GLONASS衛星導航信號模擬與接收驗證軟件開發*
2018-04-20 00:32:08宋茂忠
網絡安全與數據管理 2018年3期
關鍵詞:信號
賁 星,宋茂忠,熊 駿
(1. 南京航空航天大學 電子信息工程學院,江蘇 南京 211106;2.南京航空航天大學 自動化學院,江蘇 南京 211106)
0 引言
由俄羅斯開發維護的全球軌道衛星導航系統格洛納斯(Global Orbiting Navigation Satellite System, GLONASS)作為當前世界第二大衛星導航系統,打破了GPS的壟斷,同時又可以增加可見星數量,以及與GPS聯合定位提高定位精度,在全球衛星導航系統中占有重要地位,引起了各國科研人員的重視[1-2]。
GLONASS衛星導航模擬信號可用于GLONASS系統的仿真實驗,為系統方案提供依據,也可以在偏遠山區等氣候地形條件惡劣、架設天線不便的復雜環境中模擬真實信號,降低天線的架設成本和維護費用。因此GLONASS信號模擬技術研究很有應用價值[3]。
本文實現了基于C++軟件平臺的中頻信號軟件仿真的設計方案,相比于國內已經提出的硬件模擬和采集回放模擬方案具有成本低的優點,同時可以實現用戶任意位置、軌跡等設置,具有一定的動態性能。
1 GLONASS信號的信號結構和基本模型
1.1 信號結構
GLONASS信號由偽隨機碼(也叫測距碼)、導航電文和載波組成。
GLONASS有L1(民用)與 L2(軍用)兩個頻段信號,本文以L1頻段的信號為研究對象。不同于GPS系統,GLONASS系統采取頻分多址技術,即多顆衛星使用相同的偽隨機碼,以不同的頻率播發衛星信號。GLONASS偽隨機碼分為C/A碼(民用)和p碼(軍用),由移位寄存器產生,信號通過高速率的偽隨機碼進行擴頻調制,拓寬帶寬,可靠性更高,抗干擾能力更強。GLONASS導航電文以串為最基本的結構單元。一個字符串由導航數據與明德碼模二加得到,15串為一幀,5幀為一超幀,每個超幀2.5 min。一超幀包含完整的衛星信息。
1.2 信號模型
GLONASS信號將導航電文和C/A碼進行模二加,再通過二進制相移鍵控調制方式調制至L1頻段的載波上,那么在t時刻第i顆GLONASS衛星信號表達式為[4]:
(1)

從衛星發射到被接收機接收的整個過程中存在傳播誤差的多顆衛星導航信號可以表示為:

(2)
式中,τi表示第i顆衛星信號的傳播延時,Δf表示多普勒頻移,n(t)表示噪聲。如果τi過大,會導致系統誤差大,定位精度低;如果Δf過大,會導致衛星信號載波環路失鎖,無法捕獲跟蹤。由此可見,信號延時和多普勒頻移影響信號的性能,是整個模擬源設計的重點。
2 信號生成算法實現
2.1 偽距計算
衛星信號經過空間傳播后,由于衛星與接收機之間時鐘不同步引入的衛星鐘差以及經過對流層和電離層時產生的誤差,其偽碼、載波與衛星發射時刻相比發生了延時,測量出的真實距離并非衛星到接收機的直線長度。將實際測量出的距離稱為偽距[5]。
偽距ρ(t)定義為用戶接收時間tu(t)與信號發射時間tT之差與光速c的乘積,即:
ρ(t)=c(tu(t)-tT(t-τ))
(3)
其中,t由接收機獲得,tT由接收機對信號中C/A碼的碼相位的解算中獲得。
當接收機在t時刻接收到第i顆GLONASS衛星在tT時刻發送的衛星信號時,其信號傳播時延表示為:
(4)
式中,ΔtT表示衛星鐘差,Δtr表示運動相對論效應產生的誤差,Δτion表示電離層誤差,Δτtrop表示對流層折射誤差,Δτch表示硬件通道內的延遲。轉換上式可得到以衛星發射時刻為參考的模擬信號發射時刻,即:
(5)
式中,R表示為衛星與接收機之間的距離,由衛星和接收機的位置坐標計算可得。
由式(5)可知,發射時刻tT與幾何距離R之間存在線性關系,所以可以通過對tT不斷地收斂迭代獲得一定精度的發射時刻。
(6)
當|Ri-Ri-1|<ξ時,即可完成迭代,獲得符合精度要求的模擬源信號發射時刻,生成精確偽距。
2.2 多普勒現象模擬
在衛星的傳播過程中,衛星與接收機之間存在相對運動,產生多普勒頻移fd,這就使得接收端接收到的頻率fr偏離了原始發送的頻率f。
在模擬信號的設計中,為了精確地模擬多普勒頻移的非線性變化,可以模擬傳播時延的三階變化率,計算出每個時間點的精確時延,最終通過載波傳播時延實現時變的多普勒頻移,信號生成中的載波模擬即可表示為:
carrieri(t)=cos(2×π×(fi×t-fL1×tc)
(7)
其中,t為以采樣時間為間隔的采樣序列,fi為第i顆衛星的中頻頻率,fL1為L1頻段的射頻頻率,tc是含有傳播時延的載波傳播時間。
將ρ(t)用麥克勞林展開式展開,設ρ(t)在t=0處n階連續可導,則:
(8)
其中ρ0為初始偽距,ρ′,ρ″,ρ?,…,ρ(n)為偽距的各階導數,分別代表偽距的各階變化率,Rn(t)代表tn的高階無窮小。
由于用戶位置設置為靜止狀態,采用三階多項式來描述偽距,即式中低階項,將衛星與用戶接收機之間的相對運動描述為下式:
(9)
設t1=0,則t2=Δt,t3=2Δt,t4=3Δt,步長Δt越小精度越高,一般Δt取1 s就可以保證參數的平穩變化。
對式(9)進行轉換并用矩陣表示可以得到:
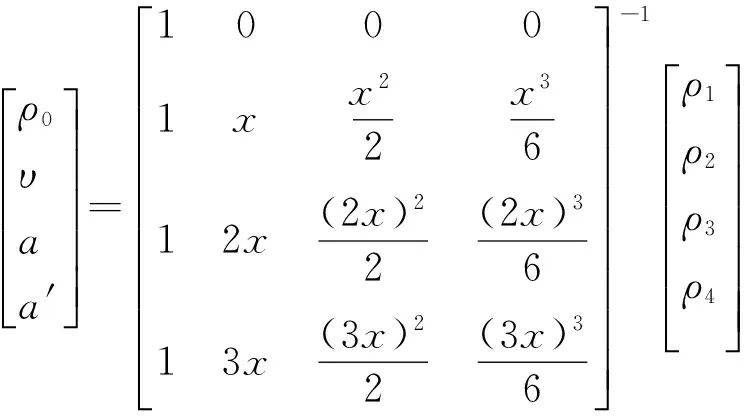
(10)
其中,ρ0、υ、a、a′分別為t1時刻的偽距、相對運動速度、加速度以及加加速度;ρ1、ρ2、ρ3、ρ4為相鄰時刻的偽距。
偽距值對應相應的時延,經2.1節計算出信號精確的發射時刻后,由上式擬合可以計算任何時刻的時延,將時延代入式(7)即可模擬多普勒頻移[6-7]。
2.3 衛星軌道位置計算
GLONASS系統與GPS系統還有一個區別就是,GPS由導航電文中給出衛星運行軌道的開普勒參數來計算位置,而GLONASS的衛星位置是由星歷給出,衛星在PZ-90坐標系中的坐標、速度以及日月攝動加速度,通過受力模型積分而來。
(11)

四階龍格-庫塔法的計算方法為:
(12)
(13)
式中,h為積分步長;k1,k2,k3,k4為方程的中間變量;vi,vi+1為每次積分前后的結果。
