輔助人體站立系統(tǒng)的研究與設計
2018-04-13 01:06:54蘇明亮王新安覃元元
計算機技術與發(fā)展 2018年4期
蘇明亮,王新安,覃元元,何 想
(北京大學深圳研究生院,廣東 深圳 518055)
0 引 言
隨著全球人口老齡化趨勢的加劇,老年人的市場需求越來越受到關注。由于生理機能逐年下降,下肢力量愈發(fā)不足,不少老年人存在站立困難的問題[1]。另外,脊髓損傷患者、膝關節(jié)乏力病人、下肢殘疾人等,也面臨同樣困境。為了解決老年人和患者站立困難的問題,國內(nèi)外眾多專家學者進行了大量研究,提供了一些性能可靠的輔助站立方案,幫助老年人和患者自行站立,同時鍛煉和調節(jié)他們的下肢肌肉,改善他們的生活自理能力。
隨著計算機科技和嵌入式技術的高速發(fā)展,輔助站立系統(tǒng)也逐漸向高科技化、高性能化、高可靠性發(fā)展。美國公司Endorphin推出的一款輔助站立座椅[2],通過使用閉環(huán)式調節(jié)系統(tǒng),協(xié)助使用者進行站立訓練,能夠鍛煉他們的下肢力量,改善心肺適應性。意大利一家公司設計了一款名為StruzzoPlus[2]的站立裝置,既可調節(jié)座椅的高度,又可通過兩側扶手和腿部靠墊提供支撐力,幫助使用者完成站立動作。相比國外,國內(nèi)的站立研究仍處于實驗探索階段;哈爾濱工業(yè)大學提出的起立康復機器人[3]和平面連桿輔助起立系統(tǒng)[4],采用兩種不同的裝置結構進行實現(xiàn),幫助使用者完成康復訓練,具有較高的研究價值和醫(yī)學價值。但由于高昂的研究成本和用于康復治療的目的,輔助站立設備在國內(nèi)普通家庭難以得到大規(guī)模的推廣與應用。
文中通過建立人體數(shù)學模型模擬正常站立動作,進行運動學研究和分析;提出一種兩自由度的輔助裝置結構,并且結合座椅壓力和足底壓力實現(xiàn)符合人體站立過程的輔助裝置控制系統(tǒng)。為適應使用者不同的體重和實現(xiàn)穩(wěn)定安全的驅動效果,選擇光電式編碼器TRD-NA1024NW、霍爾傳感器3144[5]實現(xiàn)閉環(huán)系統(tǒng),加入緊急按鈕裝置和防漏電模塊、電機減震設計等,提高系統(tǒng)的安全性與可靠性;并且通過足底壓力對比實驗,檢驗輔助站立系統(tǒng)對人體實際站立過程中起到的作用。
1 站立過程運動學分析
