BP神經網絡隱含層節點數確定方法研究
2018-04-13 01:06:55王嶸冰徐紅艷
計算機技術與發展 2018年4期
王嶸冰,徐紅艷,李 波,馮 勇
(遼寧大學 信息學院,遼寧 沈陽 110036)
0 引 言
人工神經網絡具有自學習、自組織和優良的非線性逼近能力,因此眾多領域的學者都在對其進行研究和應用。在實際應用中,其中一種人工神經網絡—BP神經網絡(back propagation neural networks,BPNN)最為人們熟知,并廣泛應用于人工智能、圖像處理、優化算法、數據挖掘等重要領域。
在對BPNN進行深入研究的過程中,學者們提出了一個非常重要的、不可忽略的問題,即BPNN隱含層節點數確定問題。由于對神經網絡隱含層節點數的確定缺乏有效的方法,目前僅能憑經驗和不斷地實驗來確定隱含層節點數。針對這個問題,文中提出了一種行之有效的算法,即“三分法”算法。該算法可以簡單、快速地確定BPNN隱含層節點數。
1 相關研究
1.1 BPNN
1986年,Rumelhart等提出了誤差反向傳播法,即BP算法[1]。BPNN能夠實現M-N維的映射關系,而無需事先知道映射關系的數學方程式。BPNN模型由三部分構成:輸入層、隱含層以及輸出層[2],模型圖如圖1所示。
圖1為三層前饋神經網絡,不含Input層,整個網絡含有兩個隱含層Hidden1和Hidden2,一個輸出層Output,各層之間是全連接的關系。
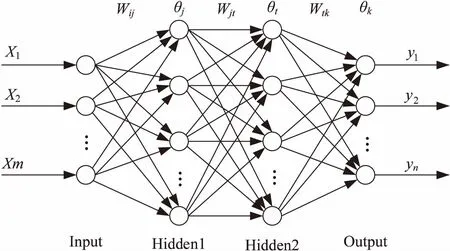
圖1 三層BPNN
BPNN實現了M維到N維的一個非線性映射關系,它包括兩個過程,一是前向傳播過程,二是誤差反向傳播過程。
當一個模式從輸入端輸入網絡之后,這個模式將在BPNN中流動,模式通過權值線路進入每一個隱含層神經元節點,利用激活函數,隱含層各個神經元對其進行加權求和處理,之后經過隱含層和輸出層之間的權值線路進入輸出層單元,處理后在輸出層產生一個輸出模式。在輸入模式轉換成輸出模式的期間,從輸入層到輸出層逐步更新各層狀態的過程即前向傳播過程。接著計算輸出模式和期望模式的誤差,如果誤差大于設定的精度閾值,將誤差順著來路逐層進行反向傳播,接著更新網絡權值。迭代前向傳播和誤差反向傳播這兩個過程,直至所有訓練樣本的誤差平方和都滿足精度要求為止,至此BPNN的整個學習過程就完成了。
1.2 影響BPNN性能的參數
為了設計合理的BPNN,有必要探討影響BPNN性能的參數,影響BPNN性能的參數如下:
(1)隱含層數:隱含層數的增加可以降低網絡誤差,提高精度,但同時也會使網絡復雜性增大,導致網絡的訓練時間被增大和出現“過擬合”傾向的可能性也被增大。
(2)隱含層節點數:在BPNN中,隱含層節點數是一個非常重要的參數,它的設置對BPNN的性能影響很大,而且是“過擬合”現象的直接原因。但遺憾的是,目前理論上還不存在一種科學普遍的確定方法。這個問題將是文中關注的重點。
