用原創的DUCG人工智能技術提高核電站的安全性和可用度
2018-04-09 03:49:29張勤
中國核電 2018年1期
張 勤
(清華大學核能與新能源技術研究院,北京 100084)
核電機組的安全性是核電發展的基本前提,但其經濟性 (包括建造成本和可用度)也必須兼顧,否則核電將失去市場競爭力。當前,包括我國在內的世界各國正在大力研究和發展第三代、第四代新型先進核電機組。但這些先進機組卻不能改變已經在役的448臺機組 (含我國大陸的35臺)的現狀。此外,安全性也難以僅僅通過增加設施的冗余度和提高設備安全等級來提高,因為一方面受制于成本;另一方面任何設備都不可能100%可靠。事實上,共同原因失效和多個常規故障疊加以及人因失效往往是導致重大核事故的主因,而頻度較高的小故障和故障應對失當 (操作人員對故障的誤判、判斷不及時、措施不及時不精準等)以及基于狀態安全導向原則的粗放式的現有故障和事故操作規程等,即使不足以導致或能夠防止出現重大核事故,也會導致核電站的可用度降低 (特別是計劃外停堆),增加核電站的運行成本。
圖1所示為典型的壓水堆核電站系統示意圖,也是美國三哩島核電站的系統示意圖。其中4個圓圈為三哩島核事故中發生故障和虛假信號的部位。
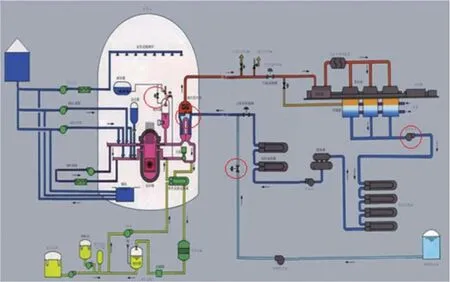
圖1 典型的壓水堆核電站系統圖及三哩島核事故故障點示意Fig.1 Illustration of the typical PWRNPP and the fault locations of the Three Mile Island nuclear accident
美國三哩島核事故的大體經過如下:二回路冷凝泵故障停轉,反應堆停堆,二回路輔助給水系統自動啟動,但輔助給水系統的隔離閥在定期檢修后忘了打開,輔助給水過不去,導致蒸汽發生器蒸干,一回路壓力上升,泄壓閥自動打開泄壓,但壓力降低后不能按照要求回座關閉,導致堆芯失水失壓,緊急注入系統自動啟動。此時穩壓器水位顯示為高,導致操作員誤判緊急注入系統誤啟動,遂手動將其關閉,致使堆芯裸露,釀成大禍。事后分析知一回路在泄壓閥不能關閉的情況下形成了一個小破口,一回路壓力降低,導致產生大量氣泡,推高了穩壓器水位。如果將穩壓器的水位高信號結合壓力低等信號進行組合推理,可知水位高是虛假信號,或操作員對水位高原因的理解有誤。總之,這些虛假信號或知識缺陷是可以通過信號組合分析推理來識別的[1-2]。但這種復雜的組合推理對于人類操作員來說非常困難,尤其是在面臨巨大的安全和經濟壓力的情況下。