人身上有六百多種肌肉、兩百多個大小關節(jié),即便完成一個簡單的動作,也需要依靠多種肌肉、關節(jié)、神經(jīng)進行配合。人體站立過程中,大腿的所有肌群、小腿的所有肌群,以及背肌、腹肌等都會發(fā)揮作用;肌肉克服身體重力、地面摩擦力,完成人體向上、向前的動作[6-7]。
每個人站立的動作不盡相同,但是都有一定的規(guī)律。站立過程中主要依靠大腿、小腿的肌群,以及3個自由度的運動,即髖關節(jié)、膝關節(jié)和踝關節(jié)的旋轉運動[8]。觀察、分析、試驗,尋找人體站立的特征點,進行運動學分析;然后在這個基礎上,設計輔助站立系統(tǒng)提供合適的動力和速度。
1.1 人體站立過程分析
經(jīng)研究,人體站立運動過程通常分為三個階段。第一階段:身體向前傾斜,雙腳向后撐地,臀部和腳部同時用力,產(chǎn)生站起過程所需的動力,此時人體重心保持不變,屬于人體站立的準備階段;第二階段:臀部離開座位,腳部持續(xù)用力,人體向前向上同時運動,此時重心向前上方移動;第三階段:身體依靠慣性繼續(xù)運動,基本只向上運動,直到人體完全站立,此時重心達到最高點[9-10]。
人體站立在前兩個階段需要用到的力氣最大,也是輔助站立系統(tǒng)最需要提供動力的時間點。人體坐下運動過程與站立運動過程比較類似,可以根據(jù)人體站立運動過程進行逆向分析。
1.2 數(shù)學模型簡化
人身上有六百多種肌肉、兩百多個大小關節(jié),如果對人體站立的所有自由度都進行分析,分析過程會過于復雜,也難以得到想要的結果。因此,結合數(shù)據(jù)建模的思想,需要對人體模型進行簡化。以人體測量學中的正中矢狀平面作為標準面,并且以地面為固定參考坐標系XOY,建立人體站立數(shù)學模型[11-12]。人體站立模型主要包括髖關節(jié)、膝關節(jié)、踝關節(jié)、上身、大腿、小腿、腳;其中包含的髖關節(jié)、膝關節(jié)和踝關節(jié)3個自由度,完成人體下肢運動。
1.3 人體站立運動學分析
建立的人體數(shù)學模型包含髖關節(jié)、膝關節(jié)、踝關節(jié)、上身、大腿、小腿、腳。假設髖關節(jié)的坐標為(xk,yk),膝關節(jié)的坐標為(xq,yq),踝關節(jié)的坐標為(xl,yl),臀部的坐標為(xt,yt),小腿、大腿、上身與水平面間的夾角分別為θ1、θ2、θ3,小腿的長度為l1,大腿的長度為l2,上身的長度為l3。選定踝關節(jié)為原點,即(xl,yl)設為(0,0)。
下面分別計算膝關節(jié)、髖關節(jié)的質心位置以及臀部的運動情況。
