改進(jìn)差分進(jìn)化算法在物流配送中的多目標(biāo)優(yōu)化研究
2018-04-17 08:43:29張新
自動化儀表 2018年4期
張 新
(紹興職業(yè)技術(shù)學(xué)院信息工程學(xué)院,浙江 紹興 312000)
0 引言
物流配送是物流中的重要環(huán)節(jié),它解決了物資到消費者的最后一公里問題,關(guān)系到消費者對企業(yè)的滿意度和降低物流管理成本兩方面。物流配送能力將直接影響物流企業(yè)的市場竟?fàn)幜Α榱藵M足用戶的需要、降低物流配送成本,如何科學(xué)地規(guī)劃和部署配送,已成為物流企業(yè)管理者必須考慮的問題[1]。
車輛路徑問題(vehicle routing problem,VRP)最早在1959年由Dantzig提出。它是指配送中心在了解客戶個性化要求的前提下(如客戶物品對應(yīng)單一車輛),安排配送物品的車輛從配送中心出發(fā),并使車輛完成所有配送服務(wù)后返回配送中心。為了解決車輛路徑規(guī)劃問題,1992年,J.Lawrence等人首先研究了進(jìn)化算法,使帶有時間窗口車輛路徑問題(vehicle routing problems with time windows,VRPTW)問題得到了較好的解決。2006年,為了解決多目標(biāo)VRP問題,Tan等人采用了混合多目標(biāo)進(jìn)化算法,較好地解決了帶有時間窗口要求的VRP問題。
本文采用改進(jìn)的差分進(jìn)化算法,對物流配送中的車輛運輸路徑規(guī)劃優(yōu)化,提高了物流配送的經(jīng)濟效益,實現(xiàn)了物流管理的精準(zhǔn)化和科學(xué)化[2-3]。
1 多目標(biāo)物流配送及其模型
1.1 多目標(biāo)物流配送問題
物流配送是物流管理中的重要環(huán)節(jié),優(yōu)化配送要素十分關(guān)鍵。物流配送的最大目標(biāo)是讓用戶滿意,同時要合理規(guī)劃配送計劃,使車輛運輸成本最小化。配送過程指物資由車輛運輸,從配送中心出發(fā)按時間節(jié)點要求及時送到消費者手中;然后車輛返回配送中心。這個過程涉及兩個優(yōu)化目標(biāo):車輛與路徑。物流配送的車輛路徑規(guī)劃在配送過程中要滿足用戶物資送到時間等個性化的約束,是帶有時間窗要求的多目標(biāo)VRP問題。假設(shè)車輛出發(fā)點與結(jié)束點同是配送中心、所有配送車輛的最大載重質(zhì)量和速度是定值、顧客的貨物只能由一輛車配送并且車輛不可重復(fù)到達(dá)顧客點、顧客對配送時間有明確的要求,則路徑和車輛優(yōu)化目標(biāo)是達(dá)到配送成本最小化[4-5]。
