀微納米馬達,由于其具有較大的驅動力以及易于表面功能化的特性[12-13],引起了眾多科研工作者的廣泛關注及深入研究。也正是由于這些優(yōu)勢,氣泡驅動的管狀微納米馬達在環(huán)境領域以及生物傳感領域具有舉足輕重的地位[14]。為了進一步拓展其應用范圍,將管狀微納米馬達表面進行功能化是一種較為理想的方法,其中制備出表面具有官能團(如羥基、羧基和氨基)的管狀微納米馬達是這種方法中最為關鍵的一步。就當前現(xiàn)狀而言,氣泡驅動型管狀微納米馬達的制備方法中,以模板法和卷曲法最為常見。其中,模板法由于具有制備工藝簡單,產物形狀多樣、結構均一和可批量生產等優(yōu)點,備受科研工作者的青睞。
鑒于此,本文中采用模板輔助的電化學沉積法制備得到單錐型的PPy—COOH/PPy/Ni/Pt多層管狀微米馬達,并研究電化學沉積的電壓和電鍍液聚合物的單體濃度對管狀微米馬達形貌的影響,燃料濃度對其運動速率的影響規(guī)律以及外部磁場對運動方向的控制。得到的管狀微米馬達可通過進一步的表面功能化,有望作為一種較為廉價的功能器件更好地應用在生物醫(yī)學以及環(huán)境領域中。
1 實驗
1.1 試劑與儀器
試劑:吡咯(Py,純度≥98.0%,質量分數(shù),下同),氨基磺酸鎳(II)四水合物(Ni(SO3NH2)2·4H2O,純度 ≥95.0%),硼酸(H3BO3,純度≥99.5%),曲拉通X-100(純度≥99.0%),鹽酸(HCl,36.4%),無水乙醇(純度 ≥99.2%)和過氧化氫溶液(H2O2,30%,體積分數(shù))均購自國藥集團化學試劑有限公司;硝酸鉀(KNO3,純度 ≥99.0%),氯化鎳(II)(NiCl2,純度≥98.0%),六水合氯鉑酸(H2PtCl6·6H2O,純度≥37.5%)購自西格瑪奧德里奇(上海)貿易有限公司;3-吡咯羧酸(Py—COOH,純度≥95.0%)購自上海阿拉丁生化科技股份有限公司;聚碳酸酯(PC)膜(孔徑 2 μm)購自美國Whatman公司;實驗用水由美國Milli-Q超純水系統(tǒng)提供。
儀器:電化學工作站(PGSTAT 302N,瑞士萬通);倒置光學顯微鏡(DMI3000,德國徠卡有限公司);離子濺射儀(Hitachi E-1010,日立集團);掃描電子顯微鏡(SEM)(Hitachi S-4800,日立集團);X射線顯微分析系統(tǒng)(能譜儀)(EDS)(X-Max 50型電制冷能譜儀,英國牛津儀器公司)。
1.2 PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的制備
如圖 1所示,PPy—COOH/PPy/Ni/Pt多層管狀微米馬達是利用模板輔助的電化學沉積法制備的。具體過程如下:以孔徑為2 μm的聚碳酸酯膜為模板,利用離子濺射儀在該膜的一側濺射一層75 nm的金層并將其作為工作電極,并用鋁箔紙作為3電極體系的引出電極,飽和KCl的Ag/AgCl電極作為參比電極,鉑絲電極作為對電極,將這3個電極組裝進電解池中備用。