由數(shù)學關系和踝關節(jié)設定的條件,可得膝關節(jié)的坐標(xq,yq)[13]:
(1)
同理,髖關節(jié)的坐標(xk,yk)為:
(2)
結合上述兩式,化簡可得人站立過程中髖關節(jié)的坐標:
(3)
由l1,l2的變換矩陣,以及膝關節(jié)的坐標和髖關節(jié)的坐標,可得臀部的齊次變換矩陣,并進一步得到其位置和角度[13]:
(4)
(5)
(6)
對上式求導,可得臀部的速度為:
(7)
再對速度公式求導,可得臀部的加速度為:
(8)
2 輔助站立系統(tǒng)分析與結構設計
2.1 站立過程測量實驗
根據(jù)上述的位移、角度、速度、加速度公式,進一步通過實驗測量人體站立過程中臀部(或髖關節(jié))的運動情況。選擇16名身高(1.60~1.75 m)、體重(50~75 kg)有區(qū)別的正常人作為實驗者,在規(guī)定的時間(通過50次站立測量,采用頻次最大的2 s)內(nèi)進行站立運動;通過單反相機以0.1 s的時間間隔獲取實驗者髖關節(jié)的運動軌跡數(shù)據(jù)。
實驗要求:實驗者上身挺直,雙目平視,雙手合十放在胸前,雙腳自然放平,臀部自然坐在座椅的正中央處(以座椅質心在地面的映射點為坐標原點)。腳底和座椅上放置壓力測試裝置;腰部掛靠并固定在臀部位置的角度測量裝置。實驗者在規(guī)定時間2 s內(nèi),完成從坐姿到站立的自然動作。為了保證實驗的準確性,在實驗前讓實驗者參與三次訓練,然后實驗記錄五組數(shù)據(jù),并選擇誤差最小的一組作為實驗最終輸出[9]。
此處選擇5名身高體重有差異的實驗者(P1:身高1.68 m,體重65 kg;P2:身高1.72 m,體重72 kg;P3:身高1.65 m,體重70 kg;P4:身高1.75 m,體重75 kg;P5:身高1.70 m,體重74 kg)的測試數(shù)據(jù)進行分析。
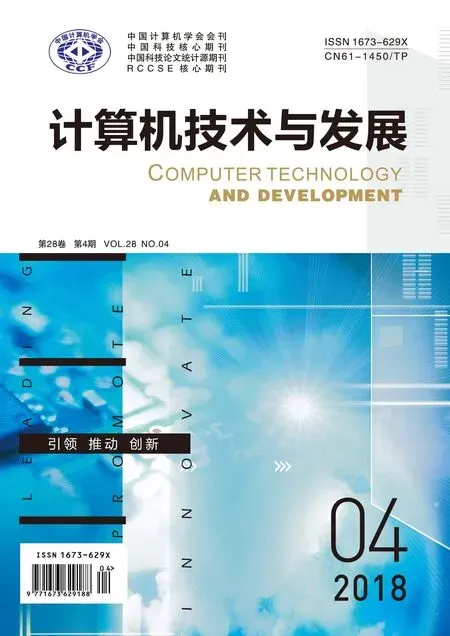
根據(jù)髖關節(jié)在規(guī)定時間范圍內(nèi)水平方向和豎直方向上的運動位移數(shù)據(jù),分別繪制出相應的位移曲線。人體站立過程中髖關節(jié)的水平方向運動X-Time曲線(單位:m)如圖1所示,髖關節(jié)的豎直方向運動Y-Time曲線(單位:m)如圖2所示。
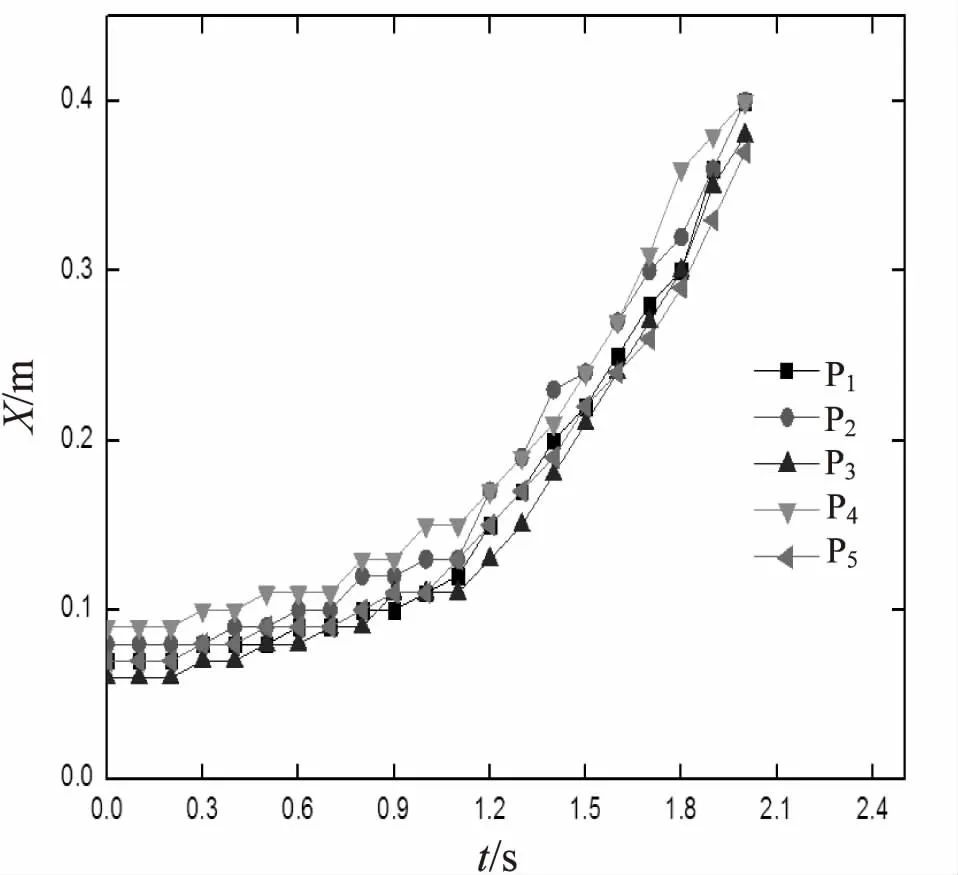
圖1 髖關節(jié)水平方向位移曲線
通過固定的角度測量裝置獲取實驗者在站立過程中不同時間點臀部的角度,其變化曲線如圖3所示。