三哩島核事故以及后來的切爾諾貝利核事故和福島核事故使人們進一步提高了對核電站安全性的要求,包括采用更為嚴格的以安全為導向的操作規程。例如事故半小時內不允許人干預反應堆系統、不得手動關閉緊急注入系統等。但這樣做的同時也喪失了早期干預故障、減小故障后果的機會,導致核電站運行成本增加,同時安全性也未必能夠顯著提高。為此,人們又想辦法改進核電站的設計,增加其固有安全性,也就是建造新一代核電機組。但新型核電機組也會因為大量采用新技術、新設備、新工藝而導致增加核電站的經濟性的不確定性。事實上,目前全世界在建的第三代或第四代先進核電機組建造成本都大大超出了預算。此外,新型核電機組對于改進在役核電站的安全性和可用度并無幫助。
人工智能技術既可用于新建核電站,也可用于在役核電站。難度小、投入少、見效快,是改進硬件和加強管理之外的另一條提高核電站安全性和可用度的有效途徑。自1979年美國三哩島核事故以來,人們已經為此進行了不懈的努力。但迄今尚未見到成功應用的報道。究其原因,主要是核電站故障工況下異常和正常的信號多、變化快、故障模式多樣復雜 (包括初因和非初因事件及其組合、不確定證據、虛假信號和負反饋工況等復雜情況)、故障重復性少、完全相同的機組少、可用于機器學習的故障數據少、要求推理速度快 (每秒鐘要完成數百甚至數千的信號和故障變量的組合推理計算)、要求推理結果可解釋性強等。而現有主流人工智能技術幾乎都是基于大數據機器學習的黑箱模型 (例如神經網絡NN、貝葉斯網絡BN、支持向量機SV M等),大型復雜工業系統 (包括核電站)領域既無可供計算機學習的大量故障數據,也難以接受黑箱模型的無可解釋性的推理結果。總之,基于大數據機器學習的黑箱人工智能模型很難在核電等大型復雜工業系統故障診斷領域得到有效應用。
為解決上述問題,經過數十年研究,本文作者提出了基于領域專家知識的動態不確定因果圖(Dyna mic Uncertain Causality Graph,DUCG)理論模型[3-9],并初步開發了基于DUCG的核電站實時故障監測、預報、診斷、發展預測和決策支持的軟件平臺 (含知識庫編輯器、推理機、人機界面、通信接口等),并針對嶺東核電站發電機、寧德核電站模擬機二回路 (含蒸汽發生器)、清華大學核電站模擬機 (已退役)二回路 (含蒸汽發生器)以及化工系統TE模擬器、衛星電源系統等工業系統進行了近百項實時故障實驗,迄今正確率達到100%。
此外,DUCG還具有知識庫全圖形表達、知識庫模塊化建造和自動合成、知識庫和推理結果可解釋性強、推理速度快、容錯能力強 (包括虛假信號和局部錯誤知識庫)、概率參數精度要求低、適用于負反饋等復雜動態工況、能診斷從未出現過的故障以及不確定證據推理、不完備知識庫推理、概率風險評價 (與基于常規事件樹和故障樹的PSA方法比較,DUCG能嚴謹處理隱藏于故障樹之間的相關性和邏輯循環)等功能。
1 DUCG應用實例簡介
1.1 蒸汽發生器U形管破裂
以清華大學核電模擬機為例,其二回路示意圖如圖2所示。