(3)網絡的初始連接權值:BP算法的先天設計不可避免地使誤差函數會有多個局部極小點存在,網絡初始連接權值不同,可能導致BP算法收斂的結果不同,而這個結果不能確定是全局最優解,有可能是局部最優。
(4)學習率:網絡訓練時,網絡學習的穩定性受到學習率的影響。設定的學習率大,網絡學習速度快,但會導致修正權值時權值會呈現不規則跳躍而無法收斂;設定的學習率小,網絡學習速度慢,可能使網絡收斂于某個極小值,缺點是會導致學習時間過長。
(5)動量系數:為解決易收斂到極小值、訓練時間長等缺陷,引入了動量系數因子[3]。附加動量項能夠使得權值的調整趨于平滑穩定,易找到全局最小值[4]。
2 BPNN與隱含層節點數
2.1 隱含層節點數對BPNN的影響
在BPNN中,隱含層節點數是一個非常重要的參數,它的設置對BPNN的性能影響很大[5],而且是“過擬合”現象的直接原因,目前理論上還沒有一種科學的方法可以確定隱含層節點數。由于輸入輸出層節點數,以及問題的復雜度和轉換函數等都可能影響隱含層節點數的確定,它的確定有了更多的不確定性。
若隱含層節點數太少,那么會使得網絡無法學習;若太多,雖然在一定程度上可以減小系統誤差,但無疑會增加網絡學習的時間,而且會使訓練掉入局部極小點的陷阱,這也是“過擬合”的內在原因。因此,如何合理設計隱含層節點數,是一個不可避免的問題。確定隱含層節點數可以遵循一條基本原則,盡可能取較少的節點數來滿足問題的精度要求。
對非訓練樣本的支持能力稱為網絡泛化能力[6]。而泛化能力與網絡的結構,即隱含層數和隱含層節點數有關[7]。學者Nielson通過理論證明存在一個BPNN,只有一個隱含層,但能夠逼近在閉區間連續的任何函數[8],因此不用考慮隱含層層數問題。
2.2 傳統隱含層節點數的確定方法
隱含層節點數的選擇是個十分復雜的問題,需要設計者有著長期的實踐積累,憑借自己以往的經驗以及借助多次實驗進行確定。隱含層節點數與問題的需求、輸入輸出單元的數目有著不可割舍的直接關系。若數目太少,則BPNN不能獲取足夠的信息用來解決問題需求;若數目太多,會增加學習時間,還會使學習時間過長,卻不能保證最終結果最好,同時可能出現“過擬合”問題。文獻[9]說明最佳的隱層節點數一定存在,如何尋找得到這個最佳節點數是一個值得思考的問題。針對該問題,許多學者給出了各種解決方案[10-13],也提出了不少經驗公式。
(1)
n1=(n+m)1/2+a
(2)
其中,n為輸入層節點數;m為輸出層節點數;a為1~10之間的常數。
n1=log2n
(3)
解決方案總結起來有以下幾類:
(1)實驗法,這是一種最無奈的方法,而且消耗大量的人力;
(2)將解空間限制到某個區間內,在這個解空間中進行暴力破解,雖然簡單,但消耗時間;
