平面四桿機(jī)構(gòu)剛體導(dǎo)引綜合的小波特征參數(shù)法
2018-04-03 01:08:23孫建偉劉文瑞褚金奎
中國機(jī)械工程 2018年6期
孫建偉 王 鵬 劉文瑞 褚金奎
1.長春工業(yè)大學(xué)機(jī)電工程學(xué)院,長春,1300122.大連理工大學(xué)精密與特種加工教育部重點(diǎn)實(shí)驗(yàn)室,大連,116023
0 引言
機(jī)構(gòu)尺度綜合的本質(zhì)是設(shè)計出能夠滿足預(yù)期函數(shù)要求、軌跡要求或剛體導(dǎo)引要求的機(jī)構(gòu),包括三個方面:函數(shù)綜合、軌跡綜合和剛體導(dǎo)引綜合。機(jī)構(gòu)的剛體導(dǎo)引綜合比另兩種尺度綜合更困難,因?yàn)閯傮w導(dǎo)引綜合不僅要求其剛體轉(zhuǎn)角滿足給定的轉(zhuǎn)角函數(shù),而且同時要求其剛體位置滿足給定的點(diǎn)位位置。剛體導(dǎo)引綜合作為四桿機(jī)構(gòu)設(shè)計的一個重要的方面,在實(shí)際的工程應(yīng)用中有著重要意義。國內(nèi)外許多學(xué)者已經(jīng)提出多種解決連桿機(jī)構(gòu)剛體導(dǎo)引綜合問題的方法[1-6]。圖譜法是一種必要的尺度綜合方法[7],HRONES等[8]建立了包含10 000個四桿機(jī)構(gòu)的圖譜。隨著計算機(jī)網(wǎng)絡(luò)技術(shù)的發(fā)展,數(shù)值圖譜法逐漸取代了效率和精度不足的傳統(tǒng)曲線圖譜法。王知行等[9]利用數(shù)值圖譜法對平面四桿機(jī)構(gòu)綜合數(shù)值比較法進(jìn)行了研究。PANG等[10]、MULLINEUX[11]利用數(shù)值圖譜法分別對平面和空間機(jī)構(gòu)尺度綜合進(jìn)行了分析。孫建偉等[12-13]基于數(shù)值圖譜法理論對RCCC機(jī)構(gòu)的函數(shù)綜合和軌跡綜合進(jìn)行了深入研究。
傅里葉級數(shù)法在數(shù)值圖譜中對整周期的尺度綜合較為普遍,文獻(xiàn)[14]首次提出將傅里葉級數(shù)理論用于平面連桿機(jī)構(gòu)的綜合問題。文獻(xiàn)[15]利用快速傅里葉變換對平面四桿機(jī)構(gòu)連桿曲線進(jìn)行了綜合。文獻(xiàn)[16]利用傅里葉級數(shù)對平面剛體導(dǎo)引綜合問題進(jìn)行了研究。然而,由于傅里葉級數(shù)只能保證結(jié)果在整個周期上對給定設(shè)計條件進(jìn)行逼近,無法保證給定的設(shè)計區(qū)間的設(shè)計精度,而多數(shù)情況下,對某一特定區(qū)間進(jìn)行設(shè)計更加符合實(shí)際需求[17-18]。小波函數(shù)在時域和頻域上都具有較好的解析能力,因此,對非整周期設(shè)計條件下的尺度綜合問題具有獨(dú)特的優(yōu)勢[19-20]。
本文基于數(shù)值圖譜法的基本思想和小波級數(shù)理論,根據(jù)文獻(xiàn)[21-22]研究非整周期函數(shù)、軌跡的成果,提出了基于小波級數(shù)進(jìn)行平面四桿機(jī)構(gòu)非整周期剛體導(dǎo)引輸出特征提取方法,并建立了相應(yīng)的四桿機(jī)構(gòu)剛體導(dǎo)引輸出特征參數(shù)數(shù)據(jù)庫,利用建立的數(shù)據(jù)庫、模糊識別理論和給出的理論公式,達(dá)到實(shí)現(xiàn)平面四桿機(jī)構(gòu)非整周期給定設(shè)計區(qū)間的剛體導(dǎo)引綜合的目的。
1 連桿轉(zhuǎn)角函數(shù)與剛體轉(zhuǎn)角函數(shù)的關(guān)系


