基于電機直驅的玉米播種機控制系統的設計
2018-03-28 00:49:50刁培松程衛東
農機化研究 2018年3期
賈 昊,刁培松,程衛東,張 將
(山東理工大學 農業工程與食品科學學院,山東 淄博 255049)
0 引言
從目前已通過省部級鑒定和大量推廣應用的播種機看,主要分為氣力式和機械式兩大類。從結構形式來看,氣力式排種器有氣吸式、氣壓式、氣吹式及氣力與機械組合式達10 余種之多;機械式排種器更是種類繁多,常用的有垂直圓盤側充式、水平圓盤、傾斜圓盤、窩眼輪式和窩眼刷種輪式等30余種。國外發達國家對精密播種機播種的研究起步比較早,20世紀80年代中期,國外農業研究人員便開始研究電子控制的排種裝置,目前國外關于電子控制的排種裝置的研究日益成熟,已經開始廣泛推廣。現階段國內對于精密播種機的研究與發達國家相比還有一定差距,且大部分研究多集中在故障監測及報警方面,而精密播種機因地輪打滑造成的不均勻播種問題仍未得到解決。雖然已經研發了部分排種控制系統,但其在實用化方面還存在很多問題,特別是基于電機驅動的播種機排種控制和基于計算機系統的排種器性能監測成為提高播種機作業質量的關鍵,也是今后對播種機研究的主要方向。
目前,國內傳動變速結構落后,調節使用不便:一是大多數播種機仍采用鐵制剛性地輪驅動,且直徑偏小,滑移率高; 二是傳動軸支撐多采用普通軸承或滑動軸承,傳動不靈活,阻力大; 三是傳動變速( 株距調節) 多采用更換鏈輪方式,變速調節不便。電動執行機構特點:①體積小、動作快反應快、過載能力大、調速范圍寬;②低速力矩大, 波動小,運行平穩;③低噪音,高效率;④后端編碼器反饋(選配)構成直流伺服等優點;⑤變壓范圍大,頻率可調[1-3]。
1 控制系統總體方案設計
本株距自適應玉米免耕播種機由車載觸控、導航移動站、控制盒、終端盒、伺服無極變速器和播種單體構成,如圖1所示。
