深空探測天文測角測速組合自主導航方法*
2018-04-18 07:24:14張偉
飛控與探測 2018年1期
關鍵詞:系統
張 偉
(1.上海衛星工程研究所·上海·200240;2.上海市深空探測技術重點實驗室·上海·200240)
0 引 言
深空探測具有飛行距離遠、飛行環境未知因素多、飛行程序復雜、器地通信時延與損耗大、存在跟蹤盲區與天體遮擋、自主性要求高等特點,對導航能力提出了更高的要求[1]。為了確保未來深空探測重大工程任務的順利實施,提高深空任務的成功率,降低工程技術風險,深空自主導航是必須且亟待突破的關鍵技術之一[2-3]。
當前深空自主導航技術大多通過天文測角或測距信息來實現導航狀態的實時估計[4-5],受目標天體觀測條件的約束,無法保證長期獲取實時的、連續的導航信息[6-7]。然而,天文光學信息中蘊含的光譜特征及其頻移量包含了探測器的速度信息,若能夠充分利用空間天然資源,如直接獲取光譜測速信息,可實現瞬時速度的高精度估計,進一步提高深空探測自主導航精度[8-9]。
利用天文恒星光譜測速方法瞬時速度精度高、位置精度隨時間發散的特點,將其與測角導航方法相結合形成組合導航系統,可實現深空探測連續自主、實時高精度的導航。本文在組合導航系統建模的基礎上,對系統的可觀測性進行分析,并搭建了組合導航半物理仿真試驗系統,結合火星探測工程任務背景開展仿真驗證。
1 組合導航系統建模與算法
深空探測天文測角測速組合自主導航系統由三部分組成:
1)測角導航子系統:包括軌道動力學模型、測角導航敏感器和測角子濾波器;
2)測速導航子系統:包括軌道動力學模型、測速導航敏感器和測速子濾波器;
3)組合導航子系統:實現對2個子系統輸出估計值的信息融合。
由于測角導航子系統的速度信息是通過位置差分獲得的,其瞬時速度估計精度不高;測速導航子系統的位置信息通過速度積分獲得,存在隨時間發散的問題。通過對測角、測速信息的有效融合,可以避免測角、測速子系統的不足,實現對定位、定速信息的整體優化估計。
1.1 狀態模型
深空探測器自主導航系統的狀態模型一般依據軌道動力學建立。在火星探測巡航段,主要考慮太陽、地球、火星等天體攝動,太陽光壓攝動,探測器推力等因素[10]。設探測器在J2000日心黃道慣性坐標系下的位置矢量為r=[x,y,z]T,速度矢量為v=[v x,v y,v z]T,狀態變量X(t)=[x,y,z,v x,v y,v z]T,則軌道動力學方程可以表示為:其中,第一項表示以太陽為引力中心的引力加速度項,uS為太陽引力常數;第二項表示考慮的行星第三體引力攝動加速度項,ri是第i個行星在日心黃道慣性系下的位置矢量,μi是對應的行星引力常數,N=1,2,3,…表示行星的編號,r si為行星相對探測器的位置矢量;第三項是太陽光壓攝動加速度項,η是陰影因子,PSR是距離太陽1AU處的光壓,CR為探測器的表面反射系數,AR是垂直于太陽光線方向的探測器橫截面積,m是航天器的質量;最后一項表示探測器推力加速度項。
綜上,探測器軌道動力學方程為

其中,W(t)是模型噪聲,一般作高斯白噪聲處理。
1.2 量測模型
1.2.1 測角量測方程
如圖1所示,在巡航段末期,探測器將逐步靠近火星,火星的視星等逐步減小。探測器利用星上導航敏感器和太陽敏感器獲得火星、太陽的光學圖像,進而提取參考天體相對于探測器的視線方向矢量,然后結合導航濾波算法實現自主導航[11]。

圖1 測角導航原理示意圖
在日心慣性坐標系中,由幾何關系有:

其中,l ps為太陽相對探測器的視線方向矢量,l pm為火星相對探測器的視線方向矢量,可通過導航敏感器測量獲得;l sm為由太陽指向火星的方向矢量,可通過星歷解算獲得。
探測器在慣性系中的位置為

即

其中,l ps和l pm可通過導航敏感器及太陽敏感器獲得,其觀測量模型有:

其中,V ps、V pm為視線矢量觀測噪聲。
取r的觀測值為Z,則觀測方程有

對式 (7)在l ps和l pm處泰勒展開得

忽略觀測量中的高階小量,則

其中,觀測誤差

其中,V ps、V pm是量測噪聲,一般作高斯白噪聲處理。
1.2.2 測速量測方程
深空探測器在接收恒星光譜時,若深空探測器相對于恒星的位置是變化的,那么所接收的光譜和相對靜止時相比就會有波長的漂移,波長的漂移表現在光譜上就是譜線的移動[12-13]。根據多普勒原理,波長的漂移量與探測器相對恒星靜止時的波長之比等于視向速度與光速之比,即