1.2 問題模型研究
物流配送路徑優(yōu)化可以采用無向連通圖進(jìn)行描述。假設(shè)圖G=(V,E)表示無向連通圖。其中,V為無向連通圖中的點,代表一個顧客點或配送中心,V={vi|i=0,1,...,n};E為兩點之間的邊,它代表顧客(包括配送中心)之間的距離,E={ei,j|i,j=0,1,...,n且i≠j},i、j為顧客號,n為顧客數(shù)量。本研究是帶有時間窗口的VRP問題。它涉及幾個約束條件:車輛載重約束、配送時間節(jié)點約束、顧客被訪問次數(shù)約束等[6]。
假設(shè)配送中心需要為n個不同地點的顧客配送物資,用S表示顧客;配送中心有足夠的車輛數(shù)m來滿足配送需求,用K表示配送車輛,那么V={S0,S1,…,Sn},K={1,2,…,m}。差分進(jìn)化算法一般采用實數(shù)方式編碼,顧客點編號為1,2,…,n,并且規(guī)定配送中心為編號0[7]。T為配送所需總成本,由配送距離dij和單位車輛路程配送成本Pk計算所得。dij表示顧客之間的距離;每位顧客的貨物量為gi,配送車輛的最大載重質(zhì)量為Q,配送車輛是否到達(dá)顧客i處用yik表示。
帶有時間窗口的物流配送多目標(biāo)函數(shù)主要由兩部分組成:配送成本最低和配送所用車輛最少。
式(1)和式(2)分別表示配送總費用最低和配送用車最少。
(1)
式中:T為配送總成本;dij為配送距離;Pk為車輛單位配送成本;xijk為顧客之間的車輛直達(dá)性。
(2)
式中:K為配送車輛數(shù);x0jk為車輛從配送中心到顧客的直達(dá)性。
模型的主要約束條件如下。
式(3)表示顧客i和顧客j之間的車輛k可達(dá)性,即車輛k是否配送到顧客i處。
(3)
式中:xijk為顧客之間的車輛直達(dá)性;yjk為車輛可達(dá)性。
式(4)表示車輛可到達(dá)顧客點,且只到達(dá)一次。
(4)
式中:xijk為顧客之間的車輛直達(dá)性。
式(5)表示配送車輛載重受限,不能超重運輸。
(5)
式中:gi為顧客的貨物量;yik為車輛是否到達(dá)顧客點;Q為配送車輛的最大載重。
式(6)~式(8)表示車輛在不重復(fù)到達(dá)顧客點的情況下返回配送中心。
(6)
(7)
(8)
式(9)、式(10)對時間窗口進(jìn)行約束控制。
sik+tij-K(1-xijk) ≤sjk
(9)
ai≤sik≤bi
(10)