圖2 典型的壓水堆二回路示意圖Fig.2 Illustration of a typical secondary loop of a pressured water reactor
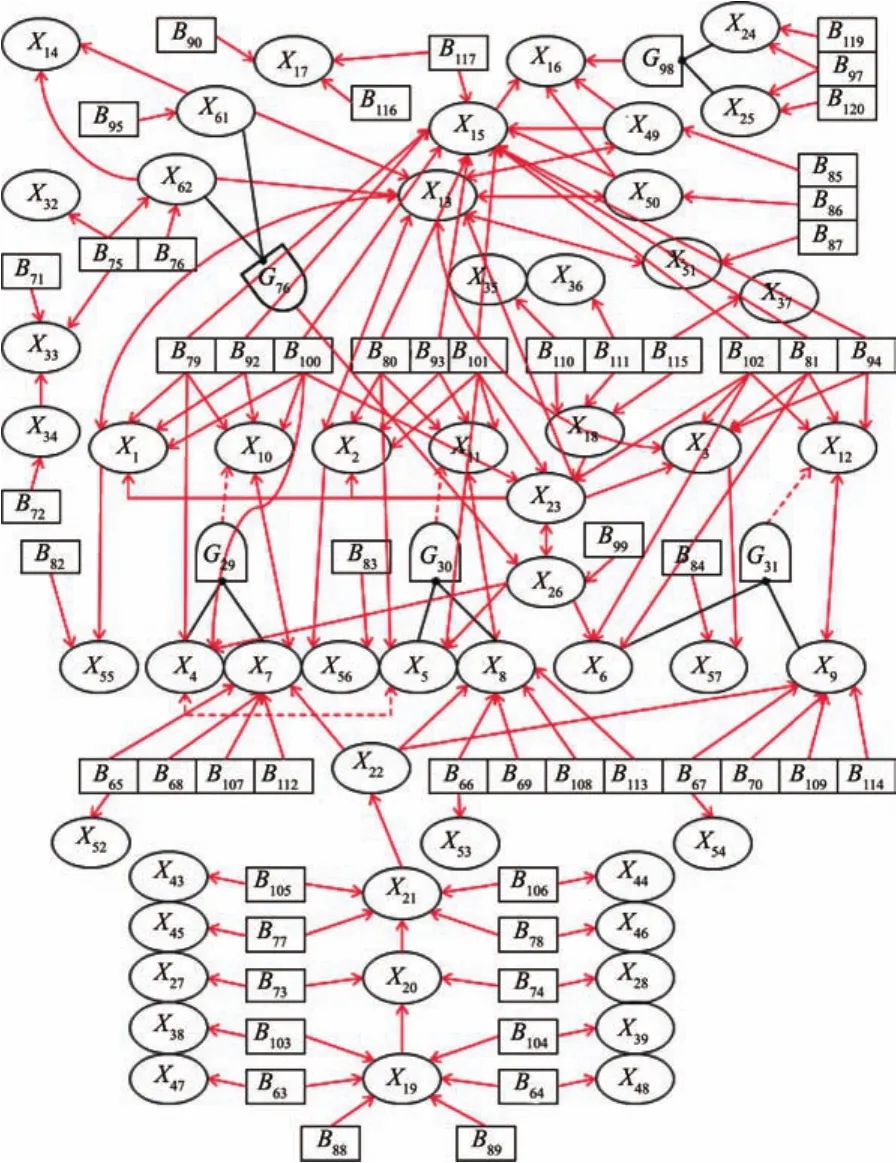
圖3 核電模擬機二回路主要故障診斷DUCG圖Fig.3 DUCGfault diagnosis for the secondary loop system of the NPPsimulator located at Tsinghua University
該系統的故障診斷DUCG知識庫如圖3所示。其中,矩形B變量代表可能的根原因故障或其組合、圓形X變量代表從DCS系統收到的信號變量、紅色有向弧代表變量間的因果關系 (每個有向弧是一個由原因變量的狀態與結果變量的狀態組合而成的矩陣,其中的概率參數代表原因導致結果出現的不確定性,通常為稀疏矩陣,即只表達異常狀態之間的確定或不確定因果關系)、邏輯門代表輸入變量的任意邏輯組合、虛線紅色有向弧代表條件因果關系 (在條件成立時因果關系成立)。注意有些變量互為因果關系。例如X23(二回路蒸汽溫度)和X26(反應堆功率)互為因果:溫度升高會導致功率降低 (負反饋),功率降低又會導致溫度降低(正反饋),溫度降低又會導致功率升高 (正反饋),即這兩個信號由于正反饋和負反饋形成的閉環導致信號隨時間動態振蕩。此外還有三個蒸汽管線及主蒸汽聯箱的壓力互為因果等。
設定模擬機故障為蒸汽發生器C中U型管破裂 (B102,1),收到的異常信號如圖4所示。
本例的DUCG動態診斷結果如圖5~圖9所示。其中的時間間隔并不是恒定的,而是根據收到新的異常信號而自動確定的。由于t1時刻已知可能的故障只有一個,其發生概率已確定為100%。
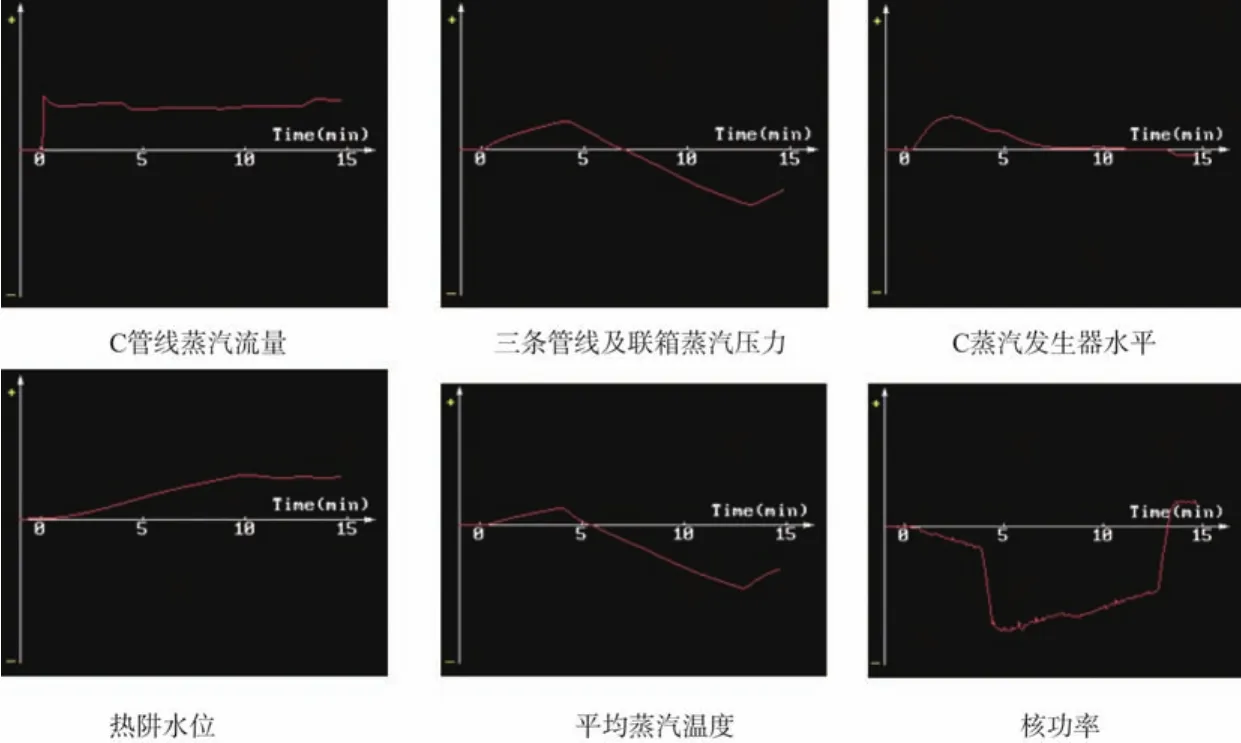
圖4 C蒸汽發生器U形管破裂故障異常信號Fig.4 Abnormal signals in the case of a U-type tube rupture in steam generator C

圖5 t 1時刻診斷結果Fig.5 Diagnosis result in timet 1
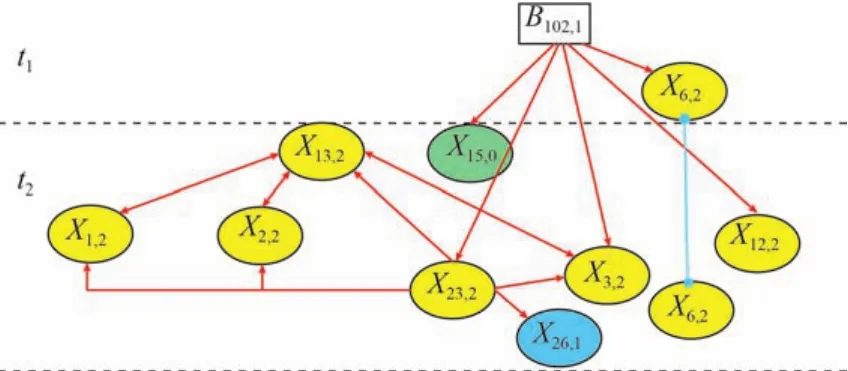
圖6 t 2時刻的DUCG診斷結果Fig.6 The diagnosis result at timet 2其中只有X 15,0這一個負證據
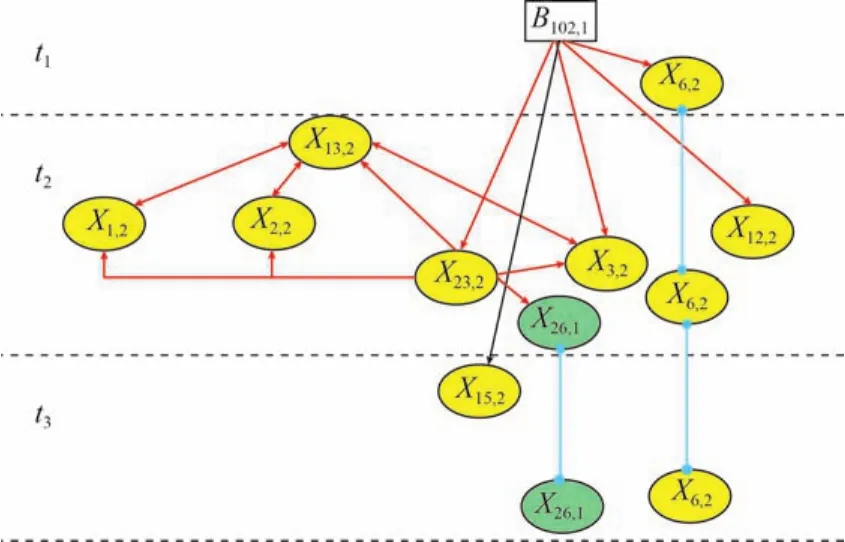
圖7 t 3時刻的DUCG診斷結果Fig.7 The diagnosis result at timet 3其中已無負證據
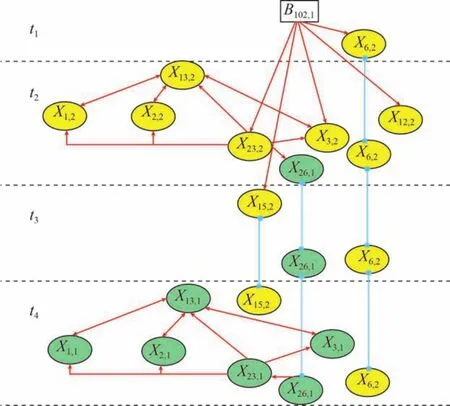
