空地導彈復合制導模式設計及仿真技術研究
2018-04-09 07:45:48楊凱盧鶯
航空兵器 2018年1期
楊凱 盧鶯
摘 要:?????? 本文介紹了典型多模復合制導空地導彈的制導模式設計, 對復合導引頭的結構組成、 工作原理、 制導信息融合技術、 制導信息過渡銜接切換技術、 制導信息智能補償技術作了闡述。 最后, 闡述了雙模復合制導半實物仿真系統設計方案及典型雙模復合制導半實物仿真系統組成原理及工作方式。
關鍵詞:????? 多模復合制導; 信息融合; 導引頭; 仿真系統
中圖分類號:???? TJ765.3 文獻標識碼:???? A? 文章編號:???? ?1673-5048(2018)01-0020-07
0 引? 言
隨著現代社會智能化、 網絡化、 信息化技術的發展, 光電干擾技術、 隱身技術和反輻射導彈技術在軍事上得到應用, 單一制導體制的武器裝備受到日益嚴重的電子戰挑戰, 其固有弱點和局限性大大降低了制導武器系統的作戰效能, 甚至難以適應未來復雜、 惡劣的戰場環境,? 這就促使武器制導體制由單模導引向多模導引發展。 多模復合制導方式成為必然選擇, 其優勢在于, 可充分發揮各頻段或各制導體制的特長, 相互彌補, 極大地提高武器系統的抗干擾能力和作戰效能, 已經成為精確制導武器實現全自動化和智能化的主要技術途徑, 引起了各國的廣泛重視。
目前國外正在研制采用毫米波/激光半主動、 毫米波/紅外成像、 毫米波/激光半主動/紅外成像等多模復合制導體制的空地導彈。 最典型的多模復合制導空地導彈有英國研制的“雙模硫磺石”(DMB)導彈, 其采用毫米波/激光半主動雙模制導體制, 以及美國研制的聯合空地導彈(JAGM), 其采用毫米波/激光半主動/紅外成像三模制導體制。
1 多模復合制導空地導彈制導模式設計
多模復合制導空地導彈能夠適應全地域、 全天時、 復雜氣象及電磁環境條件下的作戰使用要求, 武器系統采用火控雷達、 晝夜觀瞄系統、 綜合通訊系統進行目標定位, 由載機在敵低空火力區域外發射空地導彈, 精確攻擊防空單元、 主戰坦克、 野戰指揮車等高價值目標, 還可用于攻擊其他重要技術兵器, 如步兵戰車、 裝甲運兵車和小型艦船等地(水)面目標。 采用多模復合制導的空地導彈普遍具有以下特點:? (1)遠距離攻擊能力; (2)精確制導能力; (3)發射后不管能力; (4)全天候攻擊能力; (5)多目標攻擊能力。
對于毫米波/激光半主動/紅外成像三模制導的空地導彈, 主要設計如下五種制導模式:
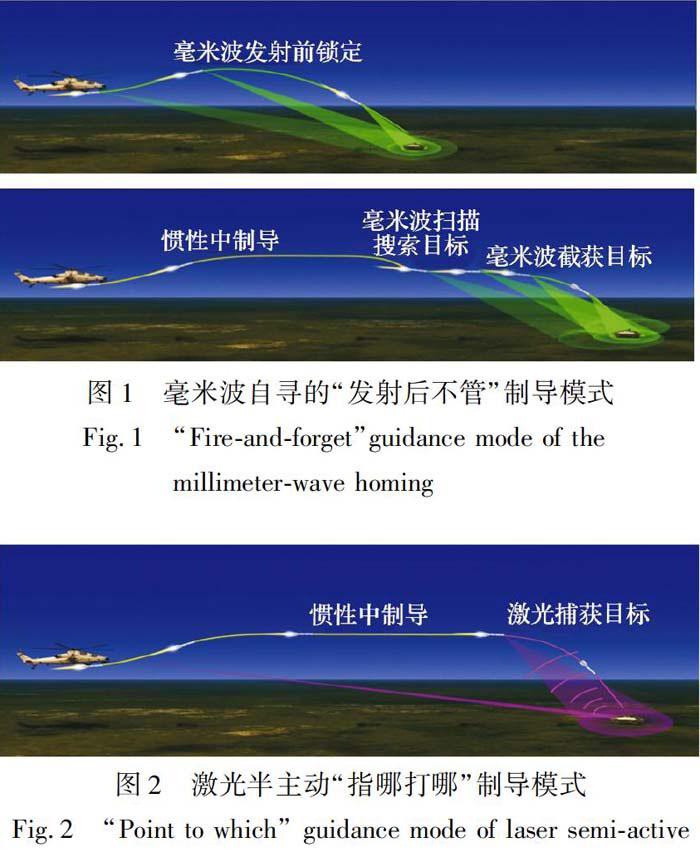
(1) 毫米波自尋的“發射后不管”制導模式, 見圖1。
導引頭毫米波模式工作, 自主截獲和跟蹤目標, 載機發射導彈后即可撤離, 可完全實現“發射后不管”。
(2) 激光半主動“指哪打哪”制導模式,見圖2。 使用本機或非本機激光指示目標, 導引頭激光半主動模式工作, 利用激光模式“指哪打哪”的特點, 實現對多種地面目標的精確打擊。