式中:sik為車載k到達(dá)某一顧客處的時間要求;i=1,2,…,n;k=1,2,…,m。
2 差分進(jìn)化算法
差分進(jìn)化(differentialevolution,DE)算法是一種啟發(fā)式優(yōu)化算法。它最早在1995年,由Storn和Price首次共同提出,主要用于求解實數(shù)優(yōu)化問題。該算法具有結(jié)構(gòu)簡單、容易實現(xiàn)、收斂快速和魯棒性強的特點,目前在電磁學(xué)、模式識別、數(shù)據(jù)挖掘、人工神經(jīng)網(wǎng)絡(luò)等方面取得了較好的應(yīng)用成效。
2.1 基本算法概述
DE算法的主要算法過程與其他進(jìn)化算法大致相同,主要操作有變異、交叉和選擇。算法起始于初始種群。初始種群隨機產(chǎn)生。首先進(jìn)行變異操作:從種群中隨機選取兩個不同個體進(jìn)行差向量操作;隨機選取不同的個體作為第三個個體,把差向量加權(quán)后按照一定的規(guī)則與第三個個體求和,其結(jié)果就是變異個體。然后進(jìn)行交叉操作:按規(guī)則選定目標(biāo)個體,把變異得到的變異個體與目標(biāo)個體進(jìn)行參數(shù)混合,產(chǎn)生試驗個體。最后,進(jìn)行選擇操作,把試驗個體與目標(biāo)個體進(jìn)行比較。如果試驗個體的適應(yīng)度值更優(yōu),則試驗個體將取代目標(biāo)個體;否則,保留目標(biāo)個體。
DE算法的主要步驟為:①基本參數(shù)包括NP、F、CR;②隨機產(chǎn)生初始化種群;③計算種群適應(yīng)度值;④終止條件不滿足時,進(jìn)行循環(huán),依次執(zhí)行變異、交叉、選擇運算,直到滿足終止條件。
2.2 改進(jìn)的差分進(jìn)化算法
為了解決帶有時間窗口的多目標(biāo)物流配送優(yōu)化問題,本文對基本差分算法進(jìn)行了適當(dāng)?shù)母倪M(jìn),以下通過具體案例加以分析說明。假設(shè)配送顧客數(shù)量為8個,配送車輛的最大載重質(zhì)量和行車速度統(tǒng)一為2 000 kg和60 km/h,顧客對配送時間有要求。
①編碼與初始化種群。
首先,進(jìn)行編碼處理。采用自然數(shù)1~8分別表示8位顧客,并把8位顧客數(shù)字通過隨機排位組合,以形成的8位數(shù)向量作為初始種群個體。這個8位向量代表車輛到達(dá)顧客處的順序,其中的分段代表配送車輛數(shù)。如果隨機產(chǎn)生的個體向量Xi(t)為425|681|73,則表明配送車輛為3,3輛車的配送順序分別為:4-2-5,6-8-1,7-3。