積分步長和積分時長在很大程度上影響了龍格-庫塔算法的計算精度,因此,需要綜合考量積分步長和積分長度來選擇合適的參數進行軌道積分。衛星信號模擬源的設計允許一定的誤差,并不要求積分出的衛星位置和實際位置完全相同,只要保證各衛星的相對位置符合衛星星座設計要求即可[8-10]。本設計中采用步長為1 s、積分時長為30 min。
3 仿真及驗證
3.1 模擬信號的生成
本設計中將GLONASS信號的參數設置如下:
(1)載波中頻4.5 MHz,采樣率20 MHz;
(2)用戶位置為東經118.79°,北緯31.94°;
(3)用戶時間為2017年7月20日,此時可見星有1,5,6,7,10,11,13,14號,即-7,-3,-2,-1,2,3,5,6八個頻道的衛星;
(4)模擬時長為180 s。
中頻信號生成步驟主要包括C/A碼、導航電文生成,衛星位置計算,傳播時延計算,中頻信號合成。
首先輸入生成信號所需參數;第二步通過移位寄存器生成C/A碼序列;第三步由OEMStar 接收機采集導航數據,提取導航數據中的有用信息,根據相應格式進行編碼成幀,生成導航電文; 第四步計算衛星位置、傳播時延、模擬多普勒頻移,最后將導航電文、C /A 碼按照時序調制到對應載波上,合成多顆衛星的中頻信號,將其進行 8 bit 量化后寫入DAT格式的信號文件。
用MATLAB對生成的信號文件進行功率譜分析,如圖1所示,可以看到信號中包含的可見星在GLONASS的L1頻段的分布情況。

圖1 GLONASS信號功率譜
3.2 軟件接收機驗證
GLONASS軟件接收機操作方便,調試簡單,是驗證GLOASS信號可靠性的重要工具。本文中使用的GLONASS軟件接收機是基于俄羅斯在Scilab平臺上研發的開源接收機SoftGNSS改寫的,分析數據方便,靈活度高。
軟件接收機處理導航信號是對信號的逆結算過程,主要分為信號捕獲跟蹤、導航電文解算、偽距計算、衛星位置計算與定位5步。首先,軟件接收機對輸入的中頻信號基于快速傅里葉變換快速相關進行粗略捕獲,獲得可見衛星頻道,然后精確捕獲出載波頻率和碼相位偏移;根據精捕的結果對信號進行跟蹤;對每個可見星通道數據進行位同步,碼剝離,幀同步,提取出導航電文;最后根據導航電文解算導航數據,計算偽距,根據導航電文中的衛星位置積分推算出可見星的實時位置,最終用最小二乘法解算出用戶坐標。
MATLAB平臺上的軟件接收機可以通過修改參數設置適應不同的射頻前端,靈活性強,升級簡單,算法改動方便,具有很強的適應性和通用性[11]。
將生成的模擬信號輸入軟件接收機進行分析,可以得到圖2~圖4的捕獲結果、定位結果和衛星星座圖。

圖2 軟件接收機捕獲結果
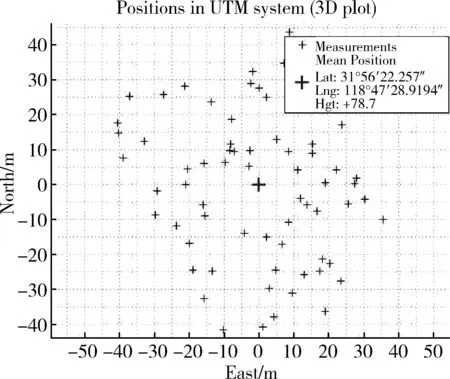
圖3 衛星定位圖
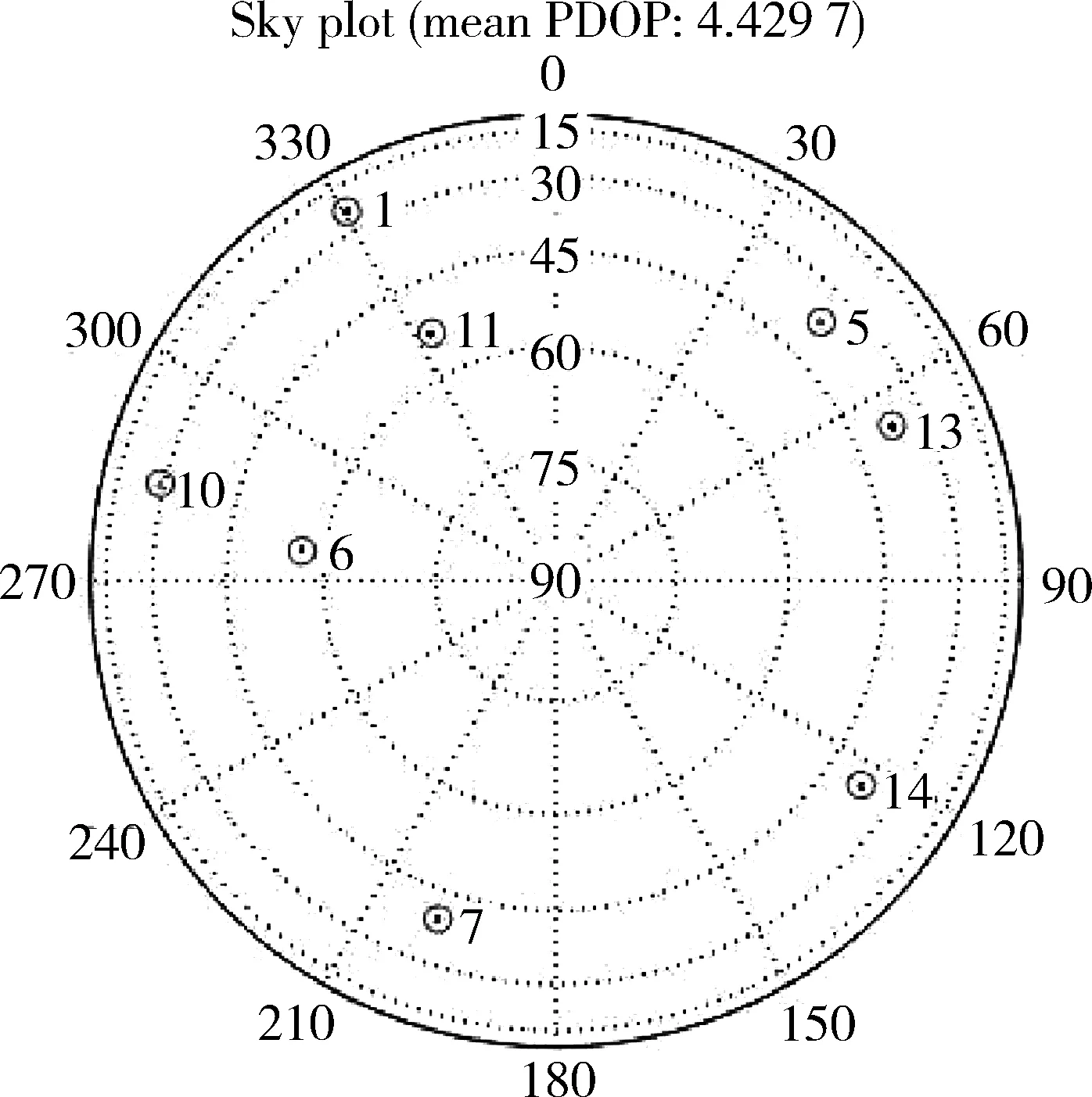
圖4 衛星星座圖