(3) 激光毫米波“復合接力”制導模式, 如圖3所示。
首先使用導引頭激光半主動模式, 為導引頭毫米波模式提供初始指向, 提升目標捕獲與識別概率, 當導引頭毫米波模式捕獲目標后, 使用毫米波信息進行末制導, 實現激光毫米波“復合接力”制導模式。
(4) 紅外成像自尋的“發射后不管”制導模式, 如圖4所示。
使用導引頭紅外成像模式, 攻擊近距離靜止或運動目標, 可采用“發射前鎖定”攻擊方式, 實現“發射后不管”; 攻擊遠距離較簡單背景下的特定固定目標時, 可采用“發射后鎖定”攻擊方式, 也可實現“發射后不管”。
(5) 激光與紅外成像“復合接力”制導模式, 如圖5所示。 首先使用導引頭激光半主動模式, 將導引頭光軸引導到待攻擊目標點附近, 再進入紅外圖像可探測距離內, 轉入紅外圖像模式制導, 實現激光與紅外成像“復合接力”制導模式。
2 毫米波/激光半主動/紅外成像三模導引頭方案設計
毫米波/激光半主動/紅外成像三模復合導引頭各分系統采用共用穩定平臺位標器系統的共口面復合方案, 導引頭由以下部分組成:? (1) 主動毫米波探測系統; (2) 四象限激光探測系統; (3) 凝視紅外焦平面成像探測系統; (4) 穩定平臺位標器及控制系統; (5) 信息融合處理器; (6) 多波段頭罩。 導引頭結構及系統組成見圖6~7。
毫米波分系統采用平板陣列單脈沖天線、 毫米波收發模塊、 頻率源、 信號源、 雙通道中頻接收機和信號處理器; 激光探測系統與激光照射器協調工作, 采用四象限激光探測器, 接收和識別約定碼型的激光回波信號, 可穩定跟蹤目標; 紅外探測系統采用制冷凝視紅外焦平面成像, 提高對地目標的探測距離與識別能力。
激光半主動/紅外成像探測系統采用共光路設計, 紅外探測系統與激光探測系統共用一個通道, 通過分光板將紅外與激光信號在通道后端分開, 分別送入相應探測器進行后續處理。
位標器采用速率陀螺穩定平臺技術方案, 毫米波探測器、 紅外探測器和激光探測器安裝在同一個位標器上, 且光軸、 電軸、 機械軸重合。
復合導引頭信息處理硬件平臺接收不同波段傳感器的輸出信息, 按照基于特征層的決策層信息融合策略, 開展多傳感器信息處理及融合, 確定目標相對導引頭的角偏差信息, 將控制指令輸出到導引頭控制回路, 經放大轉換后, 作用在導引頭平臺框架力矩器, 力矩器輸出力矩驅動外框及內框, 平臺實現兩個方向的運動, 從而完成對目標的實時跟蹤。
3 毫米波/激光半主動/紅外成像三模導引頭工作原理及信息融合處理方法
使用三模導引頭對目標進行探測、 識別和跟蹤, 主要目的在于多種傳感器進行互補以便得到更多的目標信息。? 三模復合制導的空地導彈采用比例導引規律進行末制導, 因此, 本文主要從制導控制大系統角度針對導引頭測量得到的彈目距離、 彈目視線角速度等信息進行信息融合算法設計, 而不是針對目標本身特征信息(如目標成像特性、 目標起伏噪聲等)進行相關信息融合算法設計。 同時, 結合相關工程應用介紹了不同制導信號之間的過渡銜接技術、 制導信息智能補償技術。