其中,vr為視向速度,c為光速,Δλ為波長漂移量。
采用非對稱空間外差干涉測速方法,儀器感知恒星輻射信號并獲得干涉信號,其相位移動量δφ與相對視向速度的關系為[14]

其中,Δd為設計光程差,視為不變常量;σ為線心波數,是光波長λ的倒數。通過采集并反演干涉圖像,可計算獲得速度值。
從天文光譜測速導航儀解算得到相對運動速度的大小。假設探測器、恒星在日心黃道慣性坐標系下的運動速度為v、vStar,探測器相對恒星視線方向為lStar,那么探測器相對單顆恒星的運動速度大小為

其中,vStar、lStar是恒星在參考慣性坐標系下的速度和視線方向矢量,可由星表獲得。
如圖2所示,建立以探測器相對太陽及其他2顆恒星的視向速度為量測的觀測方案,則
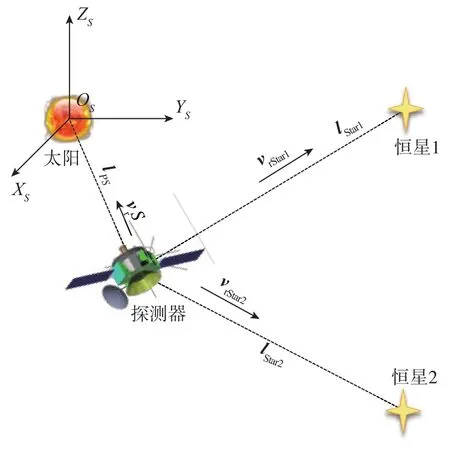
圖2 測速導航原理示意圖
分析式 (14)可知,為了能夠完全反演得到探測器在慣性參考坐標系下的速度矢量,v的系數矩陣[lStar1lStar2lStar3]必須可逆,即探測器相對3顆恒星的視線方向必須非共面。
以探測器相對太陽及2顆恒星的視向速度大小為量測量,則量測方程為
其中,V是量測噪聲,一般作高斯白噪聲處理。
1.3 組合自主導航算法
與EKF相比,對于非線性很強的系統,UKF算法不需要計算雅可比矩陣,即不需對狀態方程和量測方程線性化,因此模型高階項的截斷誤差較小,可以獲得更高的精度[15-16]。深空探測測角測速組合自主導航系統是典型的非線性系統,適合采用UKF算法。
2 組合導航可觀測性分析
導航系統的可觀測性反映了系統通過有限時間內的觀測量確定系統狀態的能力[17]。可觀測矩陣是系統可觀測分析的重要依據,針對強非線性系統,可以利用李導數求解系統的可觀測矩陣。

忽略誤差影響,導航系統方程可表示為:其中,狀態矢量X∈X n?R n;狀態方程f和觀測方程h為C n內光滑的解析函數。
由微分幾何理論,h沿f的各階李導數為[18]:

其中:

綜上可得非線性系統的觀測空間H。在觀測空間H內,是包含狀態變量和觀測變量的最小線性空間。對X0∈X n,如果dH n滿足可觀測性秩條件,則稱系統∑在X0點是局部弱可觀測的。
由dH n定義的非線性系統的可觀測矩陣Q(X)可以表示為[19-20]
可觀測矩陣的條件數可以表征導航系統的整體可觀測度[21-22],即

其中,σQ是Q的奇異值。分析可知,γ∈[0,1];當γ=0時,rank(Q)<n,系統是不可觀測的。該方法不依賴于觀測數據,只與導航系統的模型有關,可以作為判斷量測方案優劣的指標。
為了更好地對比分析系統的可觀測性,本文定義系統可觀測階數:使系統可觀測矩陣Q(k)滿足可觀測條件的最小觀測次數。系統可觀測階數反映了系統狀態與系統觀測量之間的積分關系,可表征導航估計收斂速度和抗干擾能力。
針對測角導航及測角測速組合導航,分析導航系統的可觀測性能,結果如表1所示。可以看出,視線矢量量測方案是2階可觀測,其可觀測度比組合量測方案低1個數量級。