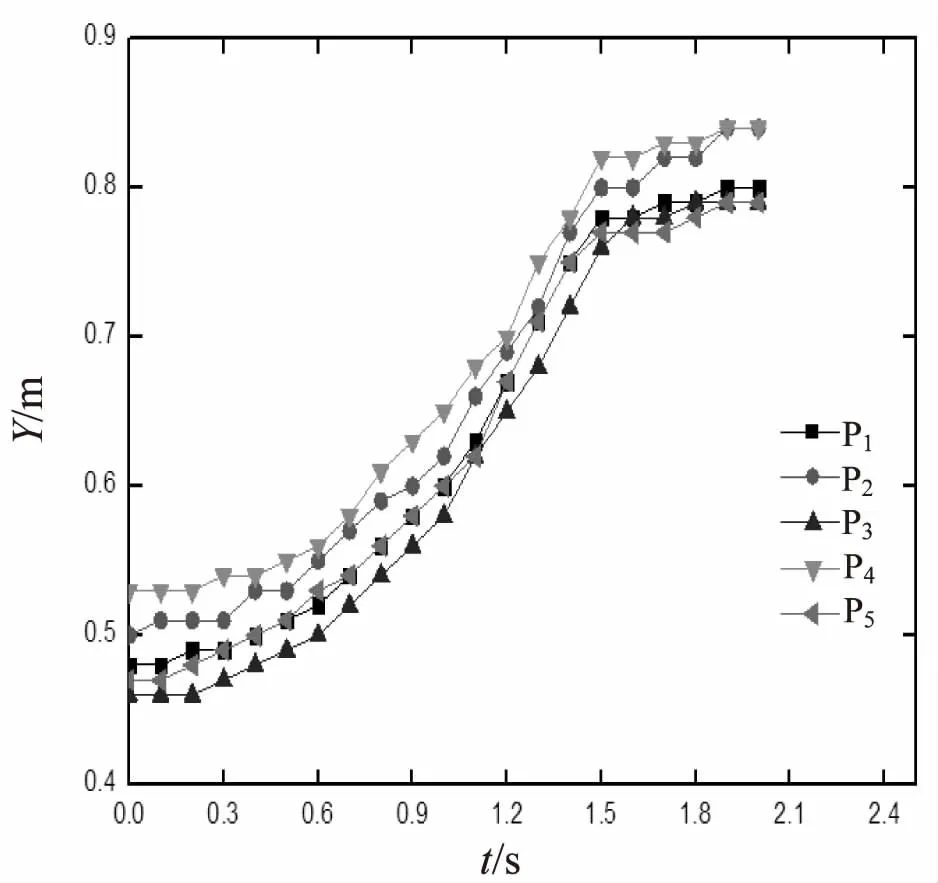
圖2 髖關節(jié)豎直方向位移曲線
圖3 臀部角度變化曲線
從圖1和圖2的運動軌跡可以看出,實驗者的站立過程大致可以分為三段:在0.0~0.85 s內(nèi),髖關節(jié)水平和豎直方向都作緩慢運動,水平運動斜率0.037±0.002 m/s,豎直運動斜率0.100±0.020 m/s;在0.85~1.5 s內(nèi),髖關節(jié)水平和豎直方向都作較快勻速運動,水平運動斜率0.172±0.015 m/s,豎直運動斜率0.314±0.035 m/s;在1.5~2.0 s內(nèi),髖關節(jié)水平方向繼續(xù)保持較快運動,豎直方向又恢復到緩慢運動的過程,水平運動斜率0.330±0.035 m/s,豎直運動斜率0.040±0.010 m/s。
比較圖1內(nèi)的位移曲線,曲線④為身高偏高(1.75 m)的實驗者,曲線③為身高偏低(1.65 m)的實驗者,曲線④的初始值和結束值與曲線③接近,而且變化趨勢類似;比較圖2內(nèi)曲線④和曲線③的變化,二者的初始值和結束值有明顯區(qū)別,曲線③處于最低處,曲線④處于最高處,二者變化趨勢類似。因此,輔助裝置需要座椅起始和結束高度自適應,提供豎直方向不同的助力,適配不同身高的使用者進行使用。
比較圖1內(nèi)的位移曲線,曲線④為體重偏重(75 kg)的實驗者,曲線①為體重偏輕(65 kg)的實驗者,曲線④和曲線①的斜率無明顯區(qū)別;比較圖2內(nèi)曲線④和曲線①的變化,曲線①的斜率要略微高于曲線④,二者變化趨勢類似,曲線①更加平滑。因此,輔助裝置需要適配體重偏大的使用者,避免影響系統(tǒng)的供力裝置、運行速度;可考慮采用閉環(huán)系統(tǒng),進行反饋調節(jié),解決個體體重差異帶來的問題。
比較臀部角度變化曲線,如圖3所示,在站立過程中,臀部角度逐漸變大(變化范圍20°~-80°)。臀部角度變化體現(xiàn)在,站立過程中,身體前傾,臀部角度變大,力矩減小,減少對肌肉的壓力,更易于站立。因此,輔助裝置需要提供臀部座椅的傾斜助力,以及背部、小腿的輔助支撐力,輔助臀部完成較大角度的變化。
2.2 輔助裝置的結構設計
