電控小車方案設(shè)計(jì)比選
2018-03-30 02:52:42馬曉欣馮小東
現(xiàn)代制造技術(shù)與裝備 2018年4期
馬曉欣 馮小東 康 凱
(河北建筑工程學(xué)院,張家口 075000)
1 競賽介紹
1.1 競賽命題
競賽命題為“重力勢能驅(qū)動的自控行走小車越障競賽”。筆者自主設(shè)計(jì)一種符合本命題要求的小車,經(jīng)賽場內(nèi)外分步制作完成,并進(jìn)行現(xiàn)場競爭性運(yùn)行考核。下面將重力勢能驅(qū)動的自控行走小車簡稱電控小車。
1.2 命題要求
小車:三輪結(jié)構(gòu),其中一輪為轉(zhuǎn)向輪,另外二輪為行進(jìn)輪,(要求2個行進(jìn)輪用1.5mm厚度的鋼板或可用激光切割加工且不超過8mm厚度的非金屬板制作,要求行進(jìn)輪輪轂與輪外緣之間至少有40mm的環(huán)形范圍,這個范圍將用于進(jìn)行統(tǒng)一要求的設(shè)計(jì)和激光切割),允許二行進(jìn)輪中的一個輪為從動輪。小車可具有賽道障礙識別、軌跡判斷及自動轉(zhuǎn)向功能和制動功能,這些功能可由機(jī)械或電控裝置自動實(shí)現(xiàn),不允許使用人工交互遙控,如圖1所示。

圖1 小車示意圖
小車行進(jìn)所需能量:只能來自給定的重力勢能,小車出發(fā)初始勢能為400mm高度×1kg砝碼質(zhì)量,競賽時使用的同一規(guī)格標(biāo)準(zhǔn)砝碼(鋼制Φ50mm×65mm)。若使用機(jī)械控制轉(zhuǎn)向或剎車,其能量也需來自上述給定的重力勢能。
電控裝置:主控電路必須采用帶單片機(jī)的電路,電路的設(shè)計(jì)及制作、檢測元器件、電機(jī)(允許用舵機(jī))及驅(qū)動電路自行選定。電控裝置所用電源為5號堿性電池,電池自備,比賽時須安裝到車上并隨車行走。小車上安裝的電控裝置必須確保不能增加小車的行進(jìn)能量。
1.3 賽道
賽道寬度1.2m,形成長約15.4m、寬約2.4m(不計(jì)賽道邊緣道牙厚度)的環(huán)形賽道,其中兩直線段長度為13.0m,兩端外緣為曲率半徑為1.2m的半圓形,中心線總長度約30m,如圖2所示。
賽道邊緣設(shè)有高度為80mm的道牙擋板。賽道上間隔不等(隨機(jī))交錯設(shè)置多個障礙墻,障礙墻高度約80mm,相鄰障礙墻之間最小間距為1m,每個障礙墻從賽道一側(cè)邊緣延伸至超過中線100~150mm。