圖8 t 4時刻的DUCG診斷結果Fig.8 The diagnosis result at timet 4
1.2 發電機故障診斷
大亞灣嶺東核電站發電機組的DUCG故障診斷知識庫如圖10所示。其中包含了633個變量,由32個DUCG子圖自動合成。其中B變量205個,X變量427個,邏輯門 (G變量)5個,缺省變量 (D變量,即未知或缺省原因變量)1個,因果關系矩陣2952個。
采用取自SIS系統的實時數據 (期間沒有異常發生),由領域工程師根據各種故障可能的信號變化人為修改數據,使之模擬故障工況數據,進行試驗,共設計了26個故障,在信號充分時,均達到100%的診斷正確率。
此例中,將變量的物理位置在發電機的平面圖和立體圖 (可任意旋轉)上進行了關聯,可以在應用界面中直接看到故障發生的位置,結合屏幕上的文字說明,幫助操作員直觀了解具體是什么故障及其精準位置,如圖11~圖12所示。
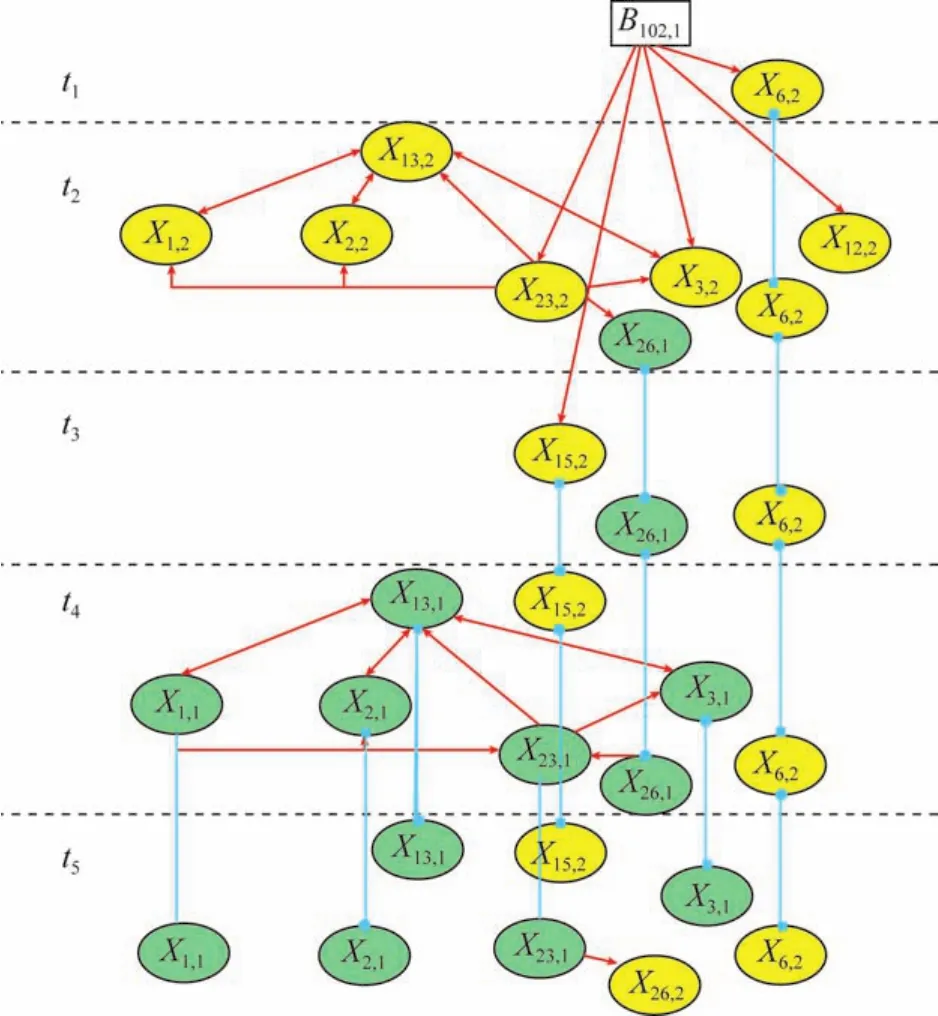
圖9 t 5時刻的DUCG診斷結果Fig.9 The diagnosis result at timet 5
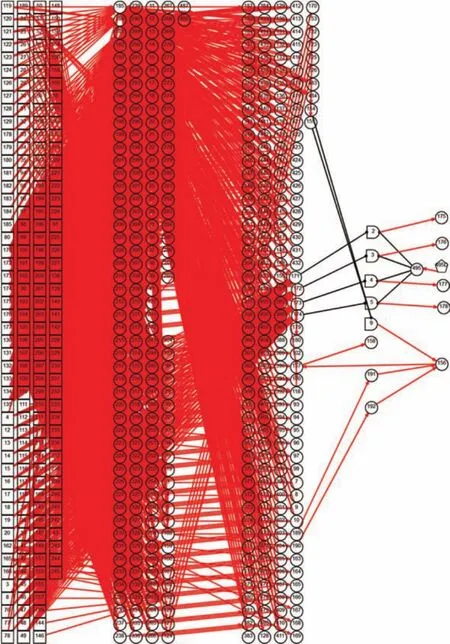
圖10 嶺東核電站發電機DUCG故障診斷知識庫Fig.10 DUCG knowledge base for fault diagnosis of generator of Lingdong NPP
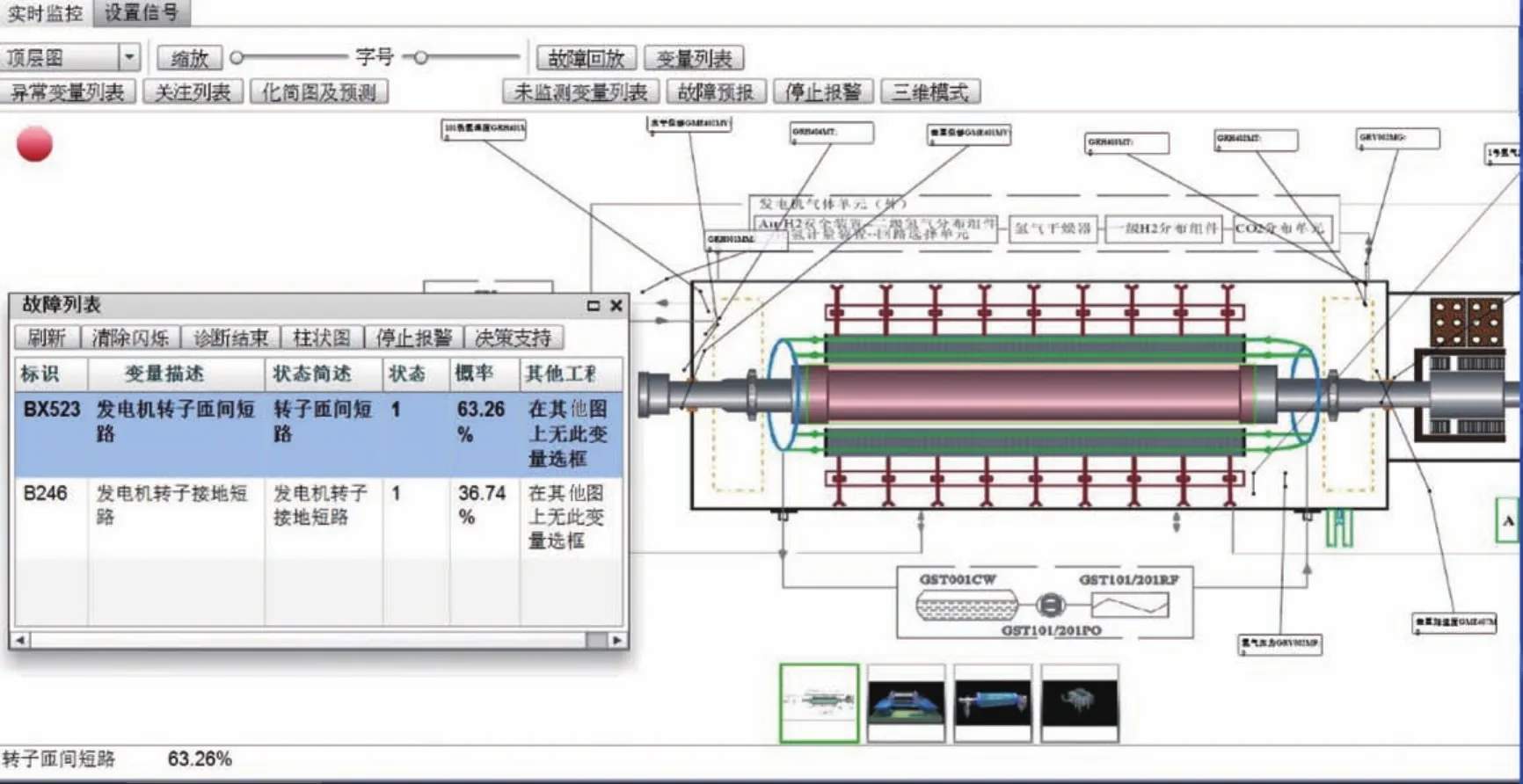
圖11 發電機兩個可能故障的圖形及列表排序顯示Fig.11 Two possible faults ranked according to pr obabilities with graphical location
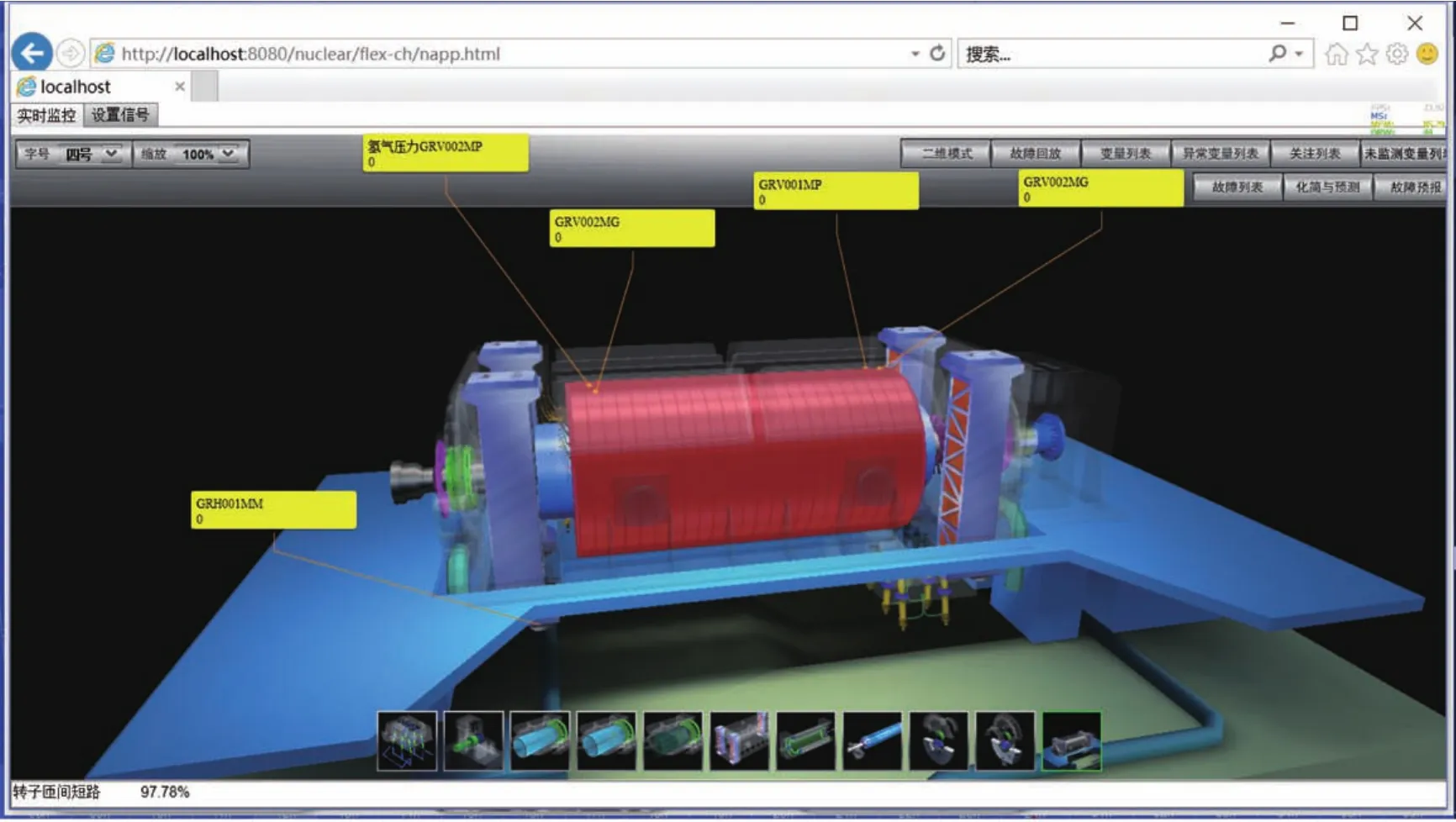
圖12 發電機轉子匝間短路診斷結果三維顯示圖Fig.12 3D graphical fault location of short circuit bet ween rotors of generator
1.3 二回路故障診斷及優化應對措施
依托設在北京的寧德核電站1號機組的模擬機進行了DUCG知識庫建庫和故障實驗,所建造的二回路知識庫如圖13所示。
其中包含175個變量,B變量 (故障或故障組合)34個,BX變量 (集成故障,代表信號缺少無法區分但影響相同的一組B變量)2個,X變量139個。完成典型故障實驗24個,診斷正確率100%,在常規筆記本電腦上運行每一步推理時間小于1 s,能夠跟上核電機組每秒發送一組信號的頻率。實驗中收到的信號曲線示例如圖14~圖15所示。