之后依次沉積管狀馬達的每一層物質,如圖1步驟a,首先用含有74 mmol/L 3-吡咯羧酸,15 mmol/L KNO3和 質量分數(shù)為1%的曲拉通 X-100的電鍍液,在恒定電位+0.806 V的條件下電沉積8 000 s形成PPy—COOH外層;之后,用含有74 mmol/L吡咯,15 mmol/L KNO3和1%曲拉通X-100的電鍍液,在恒定電位+0.806 V的條件下電沉積0.5 C形成PPy層;然后,內部金屬層采用Pt-Ni混合電鍍液電沉積得到,該混合電鍍液由相同體積的Pt電鍍液(20 mmol/L H2PtCl6和 100 mmol/L HCl)和 Ni電鍍液(84 mmol/L NiCl2,1.42 mol/L Ni(H2NSO3)2·4H2O 和 287 mmol/L H3BO3)混合而成。先在恒定電流-2 mA的條件下電沉積600 s沉積首層Pt層,該Pt層提供了一個光滑的高導電性的表面以便沉積下一層金屬。繼續(xù)在恒定電位-1.3V條件下電沉積60 C形成Ni層,使管狀馬達的運動可通過外部磁場控制。最后,在恒定電流-2 mA的條件下電沉積3 000 s沉積形成Pt內層。

圖1 利用模板輔助的電化學沉積法制備PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的示意圖Fig.1 Schematic illustration of preparation of PPy—COOH/PPy/Ni/Pt multilayer tubular micromotors via a template-assisted electrodeposition method
電化學沉積完成后,利用粒徑5~6 μm的氧化鋁漿料手動機械打磨除去膜表面濺射的Au層,然后將膜浸于CH2Cl2中溶解15 min以便完全釋放馬達,用離心收集微納馬達,再用CH2Cl2溶解3次離心收集后,再分別用無水乙醇和超純水重復洗滌多次,最終高速離心分離得到管狀微納米馬達,將其室溫儲存在超純水中備用。
1.3 PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的表征及運動性能測試
使用場發(fā)射掃描電子顯微鏡(SEM)觀察管狀微米馬達的微觀形貌(加速電壓為10 kV,工作距離為8 mm),并通過X射線顯微分析系統(tǒng)(能譜儀)(EDS)對其元素分布進行分析。利用倒置熒光顯微鏡觀察并記錄管狀微米馬達的運動情況。
1.4 利用TMB-HRP顯色反應驗證管狀微米馬達外層的羧基
采用 3,3′,5,5′-四甲基聯(lián)苯胺-辣根過氧化物酶(TMB-HRP)的顯色反應驗證管狀微米馬達外側存在羧基[15]。首先,在2個離心管A和B中依次加入等量的管狀微米馬達和兩端分別修飾氨基和生物素的DNA鏈,振蕩30 min后,B中加入19.2 mg/mL的1-(3-二甲氨基丙基)-3-乙基碳二亞胺鹽酸鹽(EDC)和11.5 mg/mL的N-羥基丁二酰亞胺(NHS),A中加入與偶聯(lián)劑等量的磷酸(PB)緩沖溶液(10 mmol/L PB,pH 7.4);振蕩反應過夜,用磷酸緩沖溶液(10 mmol/L PB,pH 7.4)洗滌管狀馬達(偶聯(lián) DNA 后)3次;加入100 μL辣根過氧化物酶標記鏈霉親和素(SA-HRP)(200 ng/mL),在恒定溫度37℃下振蕩孵育30 min,并用PB緩沖溶液(10 mmol/L PB,pH 7.4)洗滌多次;最后,加入 100 μL 3,3′,5,5′-四甲基聯(lián)苯胺(TMB),室溫下靜置顯色1 h后觀察離心管A和B中溶液的顏色變化。
