基于多跳無線網(wǎng)絡(luò)和機器視覺的新式采摘機器人設(shè)計
2018-03-28 00:49:47谷利芬
農(nóng)機化研究 2018年3期
谷利芬,謝 芳
(焦作師范高等專科學(xué)校 計算機與信息工程學(xué)院,河南 焦作 454000)
0 引言
隨著農(nóng)業(yè)采摘需求日益增長,國內(nèi)外的專家和學(xué)者早在20世紀80年代就開始投入到采摘機器人的研究熱潮中,到目前為止,多款機器人已經(jīng)研發(fā)出來,如西紅柿、黃瓜、獼猴桃等對采摘要求較高的機器人;但是,這些機器人尚未實現(xiàn)商品化生產(chǎn)[1-2]。我國是農(nóng)業(yè)大國,對采摘機器人的需求量較大,在采摘機器人沒有實現(xiàn)商品化前,對其研究具有重要的意義[3-5]。目前,影響采摘機器人自主作業(yè)的關(guān)鍵問題是機器人的通信和定位識別技術(shù),因為在實際作業(yè)環(huán)境下會受到各種因素的干擾,機器人的定位和果實識別的準確度受到限制;而將多跳網(wǎng)絡(luò)和機器視覺技術(shù)相結(jié)合,可以有效地提高采摘機器人的通行能力和定位識別精度,對于新式采摘機器人的研究具有重要的指導(dǎo)意義。
1 基于多跳網(wǎng)絡(luò)節(jié)點定位的采摘機器人
在采摘機器人果實識別時,常用的方法是對果實的特征進行識別,在獲取果實圖像后需要對果實圖像進行處理,得到完整的邊界,這便需要采用機器視覺技術(shù)[6-7]。在機器視覺方面,國內(nèi)的很多專家和學(xué)者對其進行了大量的研究,也取得了一定的成果,如中國農(nóng)業(yè)大學(xué)的黃瓜采摘機器人(見圖1),可以利用光源補光的方法提高機器視覺的定位識別精度,但該款機器人在補光時消耗的能源較多,削弱了其性能[8-11]。

