主動質量阻尼器控制方式在電梯振動控制中的應用研究
2018-04-16 08:35:17俞英杰
裝備機械 2018年1期
□ 俞英杰
上海三菱電梯有限公司 上海 200245
1 研究背景
隨著電梯運行速度越來越快,空氣湍流、導軌不平產生的外部激勵越來越大,直接導致轎廂內振動加大,影響乘客乘坐的舒適感[1]。傳統的電梯減振方式主要為在導靴側或轎廂、轎架間增加彈簧或橡膠等,屬于被動減振方式[2-3]。對于低速運行的電梯而言,由于激勵幅值小,采用被動控制方式可以取得顯著的減振效果。但是隨著運行速度的加快,外部激勵幅值大幅增加,傳統被動減振控制方式將無法進行有效控制[1]。
因此,針對電梯振動,要采用主動控制方式。主動控制方式與電梯的被動減振系統無關,通過在電梯系統中引入與激勵方向相反的主動控制力,從而達到抑制振動幅值的作用。
電梯振動的主動控制主要采用電磁力控制[5-6]和主動質量阻尼器(AMD)[7]控制兩種方式。AMD控制結構簡單,成本較低,但響應時間較慢。電磁力控制主要以電磁主動導靴的形式進行主動控制,結構復雜,成本高,但是由于具有快速響應的特性,因此,可以更高效、精確地對外部激勵進行抑制。
筆者主要探討AMD控制方式,通過簡化模型、仿真計算,分析AMD控制方式在電梯振動控制中應用的效果及可能存在的問題。
2 AMD控制原理
AMD控制結構主要由三部分構成:伺服電機、可動質量塊、滾珠絲杠。伺服電機帶動滾珠絲杠旋轉,從而推動可動質量塊沿著滾珠絲杠的軸向方向來回運動[8-9]。
