純電動轎車關鍵部件建模與控制策略仿真
2018-04-02 07:29:33韓友國王若飛吳洪濤楊玉梅姚朝華
科技視界 2018年3期
韓友國 王若飛 陶 穎 吳洪濤 楊玉梅 姚朝華
(奇瑞新能源汽車技術有限公司,安徽 蕪湖 241002)
1 整車參數確定
按照本課題對電動汽車提出的設計目標、傳動系參考設計參數、動力性要求等,整車參數確定如下表:
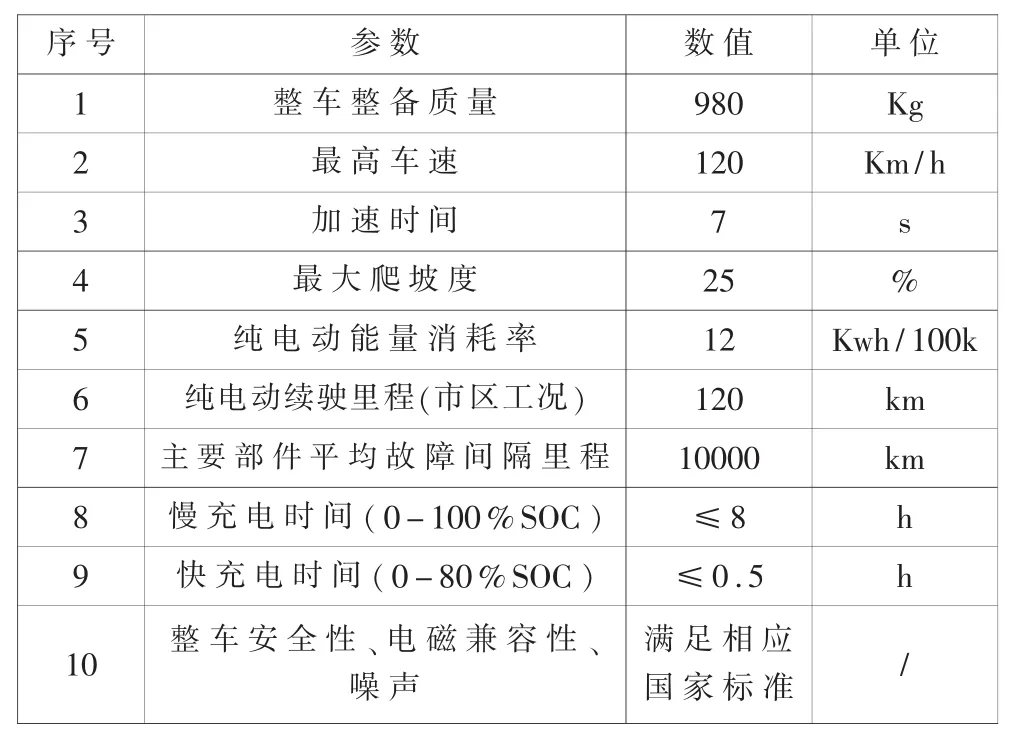
表1
2 電機模型建模
眾所周知,所建模型的正確性與精確性是計算機仿真開發成功的關鍵,而電機的轉矩、電壓、功率的運行特性方程和平衡方程是電動機建模的基礎。在使用計算機對電動機建模過程中,我們不僅考慮電動機內的熱交換,以及電動機性能的限制。還需要考慮不同類型電機所具有的特性。其中,所建模型是否符合基本的數學關系關乎模型的正確性、是否全面正確考慮到實物運行特性的影響因素關乎模型的精確性。在Matlab/Simulink平臺上實現實物的仿真分析,不僅需要模型,還需要編寫與其相配合運行的數據文件。電動機的數據文件定義了電動機的性能參數,如最大電流、最大電壓、質量及轉動慣量等,還定義了電機在不同工作狀態下的轉矩、轉速、功率圖。在仿真分析運行過程中模型利用插值計算的方法;調用數據文件以實現電動機的工作過程仿真。電機順序系統如圖1所示。
3 電池模型建立
本文根據鋰電池充、放電過程的特性,建立電池模型,不考慮溫度的變化,極化反應對電池的影響,建立最簡單的單體電池等效電路Rint模型,。在不考慮各個單體電池的充放電差異時,建立整個電池組模塊的模型如圖 2。
4 整車驅動控制策略
車輛控制器需要通過信號處理,以分析駕駛員意圖,同時需要滿足整車的動力性、舒適性、駕駛平順性、以及其他基本性能。控制策略的選擇必須滿足以上基本前提。進一步地,合適的控制策略需要實現車輛在不同運行工況時,能量在電池與電機之間的合理且有效的分配,以控制整車系統的效率,在保證平穩駕駛性能的基礎上,實現整車的最大經濟性。基于以上基本原則,制定整車控制策略的思路為:首先,實時考慮行駛工況,電池SOC值等影響因素,根據規則將轉矩合理地分配給電機。同時限定動力電池的SOC值范圍和電機的工作區域,以確保動力電池和電機能夠長時間保持高效的狀態。當行駛過程中出現問題時,系統可根據預先設定的規則對純電動車輛系統的工作模式進行判斷和選擇。這樣既能保證駕駛員的駕駛意圖得到充分理解,亦能保證車輛狀態在有效控制范圍內,從而保證車輛行駛的安全性和舒適性。