表1 可觀測性分析結果
3 組合導航半物理仿真
3.1 仿真系統設計
根據測角測速組合導航總體設計,半物理仿真系統功能包括:1)模擬深空探測器不同飛行階段的軌道與姿態動力學環境;2)為測角導航敏感器提供導航圖像模擬信號;3)為測速導航敏感器提供導航光譜模擬信號;4)實現測角測速組合自主導航濾波估計,輸出導航結果;5)對飛行全過程導航數據進行采集,實現性能評估。
實驗系統由動力學宿主機、動力學目標機、火星模擬器、恒星光譜模擬器、測角導航敏感器、測速導航敏感器、測角導航計算機、測速導航計算機、組合導航計算機、數據存儲與顯示終端、性能評估計算機等組成,各部分連接框圖如圖3所示。
圖4、圖5所示為組合導航半物理仿真系統測試現場圖及部分單機實物圖。
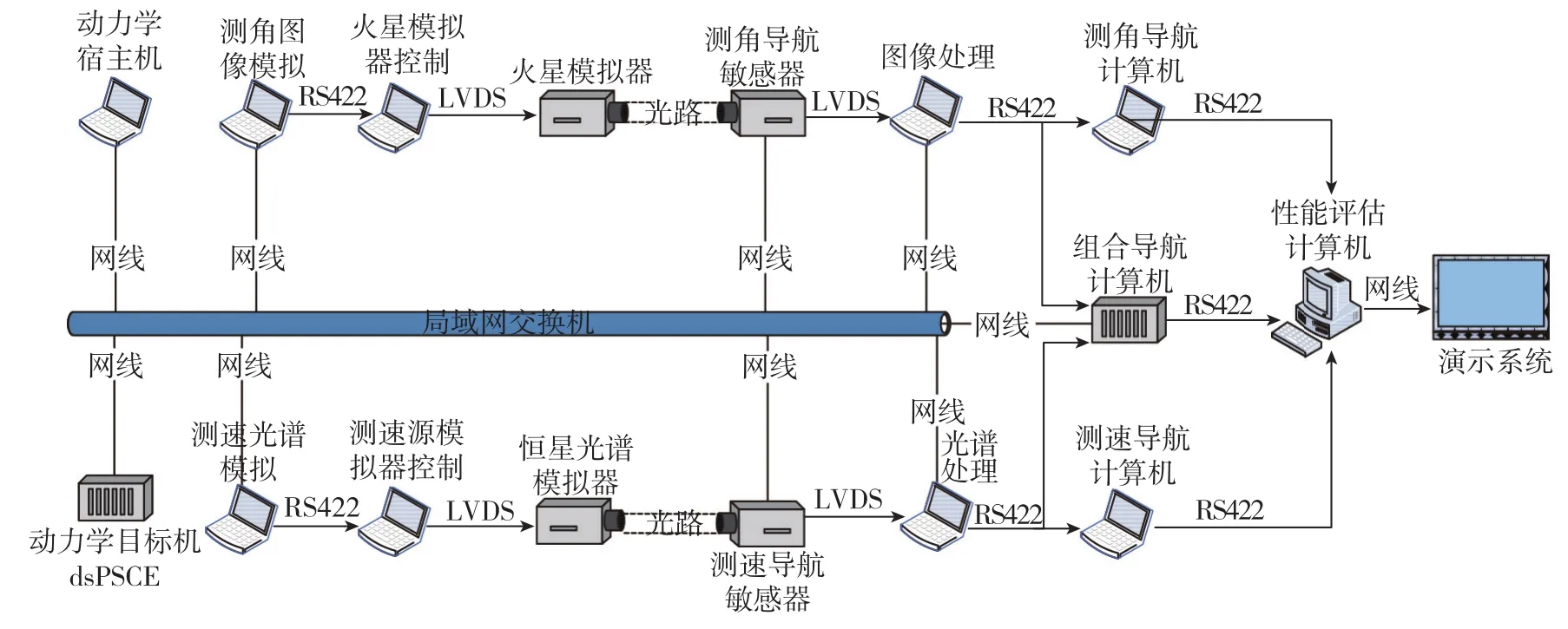
圖3 組合導航半物理仿真系統連接圖

圖4 組合導航半物理仿真系統現場

圖5 組合導航半物理仿真系統部分硬件實物圖
3.2 仿真條件
探測器初始狀態為:r=[60480784 216398917 6349369]km;v=[-20.2006 10.0324-0.4970]km/s。探測器初始位置偏差1000km,速度偏差100m/s。半物理仿真開始時間:2021-01-15 05:46:07 UTC,結束時間:2021-01-25 18:40:00 UTC。行星星歷采用DE421;恒星數據由依巴谷星表提供,其中2顆恒星編號為45348和172167。
3.3 仿真結果分析
測角導航結果如圖6所示,探測器的位置估計精度為455.7512km(3σ),速度估計精度為1.0592m/s(3σ)。在保證測角精度為2arc sec情況下,位置估計精度較高,速度估計精度較好。