(1)
式中,θt(θt=ωt) 為運(yùn)動時刻t的函數(shù),ω為角速度。

圖1 剛體導(dǎo)引機(jī)構(gòu)示意圖Fig.1 Diagram of motion generation mechanism
當(dāng)曲柄旋轉(zhuǎn)的時候,復(fù)平面上由P、Q兩點(diǎn)生成的連桿曲線如下:
rP(θ1)=Lβeiβ+L1ei(θ1+θ4)+LPei(θP+θ2+θ4)
(2)
rQ(θ1)=Lβeiβ+L1ei(θ1+θ4)+LQei(θQ+θ2+θ4)
(3)
連桿CD上的標(biāo)線PQ可以表示為
PQ(θ1)=rQ(θ1)-rP(θ1)=
(LQei(θQ+θ4)-LPei(θP+θ4))eiθ2
(4)
式(4)即為帶有預(yù)定時標(biāo)的平面四桿剛體導(dǎo)引生成的基本公式。由該式可以看出,四桿機(jī)構(gòu)的剛體導(dǎo)引的位置生成函數(shù)取決于連桿轉(zhuǎn)角函數(shù),而機(jī)構(gòu)的連桿轉(zhuǎn)角又由機(jī)構(gòu)的基本尺寸型決定。也就是說,帶有預(yù)定時標(biāo)剛體導(dǎo)引機(jī)構(gòu)的位置轉(zhuǎn)角函數(shù)由機(jī)構(gòu)的基本尺寸型決定。矢量LQei(θQ+θ4)-LPei(θP+θ4)只影響運(yùn)動剛體的點(diǎn)位,它由與基本尺寸型相對應(yīng)的實(shí)際機(jī)構(gòu)和連桿的標(biāo)線位置所決定,這就確定了帶有預(yù)定時標(biāo)剛體導(dǎo)引轉(zhuǎn)角函數(shù)與連桿轉(zhuǎn)角函數(shù)之間的關(guān)系。
由圖1可知:

(5)
由式(5)可得
γ(θ1)=θ2(θ1)+
(6)
令
則式(6)可寫為
γ(θ1)=θ2(θ1)+K
(7)
2 剛體轉(zhuǎn)角輸出的小波分析
根據(jù)文獻(xiàn)[21]可知,在小波分析過程中有尺度函數(shù)φ和小波函數(shù)ψ,分別表示如下:
(8)
(9)
已知任意連續(xù)函數(shù)都可以由φ(2jθt)函數(shù)表示,四桿機(jī)構(gòu)輸出的小波分析可以描述為[23]
(10)
式中,j為小波分解級數(shù);y(0)為小波平均數(shù);w(n,l)為第n級第l個小波細(xì)節(jié)數(shù)。
小波平均數(shù)和全部細(xì)節(jié)數(shù)構(gòu)成了小波系數(shù),根據(jù)以上分析可知,連桿轉(zhuǎn)角函數(shù)θ2經(jīng)過小波變換可表示為
(11)
θ2(2j))φ(θt/θ)
(12)

2j-n)+…+θ2(2j-nl-1)]/2j-n}ψ(2nθ0/θ-l+1)
(13)
式中,θ2(1),θ2(2),θ2(3),…,θ2(2j)為連桿轉(zhuǎn)角函數(shù)采樣點(diǎn),θ為設(shè)計區(qū)間。
類似地,剛體轉(zhuǎn)角輸出函數(shù)γ由小波變換可表述為
(14)
(15)

2j-n)+…+γ(2j-nl-1)]/2j-n}ψ(2nθt/θ-l+1)
(16)
式中,γ(1),γ(2),γ(3), …,γ(2j)為剛體轉(zhuǎn)角采樣點(diǎn)。
由式(7)可知:
γ(m)=θ2(m)+K
(17)
m=1,2,…,2j-nl-1
將式(17)代入式(15)和式(16)中有
(18)
(19)
根據(jù)式(18)、式(19)可知,機(jī)構(gòu)相同基本尺寸型的剛體轉(zhuǎn)角和連桿轉(zhuǎn)角的小波細(xì)節(jié)數(shù)相等,其小波平均數(shù)相差參數(shù)K(K是由LP、LQ、θP、θQ、θ4決定的),因此剛體轉(zhuǎn)角輸出的特征可以由式(19)連桿轉(zhuǎn)角的小波細(xì)節(jié)數(shù)決定。而對于四桿機(jī)構(gòu),連桿轉(zhuǎn)角由四桿機(jī)構(gòu)的四根桿長L1、L2、L3、L4決定,所以定義L1、L2、L3、L4為機(jī)構(gòu)的基本尺寸型。