結合實驗分析可知,輔助站立裝置需要提供給使用者水平向前和豎直向上的助力、臀部傾斜助力,以及給背部、臀部提供支撐力。輔助站立裝置的結構設計有多種方式,如圖4(a)所示。一款起立康復機器人裝置結構[3]中,共有三個滑塊提供助力。滑塊1提供豎直向上的動力,滑塊2提供水平向前的動力,滑塊3與彈簧結合使用起到減震的作用。起立康復機器人裝置結構明晰易懂,但是需要充分協(xié)調滑塊1和滑塊2的速度和助力大小,滿足站立過程中向前上方的運動曲線。如圖4(b)所示,基于平面連桿的輔助站立系統(tǒng)[4]通過三個連桿提供助力。連桿AB提供動力并且調節(jié)角度變化,帶動其余兩個連桿進行運動,在運行過程中始終保持兩個桿件平行,確保座椅始終處于水平。該結構設計較為巧妙,但是升降的高度受限,需要較大的力矩完成。
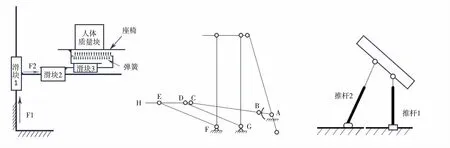
圖4 輔助裝置的結構設計
結合站立過程測量實驗,可以知道人體站立過程中水平方向上的運動位移x的變化、豎直方向上的運動位移y的變化以及臀部的角度θt的變化;如圖4(c)所示,提出一種兩自由度輔助裝置的動力學模型,由于在站立過程中人與座椅、地面之間存在摩擦力,需要增強座椅和地面的粗糙程度,防止站立過程中打滑;推桿1用來提供人站立過程向上的推力,推桿2由推桿1帶動旋轉的同時,自身產(chǎn)生斜向上的推力;二者始終保持座椅的平面與水平面的夾角符合人體站立過程中臀部的角度變化。另外,座椅間加入彈簧起到協(xié)調運動的作用,讓人體在站立過程中起到更大的緩沖空間。
假設推桿1高度為h1,推桿2高度為h2,座椅的平面與水平面的夾角為θ,座椅長度為a,在不考慮摩擦力和彈性緩沖的情況下,可得這三者之間的關系為:
(9)
由此可見,通過控制推桿1和推桿2的速度,能夠控制座椅的升降度,并結合實驗數(shù)據(jù)模擬人體正常站立時臀部的運動規(guī)律,調整座椅的傾斜度與腳墊的摩擦程度,滿足人體工程學,達到輔助站立的目的。
3 輔助站立系統(tǒng)的設計
3.1 系統(tǒng)整體架構設計
根據(jù)圖4(c)的結構設計以及系統(tǒng)功能,文中設計實現(xiàn)的輔助人體站立系統(tǒng)主要包括控制單元、傳感單元、電機控制單元、交互單元以及供電單元。其中,控制單元中選擇主流的、資源較為豐富的STM32F103作為主控芯片,重點完成傳感輸入反饋與機電的閉環(huán)控制策略;傳感單元包括足底壓力、座椅壓力、陀螺儀等傳感模塊,采集數(shù)據(jù)進行監(jiān)控,協(xié)調主控芯片進行機電控制;電機控制單元主要包括電動推桿、光電式編碼器、霍爾傳感器等,主要實現(xiàn)閉環(huán)控制的效果;交互單元主要包括輸入單元、按鍵控制單元,提高系統(tǒng)的交互友好性;而供電單元主要包括電源管理模塊、防漏電裝置,提高系統(tǒng)的安全性。系統(tǒng)整體架構如圖5所示。