②變異操作的改進(jìn)。
變異操作的改進(jìn)基本思想為:首先,選定一個隨機向量Xr1(t)作為變異目標(biāo);然后,對Xr1(t)的各分矢量作乘2處理,得到新的向量Xr2(t);最后,隨機另外選取一個向量Xr3(t),將Xr2(t)-Xr3(t),得到Vi(t+1)。分析向量Vi(t+1)各分量值:如大于限定的最大值則用其減最大值;如小于限定的最小值則用其加最大值,從中刪除分向量值為0 的分向量;如出現(xiàn)重復(fù)分向量就留下排在前面的分向量。按序補上向量Xr1(t)中沒有出現(xiàn)的分向量值,即可得到新的變異向量Vi(t+1)。案例說明如下。
設(shè)定:
Xr1(t)=4 2 5 6 8 1 7 3;
Xr3(t)=5 4 2 7 8 3 1 6;
Xr2(t)=2×Xr1(t)=8 4 10 12 16 2 14 6;
Vi(t+1)=Xr2(t)-Xr3(t)=3 0 8 5 8 -1 13 0。
分析Vi(t+1),得中間結(jié)果: 3 8 5 7。
修正后變異向量Vi(t+1)=3 8 5 7 4 2 6 1。
③交叉操作。

(11)
式(1)中:rand(0,1)取0~1之間的隨機數(shù);CR為確定交叉概率,取0~1之間的實數(shù);jrand的取值為1~n(n=8)之間的自然數(shù)。這就保證了Ui(t+1)向量至少有一個分量來自目標(biāo)向量。
④選擇操作。

(12)
通過執(zhí)行步驟②~步驟④的循環(huán)操作,可得最大進(jìn)化代數(shù)。
⑤選擇Pareto最優(yōu)解。
建立初始為空的非支配集Y,將產(chǎn)生的非支配解存放在Y中,并將產(chǎn)生的可行解Xi(t+1)與Y中的向量作比較。如存在支配關(guān)系,就刪除該支配解,將非支配解存入Y中,直到滿足結(jié)束條件。最終,最優(yōu)解都在Y中[8-9]。
3 實例仿真與分析
3.1 實例條件
從一個配送中心出發(fā),為了滿足8位顧客的配送要求,用1~8分別對顧客進(jìn)行編號。用0表示配送中心,采用同一型號車輛來配送物品。車輛最大載重質(zhì)量為2 000 kg,平均行駛速度60 km/h。顧客配送時間要求及所需物品質(zhì)量如表1所示。車輛從配送中心的出發(fā)時間為上午7∶00;顧客(含配送中心)之間的距離如表2所示。
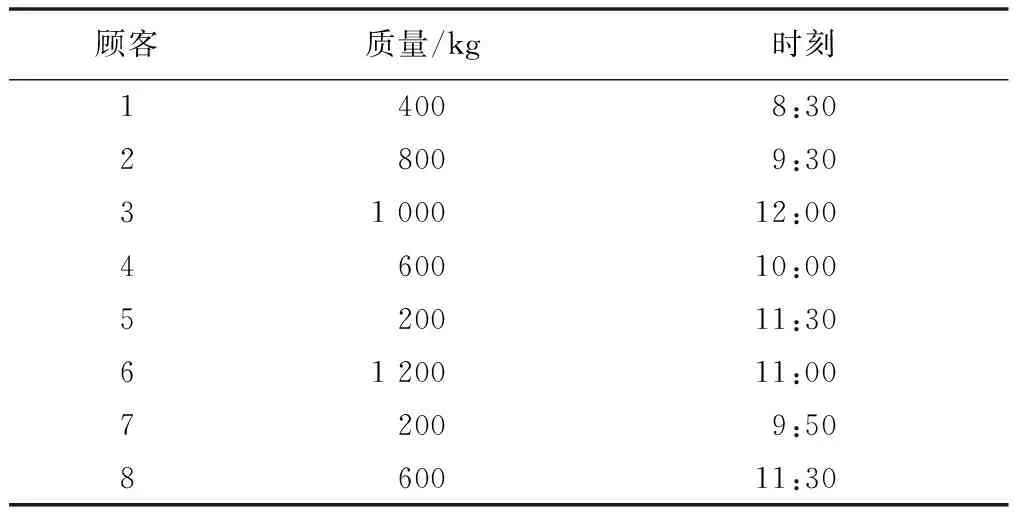