圖2 掃描圖Fig.2 Scanning steps
3 平面四桿剛體導(dǎo)引綜合方法
3.1 建立基本尺寸型數(shù)據(jù)庫及模糊識別
(20)


表1 數(shù)據(jù)庫中的10組基本尺寸型Tab.1 10 sets of the MBDT in the database

表2 剛體轉(zhuǎn)角和相應(yīng)的連桿轉(zhuǎn)角的小波系數(shù)Tab.2 The wavelet coefficients of the RBRA and the corresponding CRRA
3.2 計算實(shí)際尺寸及安裝位置參數(shù)

(21)


(22)
式(22)由實(shí)部和虛部構(gòu)成,并且LP、θP、θ4可以寫成:
(23)
(24)
由基本尺寸型所生成的剛體位置的小波平均數(shù)如下:

(25)
類似地,由目標(biāo)機(jī)構(gòu)所生成的剛體位置的小波平均數(shù)如下:

(26)

((E0(θ2)+E1(θ2)+…+E2j-1(θ2))2-jφ(θt/θ)=
代入式(26)中,有

(27)

(28)

(29)
將θ4代入式(24)可求出θP,將L1、θ4、LP、θP代入式(2)中得
rP(θ1)-L1ei(θ1+θ4)-LPei(θP+θ2+θ4)=Lβeiβ
(30)
通過選定圖1中剛體預(yù)定位置的P點(diǎn)作為參考點(diǎn),將這個點(diǎn)和相應(yīng)的θ1和θ2的值代入式(30)中,目標(biāo)機(jī)構(gòu)的機(jī)架位置可由下式求出:
Lβ={[Re(rP(θ1)-L1ei(θ1+θ4)-LPei(θP+θ2+θ4))]2+
(31)
β=arctan((Im(rP(θ1)-L1ei(θ1+θ4)-LPei(θP+θ2+θ4)))2/
(Re(rP(θ1)-L1ei(θ1+θ4)-LPei(θP+θ2+θ4)))2)
(32)
3.3 平面四桿剛體導(dǎo)引綜合步驟
當(dāng)機(jī)構(gòu)基本尺寸型的轉(zhuǎn)角滿足剛體轉(zhuǎn)角的設(shè)計要求時,機(jī)構(gòu)位置可以通過分析文獻(xiàn)[22]中小波特征參數(shù)來得到。因此,平面四桿機(jī)構(gòu)剛體導(dǎo)引的綜合可以由以下步驟實(shí)現(xiàn)(圖3)。

