基于ADAMS的桁架式三自由度伺服機械手路徑規劃和仿真
2018-04-02 07:17:04鮑仲輔曾德江
裝備制造技術 2018年1期
鮑仲輔,曾德江
(廣東機電職業技術學院,廣東 廣州510515)
0 前言
桁架式三自由度伺服機械手通常以伺服電機為動力元件,以滾珠絲杠、同步帶、齒條機構等直線模組為主要傳動形式,精度要求不高的場合可以氣缸代替,機械手基體多為金屬型材構成的桁架式結構。此類機械手一般多為三個軸向移動自由度,或兩個移動和一個轉動,可實施上下料、移栽、碼垛、焊接、點膠、3D打印等多種工作。這種機械手體積較大,但是結構簡單,便于控制,對工作環境要求不高,具有良好的性價比,因此在制造類企業中有廣泛的應用。
機械手在使用過程中最常見的問題就是運動規劃,也就是根據需要的動作路徑和運動參數求出運動輸入規律,即動力學反問題。常用的解決辦法就是基于DH坐標系構建機械手的坐標體系,通過矩陣變換求解,計算過程較為復雜[1]。基于機械數字仿真技術,可探索解決機械手軌跡規劃的新思路和途徑,如天津大學梅江平等人基于仿真對并聯機械手動態特性展開分析[2]。本文基于ADAMS動力學分析軟件,以一款桁架式三自由度伺服機械手空間螺旋線勻速路徑規劃問題為例,采用虛擬仿真實現求解。
1 機械手結構分析
桁架式三自由度伺服機械手一般分為基座、肩部和手臂三個部分,其中肩部在基座上可以水平直線運動,通常標記為X軸,也稱為橫行機構。手臂在肩部上也可以水平直線運動,通常記為Y軸,也稱為引拔機構。手臂自身可以在垂直方向直線運動,通常記為Z軸,主要結構如圖1所示。該機械手的X軸因需承載另外兩軸方向的結構件和工件,慣性載荷較大,所以多選擇穩定性較強的滾珠絲杠作為動力傳動元件。Y軸慣性載荷較小,同時需要有較快速的響應性能,以同步帶進行傳動。