一種基于逆向?qū)Ш降碾p軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)自標(biāo)定方法
2018-04-12 01:42:18任宏文曹亞林李文耀
導(dǎo)航定位與授時(shí) 2018年2期
林 山,任宏文,曹亞林,李文耀,劉 輝
(北京自動(dòng)化控制設(shè)備研究所,北京100074)
0 引言
誤差標(biāo)定技術(shù)是慣導(dǎo)系統(tǒng)的關(guān)鍵技術(shù)之一,通過事先對(duì)系統(tǒng)誤差參數(shù)進(jìn)行估計(jì)標(biāo)定,在實(shí)際導(dǎo)航過程中對(duì)誤差進(jìn)行補(bǔ)償,從而消除系統(tǒng)誤差參數(shù)對(duì)導(dǎo)航精度的影響[1]。采用系統(tǒng)級(jí)標(biāo)定方法,通過觀測(cè)系統(tǒng)導(dǎo)航誤差,根據(jù)誤差方程反推出引起導(dǎo)航誤差的參數(shù)誤差,能夠降低對(duì)標(biāo)定設(shè)備的要求,提升標(biāo)定效率。雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)自身的旋轉(zhuǎn)機(jī)構(gòu)的精度滿足系統(tǒng)級(jí)標(biāo)定的要求,因此可利用其實(shí)現(xiàn)自標(biāo)定,從而免去了慣導(dǎo)系統(tǒng)從載體上拆卸、利用轉(zhuǎn)臺(tái)標(biāo)定后再次安裝的環(huán)節(jié),很大程度上降低了標(biāo)定的工作時(shí)間和成本,提高了慣導(dǎo)系統(tǒng)的可靠性和可維護(hù)性[2]。因此自標(biāo)定技術(shù)成為雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)標(biāo)定技術(shù)研究的熱點(diǎn)之一。
提高慣導(dǎo)系統(tǒng)標(biāo)定精度和縮短標(biāo)定時(shí)間是標(biāo)定技術(shù)主要的研究方向,但兩者是相互矛盾的。對(duì)標(biāo)定數(shù)據(jù)的重復(fù)利用是提高標(biāo)定精度和縮短標(biāo)定時(shí)間的重要途徑。2007年,嚴(yán)恭敏等提出了一種基于逆向?qū)Ш剿惴ǖ慕萋?lián)慣導(dǎo)系統(tǒng)動(dòng)基座對(duì)準(zhǔn)方法,利用逆向?qū)Ш剿惴▽?shí)現(xiàn)了對(duì)準(zhǔn)數(shù)據(jù)的重復(fù)利用,縮短了對(duì)準(zhǔn)時(shí)間[3]。2014年,李京書等針對(duì)文獻(xiàn)[3]逆向?qū)Ш剿惴ㄖ羞M(jìn)行小角度近似,在對(duì)同一組數(shù)據(jù)多次處理時(shí)會(huì)引起誤差放大的問題,嚴(yán)格推導(dǎo)了逆向?qū)Ш剿惴ǎ苊饬硕啻蔚斐傻恼`差放大[4]。