圖3 平面四桿剛體導(dǎo)引綜合流程圖Fig.3 Flow chart of planar four-bar motion generation synthesis
(1)根據(jù)所要求的剛體轉(zhuǎn)角和由機(jī)構(gòu)基本尺寸型所決定的連桿轉(zhuǎn)角的小波系數(shù)之間的關(guān)系,建立一個關(guān)于轉(zhuǎn)角輸出特征參數(shù)的數(shù)值圖譜數(shù)據(jù)庫。
(2)通過對給定剛體轉(zhuǎn)角進(jìn)行采樣,并對其進(jìn)行Haar小波變換,得到轉(zhuǎn)角小波系數(shù)。
(3)在數(shù)值圖譜庫里對步驟(2)中得到的轉(zhuǎn)角特征參數(shù)和相應(yīng)小波參數(shù)進(jìn)行識別。利用模糊識別的方法,從中得到滿足要求的若干組機(jī)構(gòu)基本尺寸型。
(4)將位置問題轉(zhuǎn)換成剛體軌跡綜合問題,將步驟(3)中識別出的基本尺寸型與給定的帶有預(yù)定時標(biāo)的曲線進(jìn)行軌跡綜合。
(5)利用式(21)~式(32),機(jī)構(gòu)的實(shí)際尺寸和安裝位置可以全部得出。
4 綜合算例
4.1 理論算例
為驗(yàn)證上述方法理論及公式推導(dǎo)的正確性,本文首先建立了包含101 408組平面四桿機(jī)構(gòu)的基本尺寸型數(shù)據(jù)庫,在數(shù)據(jù)庫中任選一組基本尺寸型為目標(biāo)機(jī)構(gòu)。本文選取基本尺寸型數(shù)據(jù)庫中第66 077組基本尺寸型:L1=30 mm,L2=100 mm,L3=114 mm,L4=156 mm,安裝位置為LP=10 mm,LQ=25 mm,θP=π/4,θQ=π/9,Lβ=10 mm,β=π/4,θ4=π/6,輸入角θ1∈[30°, 120°]。選取小波分解級數(shù)j=4。利用3.3節(jié)的步驟即可進(jìn)行帶有預(yù)定時標(biāo)四桿機(jī)構(gòu)剛體導(dǎo)引的尺度綜合。表3所示為通過模糊識別確定的10組機(jī)構(gòu)基本尺寸型。
表4所示為綜合出的機(jī)構(gòu)實(shí)際尺寸和安裝位置等參數(shù)。圖4所示為綜合出的機(jī)構(gòu)剛體導(dǎo)引標(biāo)線與給定剛體導(dǎo)引標(biāo)線的擬合比較(給出了2組機(jī)構(gòu)剛體導(dǎo)引標(biāo)線的擬合圖),其中實(shí)線代表給定的剛體導(dǎo)引標(biāo)線,虛線代表綜合所得機(jī)構(gòu)生成的剛體導(dǎo)引標(biāo)線。從圖4中可以看出,第2組為相近的基本尺寸型生成的剛體標(biāo)線與原標(biāo)線的擬合,效果相當(dāng)理想,而第5組識別出的為目標(biāo)機(jī)構(gòu)的基本尺寸型生成的標(biāo)線,并與原標(biāo)線完全重合,即驗(yàn)證了理論公式的正確性和本文方法的有效性。

表3 綜合結(jié)果Tab.3 Synthesized results

表4 機(jī)構(gòu)實(shí)際尺寸和安裝位置參數(shù)Tab.4 Parameters of the actual size and installing positions
4.2 實(shí)際算例
為生產(chǎn)裝配線設(shè)計一個輸送工件的鉸鏈四桿機(jī)構(gòu),如圖5所示,標(biāo)線1-1為要求輸送工件的起始位置,標(biāo)線2-2為輸送工件的完成位置。軌跡1-2為P點(diǎn)所經(jīng)歷的預(yù)定位置。要求被輸送的工件的轉(zhuǎn)角和位置滿足:
γ=0.9θ1-261°px=29cosθ1py=48sinθ1
θ1∈[290°,320°]
式中,θ1為曲柄轉(zhuǎn)角;γ為剛體轉(zhuǎn)角,是關(guān)于輸入角的函數(shù);px為P點(diǎn)橫坐標(biāo);py為P點(diǎn)縱坐標(biāo)。

(a)第2組

(b)第5組

圖5 設(shè)計示意圖Fig.5 Design schematic

圖4 機(jī)構(gòu)生成的標(biāo)線與給定剛體標(biāo)線的擬合Fig.4 Fitting of the prescribed guidance-line and generated guidance-line
根據(jù)前面給出的步驟進(jìn)行設(shè)計。
(1)建立了含有101 408組基本尺寸型的剛體轉(zhuǎn)角的數(shù)值圖譜數(shù)據(jù)庫。
(2)計算剛體轉(zhuǎn)角函數(shù)的前8個小波系數(shù),列于表5中。
(3)經(jīng)過模糊識別選取的10組機(jī)構(gòu)基本尺寸型和相應(yīng)的相似度δ列于表6。