(3)引入超平面、動態全參數自調整等概念,這些都使得算法過于復雜,甚至超過了BPNN學習算法的復雜度,運行這些算法需要消耗過長的時間,所以需要思考一種簡單有效的算法。
通過聯立式1~3并求解,可以得到一個關于隱含層節點數的區間[a,b]。這個區間意味著最佳隱含層節點數所在的一個區間,只要在這個區間中尋找,就可以找到它。
第一種方法,最簡單也是最容易想到的,即可以使用暴力破解的思想。所謂的暴力破解法,就是利用整個解空間中的每一個解進行驗證計算。
將[a,b]之內的所有可能解代入BPNN,然后每一個解構成一個BPNN,將所有的樣本通過這些神經網絡進行訓練,從而得到這些BPNN中最小的誤差值,所對應的隱含層節點數即為所求[14]。
暴力破解法由于搜索了整個解空間,因此該算法一定是有效的,但對于時間復雜度而言,當這個區間很小或者測試樣本量很小時,暴力破解算法的時間是可以接受的,但當這個區間特別大或者測試樣本量很大時,所耗費的時間就可能無法容忍,需要繼續改進。
暴力破解法時間消耗過長主要是因為搜索了整個解空間,如果能夠在求解的過程中縮小解空間,那么時間消耗就可以減少,從而優化暴力破解算法。
3 改進的隱含層節點數確定方法
3.1 “三分法”算法思想
二分法查找是在一個有序的數組中進行折半查找,從而將查找算法的時間復雜度降到了O(log2n)。文中借鑒了二分法查找算法思想,但是考慮由于隱含層節點數和誤差的關系的特殊性,不能照搬二分法,需要設計為三分法。
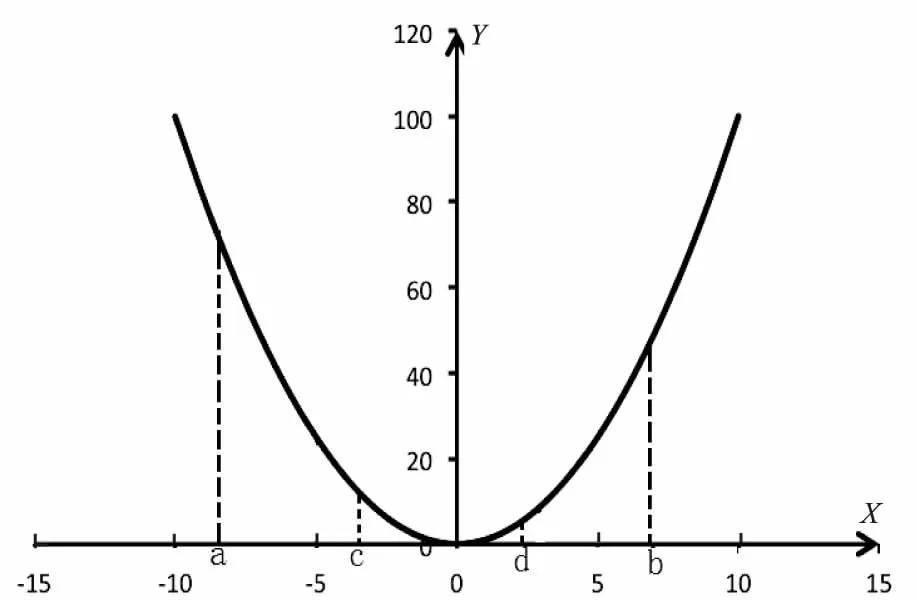
圖2 拋物線曲線
該算法可以一次性去除2/3的不符合選項。如圖2所示的拋物線中,只利用函數值如何查找最低點的位置。
第一種方法可以使用暴力破解。

(4)
當最低點位于區間內時,那么最低點所在的區間的斜率絕對值最小(圖2中為區間[c,d]),且左邊區間的斜率為負,右邊的區間為正。所以要找到最小點,只需從[c,d]之間查找。然后在[c,d]中迭代使用“三分法”,直到[a,b]區間長度小于等于4(不能構成三個斜率),此時只需依次比較這四個節點就可以找到最低點。
通過上述可知,三分法的適用范圍為區間存在最優解,且誤差模型近似為拋物線。通過式1~3獲得區間內一定包含了最優的隱含層節點數,并且也可知它符合拋物線模型。
研究區間很大時,如果忽略一些特殊點形成的“突刺”(一些特殊的點上誤差可能會高于理想的誤差而出現波動,即突刺),那么誤差的模型是一個拋物線模型。拋物線模型最低谷是誤差最小點,也就是最佳的隱含層節點數;從這個點往兩側延伸,隨著遠離這個平衡點,那么誤差會逐漸增大。當隱含層節點數為1時,可以認為這個網絡是無用的;當隱含層節點數是一個正的無窮時,網絡中的冗余知識使得網絡也是不可用的。