故障診斷結果圖示例如圖16所示。
基于DUCG的正確檢測、預報、診斷和發展預測,可以準確采用EOP而非SOP來處理故障。初步實驗和分析 (包括安全性和經濟性比較)表明:采用精準的EOP可顯著提升核電站安全性和經濟效益。本實驗中至少10個的效益非常明顯 (可避免跳堆)。
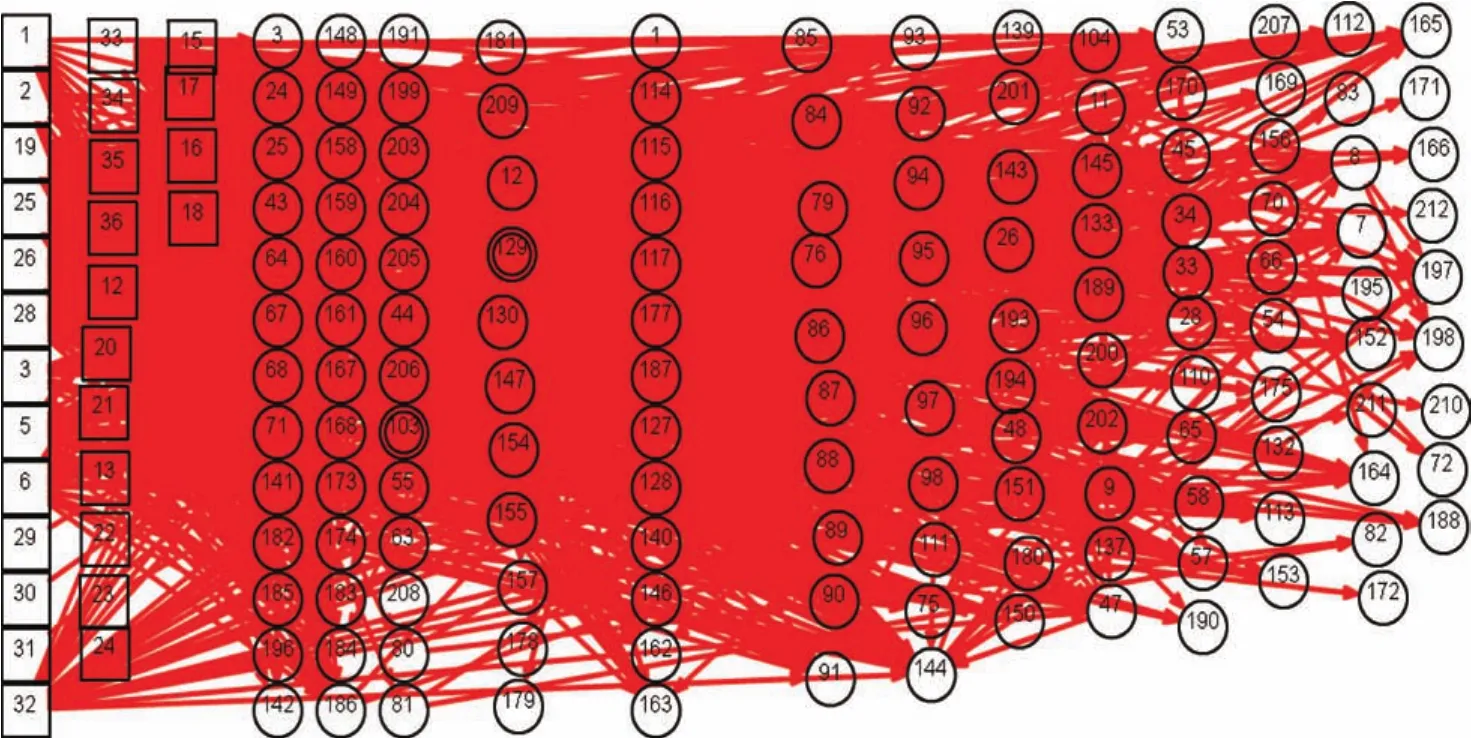
圖13 寧德核電1號機組二回路故障診斷DUCG圖Fig.13 DUCGf or fault diagnosis of secondary loop,Unit 1,Ningde NPP
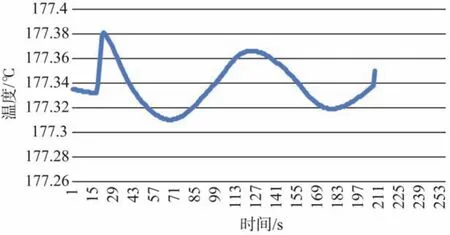
圖14 給水除氣系統水箱溫度變化Fig.14 Temperature of feed water gas cleaner
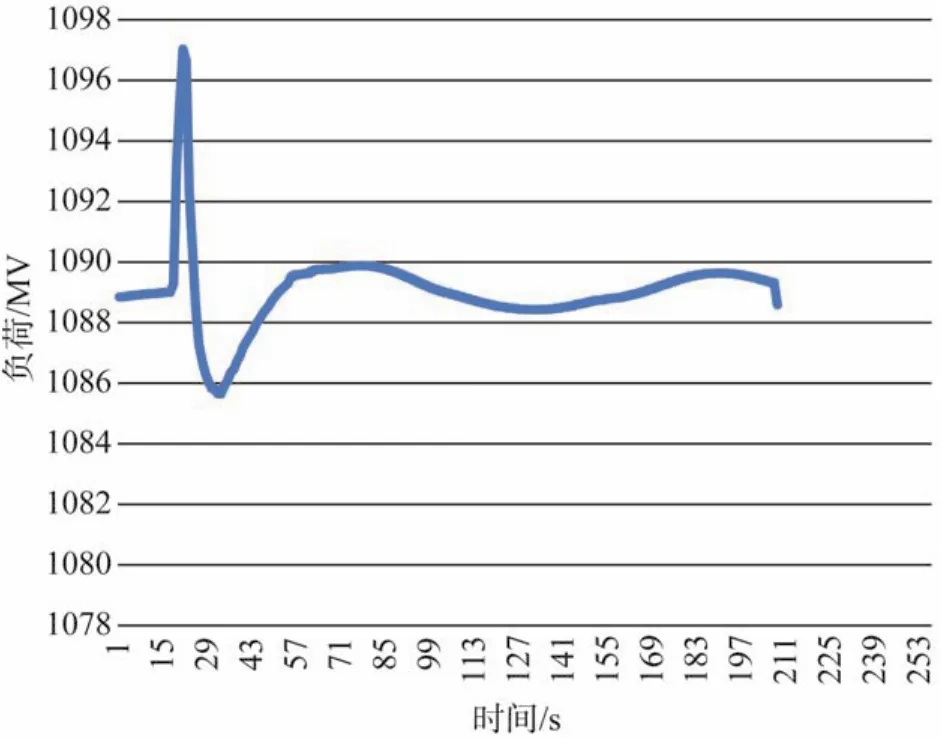
圖15 汽輪機負荷Fig.15 Load of turbine
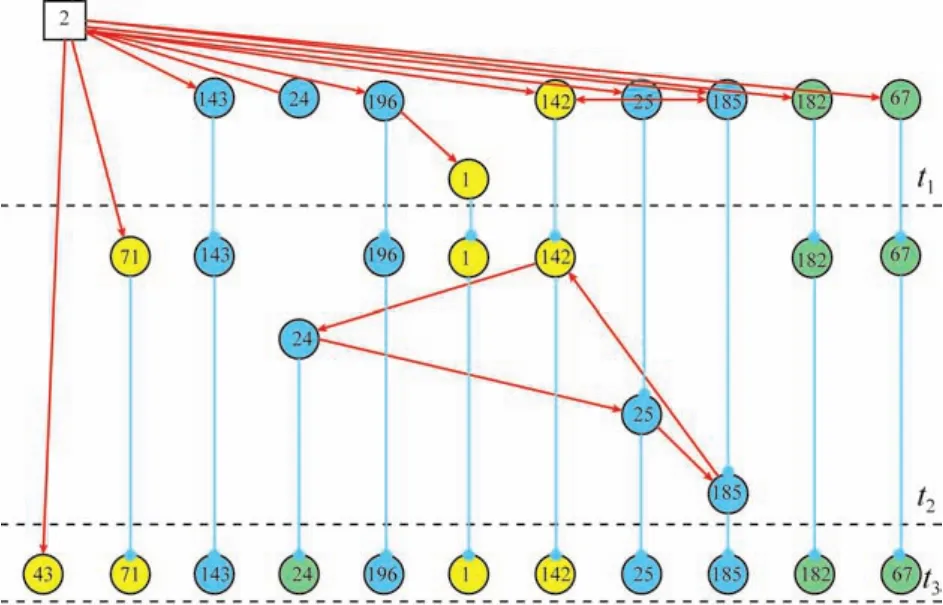
圖16 2號故障診斷的動態生成的診斷結果及信號發展隨時間變化的DUCG立體圖Fig.16 Cubic DUCGshowing diagnostic result automatically generated according to dynamic evidence received online
從實用性的角度,進行了操作員實驗:將操作員分為兩組,一組無DUCG輔助,另一組有。第一次實驗第一組費時較少,因為第二組不熟悉如何使用DUCG;第二次實驗兩組不相上下;第三次實驗第二組明顯勝出。
根據DUCG的正確診斷,可以實施更為精準的故障工況操作。以下是一個實例。
故障描述:凝結水抽取泵CEX001PO故障停運,且CEX003PO泵無法啟動。此時,只有CEX002PO一臺泵在運行,除氧器水位控制閥CEX025 VL和026 VL處于自動調節狀態,為保持除氧器的水位平衡,將會加大泵和閥的開度。由于一臺凝結水抽取泵只能提供50%的流量,而此時機組仍以滿功率運行,除氧器的水位將緩慢下降,CEX025 VL、026 VL開度繼續增大,導致CEX002PO因流量過大而出口壓力降低。當出口壓力低于1.63 MPa時,凝結水抽取泵CEX002PO將面臨跳泵風險。此外,CEX002PO流量過大,也會增加泵因汽蝕而停運或損壞的風險。一旦CEX002PO跳泵,意味著三臺凝結水抽取泵全部停運,勢必引起除氧器水位低,引發跳堆。
SOP操作規程:
目標:維持除氧器水位 (此時報警信號較多,除氧器水位報警信號等級較高)。
操作:由于除氧器水位下降,根據 “什么參數發生變化了,就控制什么參數”的原則,將會繼續開大除氧器水位控制閥CEX025 VL和026 VL開度。