3.1 制導信息融合技術
復合制導信息融合技術是指利用計算機技術, 對復合導引頭工作在不同制導模式下按時間順序觀測得到的目標信息, 在一定的準則下加以自動分析、 綜合, 從而形成決策級融合制導信息的先進技術。 信息融合有數據層融合、 特征級融合和決策級融合三類。 復合導引頭制導信息融合采用基于特征層的信息融合策略。 信息融合的一般步驟分: (1) 數據預處理, 包括空間對準、 時間對準、 野值處理等; (2) 數據關聯, 采用的算法包括最近鄰域算法、 K鄰域算法、 加權統計距離檢驗法、 概率數據關聯算法、 基于灰色關聯的概率數據關聯算法等; (3) 信息融合, 采用的算法包括Bayes推理法、 表決法、 D-S推理法、 神經網絡融合法等。
信息融合一般分為集中式信息融合和分布式信息融合。 集中式處理能夠得到最優的處理結果, 但是對數據預處理的要求較高, 分布式處理較為靈活。
3.1.1 集中式信息融合方案
設三模導引頭中, 激光制導模式輸出信息為X1(k1, …, kn), 紅外制導模式輸出信息為X2(k1, …, kn), 毫米波制導模式輸出信息為X3(k1, …, kn), 采取集中式信息融合的結構如圖8所示。
3.1.2 分布式信息融合方案
設三模導引頭中, 激光制導模式輸出信息為X1(k1, …, kn), 紅外制導模式輸出信息為X2(k1, …, kn), 毫米波制導模式輸出信息為X3(k1, …, kn), 采取分布式信息融合的結構如圖9所示。
3.2 制導信息過渡銜接切換技術
以激光毫米波“復合接力”制導模式為例, 說明多模復合制導接力及制導信息過渡銜接切換技
術, 導引頭接收制導控制計算機“解鎖”指令, 導引頭解鎖并按給定掃描規律首先進行激光回波搜索, 捕獲并跟蹤激光回波信號, 此時導引頭由激光回路控制跟蹤目標。 毫米波雷達隨“解鎖”指令開機, 探測雷達回波信號, 捕獲目標回波信息后, 導引頭進行目標確認并根據切換條件判斷是否切換跟蹤狀態; 滿足條件后切換為毫米波跟蹤, 此時導引頭由毫米波回路控制跟蹤目標。 制導信息由激光制導信息過渡銜接到毫米波制導信息, 切換到毫米波雷達跟蹤后, 若出現目標丟失, 不再切換回激光搜索目標, 導引頭按制導控制計算機給定掃描規律利用毫米波雷達重新搜索目標, 如果不能再次截獲目標, 則制導信息切換為理論視線角速度信息。 空地導彈末制導段制導信息過渡銜接、 切換以及智能補償傳遞流程如圖10所示。
理論視線角速度信號計算方法如下:
3.3 制導信息智能補償技術