為了分析AMD控制原理,忽略電梯豎直向與前后向的振動,將電梯模型簡化為一維方向的受力模型,如圖1所示。圖1中,M為轎廂系統質量,k、c分別為轎廂系統與導靴間的剛度和阻尼,m為AMD控制結構中可動質量塊的質量,X0為導軌處產生的位移激勵,XG為轎廂產生的位移,Xa為AMD系統可動質量塊產生的位移,θa為伺服電機產生的滾珠絲杠轉動角速度,Fa為轎廂對AMD可動質量塊的作用力,Fa’為AMD可動質量塊對轎廂的作用力,即主動控制力,FW為由導靴處傳入的外部激勵力。
當外部輸入一個位移激勵X0,使整個轎廂受到一個向右的力FW,進而產生了位移XG。如果此時安裝在支撐框架上部的AMD動作,使可動質量塊也產生一個位移量Xa,Xa=XG+XF,XF為由伺服電機推動可動質量塊相對于轎廂運動其中產生的位移,可動質量塊受到伺服電機產生的推力同時由于反作用力的關系,轎廂系統受到一個反向的力與外部的激勵力FW方向相反,從而可以起到抑制轎廂系統振動的作用。
對于外部的位移激勵信號X0,通過求解力平衡方程,可以得到相應的主動控制力通過聯立伺服電機的回轉運動方程,可以得到伺服電機電壓U、轎廂加速度響應的關系。因此,可以通過控制伺服電機達到抑制轎廂振動的目的[10-11]。
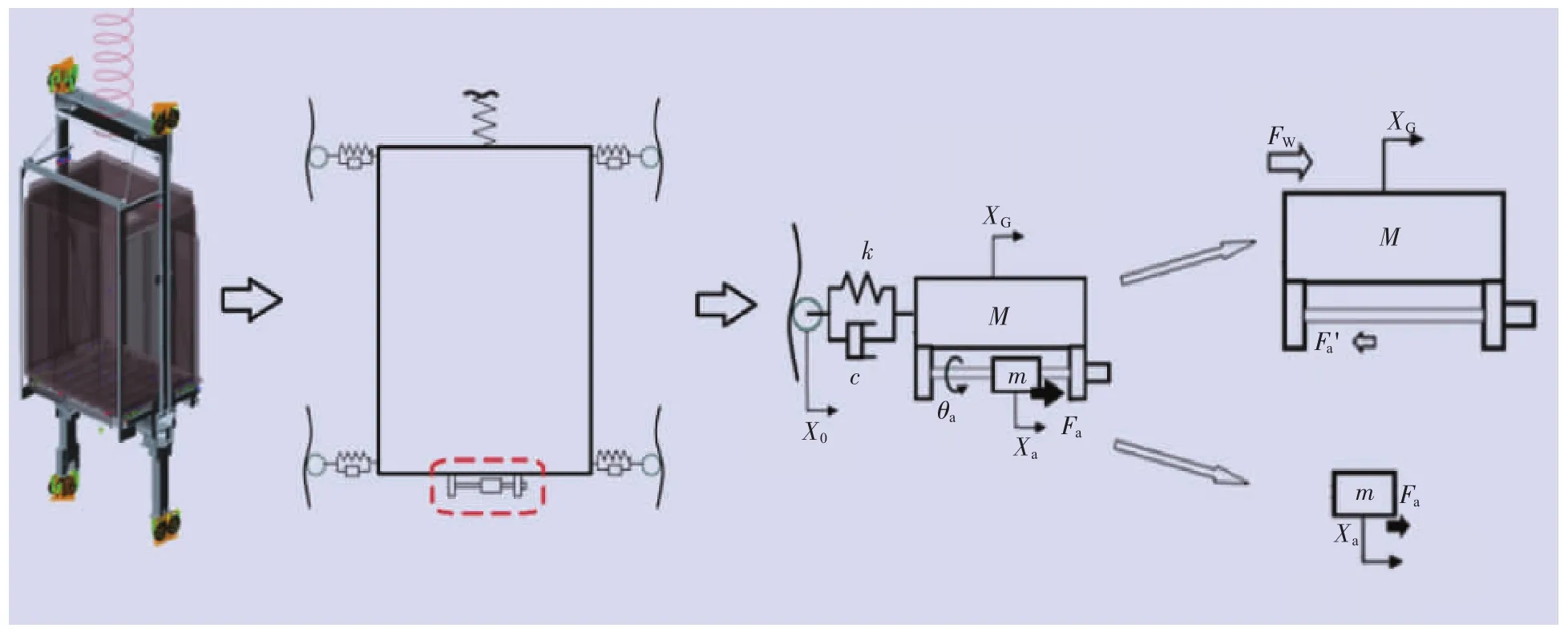
圖1 電梯受力模型
3 仿真計算
3.1 模型簡化
應用MSCADAMS軟件,建立簡單的仿真模型,如圖2所示。將支撐框架和轎廂室的質量相加,簡化為一體,即圖2中大方塊部分。將導靴視為一體,即圖2中小方塊部分。在導靴側采用位移激勵,模擬由于導軌不平產生的橫向激勵。