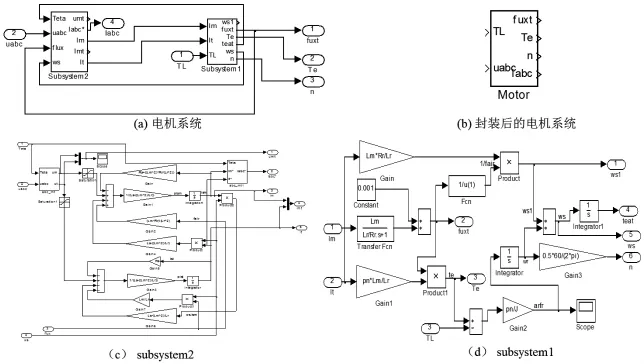
圖1 電機順序系統
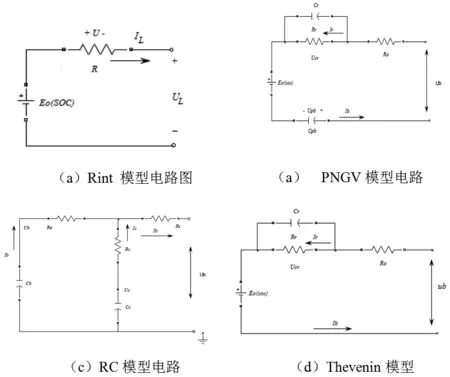
圖2 等效電路模型
5 加速轉矩控制策略
我們知道,整車駕駛的動力性和舒適性主要取決于加速轉矩控制策略,而不同的加速轉矩控制策略取決于加速踏板開度與加速轉矩函數關系。我們知道,加速踏板處理策略一般分為三種:踏板策略、軟踏板策略、線性踏板策略。其中硬踏板策略可以滿足駕駛員在中高負荷時的駕駛感覺,缺點時在低負荷時操控性欠佳。軟踏板策略在低負荷時操控性較好,但車輛加速感整體偏軟。而線性踏板策略,控制效果介于踏板策略和軟踏板策略之間,但該策略函數關系復雜,計算量較大。
6 制動能量回饋控制策略
作為電動汽車(包括純電動車、混合動力車和插電式燃料電池車)的標志性功能,制動能量回饋控制的原則是:最大程度提高能量回饋的同時,確保機械制動與電制動的協調控制,從而保證汽車制動力的要求。由于本項目中機械制動系統不可調整,因此僅實施了純軟件的輕度制動能量回饋控制策略。
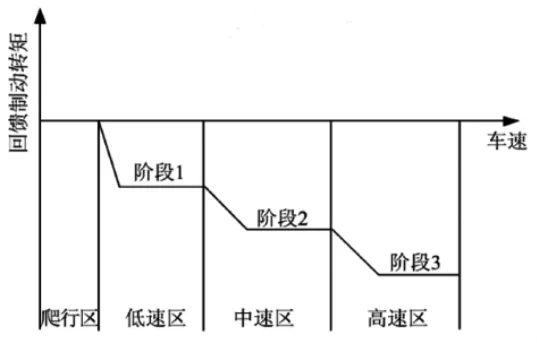
圖3 回饋制動轉矩控制示意圖
如圖3所示,在車速很低的爬行區,回饋能量與回饋路徑能量損耗保持一致,回饋效率非常低,同時如果進行能量回饋將明顯影響制動性,因此該階段不建議進行能力回饋。為不影響駕駛員制動感覺,低速區,由于電機具有一定的轉速,因此可以較低的制動轉矩進行能量回饋;而在高速區時,可使用較高制動轉矩進行能量回收。通常使用該策略時,具體數值需要通過實車標定得到。同時,為了保護動力電池,回饋電流必須滿足電池當前的最大允許能力。
7 仿真測試
電動汽車起步過程、電動汽車加速、制動過程的仿真結果如圖4所示。
圖5為利用xPC的在線調參功能對仿真模型進行仿真過程中的參數進行實時控制的仿真結果。仿真過程中,在宿主機上,利用圖形用戶接口,在程序實時運行的過程中,實時調整界面上的油門踏板和制動踏板信號,跟蹤目標驅動循環,調節輸出的汽車速度仿真結果。結果表明,程序的仿真步長采用1ms,在此時間間隔內,所有的仿真模型程序運行一個周期。由于,在車上的通信周期采用的是 50ms。