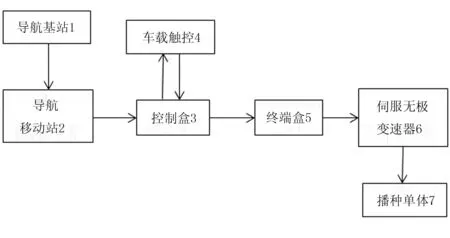
圖1 方案設計Fig.1 Scheme and design
工作時,由移動站接受來自基站的報文,并將報文傳遞到控制盒內的可編程控制器(PLC);PLC將報文中的位置與速度信息讀取并存儲,通過車載觸控輸入的數據與控制器不同的算法向終端盒發送指令;同時,PLC將各種信息傳回車載觸控顯示給用戶,可編程控制器(PLC)控制伺服無極變速器依據行進速度改變播種單體的播種盤轉速,從而達到變量播種的目的。本播種機具有體積小、動作快反應快、過載能力大、調速范圍寬、波動小、運行平穩、低噪音,以及高效率等特點。播種機的有益效果是能夠通過現有的導航確定播種機的播種速度與位置,實現播種株距自適應的目的,大大提高了農業現代化水平,方案設計如圖1所示。
1.1 控制系統方案
控制系統包括車載觸控、移動站、控制盒與伺服無極變速系統。
基站發來的報文信息通過移動站接受并發送給控制盒,控制盒內的可編程控制器(PLC)進行讀取并存儲在響應的寄存器內;車載觸控讀取對應寄存器內的數據并顯示在界面,可編程控制器(PLC)將速度信號進行處理得出電機轉速,傳遞到各個播種單體上的驅動盒進而調節電機轉速,實現株距自適應播種。
1.2 主要性能指標和工作參數
控制系統主要性能指標和工作參數,如表1所示。
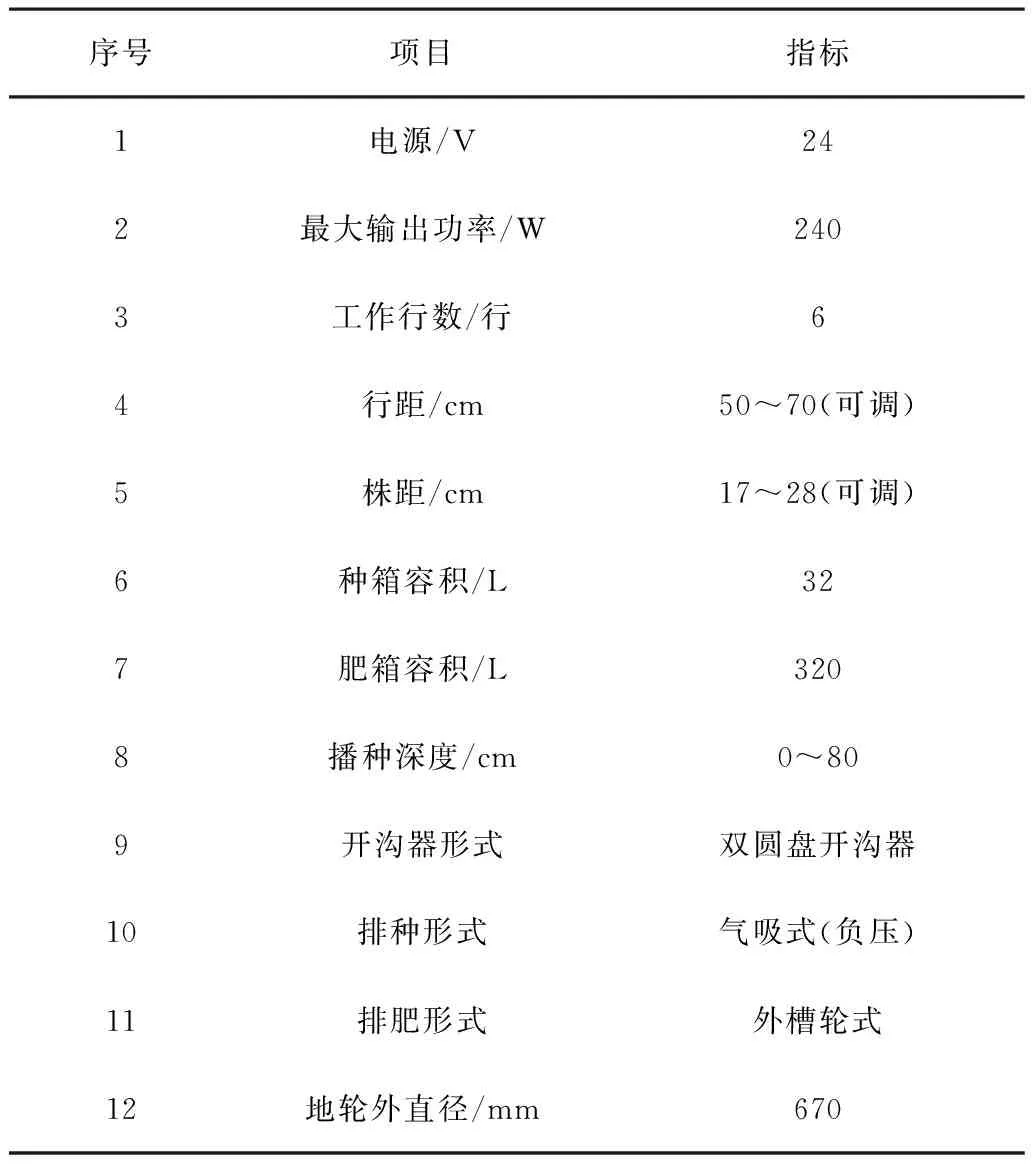
表1 主要性能指標和工作參數Table 1 Main performance and operating parameters
2 基于電機直驅的排種方案設計
對于單個氣吸式排種器,由獨立的伺服電機驅動,伺服電機轉速與拖拉機行駛速度動態匹配,同時根據畝播量,保證播種株距恒定。方案布置圖如圖2所示。