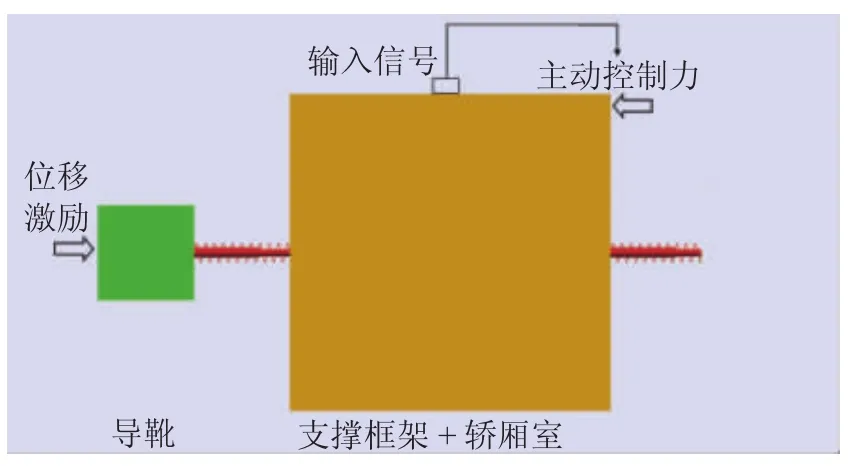
圖2 MS CADAMS簡單仿真模型
3.2 輸入信號相位影響分析
采用單頻正弦信號作為激勵,主動控制力分別采用與輸入信號同相位、反相位,計算結果如圖3~圖6所示。
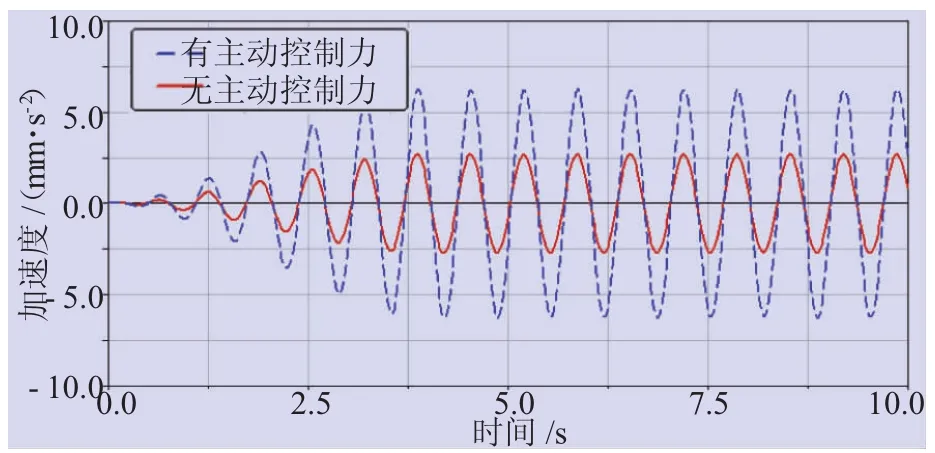
圖3 主動控制力與輸入信號同相位時加速度響應曲線
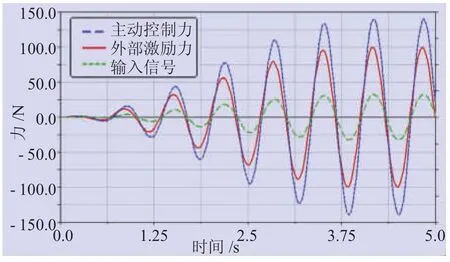
圖4 主動控制力與輸入信號同相位時對比曲線
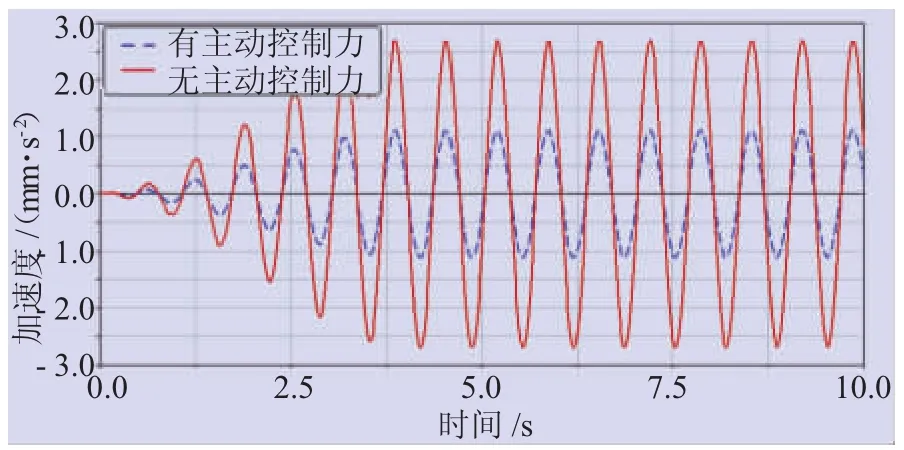
圖5 主動控制力與輸入信號反相位時加速度響應曲線
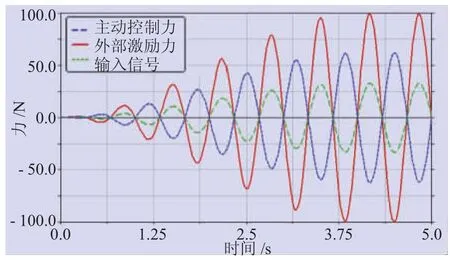
圖6 主動控制力與輸入信號反相位時對比曲線
由圖3~圖6可知,主動控制力與輸入信號同相位時,主動控制力與外部激勵力也為同相位,從而導致振動被進一步放大。主動控制力與輸入信號反相位時,主動控制力與外部激勵力也為反相位,實時抵消外部激勵的影響,轎廂室的振動幅值明顯下降。
由于AMD的可動質量塊由伺服電機所驅動,因此當外部激勵頻率較高時,相位不斷變化,為了抵消外部激勵,所輸出力的相位也要隨之變化。此時,伺服電機的響應速度有可能無法跟上外部激勵的相位變化,反而有可能造成振動幅值的增大。可見,AMD控制結構的響應速度,即伺服電機的響應速度是影響AMD控制效果的重要因素。