結果:除氧器水位繼續降低,導致跳堆;泵CEX002PO由于出口壓力過低或汽蝕損壞跳泵,引起跳堆;由于CEX002PO流量過大發生汽蝕,導致泵損壞或使用壽命縮短。
在DUCG診斷基礎上按照EOP操作規程,可操作如下:
目標:同時維持除氧器水位和CEX泵的出口壓力。
操作:手動啟動CEX003PO,確認該備用泵無法啟動。關注除氧器水位和CEX泵的出口壓力兩個參數,將除氧器水位控制閥CEX025 VL和026 VL切為手動調節,在保證水位不過低的同時,出口壓力也不過低。由于故障原因經DUCG診斷已經確定,一臺CEX泵無法滿足機組負荷,需要很快地以5%(50 MW/min)的速度降功率至50%功率 (500 MW)。此時,一個CEX泵已經能夠維持這個功率,機組大致處于穩定狀態。降功率過程中仍需要關注除氧器水位和CEX泵的出口壓力,保證這兩個參數不進入跳堆區間。由于手動調節不能夠自動跟蹤瞬態,為降低風險,需要適時將控制閥CEX025 VL和026 VL切回自動調節。為保證操作中的無擾動切換,需要待功率能夠維持500 MW時,調節CEX025 VL、026 VL,使除氧器水位至2.5 m,然后將這兩個閥門開到自動狀態,實現自動跟蹤和自動調節。
結果:切換至50%功率運行,避免非計劃停堆和泵汽蝕。
在進行的24個故障實驗中,至少有10個可以通過類似操作避免計劃外停堆,安全和經濟效益明顯。
此外,以上結果是在遵守現有操作規程的前提下實現的。如果根據DUCG的診斷結果,確知故障位置,則可修改目前粗放的操作規程,實現精準調控,預計會取得更加明顯的安全和經濟效益。
2 知識庫編輯器
DUCG知識庫的構建分為變量定義、構建子圖和子圖合成三個步驟。變量定義可在二維工程圖和三維工程圖上進行定位,并在應用界面中按照定位閃爍顯示。圖17~圖18是變量定義示例,圖19~圖20是子圖構建示例,圖10和圖13是自動合成DUCG圖示例。合成圖是最終的知識庫,一般比較復雜,難以看懂。但可以把每一個根原因故障B變量的邏輯關系單獨顯示出來,以便審查其正確性。知識庫的修改通常在子圖中進行,局部修改后由DUCG編輯器自動合成為新知識庫。知識庫合成后,結合DUCG推理機和實時通信和預處理模塊,即可實現對象系統的實時在線動態故障監測、預報、診斷、發展預測和決策支持。
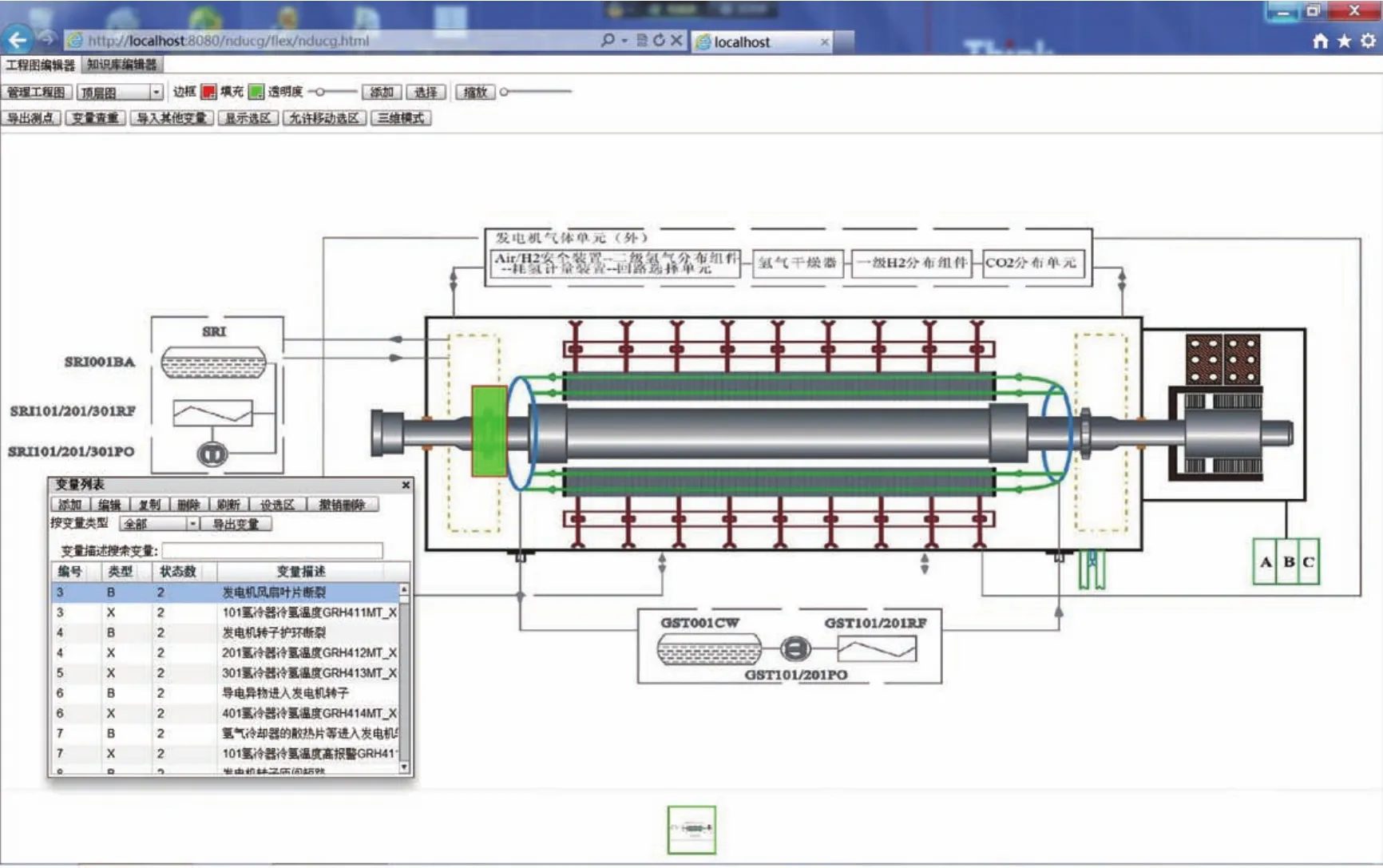
圖17 二維圖上的變量定義示例Fig.17 Illustration of variable definition on 2D graph
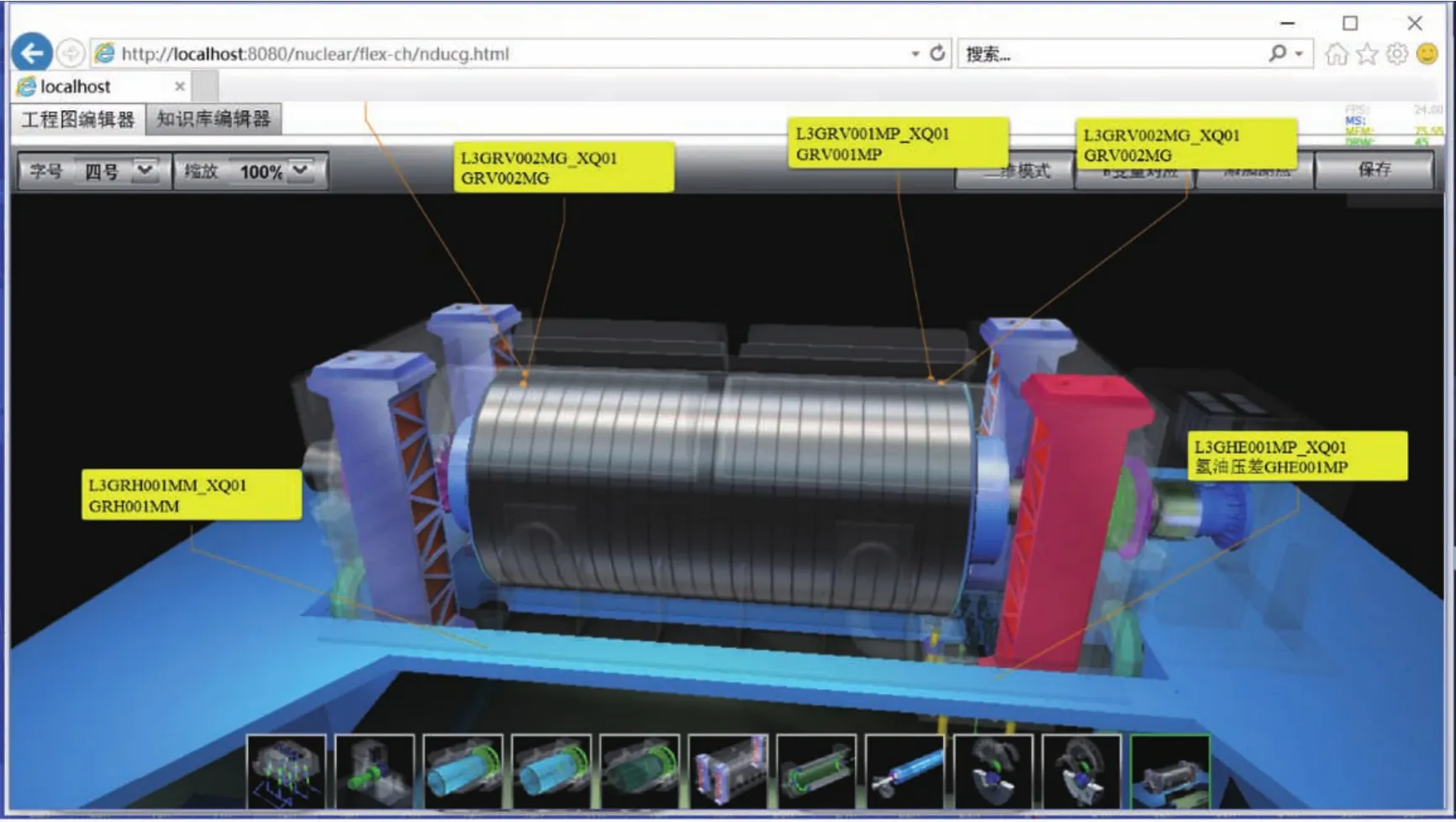