3.2 傳感單元和交互單元
傳感單元包括足底壓力、座椅壓力、陀螺儀等傳感模塊。足底壓力模塊可以通過判斷腳底壓力是否劇增,確定使用者是否需要站立,從而啟動輔助站立系統(tǒng);座椅壓力模塊可以通過判斷臀底壓力是否低于原來坐下的臀底壓力的5%,確定使用者是否已經(jīng)完成站立。此外,可以通過綜合足底壓力和座椅壓力的情況,調整電機輸出的轉矩。陀螺儀模塊主要用于測量推桿電機在運行過程中的角速度,通過檢測電機過速或過緩造成的角速度偏移預設值的情況,采取緊急應對措施。此外,通過陀螺儀計算座椅的角度值也是驅動系統(tǒng)啟動與停止的重要標志。
交互單元主要包括輸入單元、按鍵控制單元。輸入單元可以輸入使用者的身高,控制系統(tǒng)會相應地調整電機運行參數(shù);按鍵控制單元包括系統(tǒng)緊急制動按鈕,以及電機手動控制按鈕,為使用者提供可選的控制方案。
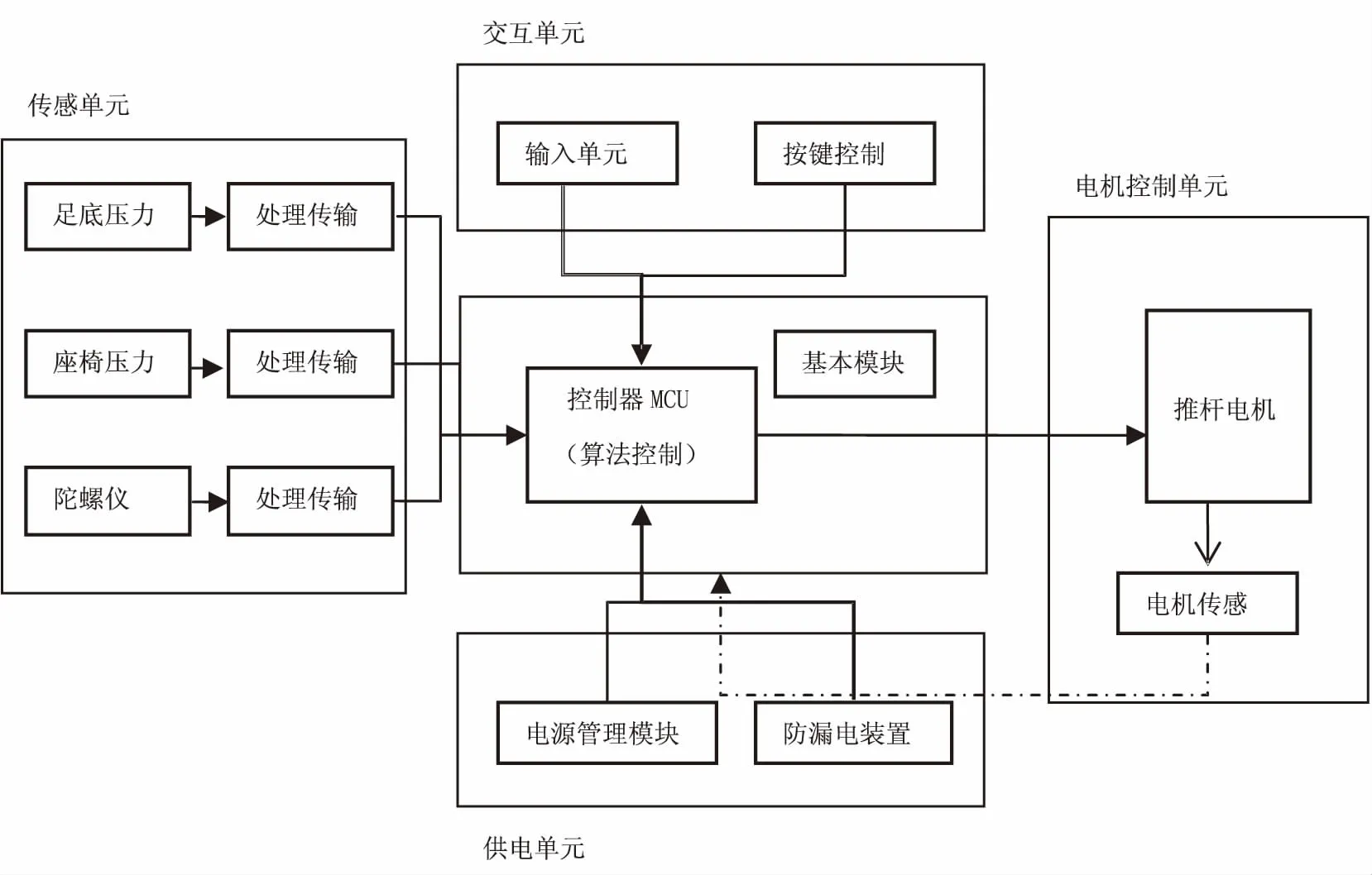
圖5 系統(tǒng)整體架構
3.3 電機控制單元
文中采用的電機控制單元,以STM32F103作為主控芯片,結合光電式編碼TRD-NA1024NW、霍爾傳感器3144[5]進行閉環(huán)反饋調節(jié),實現(xiàn)PID控制。根據(jù)使用者的體重和自身作用力大小施加作用力,有效控制電機的轉速,模擬人體正常的起身站立過程。
主控制芯片STM32F103預設座椅的支承力大小和左右兩側推桿電機初始速度大小,將控制指令發(fā)給驅動器;驅動器輸出相應大小的電流來控制推桿電機輸出相應的轉矩,同時電機的實際工作電流反饋給霍爾傳感器、轉速反饋給編碼器。主控芯片根據(jù)反饋的實際電流值、轉速值與預設值進行比較,對輸出電流實時調整從而維持輸出轉矩的穩(wěn)定。當驅動器或電機出現(xiàn)異常情況時,故障信號輸出給控制器,控制器進行緊急制動。
3.4 系統(tǒng)驗證實驗
通過理論分析和模型建立可知,人體在站立過程中,身體的重量通過髖關節(jié)、大腿骨骼、小腿骨骼傳至踝關節(jié),最后通過足底傳至地面。兩只腳的足底壓力相應表征了各關節(jié)、骨骼以及肌肉的承力大小[14-15]。通過對比實驗,驗證輔助裝置在人站立過程中對下肢關節(jié)、肌肉減輕的作用。