導彈在末制導段飛行過程中, 由于目標姿態突然變化、 目標閃爍以及其他諸多因素的干擾, 都可能引起導引頭輸出不穩定, 經制導信息融合后, 仍可能出現導引頭輸出信息跟蹤目標時出現短暫丟失或頻繁丟失等不穩定跟蹤現象。 當導引頭穩定跟蹤目標時, 設截獲狀態位D0為1, 導引頭輸出視線角速度穩定;? 當導引頭丟失目標時, 設截獲狀態位D0為0, 導引頭輸出視線角速度為0。 導引頭截獲狀態位D0與導引頭輸出視線角速度的關系曲線見圖13。 如果制導控制系統采用此視線角速度信號對導彈進行末段比例導引控制, 將會導致導彈飛行姿態擺動, 進而影響命中精度。 在此可能引起導引頭輸出不穩定, 經制導信息融合后,仍可能出現導引頭輸出信息跟蹤目標時出現短暫丟失或頻繁丟失等不穩定跟蹤現象。 當導引頭穩定跟蹤目標時, 設截獲狀態位D0為1, 導引頭輸出視線角速度穩定;? 當導引頭丟失目標時, 設截獲狀態位D0為0, 導引頭輸出視線角速度為0。 導引頭截獲狀態位D0與導引頭輸出視線角速度的關系曲線如圖13所示。 如果制導控制系統采用此視線角速度信號對導彈進行末段比例導引控制, 將會導致導彈飛行姿態擺動, 進而影響命中精度。 在此導引頭輸出的視線角速度信號作用下, 導彈的飛行姿態曲線如圖14所示。
為了解決導引頭跟蹤目標不穩定時輸出視線角速度信號跳零, 導致導彈姿態擺動、 命中精度降低的問題, 制導控制系統采用導引頭輸出視線角速度信號智能補償技術, 對導引頭輸出視線角速度信號進行處理, 處理結果如圖15所示。 采用智
能補償技術處理后的視線角速度平滑, 接近真實視線角速度輸出。 通過智能補償技術處理后的視線角速度信號進行末段比例導引控制, 姿態角擺動現象明顯得到抑制, 且能夠保證導彈命中精度。 姿態角仿真結果如圖16所示。
4 多模復合制導系統仿真技術
4.1 雙模復合制導半實物仿真方案研究與設計
為驗證雙模復合制導控制系統的方案設計, 需要進行半實物仿真驗證。 雙模復合制導半實物仿真系統設計主要包括系統建模與驗模、 軟件設計、 系統連接和環境支持仿真技術、 半實物仿真試驗方案設計等。
搭建雙模復合制導半實物仿真系統首先需要建立系統仿真模型并檢驗其正確性。 雙模復合制導控制系統半實物仿真建模主要包括彈體空間六自由度數學模型、 導彈-目標相對運動學模型、 制導控制部件模型、 自動駕駛儀數學模型、 干擾噪聲模型和系統誤差模型等。
仿真系統軟件設計包括模型程序設計、 服務程序設計和系統集成程序設計。 通過對彈體飛行運動學、 動力學特性的分析, 按照“構件”組裝原理, 依據通用、 可剪裁拆裝的要求進行模塊化設計, 并通過對控制系統結構、 組成和傳遞函數的分析, 按設備組成單元對模型程序進行模塊化設計。 設計支持仿真系統構成的功能軟件模塊, 包括原始數據處理模塊、 I/O連接模塊、 剪裁控制模塊等; 設計支持仿真系統運行監控的功能軟件模塊, 包括交互控制模塊、 結果數據處理模塊、 參數顯示模塊、 數據辨識和分析模塊、 運行監測模塊等; 各種算法程序的設計, 包括數值積分算法程序、 數據處理算法程序, 函數生成算法程序等。 系統集成程序的功能是按照系統組成原理的要求, 將系統“構件”組裝成可以控制、 可以測試、 可以運行的仿真試驗系統。