本文參考逆向?qū)Ш剿惴ㄔ趯?duì)準(zhǔn)中的應(yīng)用,結(jié)合雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)自標(biāo)定的特點(diǎn),提出了一種基于逆向?qū)Ш降碾p軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)自標(biāo)定方法,在不增加標(biāo)定轉(zhuǎn)位和數(shù)據(jù)采集時(shí)間的情況下,對(duì)一組標(biāo)定數(shù)據(jù)進(jìn)行連續(xù)充分挖掘,提高數(shù)據(jù)的利用率,從而實(shí)現(xiàn)雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)的高精度自標(biāo)定。
1 雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)標(biāo)定基本原理
定義坐標(biāo)系如下:記地心慣性坐標(biāo)系為i系;記地球坐標(biāo)系為e系;選取北天東地理坐標(biāo)系為導(dǎo)航坐標(biāo)系,記為n系;選取前上右坐標(biāo)系為慣導(dǎo)坐標(biāo)系(或載體坐標(biāo)系),記為b系。
1.1 系統(tǒng)誤差方程
根據(jù)慣性導(dǎo)航算法基本原理,直接給出在導(dǎo)航坐標(biāo)系下雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)速度和失準(zhǔn)角誤差方程分別如下[5]:
(1)

根據(jù)文獻(xiàn)[6],建立陀螺和加表誤差模型:
(2)
(3)

1.2 Kalman濾波器設(shè)計(jì)
以姿態(tài)角誤差、速度誤差、陀螺和加速度計(jì)零偏、陀螺和加速度計(jì)標(biāo)度因數(shù)誤差、安裝誤差為狀態(tài)變量,以速度誤差為觀測(cè)量建立狀態(tài)方程如下:
Z=HX+υ
(4)
式中,系統(tǒng)狀態(tài)量為
Z=[δVnδVuδVe]T
(6)
狀態(tài)量中的陀螺漂移、加表零偏、加表二次項(xiàng)誤差、陀螺和加表的標(biāo)度因數(shù)誤差和安裝誤差均可看作隨機(jī)常值誤差項(xiàng)進(jìn)行處理,微分均為零[7-8]。其余狀態(tài)量對(duì)應(yīng)的系統(tǒng)矩陣表達(dá)式由誤差方程給出。
采用標(biāo)準(zhǔn)Kalman濾波方程:
Pk=(I-KkHk)Pk/k-1
(7)
利用上述Kalman濾波器,通過設(shè)計(jì)合理的轉(zhuǎn)動(dòng)方案對(duì)24個(gè)誤差參數(shù)進(jìn)行激勵(lì),可以實(shí)現(xiàn)慣導(dǎo)系統(tǒng)的標(biāo)定。
2 基于逆向?qū)Ш降臉?biāo)定方法
為了提高標(biāo)定精度,需要對(duì)標(biāo)定數(shù)據(jù)進(jìn)行深入挖掘,本文提出的基于逆向?qū)Ш降淖詷?biāo)定方法,可以實(shí)現(xiàn)數(shù)據(jù)正向和逆向處理之間的轉(zhuǎn)換,對(duì)標(biāo)定數(shù)據(jù)進(jìn)行不間斷的正、逆向處理,同時(shí)進(jìn)行系統(tǒng)誤差參數(shù)辨識(shí),即實(shí)現(xiàn)了不間斷迭代運(yùn)算;并且可以利用粗對(duì)準(zhǔn)階段的數(shù)據(jù)進(jìn)行誤差辨識(shí),進(jìn)一步提高了數(shù)據(jù)的利用率。本節(jié)根據(jù)正向?qū)Ш剿惴ǎY(jié)合逆向?qū)Ш竭^程的特點(diǎn),推導(dǎo)了逆向?qū)Ш剿惴ǎo出了基于逆向?qū)Ш降淖詷?biāo)定方法。