選擇一名身高1.72 m、體重68 kg的正常人作為實驗參與者,在使用輔助裝置和不使用輔助裝置兩種情況下限定時間正常站立(不借助扶手),分別進行五次測試;測試過程中,壓力測試裝置對實驗者的足底壓力實時變化進行采集。去除誤差較大的測試數(shù)據(jù),篩選站立時間接近的兩組對照數(shù)據(jù)進行比較。實驗者在不用和使用輔助裝置的足底壓力變化情況如圖6所示。
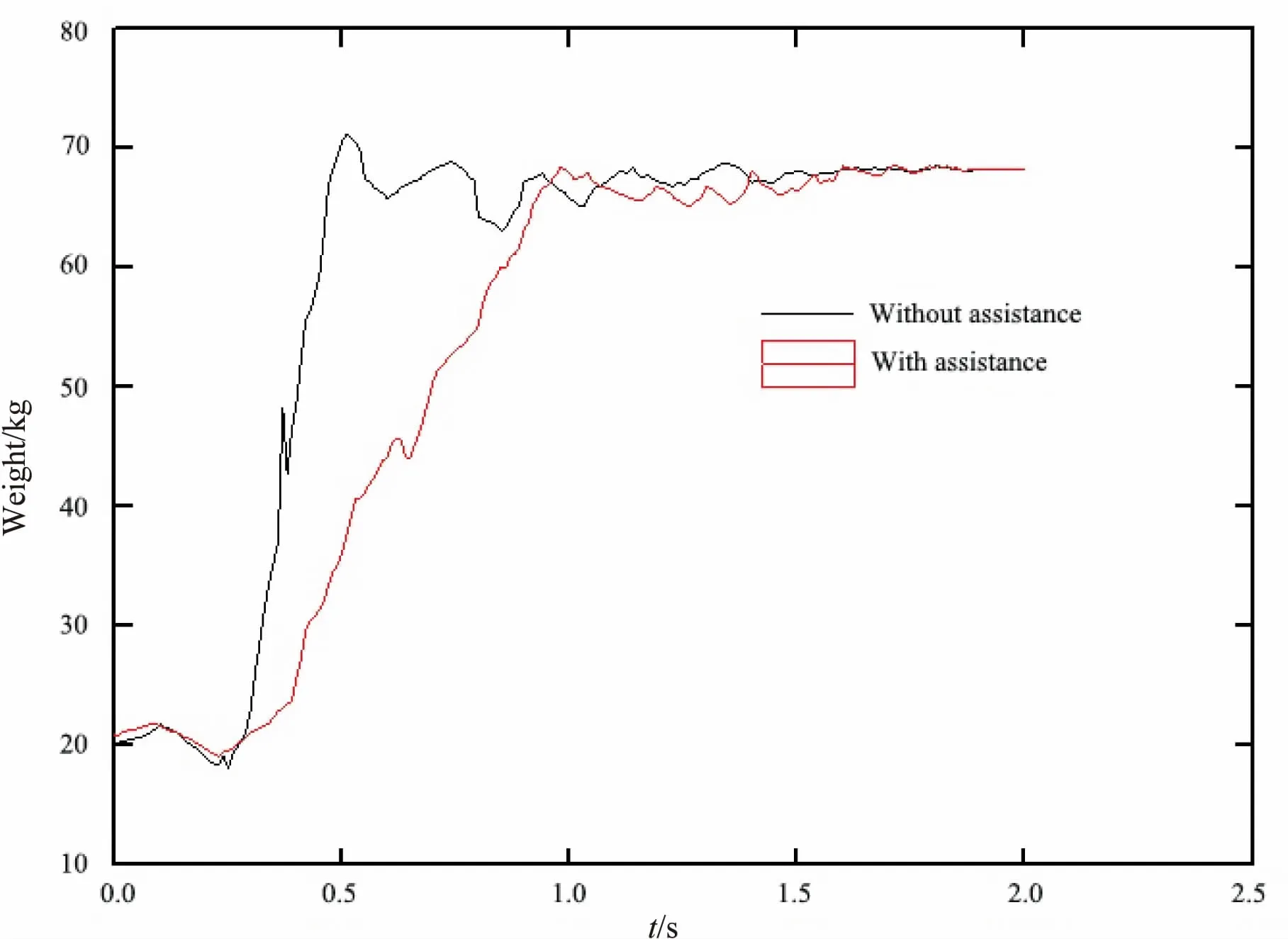
圖6 足底壓力曲線
通過不用輔助裝置的曲線可知,人體站立過程中,當臀部接觸座椅過程中,足底壓力逐漸上升;當臀部離開座椅瞬間,足底壓力急劇上升,超過人體正常體重值;當身體繼續(xù)向上伸直到完全站立的過程中,足底壓力在體重值附近波動。
通過對比兩條曲線可以發(fā)現(xiàn),在使用輔助裝置站立時,花費的時間與正常站立接近,足底壓力趨勢也有類似:壓力值先快速增加,然后緩慢增加。相比不用輔助裝置的壓力曲線,使用輔助裝置的壓力曲線前期沒有急劇增長的過程,而是基本處于緩慢增長,后期趨于平穩(wěn),接近人體正常體重。說明足底承受壓力在整個過程變小,尤其在站立的瞬間,原本需要的沖力給足底帶來壓力以及關節(jié)的承受力得到較大的緩解。輔助站立裝置在人體站立過程中起到減輕下肢負擔的作用,降低正常站立時起身瞬間帶來的沖擊力,較好地保護了下肢關節(jié)和腳部的支撐。
4 結束語
基于人機工程學原理建立人體數(shù)學模型,簡化模型模擬人體正常站立運動,進行運動學分析和人體站立運動實驗。根據(jù)數(shù)據(jù)建模和實驗結果,設計一款兩自由度的輔助站立控制系統(tǒng)。通過足底壓力對比實驗,證明該系統(tǒng)在人體實際站立過程中起到了一定的助力效果。結合計算機技術和自動化嵌入技術,輔助站立系統(tǒng)可以應用于多個場景,如日常生活、康復治療等等。該系統(tǒng)仍有一些不足之處,需要進一步解決與完善,比如可增加腿部前后固定靠墊等,更好地滿足人體力學的要求,并且在機械結構和響應速度方面有進一步的優(yōu)化空間。
參考文獻:
[1] 咸曉艷.從需求談中國老年人日常生活用品設計[D].濟南:山東輕工業(yè)學院,2011.
[2] KAMNIK R,BAJD T.Standing-up robot:an assistive rehabilitative device for training and assessment[J].Journal of Medical Engineering & Technology,2004,28(2):74-80.