在直賽道段設(shè)置有1段坡道,坡道由上坡道、坡頂平道和下坡道組成,上坡道的坡度3°±1°,下坡道的坡度1.5°±0.5°;坡頂高度40±2mm,坡頂長度為250±2mm。坡道位置將事先公布,出發(fā)線在平賽道上,距離坡道起始位置大于1m,具體位置抽簽決定。
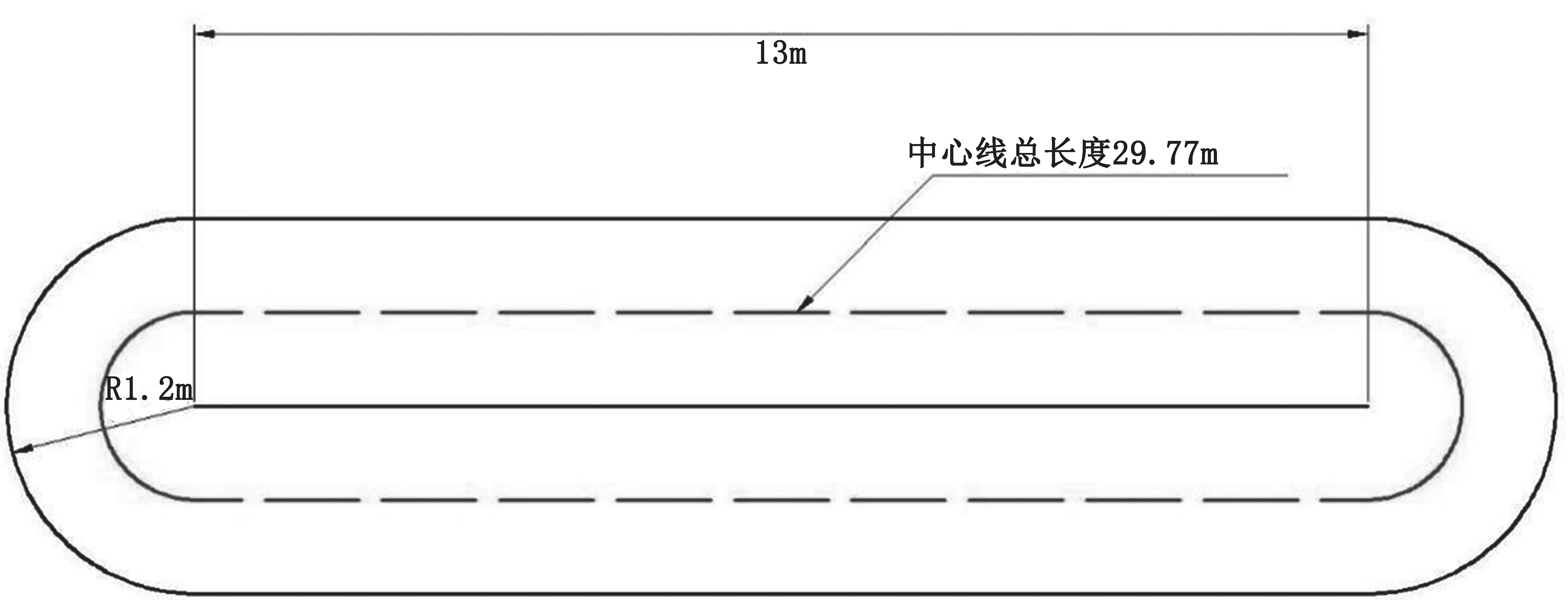
圖2 賽道示意圖
2 方案比較
2.1 傳動及變力矩方案
2.1.1 多級傳動
多級傳動是指在提吊重塊的繩索和車輪軸之間還有傳動介質(zhì)(形式)的傳動,通過改變多級傳動的傳動比來改變驅(qū)動力矩。多級傳動的中間傳動介質(zhì)增加了能量的消耗,傳動效率較直接驅(qū)動低。
2.1.2 直接驅(qū)動
直接驅(qū)動是指重塊下落的重力勢能直接通過提吊重塊的繩索驅(qū)動車輪軸實(shí)現(xiàn)轉(zhuǎn)動的傳動結(jié)構(gòu)方案,通過錐形繞線輪來改變驅(qū)動力矩。直接驅(qū)動的特點(diǎn)是能量損耗小,傳動效率高。
2.2 車輪驅(qū)動方案
2.2.1 前輪驅(qū)動方案
車輪布局為前面兩個輪、后面一個輪的三角形結(jié)構(gòu),此結(jié)構(gòu)前車輪為驅(qū)動輪,后車輪為轉(zhuǎn)向輪,前車輪可采用任意一個車輪為主動輪,另一個為從動輪;也可以采用差速器結(jié)構(gòu),兩輪均為主動輪。有差速器的結(jié)構(gòu),左右轉(zhuǎn)向速度一致,沒有差速器的結(jié)構(gòu),左右轉(zhuǎn)向速度變化大,有差速器的結(jié)構(gòu)轉(zhuǎn)彎運(yùn)行更加平穩(wěn)。
2.2.2 后輪驅(qū)動方案
車輪的布局為前面一個轉(zhuǎn)向輪、后面兩個驅(qū)動輪的三角形結(jié)構(gòu),此結(jié)構(gòu)后車輪為驅(qū)動輪,前車輪為轉(zhuǎn)向輪,后車輪可采用任意一個車輪為主動輪,另一個為從動輪;也可以采用差速器結(jié)構(gòu),兩輪均為主動輪。
2.3 避障尋跡方案
2.3.1 沿一側(cè)尋跡方案
該方案通過傳感器檢測前方和一側(cè)的障礙物,將信號反饋給單片機(jī),由單片機(jī)控制舵機(jī)轉(zhuǎn)向即可實(shí)現(xiàn)避障,對于傳感器的數(shù)量需求少,編程也較中間尋跡方案簡單。小車每避過一個障礙所行走距離長。