1.伺服電機 2.光電傳感器 3.電機驅動器 4.排種盤 圖2 玉米播種機單體Fig.2 Units of corn planter
2.1 電機驅動基本原理
該株距自適應系統,采用“北斗+地輪”雙通道互補測速系統測速,拖拉機速度信號通過可編程控制器(PLC)轉換為伺服電機的脈沖信號,在伺服電機轉速與拖拉機行駛速度之間建立一定的關系模型,使伺服電機的轉速隨著拖拉機速度的變化而變化;伺服電機驅動排種盤,使排種盤轉速隨拖拉機行駛速度動態變化,從而保證株距不隨拖拉機行駛速度的變化而變化,實現株距的動態自適應。
PLC在每行的起點與終點分別讀取經緯度信號,并將其存儲在響應的寄存器中,進行數據轉換并結合作業幅寬計算相應的播種面積。安裝在排種盤上的光電傳感器,將光電信號轉換成電信號通過可編程控制器傳遞到觸控屏,在觸控屏上顯示相應的信息與報警,實現智能漏播監控報警。
2.2 速度信號的獲取
舊驅動方式主要采用地輪驅動,在低速行駛下滑移率較小、可靠度高;在高速作業下滑移率較大,易產生漏播等現象。而通過導航測速可以避免由地輪滑移率較高造成的漏播等現象;因導航精度所限,在低速行駛的情況下,誤差略大。
綜合兩種形式的優缺點,設計了“北斗+地輪”雙通道互補測速系統:在低速行駛時采用地輪測速,當作業速度達到一定速度以上時,切換到北斗測速。這樣既避免了地輪高速作業的滑移率較大的問題,也改善了低速作業下精度不夠的問題。方案如圖3所示。
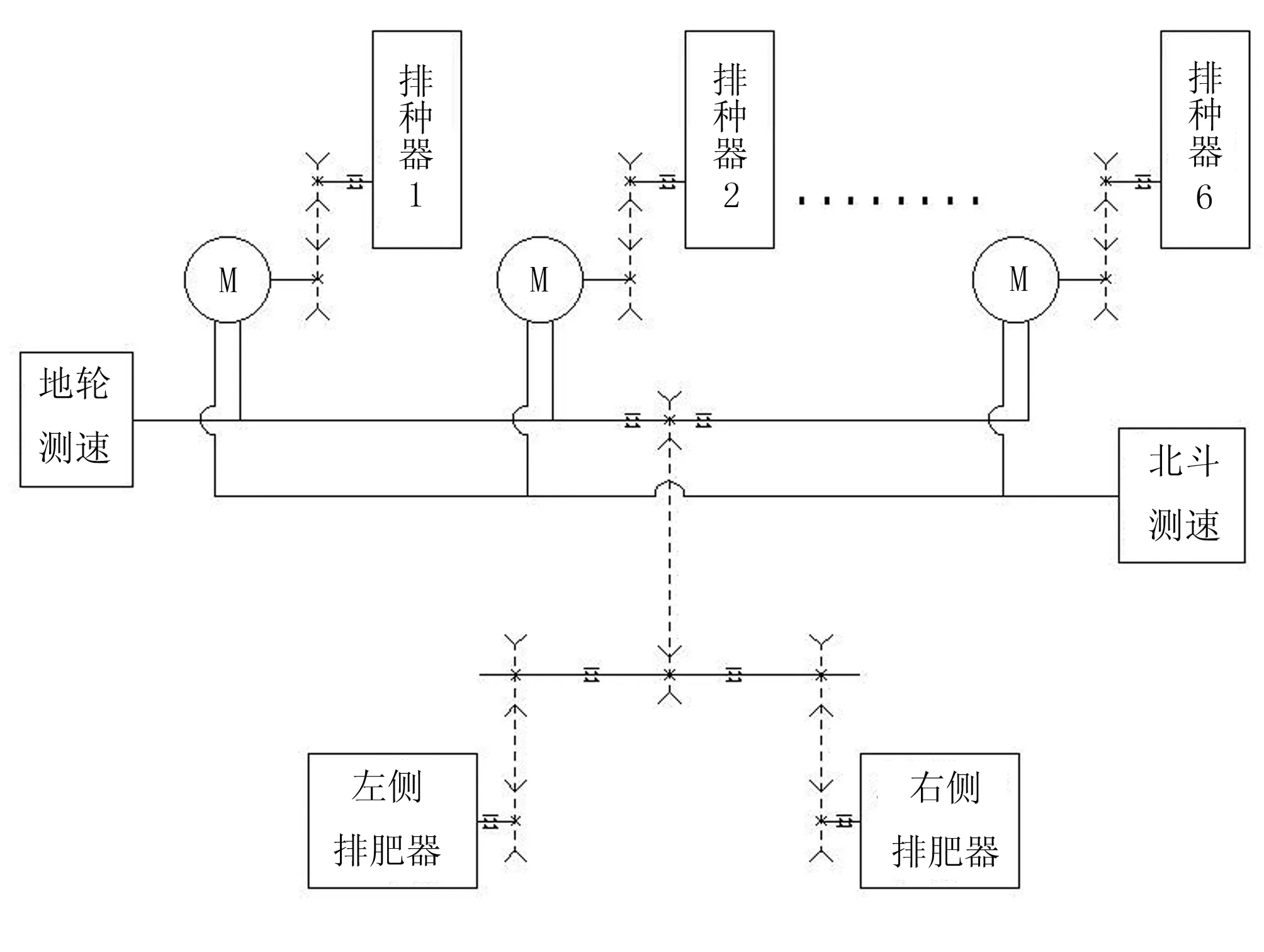
圖3 基于電機直驅的排種器驅動方案Fig.3 The seed metering based on driver by servo motor
通過地輪讀取速度信息,在地輪的傳動軸上裝有旋轉編碼器,作業時地輪著地帶動傳動軸旋轉,旋轉編碼器讀取到傳動軸的轉速傳到控制盒中的可編程控制器(PLC)中。當通過導航系統讀取速度信息時,先獲取報文信息。報文格式如下:
$GPGGA,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,M,<10>,M,<11>,<12>*xx
$GPGGA:起始引導符及語句格式說明;
<1> UTC時間,格式為hhmmss.sss;
<2> 緯度,格式為ddmm.mmmm(第一位是零也將傳送);
<3> 緯度半球,N或S(北緯或南緯);
<4> 經度,格式為dddmm.mmmm(第一位零也將傳送);
<5> 經度半球,E或W(東經或西經);
<6> GPS狀態,0初始化,1單點定位,2碼差分,3無效PPS,4固定解,5浮點解,6正在估算,7人工輸入固定值,8模擬模式,9WAAS查分;
<7> 使用衛星數量,從00到12(第一個零也將傳送);
<8> 水平精度因子,0.5到99.9;
<9> 天線離海平面的高度,-9999.9到9999.9米,M 指單位米;
<10> 大地水準面高度,-9999.9到9999.9米M 指單位米;
<11> 差分GPS數據期限(RTCM SC-104),最后設立RTCM傳送的秒數量,如不是差分定位則為空;
<12> 差分參考基站標號,從0000到1023(首位0也將傳送)。地面速度信息。
(GPVTG)$GPVTG,<1>,T,<2>,M,<3>,N,<4>,K,<5>*hh
<1> 以真北為參考基準的地面航向(000~359度,前面的0也將被傳輸);
<2> 以磁北為參考基準的地面航向(000~359度,前面的0也將被傳輸);
<3> 地面速率(000.0~999.9節,前面的0也將被傳輸);
<4> 地面速率(0000.0~1851.8公里/小時,前面的0也將被傳輸);
<5> 模式指示(僅NMEA0183 3.00版本輸出,A=自主定位,D=差分,E=估算,N=數據無效可編程控制器將接受到的報文格式存儲到指定的寄存器中,再從特定的寄存器中讀取數據。