至此,可知“三分法”的實質就是將區間[a,b]分成三段,然后研究這三段的變化趨勢,從而預測最優的隱含層節點數存在于哪個區間之內。斜率代表了曲線的變化趨勢,斜率越小,說明變化趨勢越小,也就說明了隱含層節點數就隱藏在這里。
3.2 算法合理性驗證
為了說明算法的合理性,并且為了演示算法的運行步驟,在此先簡要利用其他研究者的實驗成果進行簡單驗證,后面會繼續利用實驗驗證“三分法”算法的合理性。
在文獻[15]中,有一章節研究了隱含層節點數和誤差的關系,這篇論文是關于BPNN對產品質量合格率預測的研究,其實驗結果如圖3所示。
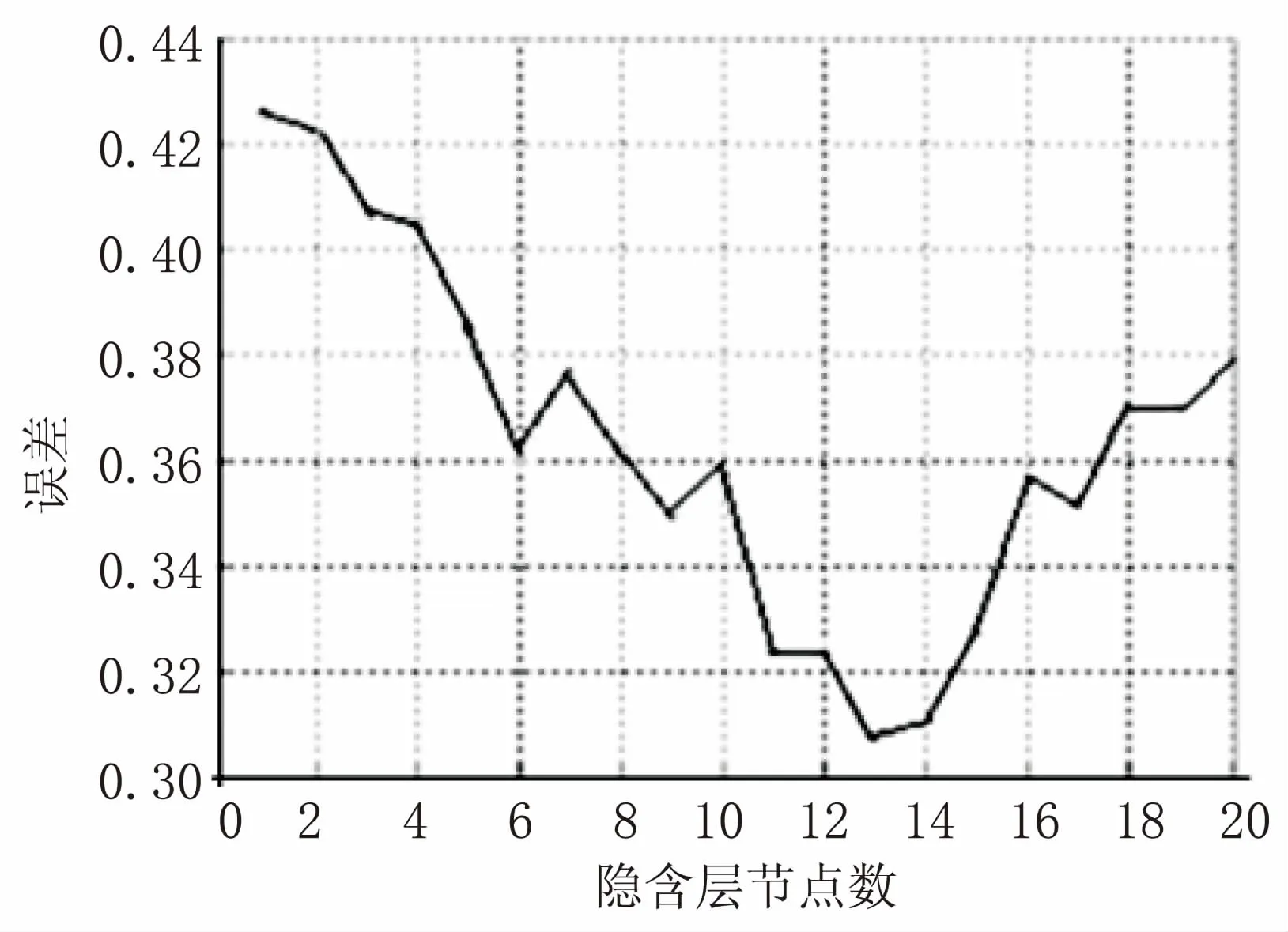
圖3 隱含層和誤差的關系曲線
通過觀察圖3可知,這是一個不規則的拋物線模型,某些地方呈不規則無規律變化,而在整體變化趨勢上卻呈拋物線變化,支持了上文的研究理論。對于這個關系圖,如果使用暴力破解,即依次驗證1~20個節點,那么需要訓練20次,才能確定節點數最優解為13;如果使用三分法,那么很快就確定到節點數為6~13個。
接下來,探討BP網絡隱含層節點數確定步驟。設ki,j表示區間(i,j)的斜率,比如k1,6表示區間(1,6)的斜率。
第一步:因為k1,6<0&&k13,20>0,說明在區間(1,6)誤差在下降,在區間(13,20)誤差在上升,那么說明最優解可能在區間(7,12),所以可取區間(7,12),繼續使用三分法。
第二步:因為k7,8<0&&k9,10<0&&k11,12<0,說明誤差一直在下降,則可選取區間(11,12),如此再比較隱含層節點數11和隱含層節點數12。
第三步:檢測所求解的兩側的兩個點就可以定位到13。
如此只需訓練11次就可找到最優解,比正常的快了幾乎一倍。接下來,仔細分析“三分法”算法思想。
實際上三個區間的方向性共有8種變化。設三個區間的斜率分別為k1,k2,k3,則這三個斜率的變化趨勢可以分為6種情況。
(1)k1<0&&k2>0&&k3<0。
k1<0說明誤差在下降,k2>0說明誤差在上升,k3<0說明誤差在下降,出現這種現象可以認為誤差出現了“跳躍”,因此不能使用“三分法”,而使用普通的暴力破解法效果會更好。
(2)k1<0&&k2>0&&k3>0。
k1<0說明誤差在下降,k2>0說明誤差在上升,k3>0說明誤差在上升,所以可以確定最優解在中間段區間,即使在第一段區間的末尾,由于算法會加一個調節因子,依然可以找到。
(3)k1<0&&k2<0&&k3>0。
該情形與情形(2)類似。誤差變化是第一段區間下降,第二段區間下降,第三段區間上升,所以依然選擇中間段區間。
(4)k1<0&&k2<0&&k3<0。
三者全都小于0,說明誤差一直在下降,所以選擇第三段區間。
(5)k1>0&&k2>0&&k3>0。