Z軸直接連接執行元件,需要有較高的穩定性和定位精度,采用齒條機構進行傳動。為保證結構穩定和傳動準確,每個自由度均需配有直線導軌加以導向,其中X和Y軸均采用導軌固定滑塊移動的安裝形式,而Z軸由于空間局限,則采用滑塊固定,導軌移動的安裝形式。
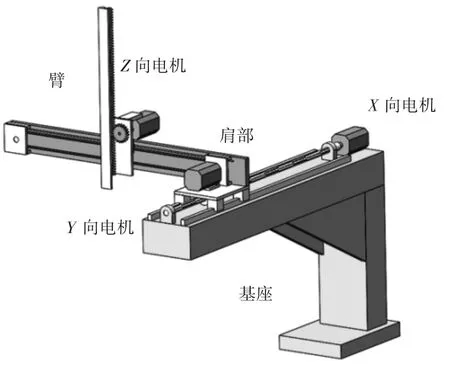
圖1 機械手結構
2 機械手軌跡規劃原理
2.1 基于DH坐標系求解關節直線位移
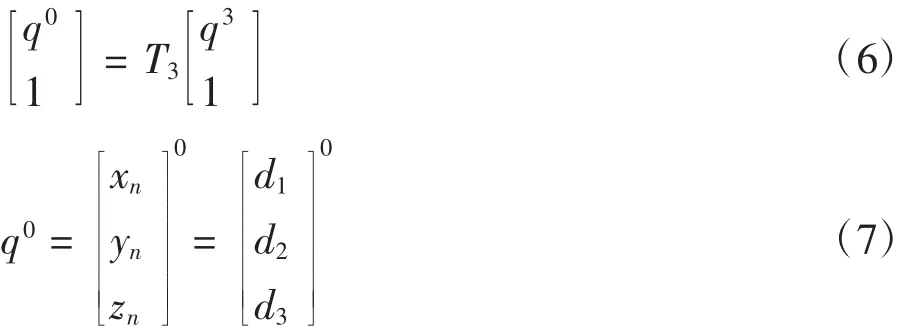
基于DH法構建機械手坐標系[3],如圖2所示。
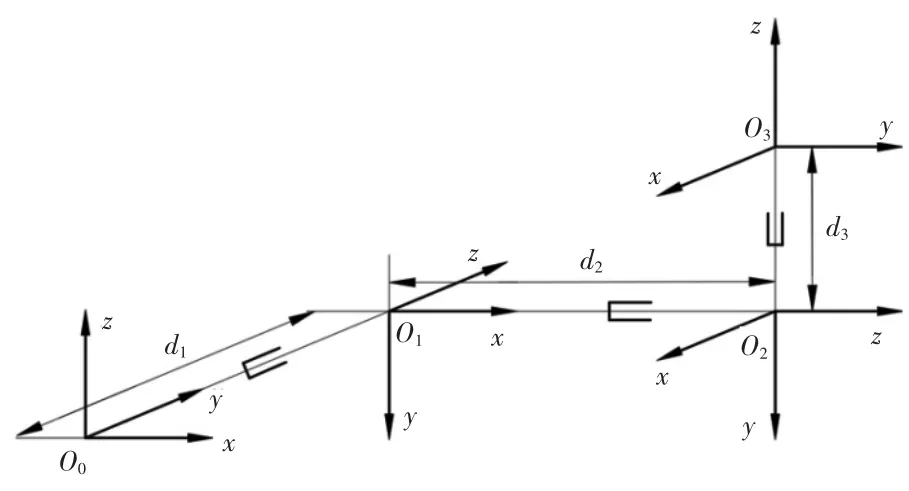
圖2 機械手坐標系
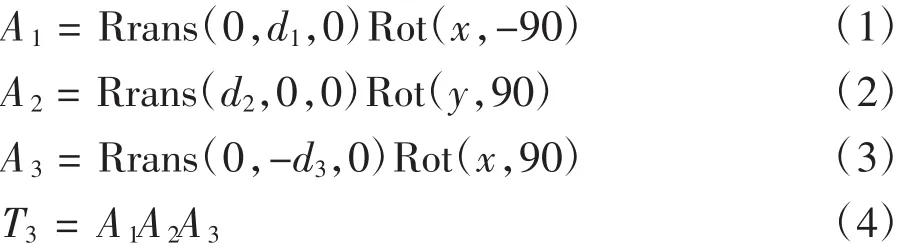
將工作軌跡的動點q坐標建在機械手末端執行器參考原點O3,則q點在O3坐標系的坐標為:

給定工作動點q的軌跡,求解其在基坐標系O0下q0與各個關節位移量,即可確定要是實現預定運動每個關節所要輸出的位移量。
2.2 由關節直線位移求解電機角位移
由于該機械手三自由度均由伺服電機提供動力,并采用了不同的傳動形式,為進一步求出電機輸出轉數,還要確定各個關節線性位移與電機轉數的關系。
X軸因采用絲杠傳動,因此電機輸出轉數與橫行機構平臺線性位移d1有以下關系:

其中p是滾珠絲杠導程,本文取值20 mm.
Y軸因采用同步帶傳動,因此電機輸出轉數n2與引拔機構平臺線性位移d2有以下關系:

其中r是同步帶輪節圓半徑,為40 mm.
Y軸因采用齒輪和齒條傳動,因此電機輸出轉數n3與手臂線性位移d3有以下關系:

其中m是齒輪和齒條的模數,為5 mm;z為齒輪齒數,為20.