圖1 黃瓜采摘機器人Fig.1 Cucumber harvesting robot
在大面積作業(yè)時,為了降低采摘機器人能源消耗,提高其整體性能,可以在識別果實前首先對待采摘果實進行定位,將傳感器定位節(jié)點分布在待采摘區(qū)域可以實現(xiàn)待采摘區(qū)域的定位識別。在有局域網(wǎng)和基站分布的農(nóng)作物場地,可以采用單跳網(wǎng)絡(luò),如圖2所示。
無線單跳網(wǎng)絡(luò)將源節(jié)點的數(shù)據(jù)集中發(fā)布到一個基站,然后通過轉(zhuǎn)發(fā)的方式發(fā)布給轉(zhuǎn)接點;但一般農(nóng)田作業(yè)環(huán)境下,傳感器節(jié)點的數(shù)量較多,覆蓋范圍廣,而農(nóng)作物作業(yè)場地很多都沒有局域網(wǎng)覆蓋,而節(jié)點又需要長時間的供電和長時間監(jiān)測,這就需要引入多跳網(wǎng)絡(luò)[12]。多跳網(wǎng)絡(luò)模型如圖3所示。
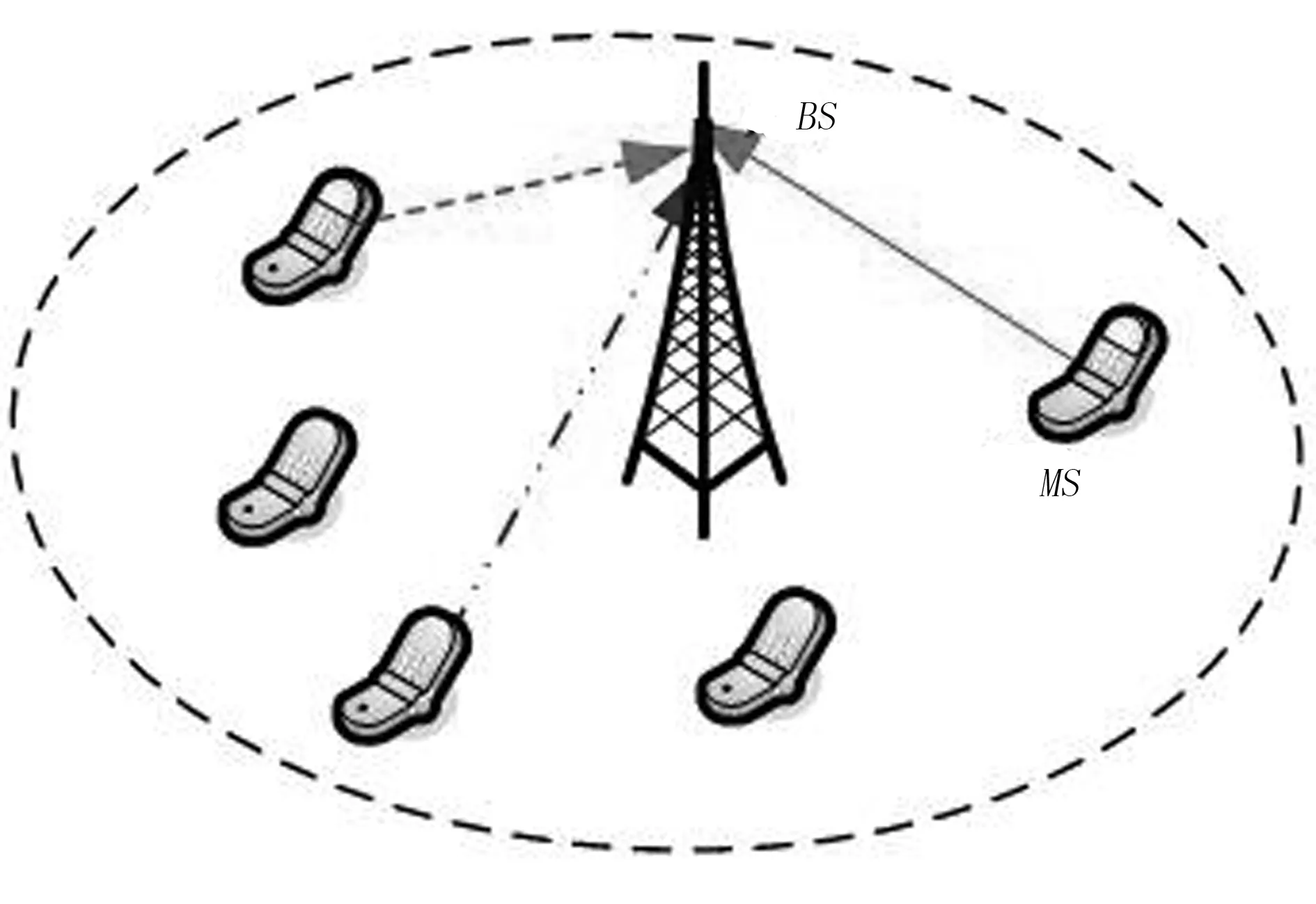
圖2 無線單跳網(wǎng)絡(luò)Fig.2 Wireless single hop network
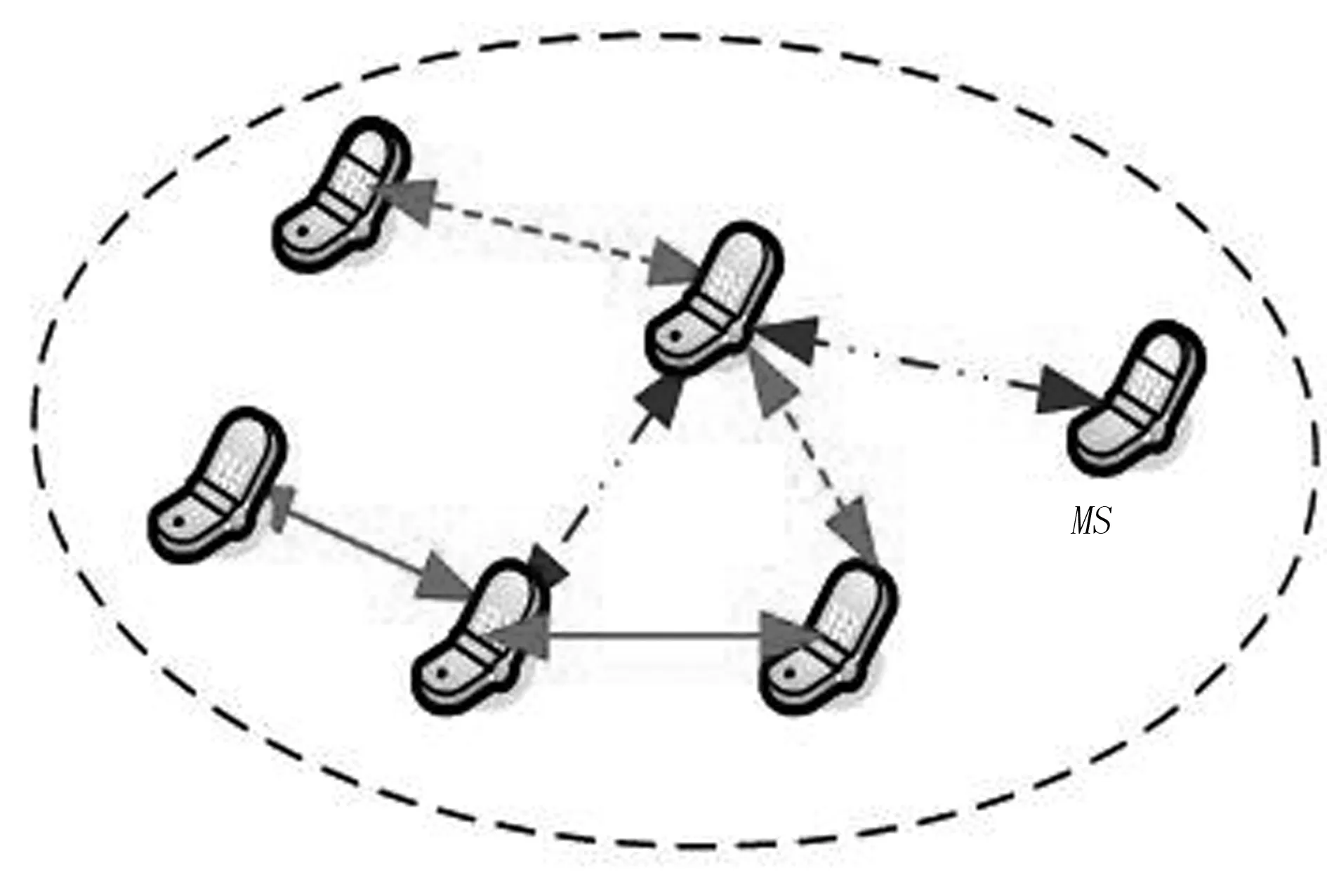
圖3 無線多跳網(wǎng)絡(luò)Fig.3 Wireless multi hop network
無線多跳網(wǎng)絡(luò)可以通過多個無線路由對接受數(shù)據(jù)進行轉(zhuǎn)發(fā),其部署簡單,節(jié)省能量,采用無線多跳傳輸、節(jié)點,可以使定位節(jié)點周期性睡眠,從而保證了能源的供應(yīng);將其使用在采摘機器人定位系統(tǒng)中,有效地提高了系統(tǒng)的整體性能[6]。