圖18 三維圖上的變量定義示例Fig.18 Illustrative example of variable definition on 3D graph
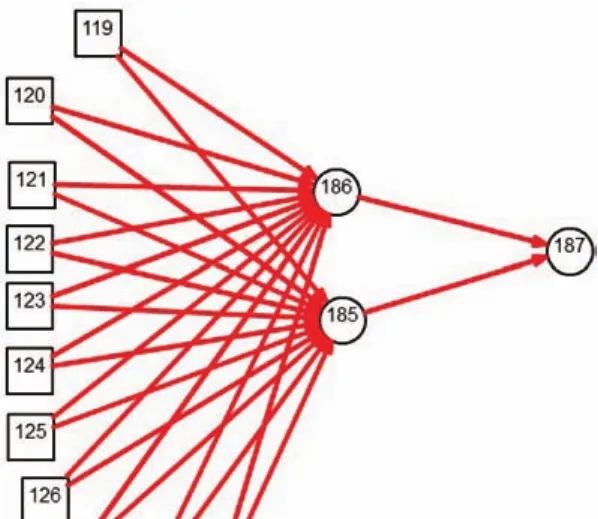
圖19 DUCG子圖示例1Fig.19 Illustration 1 of sub-DUCGs
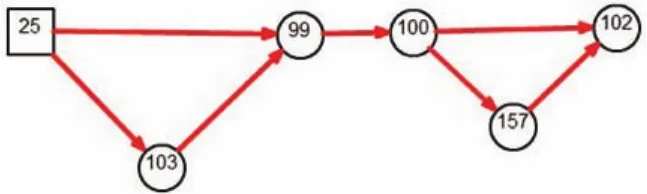
圖20 DUCG子圖示例2Fig.20 Illustration 2 of sub-DUCGs
3 發展需求和未來展望
1)進一步完善和測試有關功能,采用更好的編程語言 (例如采用J2EE改進推理機,使之能夠更好地利用數據庫功能、采用H5編寫用戶界面以替代目前已不受大公司支持的Flex),提高軟件可靠性和計算精度及速度,改善用戶界面。
2)進行工程實際應用中試,進一步檢驗DUCG系統的各項功能。
3)構建核電站各子系統的DUCG知識庫并進行測試驗證。
參考文獻:
[1]Qin Zhang,David Okrent,George Apostolakis,et al.An expert system approach for fault diagnosis to cope with spurious sensor signals and process state uncertainty[J].Reliability Engineering and System Safety,1991,34:121-142.
[2]Qin Zhang,Jin Gu,Xuegao An,et al.Application of FBOLES-a prototype expert system f or fault diagnosis of nuclear power plants[J].Reliability Engineering and System Safety,1994,44:225-235.
[3]Qin Zhang.Dynamic uncertain causality graph for knowledge representation and reasoning:discrete DAG cases[J].Journal of Computer Science and Technology,2012,27(1):1-23.
[4]Qin Zhang,Chunling Dong,Yan Cui,et al.Dynamic uncertain causality graph for knowledge representation and probabilistic reasoning:statistics base,matrix and fault diagnosis[J].IEEE Trans.Neural Net works and Learning Systems,2014,25(4):645-663.
[5]Qin Zhang.Dynamic uncertain causality graph for knowledge representation and probabilistic reasoning:directed cyclic graph and joint probability distribution[J].IEEE Trans.Neural Net works and Learning Systems,2015,26(7):1503-1517.
[6]Qin Zhang.Dynamic uncertain causality graph for knowledge representation and probabilistic reasoning:continuous variable,uncertain evidence and failure forecast[J].IEEE Trans.Systems,Man and Cybernetics,2015,45(7):990-1003.
[7]Qin Zhang,Shichao Geng.Dynamic uncertain causality graph applied to dynamic fault diagnosis of large and complex systems[J].IEEE Trans.Reliability,2015,64(3):910-927.
[8]Qin Zhang,Zhan Zhang.Dynamic uncertain causality graph applied to dynamic fault diagnoses and predictions with negative feedbacks[J].IEEE Trans.Reliability,2016,65(2):1030-1044.
[9]Qin Zhang,Quanying Yao.Dynamic uncertain causality graph for knowledge representation and reasoning:utilization of statistical data and domain knowledge in complex cases[J].IEEE Trans.Neural Net works and Learning Systems,DOI:10.1109/TNNLS.2017.2673243,2017.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