2 結果與討論
2.1 PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的形貌和成分表征
圖2a為在最優(yōu)條件下制備的PPy—COOH/PPy/Ni/Pt管狀微米馬達的較低放大倍率(400倍)的SEM圖像,圖2b、2c分別為馬達的頂部和側面高倍率(7 000倍)的SEM圖,圖2d為管狀微米馬達EDS面掃元素分析圖。在SEM圖像中可以直觀地觀察出,制備的管狀微米馬達均為中空的單錐型結構,其平均身長約為10 μm,管壁壁厚約為180 nm,并可看出管狀微米馬達具有光滑的外表面和粗糙的內表面,這也間接表明聚合物層和金屬層電化學沉積過程均是成功的。此外,通過對管狀微米馬達進行EDS面掃元素分析,可以看出,制備的管狀微納米馬達中含有C、N、Ni、Pt元素,且這4種元素較為均勻地分布于管狀微米馬達,由此也進一步證明PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的成功制備。

圖2 PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的SEM圖像和單個馬達的EDS面掃元素分析圖像Fig.2 SEM images and EDX elemental mapping analyses images of PPy—COOH/PPy/Ni/Pt multilayer tubular micromotors
2.2 PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的化學基團表征
基于TMB-HRP顯色反應進一步確認管狀微米馬達外表面上存在羧基,其實驗結果如圖3所示。與不加偶聯(lián)劑(NHS和EDC)的離心管A中溶液相比,添加偶聯(lián)劑的離心管B中溶液呈現(xiàn)出明顯的墨藍色,該實驗結果表明,制備的管狀微米馬達外表面上含有羧基。其反應原理如下:首先利用碳二亞胺化學法將兩端分別修飾氨基和生物素的DNA鏈成功偶聯(lián)到管狀馬達的外側[16],利用生物素-鏈霉親和素之間的相互作用管狀微米馬達上的生物素成功捕獲SA-HRP,使管狀馬達外側上的辣根過氧化物酶HRP在H2O2存在的條件下,發(fā)生催化反應并進一步氧化TMB,生成呈墨藍色的氧化TMB。
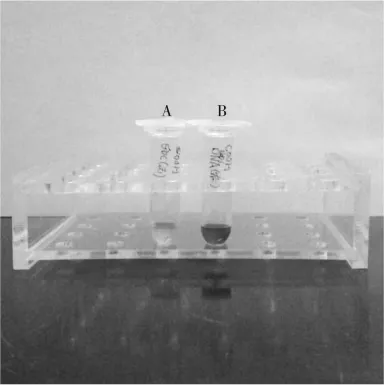
圖3 TMB-HRP顯色反應的光學照片F(xiàn)ig.3DigitalphotoofTMB-HRP-basedcolorimetricmethod
2.3 PPy—COOH/PPy/Ni/Pt多層管狀微米馬達聚合物外層的形貌優(yōu)化
管狀微納米馬達的運動性與其形貌特征息息相關。為了使管狀微米馬達具備更好的運動性能,要求管內鉑層催化雙氧水產生的氣泡更易從管腔內排出,為此制備規(guī)整的單錐型管狀馬達尤為關鍵。為了得到形貌良好的單錐型管狀微米馬達,優(yōu)化了電化學沉積聚吡咯過程中的電荷沉積量和電鍍液單體濃度。