[3] 姜洪源,馬長波,李姍姍.一種新型輔助起立康復機器人的設計及逆運動學分析[J].中國康復醫(yī)學雜志,2009,24(2):162-164.
[4] 李姍姍.人體起立過程建模與起立功能康復訓練控制系統(tǒng)研究[D].哈爾濱:哈爾濱工業(yè)大學,2009.
[5] 王才東.六自由度教學機器人控制系統(tǒng)設計及實驗研究[D].哈爾濱:哈爾濱工程大學,2008.
[6] 歐陽文昭,廖可兵.安全人機工程學[M].北京:煤炭工業(yè)出版社,2002.
[7] 崔來友,白士紅,張春林,等.人體運動學模型的研究[J].機械設計與研究,2003,19(6):10-12.
[8] CONDIE E,CONDIE D. Functional electrical stimulation:standing and walking after spinal cord injury[J].Physiotherapy,1990,76(4):223.
[9] 王志強,姜洪源,Roman Kamnik.康復機器人輔助站立人體質心動量測試及模擬[J].吉林大學學報:工學版,2015,45(3):844-850.
[10] FUJISAWA N,MASUDA T,INAOKA Y,et al. Human standing posture control system depending on adopted strategies[J].Journal of Medical & Biological Engineering & Computing,2005,43(1):107-114.
[11] 孟慶鑫.穿戴式下肢康復外骨骼步態(tài)與控制策略研究[D].長春:長春理工大學,2014.
[12] ARTEMIADIS P K,KREBS H I.On the control of the MIT-Skywalker[C]//International conference of the IEEE engineering in medicine & biology.[s.l.]:IEEE,2010:1287-1291.
[13] 馬志飛.輔助起立康復機器人控制系統(tǒng)的仿真與實驗研究[D].哈爾濱:哈爾濱工業(yè)大學,2011.
[14] 王志強,姜洪源,Roman Kamnik.基于輔助起立機器人的人體起立動力學建模與試驗研究[J].力學學報,2014,46(3):457-464.
[15] 陳云菲.基于FES的起立功能康復機器人設計及相關技術研究[D].哈爾濱:哈爾濱工業(yè)大學,2008.