表1 顧客配送時間要求及所需物品質(zhì)量Tab.1 Delivery time requested by customers and the weight of the goods
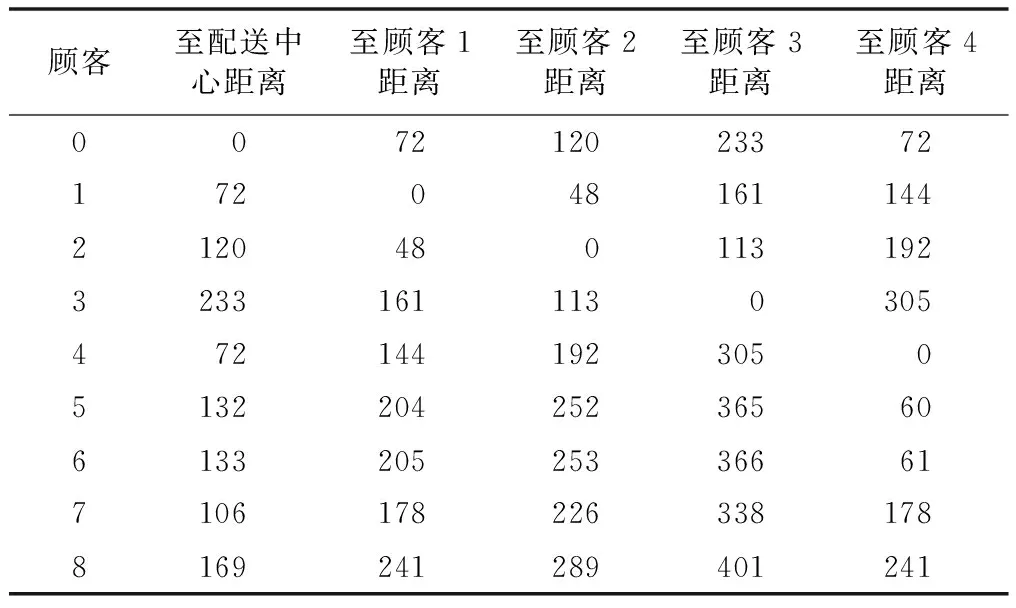
表2 顧客(含配送中心)之間的距離Tab.2 Distance between customers (including the distribution center) km
3.2 仿真過程分析
整個仿真過程采用了3組起始種群數(shù)NP和迭代次數(shù)N∶NP=6,N=10;NP=10,N=10;NP=20,N=100。
表3為NP=6時隨機產(chǎn)生的初始化種群,車輛數(shù)最多為6輛、最少為5輛,總運輸路程最長為1 301 km,最短為932 km,平均為1 180 km左右。這些初始化種群的可行解離最優(yōu)化較遠(yuǎn)。
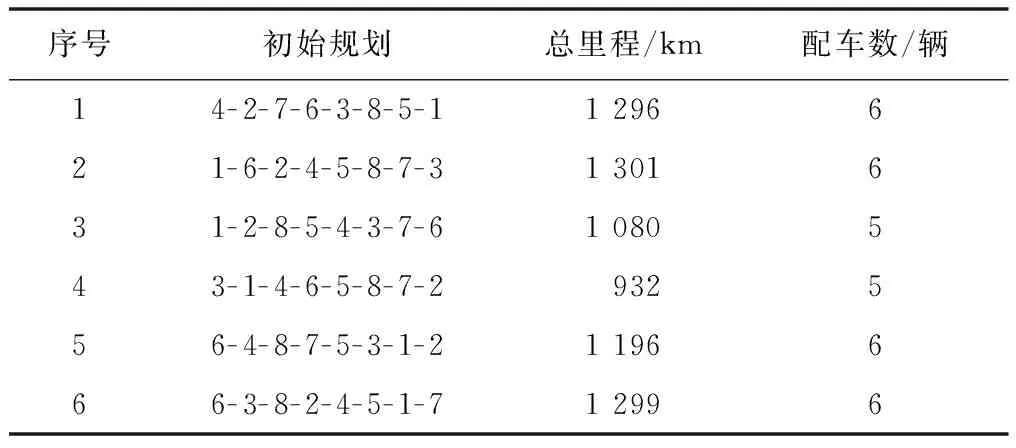
表3 初始化種群(NP=6Tab.3 Initialization population (NP=6)
表4為NP=6時,經(jīng)過十次迭代運算后的可行解集。從表4中可明顯發(fā)現(xiàn)車輛運輸總路程和配送車輛數(shù)都有了減少,最短總路程數(shù)為862 km,車輛數(shù)最小為3輛。
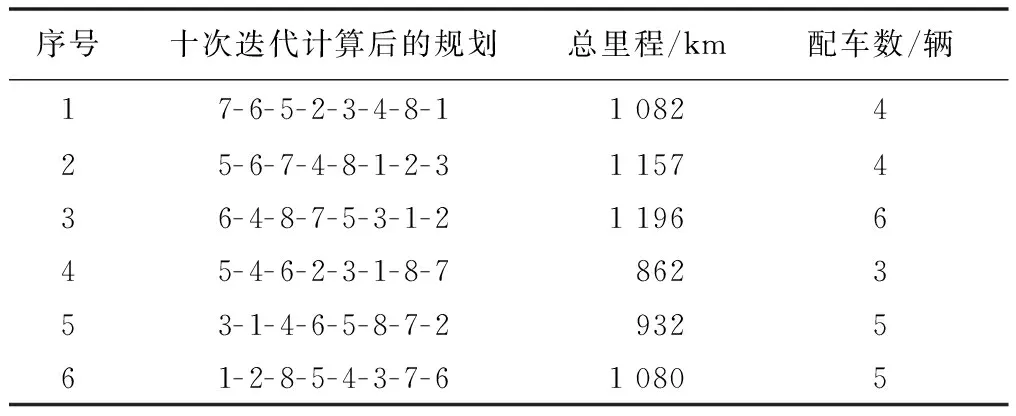
表4 十次迭代運算后的種群(NP=6)Tab.4 The population after ten generation operation (NP=6)
表5為當(dāng)NP=10時,經(jīng)過十次迭代運算后的最優(yōu)可行解。表5數(shù)據(jù)表明,最優(yōu)配車數(shù)為3輛,最短總運輸路程為862 km,產(chǎn)生的3條規(guī)劃路徑為:5-4-6,2-3,1-8-7。
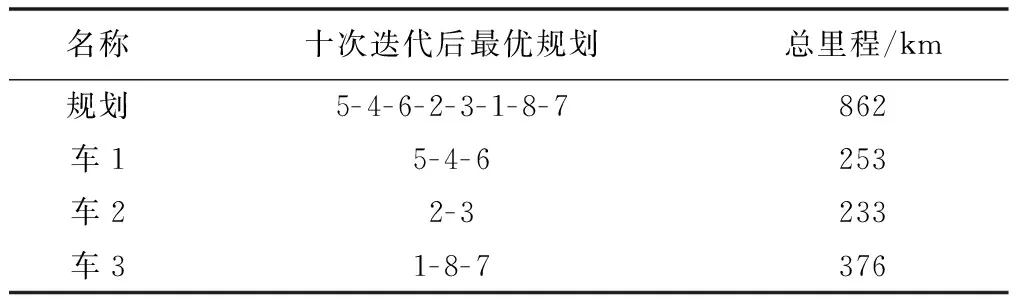
表5 十次迭代運算后的最優(yōu)化解(NP=10)Tab.5 The optimal solution after ten generation operation (NP=10)
表6為當(dāng)NP=20時,經(jīng)過百次迭代運算后的最優(yōu)可行解。表6數(shù)據(jù)表明,最優(yōu)配車數(shù)為3輛,最短總運輸路程為799 km,產(chǎn)生的3條規(guī)劃路徑為:5-4-6,2-3,1-7-8。