3 基于ADAMS的仿真分析
3.1 機械手數字建模
ADAMS是機械運動學和動力學分析的有效工具,由于其三維建模功能較弱,因此先在solidworks中建模再導入ADAMS中。再按照機械運動類型添加構件之間的運動副,為減少計算量省略所有聯接類零件,無相對運動的零件均采取“Fixed Joint”配合,最終樣機如圖3所示。
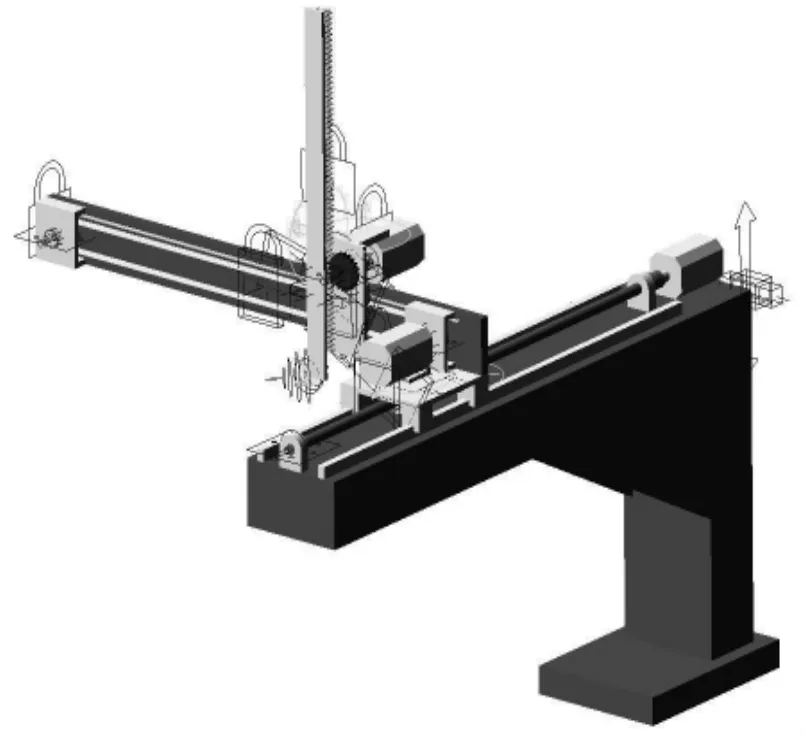
圖3 基于ADAMS構建機械手數字樣機模型
3.2 定義機械手末端路徑
利用ADAMS中“一般點驅動”和“樣條函數驅動”工具,可直接對機械手末端執行器的參考點定義驅動函數。由空間解析幾何可知空間螺旋線方程為:

其中a為螺旋線半徑,b為導程,T為周期,t為自變量,在ADAMS用time表示。
依據以上方程式,給機械手末端執行器參考點添加運動驅動,只需要給該點X,Y,Z三個方向的自由度輸入參數方程即可。本文a取值0.25,b取值0.08.需要說明的是,機械手的坐標原點不一定是運動的起始點,因此在建立一般點驅動之前要明確運動起始點。可利用建立參考坐標系的方法來指定該點,同時也可以利用次坐標來作為方程的參考坐標。例如本文中機械手初始運動起點即為(0.8,0.3,0.2)。
4 仿真結果分析