2.3 株距建模
播種機是由電機帶動播種盤轉動的,株距跟行進速度應保持一定關系,以達到在速度變化時株距恒定不變。則
(1)
式中D—播種行距(cm);
L—每畝(667m2)寬為D的地塊長度。
(2)
式中d—播種株距(cm);
N—每畝(667m2)地的播種株數。
(3)
式中v—拖拉機行進速度(km/h);
n—伺服電機轉速。
由上式可知
(4)
經過上述計算可得出在畝株數一定的情況下,行進速度與電機轉速對應關系,如表2所示。
控制器將轉速信號傳遞到播種單體電機的控制盒內,以達到播種轉速隨行進速度變化而變化,從而達到播種株距恒定不變。
2.4 上位機與車載觸控
車載觸控在前車駕駛室內,通過RS485總線與控制盒相連。觸控屏上可以輸入播種量、行距與施肥量,從寄存器內讀取株距和行進速度等,再在觸控屏上顯示。觸控屏界面設計如圖4所示。
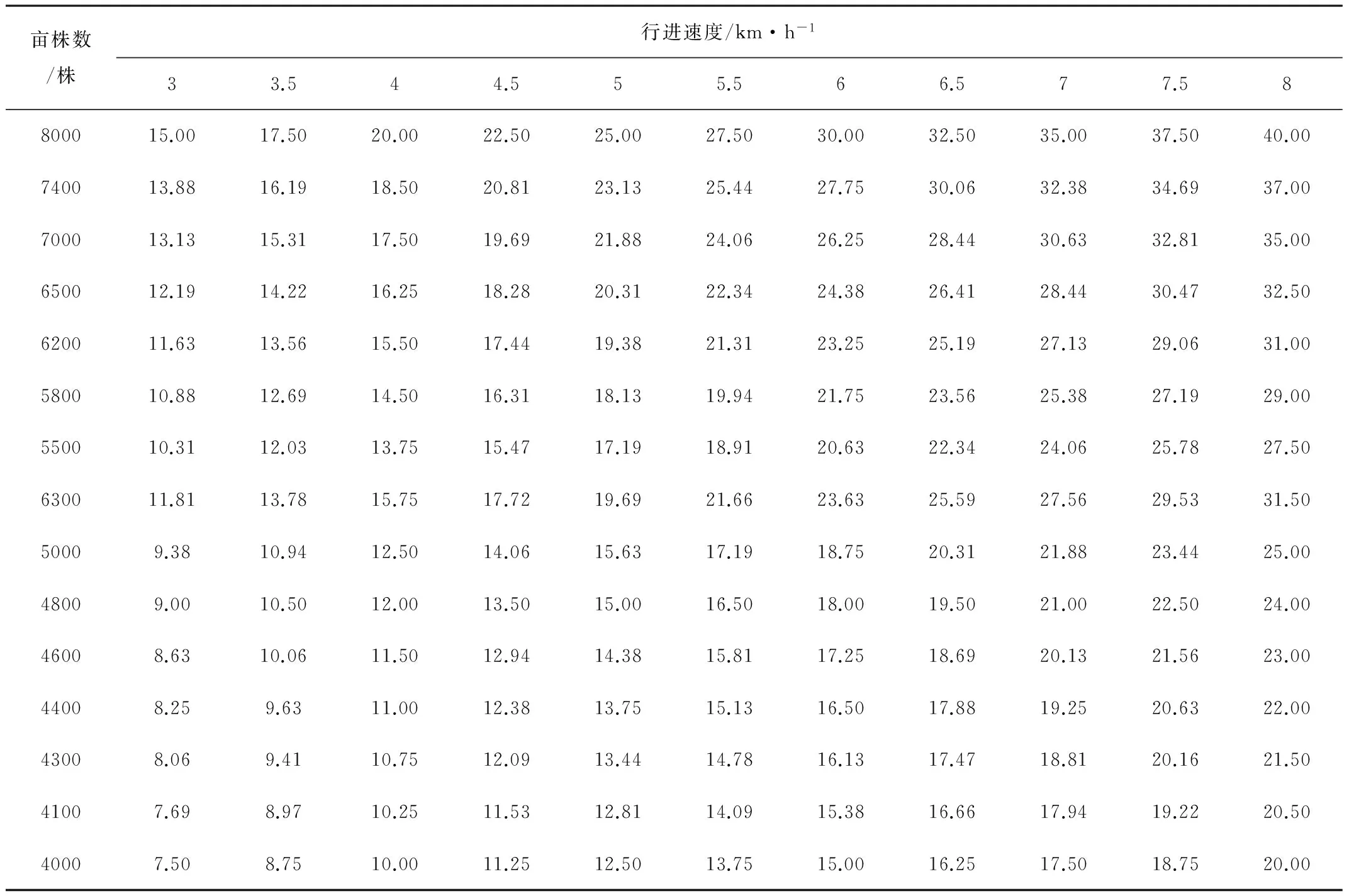
表2 不同行進速度與播量條件下電機對應轉速 Tab.2 Motor speed corresponding to different speed and sowing rate r/min

圖4 觸控屏界面Fig.4 Touch screen interface
3 田間試驗
3.1 試驗條件
間性能試驗分別在淄博臨淄鳳凰鎮富群農機合作社進行,秸稈覆蓋量≥40%,秸稈切碎長度合格率≥85%、殘茬覆蓋量為0.3~0.6kg/m2(秸稈含水率≤25%),配套動力≥89kW。
3.2 試驗結果
通過上文的設計方法得出的精密播種機相關參數,按照所得參數對精密播種機進行樣機制作,如圖5所示。

圖5 株距自適應播種機樣機Fig.5 Adaptive spacing corn planter prototype