表5 平面四桿機(jī)構(gòu)剛體轉(zhuǎn)角的小波系數(shù)Tab.5 Wavelet coefficients of RBRA function of planar four-bar mechanism
(4)在剛體導(dǎo)引標(biāo)線上選取P點(diǎn)位置的前8個小波系數(shù)列于表7中。
(5)通過理論計算公式確定的機(jī)構(gòu)實(shí)際尺寸、標(biāo)線位置(P點(diǎn)位置)、曲柄起始位置和機(jī)構(gòu)安裝尺寸參數(shù)列于表8。所要求的剛體轉(zhuǎn)角和剛體位置以及機(jī)構(gòu)基本尺寸型生成的剛體轉(zhuǎn)角和剛體位置擬合的程度如圖6所示,所產(chǎn)生的轉(zhuǎn)角誤差和位置誤差如圖7和圖8所示。由圖6可以看出,逼近程度相當(dāng)理想,即用本方法確定的機(jī)構(gòu)可以較好地實(shí)現(xiàn)帶有預(yù)定時標(biāo)剛體導(dǎo)引的尺度綜合,并可以給出多個機(jī)構(gòu)的設(shè)計方案。
表6識別出的基本尺寸型和相應(yīng)的相似度
Tab.6IdentifiedMBDTandthecorrespondingsimilarities

序號L′1L′2L′3L′4δ(10-5)182871151160.6584281861161170.6720350531481490.6386451541471480.6234586911111120.6662685901121130.6557784891131140.6507883881141150.6515952551461470.62621053561451460.6453

表7 預(yù)定位置的小波系數(shù)Tab.7 Wavelet coefficients of the prescribed position
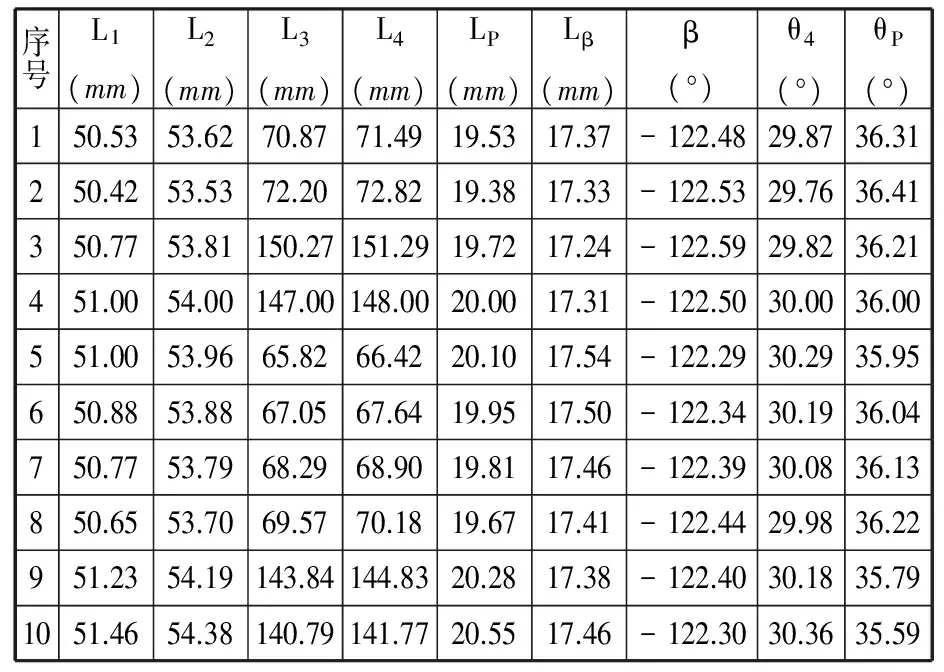
表8 綜合機(jī)構(gòu)實(shí)際尺寸及安裝位置參數(shù)Tab.8 Actual sizes and installation positions of the synthesized mechanism
5 結(jié)論
(1)本文建立了平面四桿機(jī)構(gòu)剛體導(dǎo)引的數(shù)學(xué)模型,通過對剛體轉(zhuǎn)角輸出和其對應(yīng)連桿轉(zhuǎn)角輸出小波變換的分析,發(fā)現(xiàn)了小波系數(shù)之間的關(guān)系。根據(jù)這一關(guān)系建立了包含101 408組基本尺寸型的平面四桿機(jī)構(gòu)剛體導(dǎo)引輸出特征參數(shù)數(shù)據(jù)庫。
(2)利用模糊識別理論識別出與給定的剛體轉(zhuǎn)角相對應(yīng)的連桿轉(zhuǎn)角的基本尺寸型,將剛體位置轉(zhuǎn)化為軌跡綜合問題,給出了計算機(jī)構(gòu)實(shí)際尺寸及實(shí)際安裝位置的理論公式,從而實(shí)現(xiàn)了平面四桿機(jī)構(gòu)的非整周期剛體導(dǎo)引綜合問題的求解。