3.3 主動控制力大小影響分析
主動控制力大小對轎廂減振效果有很大的影響。如圖7、圖8所示,改變控制因數α,主動控制力與外部激勵力的大小越接近時,系統所受到的合力越小。根據公式可知,合力FW+Fa越小,轎廂系統的加速度也就越小。由此可以發現,AMD控制的本質就是通過主動控制力抵消外部激勵力的影響,從而達到減振的目的。如果主動控制力過大,則可能成為新的激勵源,使振動變大。
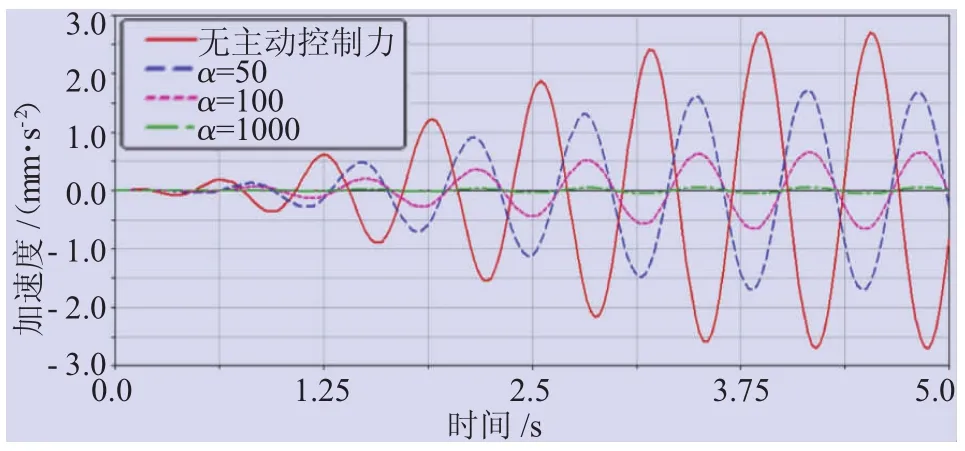
圖7 不同控制因數時加速度響應曲線
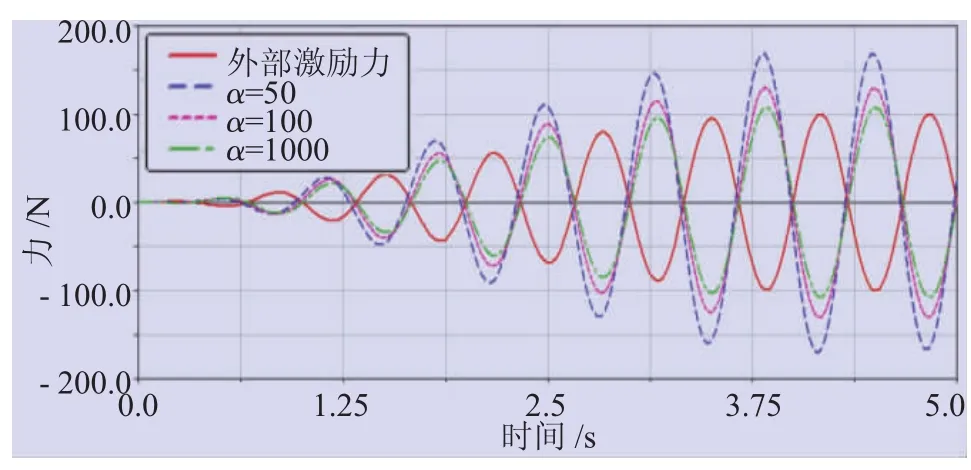
圖8 不同控制因數時外部激勵力與主動控制力對比曲線
3.4 位移隨機激勵仿真計算
采用位移隨機激勵輸入,再次進行仿真,分析在振動幅值、頻率、相位隨機變化時,采用AMD控制轎廂的振動響應情況,如圖9~圖12所示。
當主動控制力和輸入信號為同相位時,主動控制力與外部激勵力為同相位,且不發散,此時情況與正弦信號激勵時不同,加速度響應幅值不僅沒有增大,而且反而有所衰減。
當主動控制力和輸入信號為反相位時,主動控制力與外部激勵力為反相位,主動控制力抵消外部激勵力,使轎廂室的加速度響應幅值有大幅度下降。當外部激勵力很小時,只需要給予一個很小的力,便可以取得很好的減振效果。當外部激勵力很大時,只需要增大AMD可動質量塊的質量和伺服電機的輸出功率,同樣可以取得很好的減振效果。