2.1 正向?qū)Ш剿惴?/h3>
雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)的姿態(tài)、速度和位置導(dǎo)航算法可用如下一組微分方程表示[3]:
(8)
(9)
計(jì)算機(jī)實(shí)際解算時(shí),需要將式(8)離散化為[9]:
(10)
(11)
(12)
其中,Tn表示導(dǎo)航解算周期,P表示位置。
2.2 逆向?qū)Ш剿惴ㄍ茖?dǎo)
逆向?qū)Ш剿惴ㄊ菍?duì)導(dǎo)航數(shù)據(jù)按時(shí)間逆序求解,過程恰好與正向?qū)Ш浇馑阆喾碵10]。
首先對(duì)姿態(tài)更新算法取反
(13)
(14)

然后,對(duì)速度和位置更新算法取反
(15)

(16)
最后,可得位置更新方程
(17)
2.3 基于逆向?qū)Ш降淖詷?biāo)定方法
根據(jù)慣導(dǎo)系統(tǒng)誤差模型,選取式(5)中提到的24個(gè)誤差參數(shù)作為標(biāo)定參數(shù),為保證所有誤差參數(shù)均具有可觀測(cè)性,標(biāo)定路徑采用19位置標(biāo)定路徑[11]。具體標(biāo)定流程如下。
首先,控制旋轉(zhuǎn)機(jī)構(gòu)按照19位置標(biāo)定路徑依次轉(zhuǎn)動(dòng),每個(gè)位置停留一定時(shí)間,利用1.2節(jié)設(shè)計(jì)的Kalman濾波器對(duì)系統(tǒng)參數(shù)誤差進(jìn)行辨識(shí),同時(shí)將標(biāo)定起始時(shí)刻ts到結(jié)束時(shí)刻te的陀螺和加速度計(jì)采樣數(shù)據(jù)存儲(chǔ)下來(lái)[3];當(dāng)正向?qū)Ш健V波完成后,以te時(shí)刻速度、位置、姿態(tài)信息為初始條件,利用逆向?qū)Ш剿惴ǎ瑢?shí)現(xiàn)從te到ts時(shí)刻的逆向?qū)Ш剑瑫r(shí)繼續(xù)進(jìn)行Kalman濾波運(yùn)算;如此往復(fù),直到標(biāo)定參數(shù)變化滿足迭代截止條件,從而提高標(biāo)定精度。
3 仿真驗(yàn)證
為了驗(yàn)證標(biāo)定方法的可行性,設(shè)計(jì)、搭建了數(shù)學(xué)仿真平臺(tái)。采用數(shù)據(jù)發(fā)生器模擬生成標(biāo)定轉(zhuǎn)位運(yùn)動(dòng)軌跡數(shù)據(jù),輸出陀螺和加速度計(jì)的采樣值作為標(biāo)定仿真程序的輸入,進(jìn)行正、逆向?qū)Ш浇馑愫蚄alman濾波,辨識(shí)24個(gè)誤差參數(shù)。
3.1 數(shù)據(jù)發(fā)生器設(shè)置