4.1 運動軌跡驗證
經過仿真計算后,輸出機械手末端執行器參考坐標軌跡,如圖4所示。由圖可知,運動軌跡為空間螺旋線,完全復合預定要求。
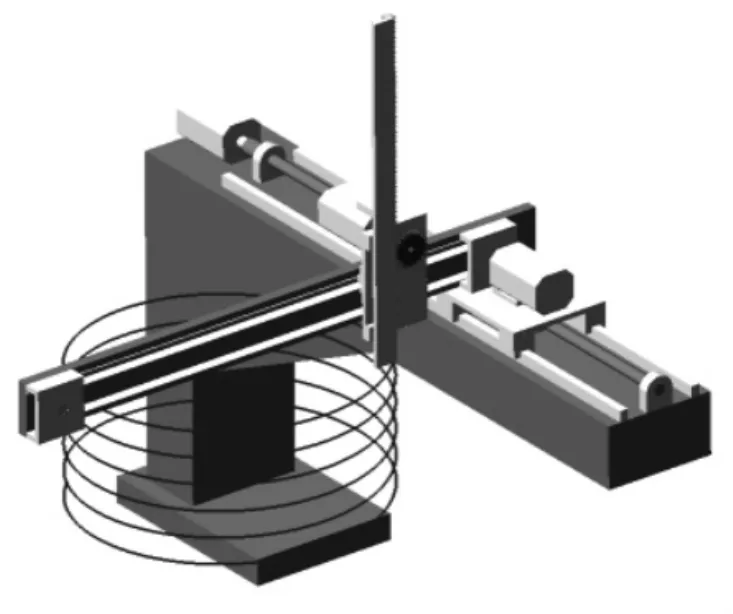
圖4 對手臂端點的軌跡跟蹤
4.2 關節位移與電機輸出分析
以軌跡起點為參考坐標原點查詢各關節的相對位移,分別建立三個關節的位移測量值,同時依據公式(8)、(9)、(10),由關節的線性位移計算出相應伺服電機轉數,輸出結果如圖5所示。
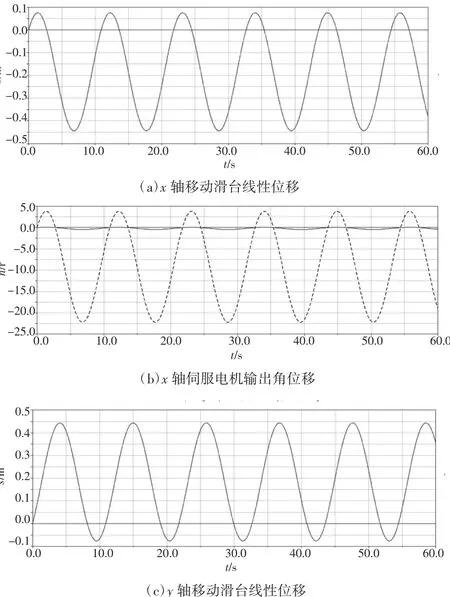
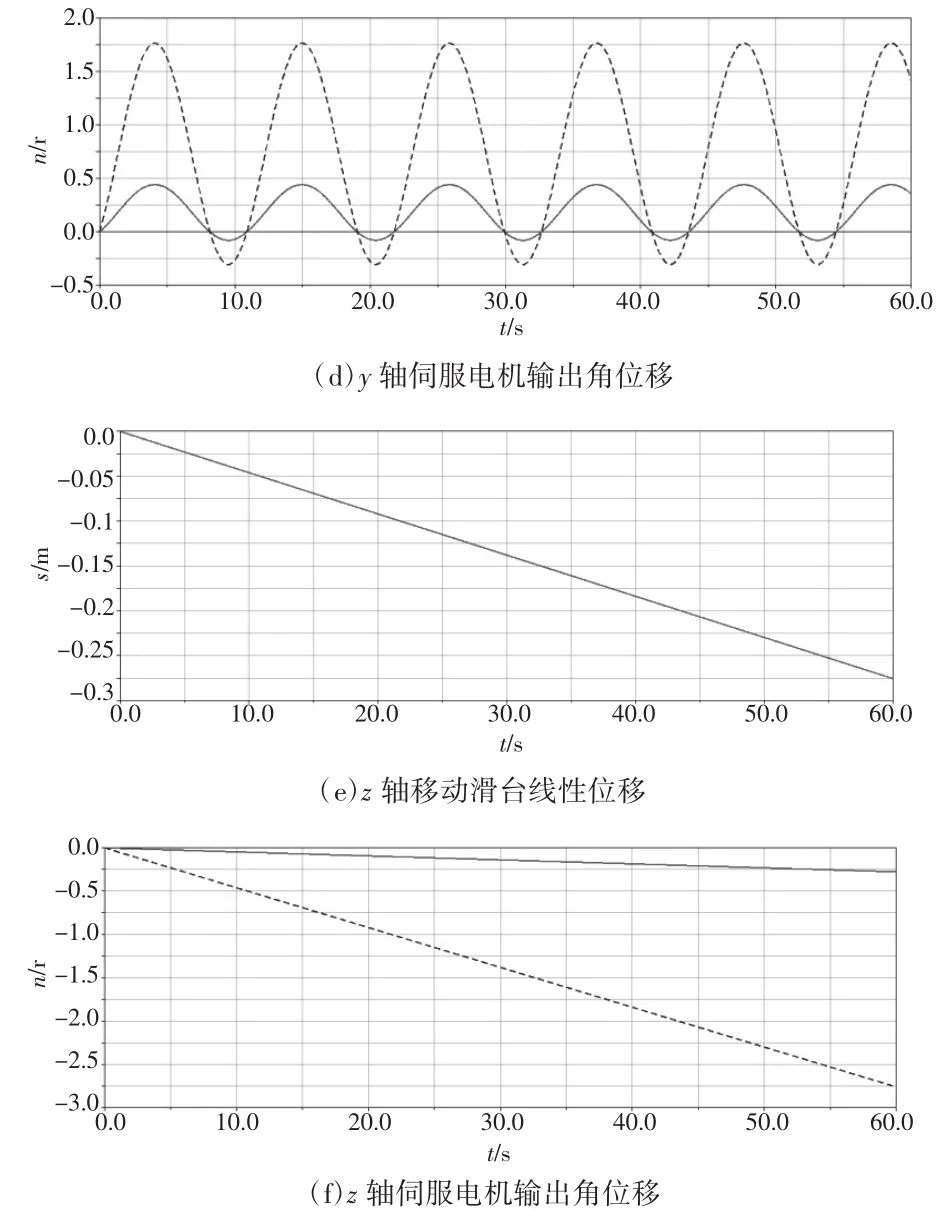
圖5 根據運動軌跡反求各電機輸入
以工作臺為對像查詢位移結果分析可知,機械手X軸方向線性位移d1和Y軸方向位移d2都以正弦規律直線運動,兩者頻率和幅值相同僅相差一個相位角。Z軸方向直線位移d3勻速直線向下運動,三者運動合成為空間螺旋線。
從電機運行的圖解來看,X軸的驅動電機輸入轉速相較于Y軸要快很多,這是由于絲杠的導程較小,使得其傳動比比同步帶要小。
4.3 機械手工作性能分析