主動控制的實質是力的抵消,即通過主動控制力抵消外部激勵力。根據圖9~圖12,當最后系統趨于穩定,由于偏載作用而存在一個恒定靜力并導致系統位移不為0時,若要AMD控制結構仍然提供一個反方向的控制力,這顯然是不可實現的。AMD控制本質是由伺服電機推動可動質量塊時產生對支撐框架的反作用力,由于可動質量塊的行程有限,這一反作用力不可能恒久存在,因此采用位移控制,對于偏載情況顯然會出現可動質量塊超出行程的問題。可見,在采用位移控制時,控制因數α不能為一個常數,應該在系統接近穩定時使控制因數α變為0。
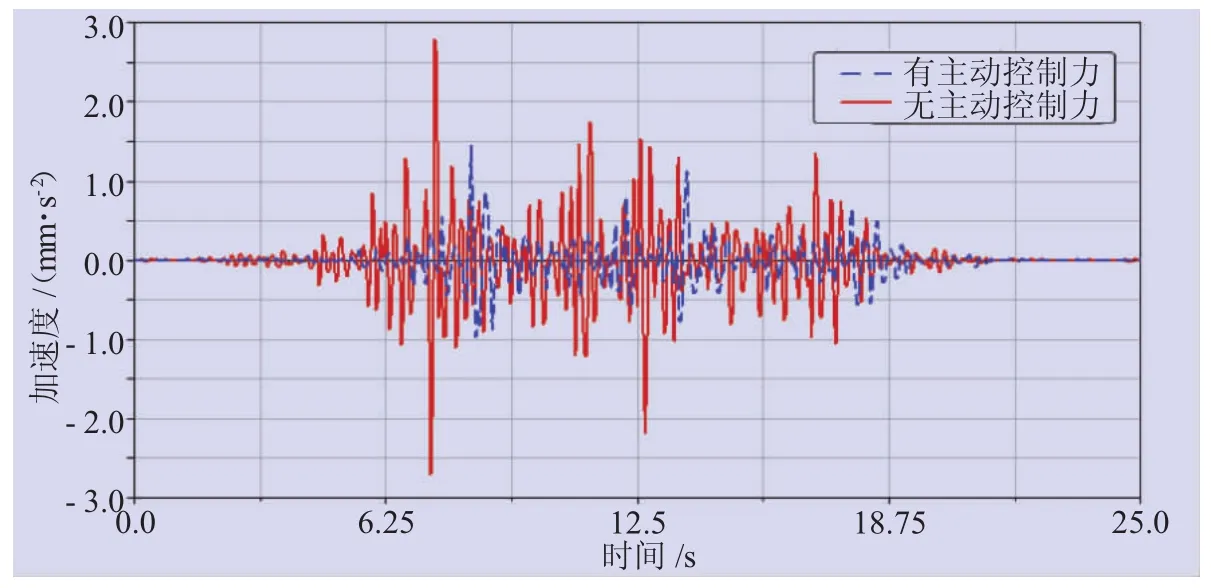
圖9 位移隨機激勵下主動控制力與輸入信號同相位時加速度響應曲線
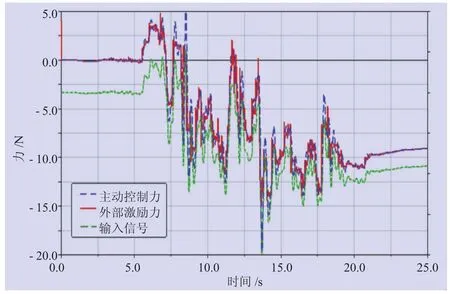
圖10 位移隨機激勵下主動控制力與輸入信號同相位時對比曲線
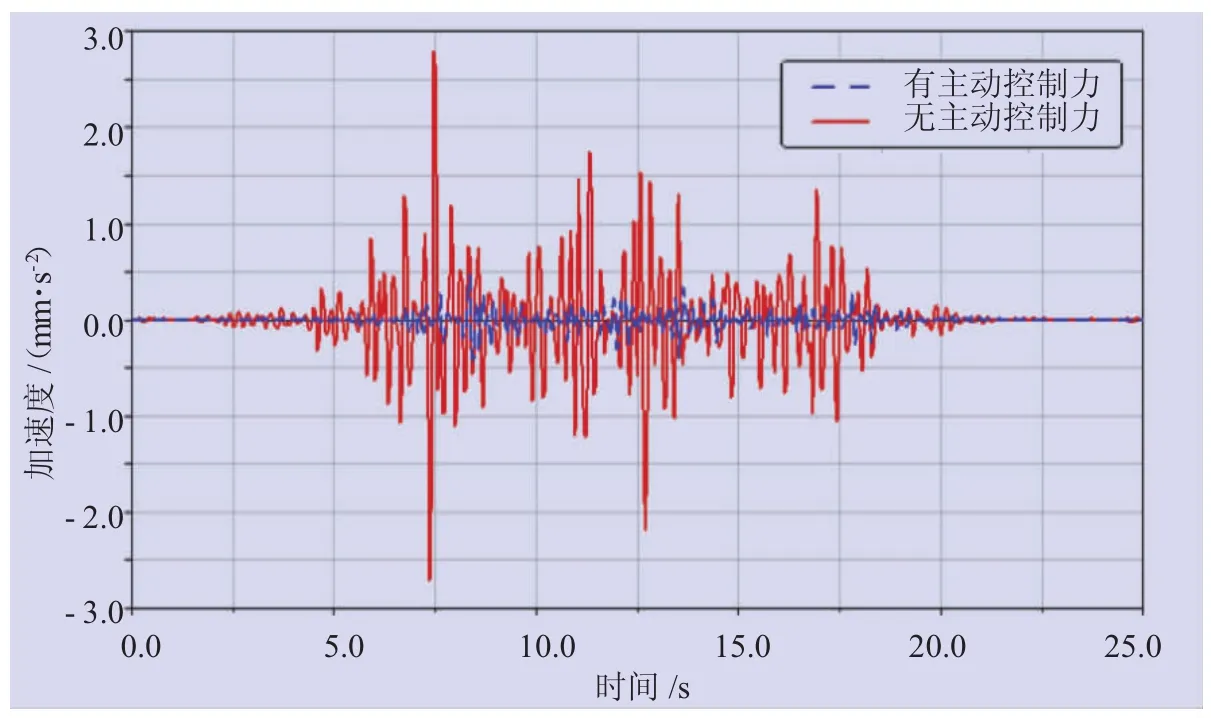
圖11 位移隨機激勵下主動控制力與輸入信號反相位時加速度響應曲線
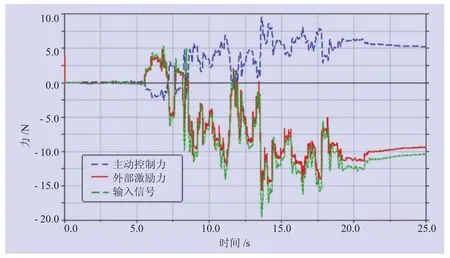
圖12 位移隨機激勵下主動控制力與輸入信號反相位時對比曲線
4 總結
AMD控制的本質是用一個主動控制力來抵消外部激勵力,從而抑制轎廂系統的振動響應,達到減振的目的。改變控制因數,使主動控制力與外部激勵力的大小越接近,系統所受到的合力就越小,系統的振動響應幅值也就越小。
AMD可動質量塊由伺服電機驅動,當外部激勵頻率較高時,相位迅速發生變化,為了抵消外部激勵,所輸出力的相位也要隨之變化。此時,伺服電機的響應速度有可能無法跟上外部激勵的相位變化,進而有可能造成振動幅值的增大。