數(shù)據(jù)發(fā)生器參數(shù)設(shè)置如下。
1)常值參數(shù)設(shè)置如表1所示。

表1 常值參數(shù)
2)誤差參數(shù)設(shè)置如表2所示。
3.2 標(biāo)定仿真結(jié)果分析
利用數(shù)據(jù)發(fā)生器生成的陀螺和加速度計(jì)采樣值進(jìn)行仿真,得到誤差參數(shù)估計(jì)殘差如表3所示,其中迭代次數(shù)定義為:第1次正向?qū)Ш綖V波作為第0次迭代,其后每進(jìn)行一次正向?qū)Ш綖V波或逆向?qū)Ш綖V波,迭代次數(shù)加1。
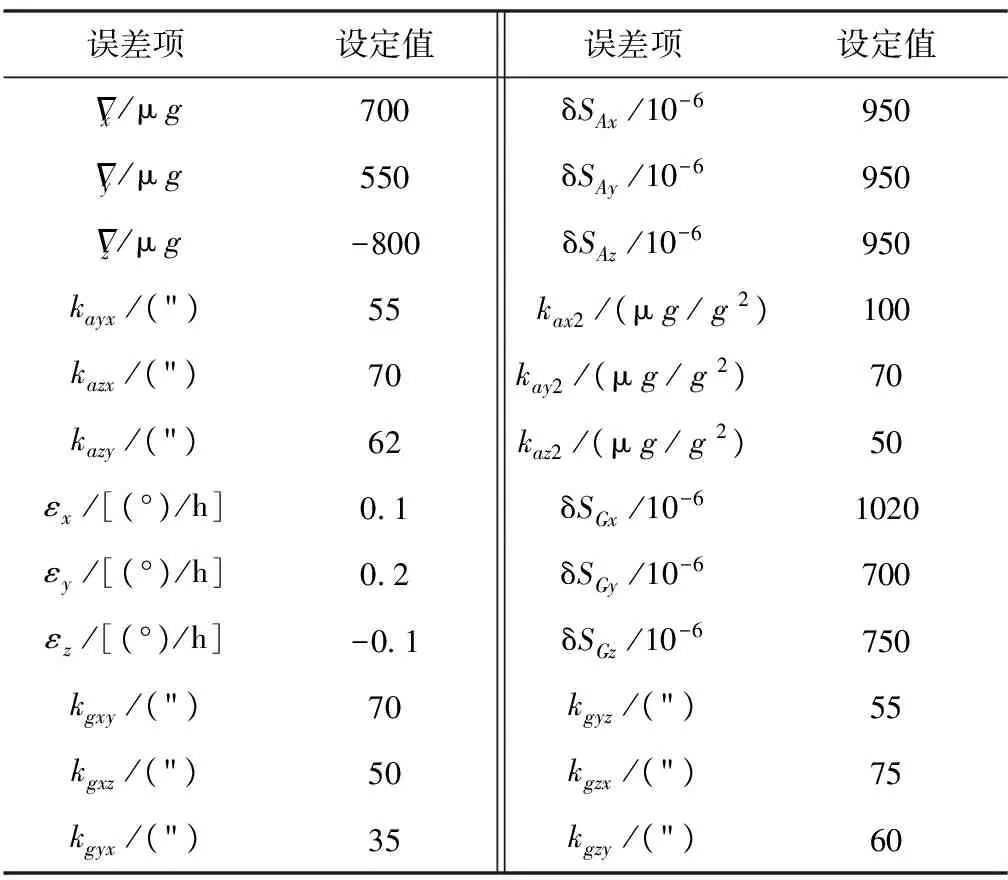
表2 誤差參數(shù)設(shè)定值
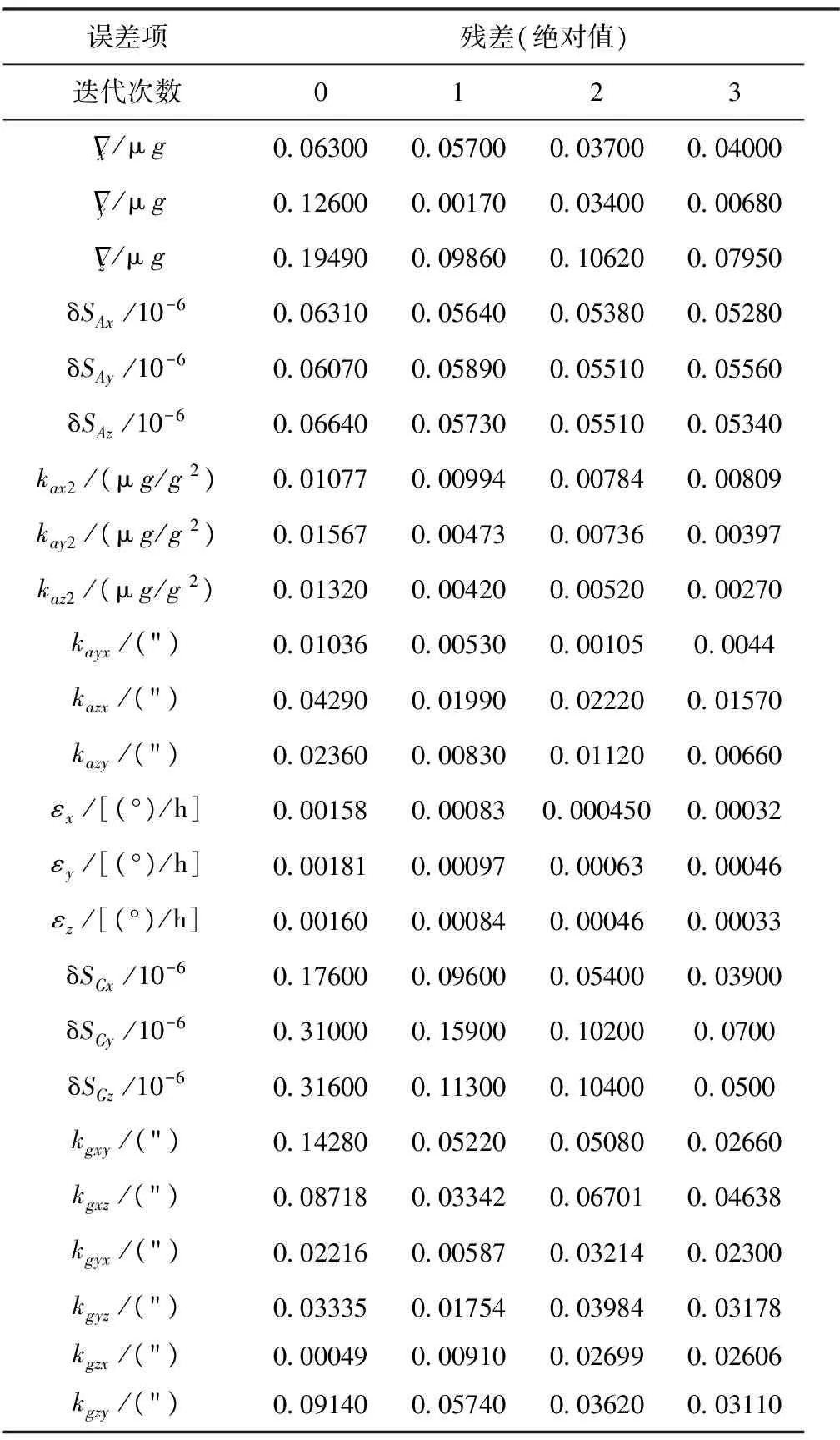
表3 誤差參數(shù)估計(jì)殘差
由表3可見,隨著迭代次數(shù)的增加,各誤差參數(shù)的估計(jì)殘差均有不同程度的減小。
選取陀螺漂移和標(biāo)度因數(shù)畫出濾波估計(jì)曲線如圖1、圖2所示,可以直觀地看出隨著正、逆向?qū)Ш綖V波次數(shù)增加,陀螺漂移估計(jì)值逐漸接近設(shè)定值。
4 導(dǎo)航試驗(yàn)驗(yàn)證
為進(jìn)一步驗(yàn)證標(biāo)定方法的可行性,利用某型雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng),采用標(biāo)定補(bǔ)償前、后的系統(tǒng)參數(shù)進(jìn)行1.5h靜態(tài)導(dǎo)航試驗(yàn),純慣性定位精度如圖3所示,對(duì)比可見,標(biāo)定補(bǔ)償后定位精度提高31%,表明本文所述標(biāo)定方法能有效提高標(biāo)定精度。
5 結(jié)論
本文提出了一種基于逆向?qū)Ш剿惴ǖ碾p軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)自標(biāo)定方法,給出了慣導(dǎo)系統(tǒng)誤差方程,詳細(xì)推導(dǎo)了逆向?qū)Ш剿惴ǎO(shè)計(jì)了基于逆向?qū)Ш剿惴ǖ淖詷?biāo)定方法,并搭建了數(shù)學(xué)仿真平臺(tái)。對(duì)標(biāo)定方法進(jìn)行仿真驗(yàn)證,結(jié)果表明與單次導(dǎo)航濾波相比,經(jīng)過幾次正、逆向?qū)Ш綖V波后標(biāo)定精度明顯提高。
利用某型雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng),對(duì)所提標(biāo)定方法進(jìn)行了試驗(yàn)驗(yàn)證,結(jié)果表明采用本文標(biāo)定方法得到的參數(shù)標(biāo)定結(jié)果進(jìn)行導(dǎo)航解算,定位精度有明顯提高。利用本標(biāo)定方法可以實(shí)現(xiàn)雙軸旋轉(zhuǎn)慣導(dǎo)系統(tǒng)的高精度自標(biāo)定,提高慣導(dǎo)系統(tǒng)的可維護(hù)性、延長(zhǎng)返廠維護(hù)周期,從而提高導(dǎo)航精度、延長(zhǎng)載體的值班時(shí)間,因此該標(biāo)定方法具有較高的工程應(yīng)用價(jià)值。