基于仿真可以對該款機械手的工作性能有進一步的深入分析。由于X軸采用的滾珠絲杠,穩定性較高但當機械手執行動作范圍較大以及速度變化快的作業時,其電機的負荷比較重。Y軸采用同步帶驅動,傳動比大,響應速度快,但是由于皮帶屬于撓性件傳動,本身剛度低,在加減速階段慣性載荷較大的情況下,易發生振動,對機械手精度有一定影響。Z軸采用齒輪齒條,具有較好的綜合性能。綜上該機械手在執行具體工作時應該要結合其自身性能特點設計路徑。
5 結束語
本文對一款三自由度機械手做空間螺旋線路徑運動開展了規劃研究,先基于DH坐標法構建了機械的數學模型,再基于ADAMS仿真分析精確的獲得各軸電機的驅動規律,最后針對不同類型的傳動機構的分析了機械手運動特性,對機械手實施高精度的作業提供了建設性意見。基于數字仿真技術開展機器人的規劃研究,能避免復雜的矩陣計算,能快速精確的獲得動力學反問題的求解,這種思路和方法在實際生產中可顯著提高開發設計工作的效率和精度。
參考文獻:
[1]蔡自興.機器人學[M].北京:清華大學出版社,2009:50-53.
[2]梅江平,薛 娜,劉松濤,等.一種4自由度高速并聯機械手動態特性分析[J].天津大學學報(自然科學與工程技術版),2015,48(12):1083-1090.
[3]李海駐,胡志剛,郭利君,等.三自由度機械手的仿真研究[J].機械設計與制造,2014(10):186-189.