由圖2可以看到捕獲到的衛星號、頻率、多普勒偏移、碼偏移。根據圖1、圖2可以看到模擬信號的可見衛星與軟件接收機捕獲跟蹤到的衛星是一致的,軟件接收機解調校驗出正確格式的導航電文,由導航電文解算出了星歷和歷書參數,進行位置解算,實現定位,且定位坐標與初始設定坐標基本一致。
4 結束語
本文設計的GLONASS衛星導航軟件模擬產生的GLONASS中頻信號可以實現正確捕獲跟蹤、電文解算與用戶定位,并且開發了基于MATLAB平臺的軟件接收機進行了驗證。該設計信號生成方式靈活,成本低,精度較高,可以模擬真實信號,為導航信號接收機提供便捷的測試環境,有一定的應用價值。
[1] 侯博, 謝杰, 范志良,等. 多模衛星信號模擬器設計與實現[J]. 計算機測量與控制, 2012, 20(1): 170-172.
[2] 劉芬, 張曉培. GLONASS中頻信號軟件模擬器設計[J]. 福建電腦, 2012, 28(12): 122-124.
[3] 林靜然, 高鵬, 周渭民,等. 多通道GPS模擬信號源[J]. 數據采集與處理, 2012, 27(6): 677-683.
[4] 工業信息化部.SJ/T11418-2010 GLONASS ICD[S].北京:中國電子技術標準化研究所,2011.
[5] Hu Yan, Li Hong, Lu Mingquan, et al. Design and implementation of a high fidelity GLONASS signal simulator[C]. IEEE 2012 Spring Congress on Engineering and Technology, Xi′an, 2012: 1-4.
[6] 張威,張更新,尹冉冉,等.基于衛星星歷的多普勒頻移研究[J]. 軍事通信技術, 2011, 32(3): 45-49.
[7] 宋媛媛, 曾大治, 曾濤.基于三階DDS的衛星信號多普勒模擬方法[J]. 北京理工大學學報,2010, 30(10): 1213-1216.
[8] Zhang Bo, Liu Guangbin, Jiao Wei, et al. High-order DDFS applied in simulated high-dynamic GNSS signal synthesis[C]. International Conference on Electronic Measurement & Instruments. IEEE, 2009: 4102-4106.
[9] 柯福陽, 王慶, 潘樹國. 自動積分步長的GLONASS衛星軌道龍格庫塔積分法[J]. 東南大學學報(自然科學版), 2010, 40(4): 755-759.
[10] 謝鋼.全球導航衛星系統原理-GPS、格格納斯和伽利略系統[M].北京:電子工業出版社, 2013.
[11] 祖秉法. “北斗二號”民用軟件接收機關鍵技術研究[D]. 哈爾濱:哈爾濱工程大學, 2010.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06