[1]唐匯河, 胡平華, 黃鶴,等. 基于低精度離心機(jī)的平臺(tái)慣導(dǎo)系統(tǒng)加速度計(jì)高精度系統(tǒng)級(jí)標(biāo)定方法[J]. 導(dǎo)航定位與授時(shí), 2016, 3(5):5-10.
[2]黃湘遠(yuǎn), 湯霞清, 武萌,等. 外場(chǎng)條件下戰(zhàn)車捷聯(lián)慣導(dǎo)系統(tǒng)原位快速多位置標(biāo)定技術(shù)[J]. 火炮發(fā)射與控制學(xué)報(bào), 2014,35(1):65-70.
[3]嚴(yán)恭敏,嚴(yán)衛(wèi)生,徐德民.逆向?qū)Ш剿惴捌湓诮萋?lián)羅經(jīng)初始對(duì)準(zhǔn)中的應(yīng)用[C]// 第27屆中國(guó)控制會(huì)議.昆明, 2008:72.
[4]李京書, 許江寧, 何泓洋,等. 嚴(yán)格逆向過程的羅經(jīng)回溯對(duì)準(zhǔn)方法[J]. 系統(tǒng)工程與電子技術(shù), 2014, 36(2):348-353.
[5]秦永元.慣性導(dǎo)航(第二版)[M]. 北京:科學(xué)出版社, 2005: 355-361.
[6]雷宏杰, 王曉斌, 劉放. 機(jī)載雙軸旋轉(zhuǎn)調(diào)制激光慣性導(dǎo)航系統(tǒng)誤差特性及關(guān)鍵技術(shù)分析[J]. 導(dǎo)航定位與授時(shí), 2016, 3(4):13-18.
[7]Chung D, Lee J G, Chan G P, et al. Strapdown INS error model for multiposition alignment[J]. IEEE Transactions on Aerospace & Electronic Systems, 1996, 32(4):1362-1366.
[8]Weinberg M S, Kourepenis A. Error sources in in-plane silicon tuning-fork MEMS gyroscopes[J]. Journal of Microelectromechanical Systems, 2006, 15(3):479-491.
[9]孫進(jìn), 徐曉蘇, 劉義亭,等. 基于逆向?qū)Ш浇馑愫蛿?shù)據(jù)融合的SINS傳遞對(duì)準(zhǔn)方法[J]. 中國(guó)慣性技術(shù)學(xué)報(bào), 2015, 23(6):727-732.
[10]邱宏波, 周東靈, 李文耀,等. 基于閉環(huán)誤差控制器的高精度POS后處理算法[J]. 中國(guó)慣性技術(shù)學(xué)報(bào), 2010, 18(6):691-695.
[11]劉永紅, 劉明雍, 謝波,等. 雙軸旋轉(zhuǎn)激光捷聯(lián)慣導(dǎo)系統(tǒng)在線標(biāo)定技術(shù)[J]. 魚雷技術(shù), 2015, 23(3):218-221.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