(a)第3組擬合

(b)第4組擬合圖6 剛體轉(zhuǎn)角和剛體位置擬合圖Fig.6 Fitting graphs of motion rotation angle and motion position

(a)第3組轉(zhuǎn)角誤差

(b)第4組轉(zhuǎn)角誤差圖7 轉(zhuǎn)角誤差Fig.7 Rotation angle errors

(a)第3組位置誤差

(b)第4組位置誤差圖8 位置誤差Fig.8 Position errors
(3)本文提出的方法在解析幾何算法的精度和圖譜法的計算方面上有優(yōu)勢,而且避免了非線性方程的求解以及克服了傅里葉級數(shù)不能很好地描述非整周期機(jī)構(gòu)剛體導(dǎo)引的缺點(diǎn);同時,可以根據(jù)剛體導(dǎo)引生成要求給出多組可供設(shè)計者選擇的綜合結(jié)果。
參考文獻(xiàn):
[1]吳鑫,褚金奎,曹惟慶.帶有預(yù)定時標(biāo)平面四桿剛體導(dǎo)引機(jī)構(gòu)尺度綜合的研究[J]. 機(jī)械工程學(xué)報, 1999, 35(5): 106-110.
WU Xin, CHU Jinkui, CAO Weiqing. Study on Dimensional Synthesis of Planar Linkages for Rigid-body Guidance with Prescribed Timing[J]. Chinese Journal of Mechanical Engineering, 1999, 35(5): 106-110.
[2]WANG Z X, YU H Y , TANG D W, et al. Study on Rigid-body Guidance Synthesis of Planar Linkage[J]. Mechanism and Machine Theory, 2002, 37(7): 673-684.
[3]馮春, 謝進(jìn), 陳永. 利用混沌與分形進(jìn)行平面機(jī)構(gòu)綜合[J]. 中國機(jī)械工程, 2004, 15(9):753-756.
FENG Chun, XIE Jin, CHEN Yong. Using Chaos and Fractals to Synthesis Planar Mechanism[J].China Mechanical Engineering, 2004, 15(9):753-756.
[4]孫建偉, 路賀, 褚金奎. 基于傅里葉級數(shù)的RCCC機(jī)構(gòu)運(yùn)動綜合[J]. 中國機(jī)械工程, 2014, 25(21):2841-2847.
SUN Jianwei, LU He, CHU Jinkui. Fourier Series Method for Motion Generation of RCCC Mechanism[J].China Mechanical Engineering, 2014, 25(21):2841-2847.
[5]MYSZKA D H, MURRAY A P. Pole Arrangements that Introduce Prismatic Joints into the Design Space of Four-and Five-position Rigid-body Synthesis[J]. Mechanism and Machine Theory, 2010, 45(9): 1314-1325.
[6]ZHAO P, LI X, PURWAR A, et al. A Task-driven Unified Synthesis of Planar Four-bar and Six-bar Linkages with R-and P-joints for Five-position Realization[J]. Journal of Mechanisms and Robotics, 2016, 8(6): 061003.
[7]ALT H. Das Konstruieren von Gelenkvierecken unter Benutzung einer Kurventafel[J]. Z. VDI, 1941, 85: 69-72.
[8]HRONES J A, NELSON G L. Analysis of the Four-bar Linkage: Its Application to the Synthesis of Mechanisms[M]. New York:Press of the Massachusetts Institute of Technology,1951: 250-305.
[9]王知行, 關(guān)立文, 李建生, 等. 平面四桿機(jī)構(gòu)綜合數(shù)值比較法的研究[J]. 機(jī)械工程學(xué)報, 2000,36(2): 47-50.
WANG Zhixing, GUAN Liwen, LI Jiansheng, et al. Study on Numerical Comparison Method for Planar Four-bar Linkage Synthesis[J]. Journal of Mechanical Engineering, 2000, 36(2): 47-50.
[10]PANG Y, KROVI V. Fourier Methods for Synthesis of Coupled Serial Chain Mechanisms[J]. Journal of Mechanical Design, 2005, 127(2):232-241.
[11]MULLINEUX G. Atlas of Spherical Four-bar Mechanisms[J]. Mechanism and Machine Theory, 2011,46(11):1811-1823.