淄博市農業機械科學研究院對該機的粒距合格指數、合格粒距變異系數、漏播率及偏離距離等主要性能指標進行了檢測,均優于行業標準指標。試驗檢測結果如表3所示。
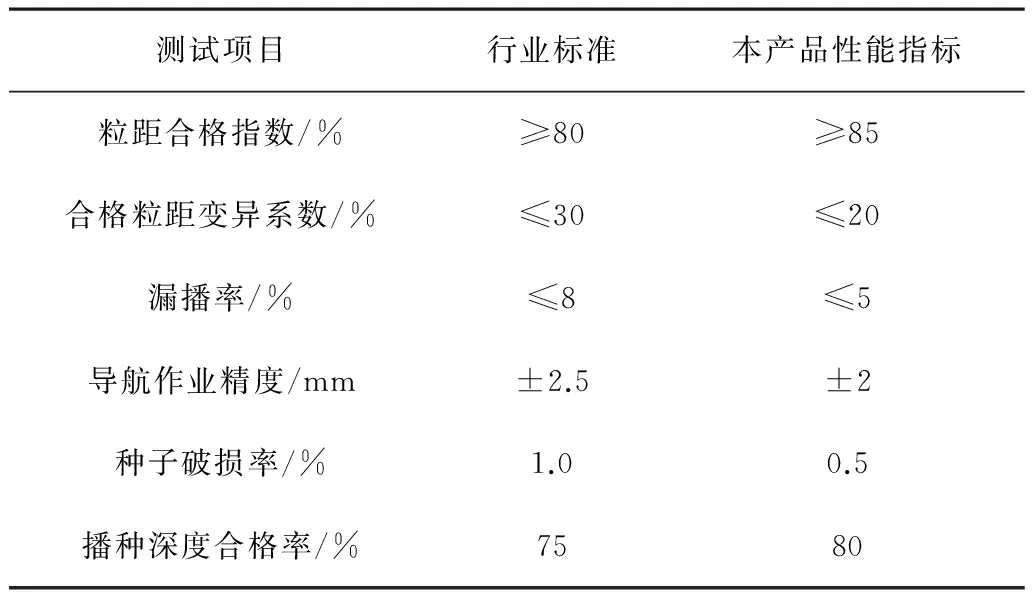
表3 試驗檢測結果Table 3 Testing results of the corn planter
4 結論
試驗證明:采用氣吸式精量玉米免耕播種機,播種株距穩定,行進直線度高,產量可提高5%~10%,減少了作業量,大大提高了效率,解決了作業行進直線度不高,株距不穩定等問題。其主要技術指標達到國外同類產品先進水平,具有廣闊的發展前景,推動了我國電動式氣吸精量玉米免耕播種機技術的發展。
[1] 張波屏.播種機械設計原理[M].北京:機械工業出版社,1982:288-291.
[2] 張德文,李林,王惠民.精密播種機械[M].北京:中國農業出版社,1982:42-53.
[3] 馬成林,陳曉光,左春檉,等.播種機械土壤工作部件基本特性的研究[J].農業工程學報,1992,12(4):41-42.
[4] 高煥文,李問盈,李洪文.中國特色保護性耕作技術[J].農業工程學報,2003,19(3):14.
[5] 朱光明,楊林,李洪文.2BQMF5型氣吸式施肥免耕播種機的設計與試驗[J].農機化研究,2008(7):84- 86.
[6] 尤曉東,張旭,劉忠澤,等.2BQM-2型免耕氣吸播種施肥機的研制與試驗[J].農機化研究, 2009,31(7):38-40.
[7] 李林.氣吸式排種器理論及試驗的初步研究[J].農業機械學報,1979,10(3):56-63.
[8] GB/T 19392-2013車載衛星導航設備通用規范[S].
[9] 陳志.農業機械設計手冊[K].北京:中國農業科學技術出版社,2007:303-314.