三者均大于0,說明誤差一直在上升,所以選擇第一段區間。
(6)其他情況,可以認為區間震蕩,無法確定最優解會出現在哪個區間,需要使用暴力破解法。
由于算法利用的是區間的變化趨勢,所以每一段區間最少為三個點,三個區間則最少需要七個點。因此設置7為臨界值,當區間大小大于等于7時,一律使用暴力破解法。
其次,對于每一種情況,最優解有可能在某個區間的端點出現,這樣的話有可能會錯過這個解,因此為了防止最優解在區間端點出現,加入調節因子m,n。
3.3 “三分法”算法描述
在前面詳細論述了“三分法”算法的求解原理和算法思想,該算法有效且簡單。引入BPNN中,首先構建BPNN,利用求得的節點數區間,代入隱含層構建對應的BPNN,BPNN構建完成后,將訓練樣本依次通過BPNN進行訓練,利用測試樣本測試網絡,這樣最終會得到BPNN的誤差和隱含層節點數的關系。
“三分法”算法流程:
(1)根據經驗公式1~3確定a,b;
(2)如果b-a小于7,跳轉到(8),否則繼續執行;
(3)計算c,d,并獲取ka,c,kc,d,kd,b;
(4)如果ka,c<0&&kc,d<0&&kd,b<0,則a=b,跳轉到(2);否則繼續向下執行;
(5)如果ka,c>0&&kc,d>0&&kd,b>0,則b=c,跳轉到(2);否則繼續向下執行;
(6)如果ka,c<0&&kc,d>0&&kd,b>0,則a=c,b=d,跳轉到(2);否則繼續向下執行;
(7)如果ka,c<0&&kc,d<0&&kd,b>0,則a=c,b=d,跳轉到(2);否則跳轉到(8);
(8)添加調節因子a=a-m,b=b+n,若a小于等于0,重置為1;
(9)暴力求解。
4 實驗結果與分析
4.1 實驗環境
文中采用Java編程技術,使用的開發工具包是jdk1.7,集成開發環境采用Eclipse,它可以很好地支持Java應用程序編程。Matlab是一種很強大的工具,集成了計算、可視化和程序設計等功能,有多種工具箱,其中包括神經網絡工具箱。神經網絡工具箱包括不同神經網絡模型的網絡學習和訓練函數,其中就有BPNN,包括BPNN的新建、訓練、測試,為BPNN的仿真實驗提供了便利。
4.2 隱含層節點數確定實驗
為了驗證“三分法”算法的正確性,需要進行兩部分實驗。首先需要驗證BPNN誤差和隱含層節點數的關系,其次需要進行“三分法”算法的驗證。
實驗采用UCI上的數據集Wine-data,對三個不同品種的葡萄酒分別進行化學分析,從中分析出主要成分并記錄該值。該數據集的任務就是實現數據分類,從而區分其所屬品種。
實驗獲取到的結果如圖4所示。
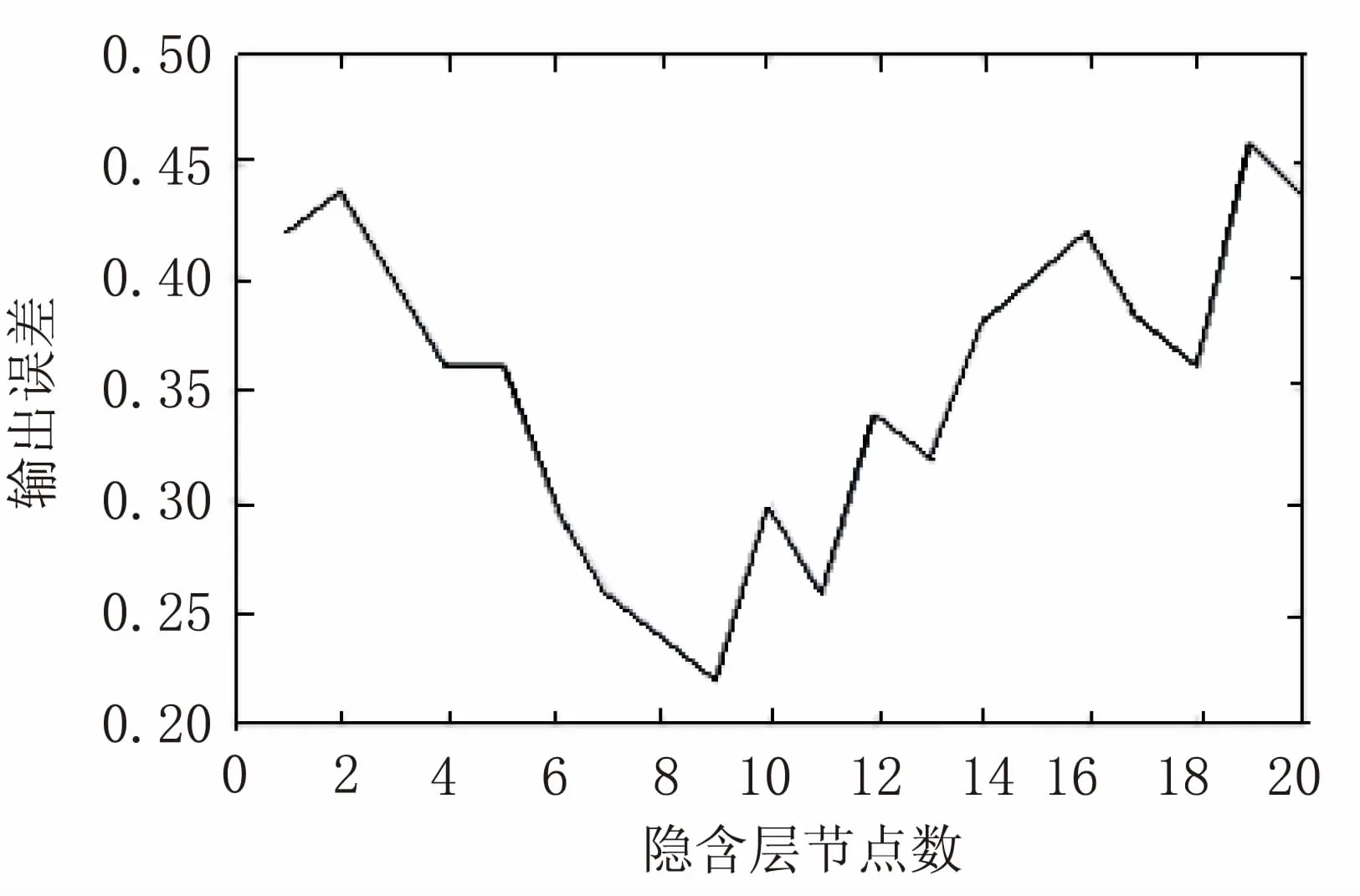
圖4 網絡誤差與隱含層節點數的關系