半實物仿真試驗系統由參試部件、 仿真模型、 仿真設備及各種接口裝置等組成。 其中仿真設備包括仿真計算機, 角運動仿真設備, 各種單軸、 三軸轉臺, 角速度仿真設備, 各種加速率轉臺, 線加速度仿真設備以及伺服機構負載仿真設備等。 各種接口裝置為A/D, D/A, D/D, TTL接口及專用接口等。
針對雙模復合制導半實物仿真試驗, 需要研究制定相應的試驗方案, 主要包括數字仿真試驗方案、 半實物仿真試驗方案、 程控仿真試驗方案、 閉環仿真試驗方案等。 試驗方案的設計依據有: 考核制導控制系統設計的正確性; 考核彈載計算機實現數學模型的正確性; 考核各制導控制部件工作的協調性、 可靠性及接口的匹配性; 考核命中精度、 抗干擾能力、 邊界條件、 載機發射條件等技術指標。 同時, 半實物仿真系統的設計方案要涵蓋雙模復合制導系統的各種工作模式, 為雙模復合導引頭提供不同的目標模擬系統。
4.2 典型雙模復合制導半實物仿真系統
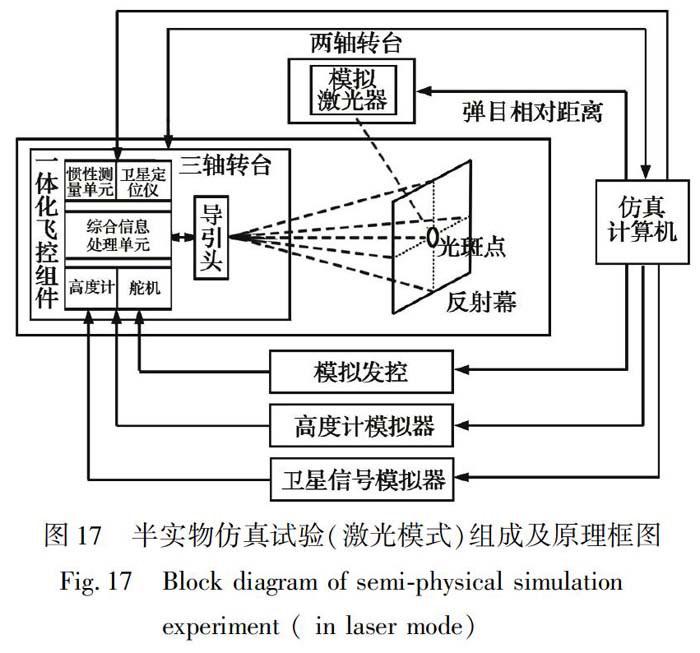
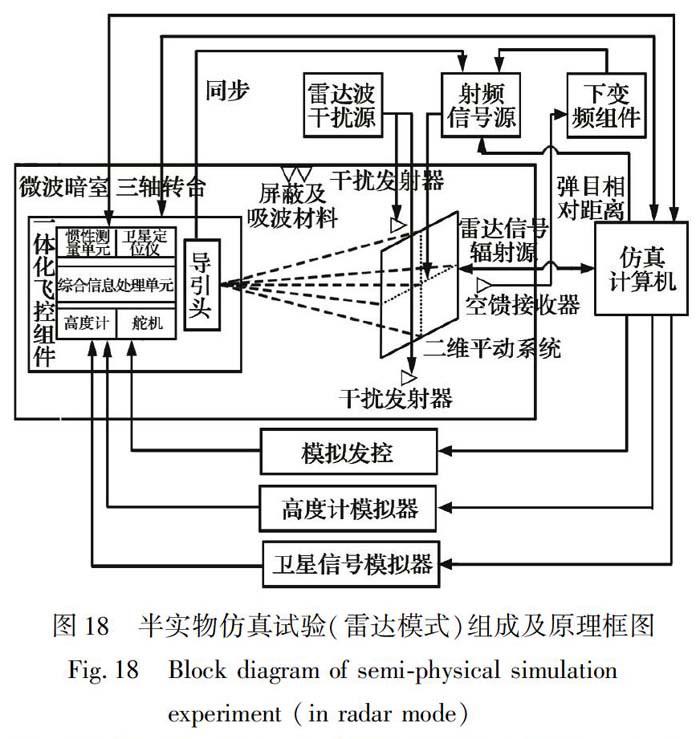
某空地導彈采用激光/毫米波復合導引頭尋的制導, 具有“發射前鎖定”和“發射后鎖定”攻擊方式。 (1)發射前鎖定攻擊: 導彈上電自檢正常后, 地面照射器啟動激光照射, 射手置“發射前鎖定”, 導引頭解鎖掃描, 當捕獲到激光回波后, 轉入跟蹤狀態, 系統提示“鎖定好”, 射手按下發射按鈕, 導彈發射離軌, 導引頭繼續跟蹤激光信號, 到達預定時刻, 導引頭轉入毫米波跟蹤, 導彈按照比例導引彈道飛行, 直至命中目標。 (2)發射后鎖定攻擊: 導彈上電自檢正常后, 射手按下發射按鈕, 導彈發射離軌, 地面照射器按照時序啟動激光照射, 導彈按照預定中制導控制程序飛行, 導引頭按照預定時序解鎖、 掃描, 當捕獲到目標的激光回波后, 轉入跟蹤狀態, 到達預定時刻, 導引頭轉入毫米波跟蹤, 導彈按照比例導引彈道飛行, 直至命中目標。 復合制導半實物仿真系統框圖如圖17~18所示。
5 結? 論
為了解決單一制導體制的局限性, 目前各國正在紛紛研制采用多模導引頭的復合制導體制。 本文介紹的五種復合制導模式, 利用各制導模式的優點, 取長補短, 充分發揮武器系統的最優性能。 復合制導信息融合可采用集中式信息融合和分布式信息融合方案, 集中式信息融合能夠得到最優的處理結果, 但是對數據預處理的要求較高, 分布式信息融合較為靈活。 文中還提出了制導信息過渡銜接切換技術、 制導信息智能補償技術, 這兩種技術方案應用于多模導引頭制導信息過渡銜接切換、 數據異常或融合信息難以滿足制導精度需求時, 對比例導引段控制系統有良好的改善作用, 姿態異常擺動現象得到抑制, 控制品質明顯提升。
參考文獻:
[1] 王軍, 谷良賢, 王博, 等.毫米波制導導彈系統誤差及捕獲概率研究[J].航空計算技術, 2012, 42(5): ?25-27.