2.3.2 中間尋跡方案
該方案需要傳感器檢測前方和兩側(cè)的障礙物,同樣將信號反饋給單片機(jī),由單片機(jī)控制舵機(jī)轉(zhuǎn)向即可實(shí)現(xiàn)避障,對于傳感器的數(shù)量需求多,編程也相對復(fù)雜一些。小車每避過一個障礙所行走距離與沿一側(cè)尋跡方案相比要短。
2.4 轉(zhuǎn)向機(jī)構(gòu)方案
2.4.1 機(jī)械傳動結(jié)構(gòu)控制方案
該方案傳動結(jié)構(gòu)與舵機(jī)控制方案相比,具有結(jié)構(gòu)復(fù)雜的特點(diǎn),增加了電控小車的整體重量。不使用重塊的重力勢能驅(qū)動,需要用到電機(jī)或者舵機(jī)等電力驅(qū)動裝置。使用重塊的重力勢能驅(qū)動,消耗了小車向前行走的一部分能量,降低了小車的行走距離。
2.4.2 舵機(jī)控制方案
采用舵機(jī)控制轉(zhuǎn)向輪的轉(zhuǎn)角,結(jié)構(gòu)簡單,控制方便,轉(zhuǎn)向機(jī)構(gòu)不消耗重塊的重力勢能,轉(zhuǎn)向節(jié)省的重塊勢能能量將用于小車行走。
2.5 剎車結(jié)構(gòu)方案
2.5.1 機(jī)械控制剎車方案
該方案剎車消耗小車的重塊的重力勢能,小車需要的剎車一般處于下坡路段,小車的行走可靠車身的自重來驅(qū)動,此剎車結(jié)構(gòu)增加小車結(jié)構(gòu)的復(fù)雜程度。
2.5.2 電磁剎車方案
與機(jī)械剎車方案相比,該方案結(jié)構(gòu)更加簡單。電磁剎車的力需要克服小車自重和重塊重力勢能的驅(qū)動力之和,需要考慮5號堿性電池的能量大小。
3 方案選擇
通過以上方案的比較,電控小車的傳動方案宜選擇直接驅(qū)動方案,前輪驅(qū)動和后輪驅(qū)動均可,應(yīng)該加裝簡易差速器,采用按照中間路線行走的方案,可以提高小車的避障礙數(shù)量。轉(zhuǎn)向機(jī)構(gòu)采用直接用舵機(jī)控制轉(zhuǎn)向的方案,在電池能量滿足轉(zhuǎn)向和剎車力的情況下,優(yōu)先選擇電磁剎車方案。該方案能量損失較小,行走距離較長,避障平穩(wěn)且數(shù)量較多。
4 結(jié)語
進(jìn)行電控小車方案設(shè)計(jì)比選,為電控小車的設(shè)計(jì)和方案選擇提供了參考和借鑒。