當采用反相位輸入信號進行控制時,主動控制力與外部激勵力方向相反,可以有效抑制轎廂系統的振動幅度。
對于位移輸入控制,當系統最后由于偏載作用而存在一個恒定靜力并導致系統的位移不為0時,AMD控制結構為了抵消由于偏載而產生的作用力,仍然需要提供一個恒定的反方向控制力。由于AMD控制結構的行程有限,通過慣性力來提供一個恒定力顯然是不可實現的。因此,在采用位移控制時,控制因數不能為一個常數,應該在系統接近穩定時使控制因數逐漸變為0。
[1] 馬燁.高速電梯氣動特性研究[J].裝備機械,2013(2):47-48.
[2] 吳慧,葉文華,沈言,等.高速電梯垂直振動建模與實驗分析[J].機械制造,2013,51(4):19-22.
[3] 王磊,馮永慧,薛金蓮.基于Aduc7026的高速電梯液壓主動導靴控制系統設計[J].機械制造,2011,49(7):25-29.
[4] 嚴濟寬.機械振動隔離技術[M].上海:上海科學技術文獻出版社,1986.
[5]廖小波.高速電梯水平振動實驗系統設計及主動控制仿真研究[D].上海:上海交通大學,2005.
[6]NOGUCHI N,ARAKAWA A,MIYATA K,et al.Study on Active Vibration Control for High-Speed Elevators[J].Journal ofSystemDesign and Dynamics,2011,5(11):164-179.