表6 百次迭代運算后的最優(yōu)化解(NP=20)Tab.6 The optimal solution after one hundred generation operation (NP=20)
4 結(jié)束語
VRP問題一直是大家關(guān)心的重要課題。研究者從不同的角度對其展開了研究與應(yīng)用,取得了不少成功的案例。帶有時間窗口的VRP問題相對較復(fù)雜,受到更多的約束條件限制[10]。本文采用了適當(dāng)改進(jìn)的差分進(jìn)化算法,對物流配送中的多目標(biāo)優(yōu)化進(jìn)行了應(yīng)用研究,MATLAB仿真結(jié)果表明,算法可行、有效,收斂快且穩(wěn)定,為物流配送規(guī)劃提供了一種優(yōu)化方案。(
參考文獻(xiàn):
[1] 鄒霞玲.基于物聯(lián)網(wǎng)的航空物流管理系統(tǒng)研究[J].自動化儀表,2016,37(6):66-70.
[2] 楊振宇.差分進(jìn)化算法參數(shù)控制與適應(yīng)策略綜述[J].智能系統(tǒng)學(xué)報,2011(10):415-423.
[3] 蔡浩原.基于人工蜂群算法的鮮活農(nóng)產(chǎn)品冷鏈物流配送路徑優(yōu)化[J].江蘇農(nóng)業(yè)科學(xué),2017(15):318-321.
[4] 楊啟文.差分進(jìn)化算法綜述[J].模式識別與人工智能,2008(4):506-513.
[5] 裴振奎.差分進(jìn)化算法在多目標(biāo)路徑規(guī)劃中的應(yīng)用[J].遼寧工程技術(shù)大學(xué)學(xué)報,2010(5):899-902.
[6] 李偉.基于時間最短路徑的停車場車位引導(dǎo)算法[J].自動化儀表,2015,36(8):23-25.
[7] 徐杰.基于混合粒子群算法的多目標(biāo)車輛路徑研究[J].計算機集成制造系統(tǒng),2007(3):573-580.
[8] 李昌兵.物聯(lián)網(wǎng)環(huán)境下生鮮農(nóng)產(chǎn)品物流配送路徑優(yōu)化研究[J].商業(yè)研究,2017(4):1-9.
[9] 李榮雨.改進(jìn)的差分進(jìn)化算法在電力經(jīng)濟調(diào)度中的應(yīng)用[J].自動化儀表,2016,37(11):43-47.
[10]虎濤濤.一種混沌變參數(shù)粒子群優(yōu)化算法[J].自動化儀表,2017,38(3):37-40.