[12]孫建偉,褚金奎,衛(wèi)靜. 利用數(shù)值圖譜法進(jìn)行RCCC機(jī)構(gòu)的函數(shù)綜合[J].中國機(jī)械工程,2008,19(6):713-717.
SUN Jianwei, CHU Jinkui, WEI Jing. Research on RCCC Mechanism Path Generation by Using Numerical Atlas Method[J].China Mechanical Engineering, 2008,19(6):713-717.
[13]褚金奎,孫建偉. RCCC 機(jī)構(gòu)軌跡綜合的數(shù)值圖譜法[J].中國機(jī)械工程,2009,20(9):1024-1028.
CHU Jinkui, SUN Jianwei. Research on RCCC Mechanism Path Generation by Using Numerical Atlas Method[J].China Mechanical Engineering,2009,20(9):1024-1028.
[14]CAPELLEN W M Z. Kinematik und Dynamik der Kurbelschleife[J]. Werkstatt and Betrieb, 1956, 1: 581-584.
[15]褚金奎,曹惟慶. 用快速傅立葉變換進(jìn)行再現(xiàn)平面四桿機(jī)構(gòu)連桿曲線的綜合[J].機(jī)械工程學(xué)報,1993,29(5): 117-122.
CHU Jinkui, CAO Weiqing. Synthesis of Coupler Curves of Planar Four-bar Linkages through Fast Fourier Transform[J] . Chinese Journal of Mechanical Engineering, 1993, 29 (5) : 117-122.
[16]LI X, WU J, GE Q J. A Fourier Descriptor-based Approach to Design Space Decomposition for Planar Motion Approximation[J]. Journal of Mechanisms and Robotics, 2016, 8(6): 064501.
[17]孫建偉, 路賀, 褚金奎. 球面四桿曲柄滑塊機(jī)構(gòu)函數(shù)綜合的變步長數(shù)據(jù)庫法[J]. 農(nóng)業(yè)機(jī)械學(xué)報, 2013, 44(11): 329-335.
SUN Jianwei, LU He, CHU Jinkui. Variable Step Size Database Method for Function Generation of Spherical Four Bar Crank Slider Mechanism[J]. Transactions of the Chinese Society of Agricultural Machinery, 2013, 44(11): 329-335.
[18]孫建偉, 陳露, 褚金奎, 等. 球面四桿機(jī)構(gòu)自適應(yīng)數(shù)值圖譜法及在收割機(jī)中的應(yīng)用[J]. 農(nóng)業(yè)工程學(xué)報, 2016, 32(8): 56-62.
SUN Jianwei, CHEN Lu, CHU Jinkui, et al. Adaptive Numerical Atlas Method of Spherical Four-bar Mechanism and Its Applications for Harvester[J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(8): 56-62.
[19]王成志, 紀(jì)躍波, 孫道恒. 小波分析在平面四桿機(jī)構(gòu)軌跡綜合中的應(yīng)用研究[J].機(jī)械工程學(xué)報,2004, 40(8): 34-39.
WANG Chengzhi, JI Yuebo, SUN Daoheng. Research on Applying Wavelet Analysis to Path Synthesis for Coupler Curves of Planar Four-bar Linkages[J]. Chinese Journal of Mechanical Engineering, 2004,40(8):34-39.
[21]SUN J W, LIU W R, CHU J K. Synthesis of a Non-integer Periodic Function Generator of a Four-bar Mechanism Using a Haar Wavelet[J]. Inverse Problems in Science and Engineering, 2016, 24(5): 763-784.
[22]SUN J W, LIU W R, CHU J K. Dimensional Synthesis of Open Path Generator of Four-bar Mechanism Using the Haar Wavelet[J]. Journal of Mechanical Design, 2015, 137(8): 082303.
[23]DAUBECHIES I. Ten Lectures on Wavelets[M]. Philadelphia: Society for Industrial and Applied Mathematics, 1992:357.
(編輯王旻玥)