通過對Wine-data數據集的實驗,發現隱含層節點數與誤差的關系基本符合拋物線的形式,證明了“三分法”算法的基礎是有效的。而通過對這組實驗結果使用“三分法”算法,最終可以獲取到最佳解。程序運行過程中a,b,c,d(m,n均設置為0)變化是:
(1)a=1,c=7,d=13,b=20;
(2)a=7,c=9,d=11,b=13;
(3)a=9,b=11。
傳統確定隱含層節點數的方法,需要實驗節點數為1~20共20次的實驗,而新的“三分法”算法實驗只需要進行1,7,9,10,11,13,20共7次實驗,速度提高了1.8倍,證明了“三分法”算法相對于傳統方法有了明顯的改進。
5 結束語
針對BPNN結構難以確定的問題,提出了“三分法”算法。通過參考相關文獻、研究已有成果,發現BPNN的誤差和隱含層節點數的關系基本符合拋物線模型,所以可以通過研究誤差的趨勢,很快定位到最優解的位置,這是“三分法”算法的基礎。同時,為了解決不符合拋物線模型的情況,增強“三分法”算法的魯棒性,結合了暴力破解法。通過示例演算可知,“三分法”算法可以快速、有效地確定隱含層節點數,是一種行之有效的算法。
參考文獻:
[1] RUMELHART D E.Learning representation by back-propagating errors[J].Nature,1986,323(6088):533-536.
[2] 周啟超.BP算法改進及在軟件成本估算中的應用[J].計算機技術與發展,2016,26(2):195-198.
[3] 師 黎,陳鐵軍.智能控制理論及應用[M].北京:清華大學出版社,2009:104-105.
[4] 王晶晶,王 劍.一種BP神經網絡改進算法研究[J].軟件導刊,2015,14(3):52-53.
[5] BAHADIR E.Prediction of prospective mathematics teachers' academic success in entering graduate education by using back-propagation neural network[J].Journal of Education and Training Studies,2016,4(5):113-122.
[6] 周冬冬.BP神經網絡樣本數據預處理應用研究[D].重慶:重慶大學,2011.
[7] 李武林,郝玉潔.BP網絡隱節點數與計算復雜度的關系[J].成都信息工程學院學報,2006,21(1):70-73.
[8] AZGHADI S M R,BONYADI M R,SHAHHOSSEINI H.Gender classification based on feed forward back propagation neural network[C]//International conference on artificial intelligence & innovations:from theory to applications.[s.l.]:[s.n.],2007:299-304.