[7] 豊嶋順彥,上村晃生,永井正夫,その他.AM Dによる超高速エレベータの振動制御(第1報,最適制御理論による検討)[J].日本機械學會論文集(C編),1999,65(637):3479-3485.
[8] 豊嶋順彥,上村晃生,永井正夫,その他.AM Dによる超高速エレベータの振動制御(第2報,実機模擬試験)[J].日本機械學會論文集(C 編),2000,66(647):2181-2186.
[9]劉川.直線電磁驅動AMD主動減振控制系統的研究[D].哈爾濱:哈爾濱工業大學,2007.
[10]卞永明,金曉林,泰利升.集裝箱橋吊吊具的電子主動防搖裝置試驗研究[J].振動、測試與診斷,2005,25(4):292-295.
[11]徐洋,華宏星.AMD結構主動控制系統的建模研究[J].振動與沖擊,2008,27(5):79-80.
[12]李惠,鈴木祥之,吳波.AMD控制結構地震反應的試驗研究[J].振動工程學報,1999,12(2):223-228.
[13]馮永慧,張建武.高速電梯水平振動模型的建立與仿真[J].上海交通大學學報,2007,41(4):557-560.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
數學物理學報(2017年6期)2018-01-22 02:26:40
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
小說月刊(2015年4期)2015-04-18 13:55:18