在恒定電壓法沉積聚吡咯層的過程中,研究不同電荷沉積量對管狀馬達形貌的影響。不同電荷沉積量制備的管狀馬達聚合物外層的SEM圖像如圖4所示。由圖可知,在恒定電壓法沉積的過程中,隨著電荷沉積量的增加,管狀微米馬達的身長明顯增加。在電化學沉積過程中,由于聚合物和孔壁間的靜電作用和疏溶作用,單體將沿孔壁進行聚合,當電鍍液單體濃度一定時,隨著電荷沉積量增大,單體沿孔壁進行聚合的時間也會增長,進一步使得管狀馬達的身長增加。當電荷沉積量為0.5 C時,可以得到單錐型管狀微米馬達。因此,在本實驗中選擇優(yōu)化的電荷沉積量為0.5 C。
在恒定電壓法沉積聚吡咯層的過程中,研究其電鍍液不同的單體濃度對管狀微米馬達形貌的影響。不同電鍍液單體濃度制備的管狀馬達聚合物外層的SEM圖像如圖5所示。當電鍍液單體濃度為18 mmol/L時,產物中只有部分碎片;當電鍍液單體濃度增加到37 mmol/L時,馬達雖有成管的跡象,但管壁很薄;當電鍍液單體濃度進一步增加到74 mmol/L時,管狀微米馬達成管的形貌較好,絕大部分呈現(xiàn)單錐型管狀結構。這是由于在該沉積電壓為+0.806 V的條件下,沉積等量電荷量時,當單體濃度較高時,充足的單體有足夠的時間在孔內沿孔壁聚合,進而形成較好的管狀形貌;當單體濃度較低時,單體濃度不足以滿足聚合物沿孔壁生長,因而不能形成規(guī)整的管狀形貌。因此,本實驗選擇的優(yōu)化電鍍液單體濃度是74 mmol/L。
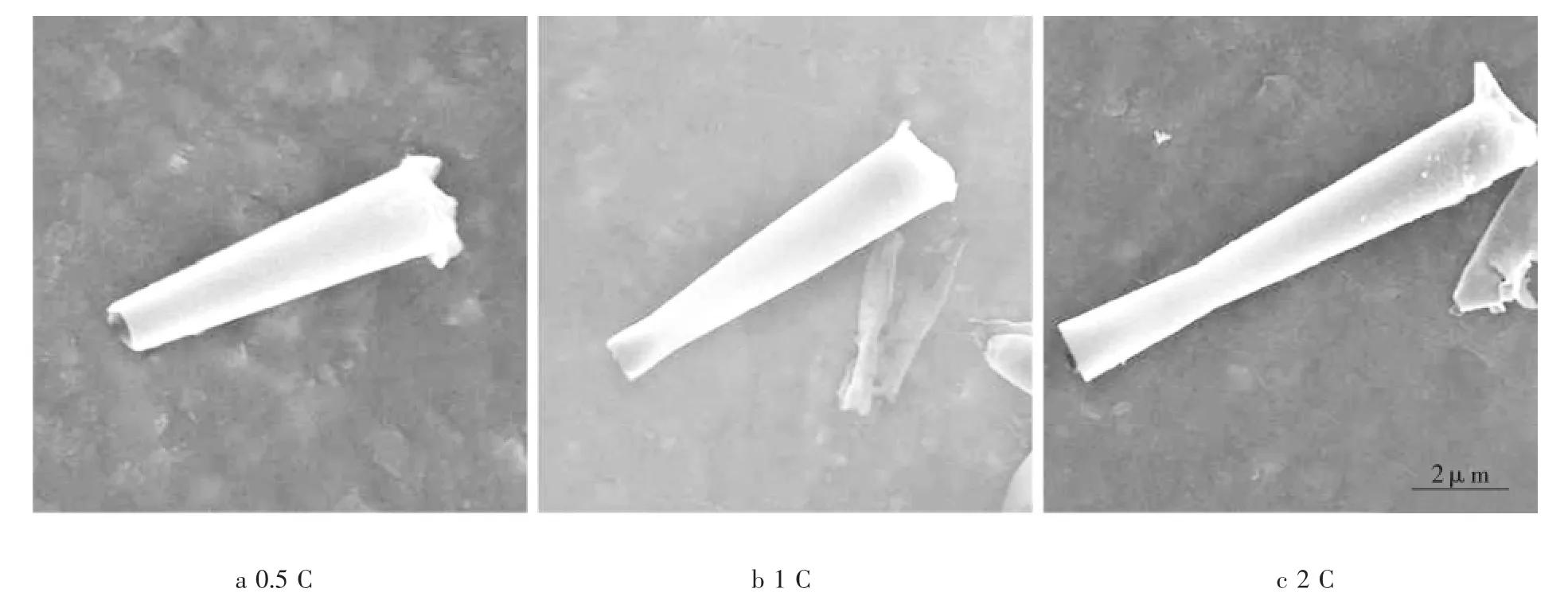
圖4 不同電荷沉積量制備的管狀馬達聚合物外層的SEM圖像Fig.4 SEM images of outer polymer layer of obtained micromotor at different charge deposition

圖5 不同電鍍液單體濃度制備的管狀馬達聚合物外層的SEM圖像Fig.5 SEM images of outer polymer layer of obtained micromotor at different monomer concentration of plating liquid
以上的實驗結果表明,為了制備出形貌良好的單錐型管狀微米馬達,電化學沉積PPy層的電荷沉積量和電鍍液的單體濃度分別應為0.5 C和74 mmol/L。
2.4 PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的運動性能
PPy—COOH/PPy/Ni/Pt多層管狀微米馬達在含有H2O2和曲拉通X-100的燃料池中,其內層惰性金屬Pt分解H2O2產生O2氣泡,氣泡在管狀微米馬達管腔內部逐漸長大,并從微米管大口端脫離。根據(jù)動量守恒定理,氣泡在脫離微米馬達的同時會產生一個反推力,該力可克服微米馬達在溶液中的黏滯阻力進而驅動管狀微米馬達運動。基于此,在這個工作中考查了PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的自主運動性能,如圖6a所示,展示了馬達1 s內在含有3%H2O2和0.6%曲拉通X-100的溶液中運動的時序圖,在該條件下,這種微米馬達的運動速率即可達到419 μm/s。眾所周知,燃料池中雙氧水的濃度直接影響到PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的運動速率。如圖6b所示,隨著H2O2濃度的增加,其運動速率也隨之增大:在1%H2O2和0.6%曲拉通X-100的溶液中,馬達的平均速率為(131±36)μm/s,當燃料池中H2O2體積分數(shù)增加到4%時,馬達的平均運動速率已經增加到了(485±38)μm/s。這種運動速率的增加主要與管腔內Pt催化H2O2產生O2氣泡的頻率有關,當H2O2濃度變大時,氣泡生成的頻率也隨之增大,進一步增大了馬達的運動速率。