[9] RASTEGAR R,HARIRI A.A step forward in studying the compact genetic algorithm[J].Evolutionary Computation,2006,14(3):277-289.
[10] 沈花玉,王兆霞,高成耀,等.BP神經網絡隱含層單元數的確定[J].天津理工大學學報,2008,24(5):13-15.
[11] 張德賢.前向神經網絡合理隱含層結點個數估計[J].計算機工程與應用,2003,39(5):21-23.
[12] 夏克文,李昌彪,沈鈞毅.前向神經網絡隱含層節點數的一種優化算法[J].計算機科學,2005,32(10):143-145.
[13] 田國鈺,黃海洋.神經網絡中隱含層的確定[J].信息技術,2010(10):79-81.
[14] KHANLOU H M,SADOLLAH A,ANG B C,et al.Prediction and optimization of electrospinning parameters for polymethyl methacrylate nanofiber fabrication using response surface methodology and artificial neural networks[J].Neural Computing and Applications,2014,25:767-777.
[15] 溫 文.基于改進BP神經網絡的產品質量合格率預測研究[D].廣州:華南理工大學,2014.
猜你喜歡
語數外學習·高中版上旬(2024年18期)2024-02-20 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化(高中版.高二數學)(2022年1期)2022-04-26 13:59:56
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·中考版(2021年10期)2021-11-22 07:26:38
中學生數理化·中考版(2019年10期)2019-11-25 09:39:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·中考版(2017年10期)2017-04-23 06:29:38
中學生數理化(高中版.高二數學)(2017年1期)2017-04-16 05:33:44
發明與創新(2016年38期)2016-08-22 03:02:52