圖6 測角導航位置和速度估計結果
圖7所示為加入3顆恒星的測速量測后的導航仿真結果,其中位置估計精度為291.1255km(3σ),速度估計精度為0.2156m/s(3σ),較測角導航精度有了明顯的提升。
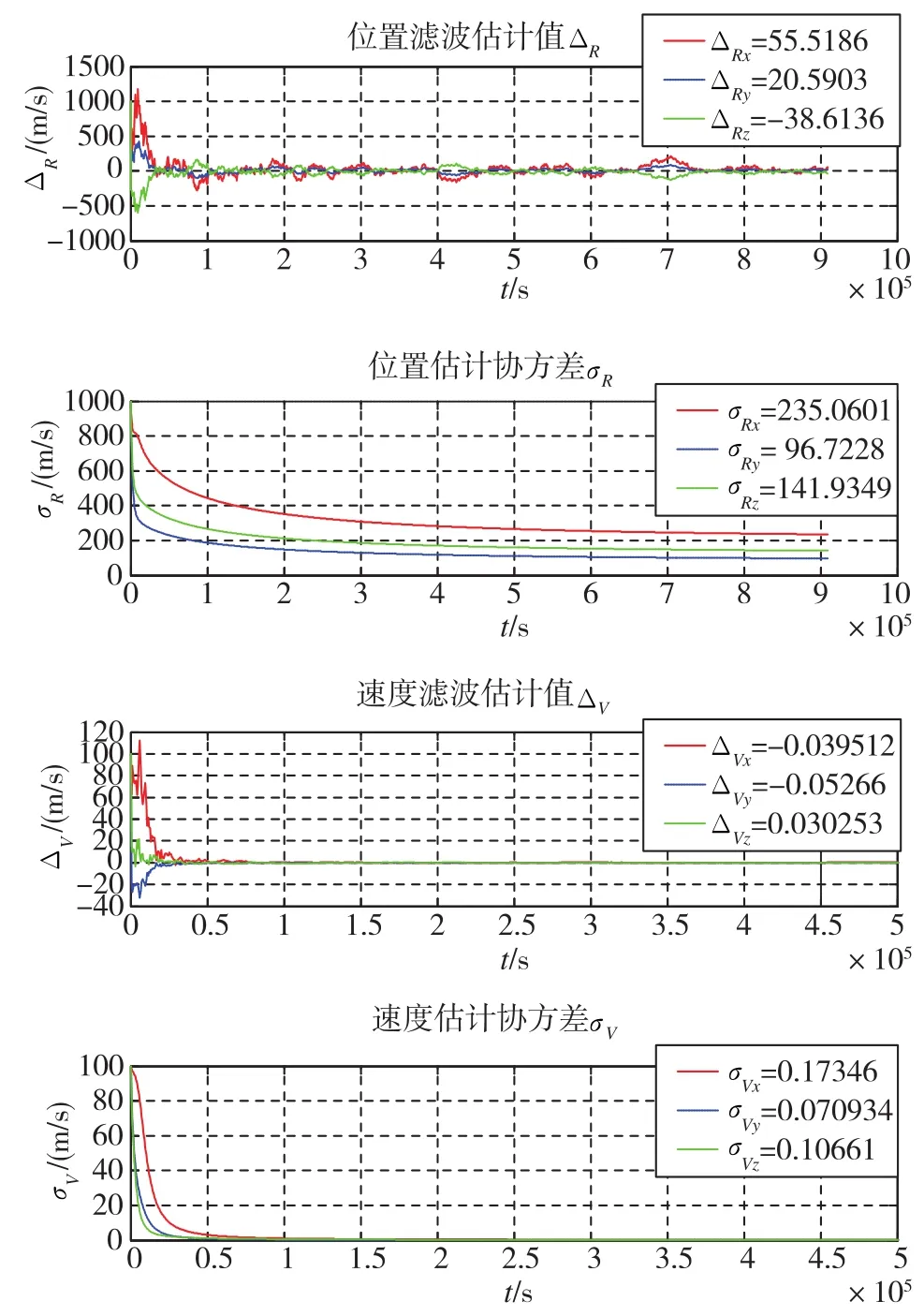
圖7 測角測速組合導航位置和速度估計結果
對比分析上述2組仿真結果可知,由于天文光譜測速量測信息的加入,組合導航位置和速度的估計結果精度更高,收斂速度更快,有效地減弱了量測誤差及星歷誤差等因素的影響。
4 結 論
本文針對現有深空探測自主導航方法的不足,基于天文恒星光譜測速方法的特點,將其與測角導航相結合形成組合導航系統,并給出了組合導航系統的模型及導航濾波算法。導航系統可觀測度分析結果表明,組合導航系統較現有測角導航方法更優,導航估計收斂速度和抗干擾能力更強。基于火星探測工程任務,搭建組合導航半物理仿真試驗系統。仿真結果表明,加入天文光譜測量信息后,有效抑制了量測誤差的影響,進一步提高了導航估計精度,增強了導航系統可靠性,為實現深空探測高精度自主導航提供了新的技術途徑。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32