圖6 PPy—COOH/PPy/Ni/Pt多層管狀馬達的自主運動時序圖和在不同雙氧水體積分數(shù)下的運動速率Fig.6 Time-lapse images of autonomous motion of PPy—COOH/PPy/Ni/Pt multilayer tubular micromotors at different time intervals.Speed of tubular micromotors versus H2O2volume fraction
2.5 PPy—COOH/PPy/Ni/Pt多層管狀微米馬達運動方向的控制
控制管狀馬達的運動方向是其實現(xiàn)貨物的定向運輸以及藥物靶向治療的前提和保證。在這個工作中,借助電化學沉積技術在PPy—COOH/PPy/Ni/Pt多層管狀微米馬達內層電化學沉積鎳層,成功制備出磁性管狀微米馬達,實現(xiàn)了通過外部磁場的調控進一步控制馬達的運動方向,如圖7所示。

圖7 外部磁場調控PPy—COOH/PPy/Ni/Pt多層管狀微米馬達運動方向的視頻截圖Fig.7 Optical snapshot from a video shows motion direction of PPy—COOH/PPy/Ni/Pt multilayer tubular micromotors with guidance of an external magnetic field
由圖7可觀察到,制備的PPy—COOH/PPy/Ni/Pt多層管狀微米馬達在外部磁場的作用下成功地實現(xiàn)了沿著預訂的路線從位置1運動到位置2再運動到位置3。此外,還可以觀察到,馬達在外部磁場的作用下運動靈活,這一特性正好也為馬達應用于定向運輸領域提供了可能。
3 結論
本文中主要探究了電化學沉積過程中電荷沉積量和電鍍液單體濃度對馬達聚合物外層形貌的影響,燃料濃度對馬達運動性能的影響規(guī)律以及馬達運動方向的控制。通過研究得出如下結論:
1)利用模板輔助的電化學沉積法可成功制備外表面含有羧基的單錐型管狀微米馬達。
2)為制備單錐型PPy—COOH/PPy/Ni/Pt多層管狀微米馬達,電化學沉積聚合物PPy層時的優(yōu)化條件:恒定電壓+0.806 V下,電荷沉積量為0.5 C和電鍍液的單體濃度為74 mmol/L。
3)可通過提高燃料池中過氧化氫的體積分數(shù)進一步提高 PPy—COOH/PPy/Ni/Pt多層管狀微米馬達的運動速率。當燃料池中H2O2體積分數(shù)增加到4%時,馬達的平均運動速率已增加到(485±38)μm/s。
4)通過在管狀馬達內層中電化學沉積鎳層,賦予了其磁性能,實現(xiàn)了通過外部磁場調控進一步控制馬達的運動方向。
參考文獻(References):
[1]孔磊,牟方志,姜玉周,等.自驅動微納米馬達的設計原理與結構簡化方法[J].科學通報,2017,62(Z1):107-121.