Wang Jun,Gu Liangxian,Wang Bo,et al. Research on System Error Analysis and Acquisition Probability of MMW Guide Weapon[J].Aeronautical Computing Technique,2012, 42(5): 25-27.(in Chinese)
[2] 馬菲, 馬清華, 楊凱, 等.毫米波導引頭預定回路改進單神經元控制[J]. 彈箭與制導學報, 2015,35(1): 41-44.
Ma Fei,Ma Qinghua,Yang Kai,et al. Improved Single Neural Control for the Predefined Circuit of the MMW Seeker[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2015, 35(1):? 41-44.(in Chinese)
[3] 劉源. 基于模糊信息處理的數據融合方法研究[D].西安:? 西安電子科技大學,1999.
Liu Yuan. Study of Data Fusion Methods Based on Fuzzy Information Processing[D]. Xian: Xidian University,1999.(in Chinese)
[4] 江源源. 多模復合制導信息融合技術研究[D].哈爾濱:? 哈爾濱工程大學, 2007.
Jiang Yuanyuan. Research on the Information Fusion Technology of Multi-Mode Guidance[D]. Harbin: Harbin Engineering University, 2007.(in Chinese)
[5] 何益民, 周軍.紅外/毫米波雙模制導數據融合方法[J].彈箭與制導學報,? 2008, 28(1): 75-78.
He Yimin,Zhou Jun. Methods of Data Fusion Based on IR/MMW Dual-Model Combined Guidance[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2008, 28(1):? 75-78.(in Chinese)
[6] 穆紅.防空導彈雷達導引頭設計[M].北京:? 宇航出版社, 1996.
Mu Hong. Design of Anti Air Missiles Radar Seeker[M]. Beijing:? Aerospace Press, 1996.(in Chinese)
[7] 沈遠香, 黃曉霞, 王永惠.國外多模復合制導技術[J].四川兵工學報, 2013, 34(10):? 29-31.
Shen Yuanxiang, Huang Xiaoxia, Wang Yonghui. The Foreign Multimode Compound Guidance Technology[J].Sichuan Ordnance Journal, 2013, 34(10):? 29-31.(in Chinese)
[8] 錢杏芳, 林瑞雄, 趙亞男.導彈飛行動力學[M].北京:? 北京理工大學出版社, 2012.
Qian Xingfang,Lin Ruixiong,Zhao Yanan. Missile Flight Mechanics[M].Beijing: Beijing Institute of Technology Press, 2012. (in Chinese)
[9] 劉興堂.精確制導、 控制與仿真技術[M].北京:? 國防工業出版社, 2006.
Liu Xingtang. Precision Guide & Control and Simulation Technology[M].Beijing:? National Defense Industry Press, 2006. (in Chinese)
[10] 張宏.增強型比例導引的理論與工程應用研究[D].北京:? 北京理工大學, 2007.
Zhang Hong. Study on Theory and Engineering Application of Augmented Proportional Navigation System[D]. Beijing: Beijing Institute of Technology, 2007. (in Chinese)
[11] 孫未蒙, 鄭志強.多約束條件下對地攻擊的最優制導律[J].兵工學報, 2008, 29(5):? 567-571.
Sun Weimeng,Zheng Zhiqiang. Optimal Guidance Law with Multiple Constraints in Ground Strike[J]. Acta Armamentarii, 2008, 29(5):? 567-571.(in Chinese)
[12] 夏群力, 祁載康, 王磊.閃爍輸入下比例導引系統無量綱化研究[J]. 系統仿真學報, 2007, 19(9):? 2015-2017.
Xia Qunli,Qi Zaikang,Wang Lei. Non-Dimensional-Normalization of PN System with Glint Input[J].Journal of System Simulation, 2007, 19(9):? 2015-2017.(in Chinese)
[13] Moon J, Kim K, Kim Y. Design of Missile Guidance Law via Variable Structure Control[J].Journal of Guidance, Control, and Dynamics, 2001, 24(4):?? 659-664.
[14]? Garnell P. Guided Weapon Control System[M].Second Revision by Qi Zaikang, Xia Qunli. Beijing: Beijing Institute of Technology Press, 2004:? 220-245.