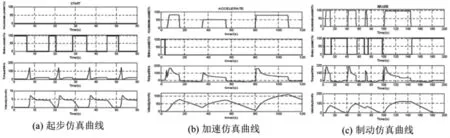
圖 4 (a)起步仿真曲線;(b)加速仿真曲線;(c)制動仿真曲線
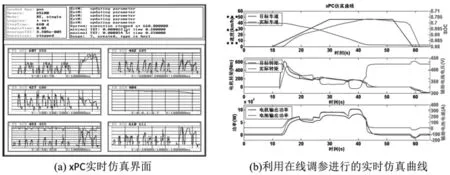
圖5 (a)xPC實時仿真界面;(b)利用在線調參進行的實時仿真曲線
通過建立電動機模型、電池模型,對整車驅動控制策略、加速轉矩控制策略、制動能量回饋控制策略進行分析研究,并且基于Simulink以及xPC進行仿真測試驗證模型和控制策略準確性。
8 總結
本文以某款純電動轎車作為研究對象,根據設計指標以及給定的基本參數,對純電動轎車動力系統進行了選型和匹配。分析純電動汽車整車控制系統功能,根據動力電池組荷電狀態和行駛工況,協調電機控制器與電池管理系統,實現動力電池組各種保護措施,提高動力電池的安全性和壽命;同時還負責整車高壓防護、漏電檢測、故障診斷及處理等功能。
【參考文獻】
[1]王星剛.純電動汽車驅動系統優化及分析策略[J].汽車與配件,2012(50).
[2]侯澤躍.純電動汽車轉矩控制策略的研究[J].中國高新技術企業,2012(30).
[3]秦大同,周孟喜,胡明輝,胡建軍,陳淑江.電動汽車的加速轉矩補償控制策略[J].公路交通科技,2012(05).
[4]周兵,江清華,楊易.兩擋變速器純電動汽車動力性經濟性雙目標的傳動比優化[J].汽車工程,2011(09).
[5]陳曉麗,陳文強,曲毅.純電動汽車驅動電機的設計[J].汽車與配件,2011(35).
[6]王若飛.增程式電動客車參數匹配及控制策略研究[J].上海汽車,2015(1).
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
黃河之聲(2019年23期)2019-12-17 19:08:43
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
汽車實用技術(2019年17期)2019-09-21 03:46:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
數學大世界(2018年1期)2018-04-12 05:39:14
黃河之聲(2017年13期)2017-01-28 13:30:17