[2]XU L L, MOU FZ, GONG H T, etal.Light-driven micro/nanomotors:from fundamentals to applications[J].Chem Soc Rev,2017,46(22):6905-6926.
[3]WANG H,PUMERA M.Fabrication of micro/nanoscale motors[J].Chem Rev,2015,115(16):8704-8735.
[4]OROZCO J,GARCíA-GRADILLA V,D'AGOSTINO M,et al.Artificial enzyme-powered microfish for water-quality testing[J].ACS Nano,2013,7(1):818-824.
[5]YU X P,LI Y N,WU J,et al.Motor-based autonomous microsensor for motion and counting immunoassay of cancer biomarker[J].Anal Chem,2014,86(9):4501-4507.
[6]于曉平,吳潔,鞠熀先.微/納米馬達在生物傳感中的應用[J].化學進展,2014,26(10):1712-1719.
[7]XI W,SOLOVEV A A,ANANTH A N,et al.Rolled-up magnetic microdrillers:towards remotely controlled minimally invasive surgery[J].Nanoscale,2013,5(4):1294-1297.
[8]PAXTON W F,KISTLER K C,OLMEDA C C,et al.Catalytic nanomotors:autonomous movement of striped nanorods[J].J Am Chem Soc,2004,126(41):13424-13431.
[9]SOLOVEV A A,MEI Y F,URE A E B,et al.Catalytic microtubular jet engines self-propelled by accumulated gas bubbles[J].Small,2009,5(14):1688-1692.
[10]MOU F Z,CHEN C R,MA H R,et al.Self-propelled micromotors driven by the magnesium water reaction and their hemolytic properties[J].Angew Chem Int Ed,2013,125(28):7349-7353.
[11]CHEN X L,WU G,LAN T,et al.Autonomous micromotor based on catalytically pneumatic behavior of balloon-like MnOxgraphene crumples[J].Chem Commun,2014,50(54):7157-7159.
[12]GAO W, SATTAYASAMITSATHITS, UYGUN A, etal.Polymer-based tubular microbots:role of composition and preparation[J].Nanoscale,2012,4(7):2447-2453.
[13]ZHA F J,WANG T W,LUO M,et al.Tubular micro/nanomotors:propulsion mechanisms,fabrication techniques and applications[J].Micromachines,2018,9:78.
[14]XU B,ZHANG B R,WANG L,et al.Tubular micro/nanomachines:from the basics to recent advances[J].Adv Funct Mater,2018,28:1705872.
[15]CHY Y W,WANG B Y,LIN H S,et al.Layer by layer assembly of biotinylated protein networks for signal amplification[J].Chem Commun,2013,49(24):2397-2399.
[16]LUO M,LI N X,LIU Y F,et al.Highly sensitive and multiple DNA biosensor based on isothermal strand-displacement polymerase reaction and functionalized magnetic microparticles[J].Biosens Bioelectron,2014,55:318-323.