2 采摘機器人定位算法
采摘機器人進行定位時,為使機器人能夠快速做出響應(yīng),可以在使用機器視覺的同時,采用多跳自組織無線網(wǎng)節(jié)點定位模型算法,并可預(yù)先得到采摘目標或待采摘果實的信息,這些位置信息可以預(yù)先使用傳感器節(jié)點標記[13]。假設(shè)采摘作業(yè)區(qū)域是一個二維空間區(qū)域平面,該區(qū)域平面存在著傳感網(wǎng)絡(luò),該網(wǎng)絡(luò)可以表示為S={S1,S2,…,Sm+n}。其中,m表示已標記的位置節(jié)點;n表示未標記的位置節(jié)點。定位坐標可以用公式表示為
pos(Sa)=(xa,ya)Tp=1,…,m+n
(1)
其中,Si∈B的位置是已經(jīng)標記的,其余的節(jié)點Sj∈U位置是未知的;B={Si|i=1,2,…,m},U={Si|i=m+1,…,m+n},已標記位置采集到的最小跳數(shù)和距離分別被存儲到兩組數(shù)據(jù)集合中。節(jié)點Si到Sj的跳數(shù)為
h(Si,Sj)=H={0,1,2…}
(2)
節(jié)點Si到Sj的歐式距離為
(3)
將采摘機器人的定位節(jié)點分別分布在多跳自組織網(wǎng)絡(luò)中,形成動態(tài)分布的實時定位虛擬環(huán)境,可以鎖定待采摘果實的位置。本次設(shè)計采用樹形網(wǎng)絡(luò)結(jié)構(gòu),自組織網(wǎng)絡(luò)相當(dāng)于樹干,而定位節(jié)點相當(dāng)于樹枝。其中,多媒體信息主體部分相當(dāng)于樹葉,而數(shù)據(jù)冗余部分別動態(tài)的分配到樹葉結(jié)構(gòu)中,對于樹型結(jié)構(gòu)函數(shù)用F表示,一般采用如下的結(jié)構(gòu)樹公式為
H(e,f,K)=
(4)
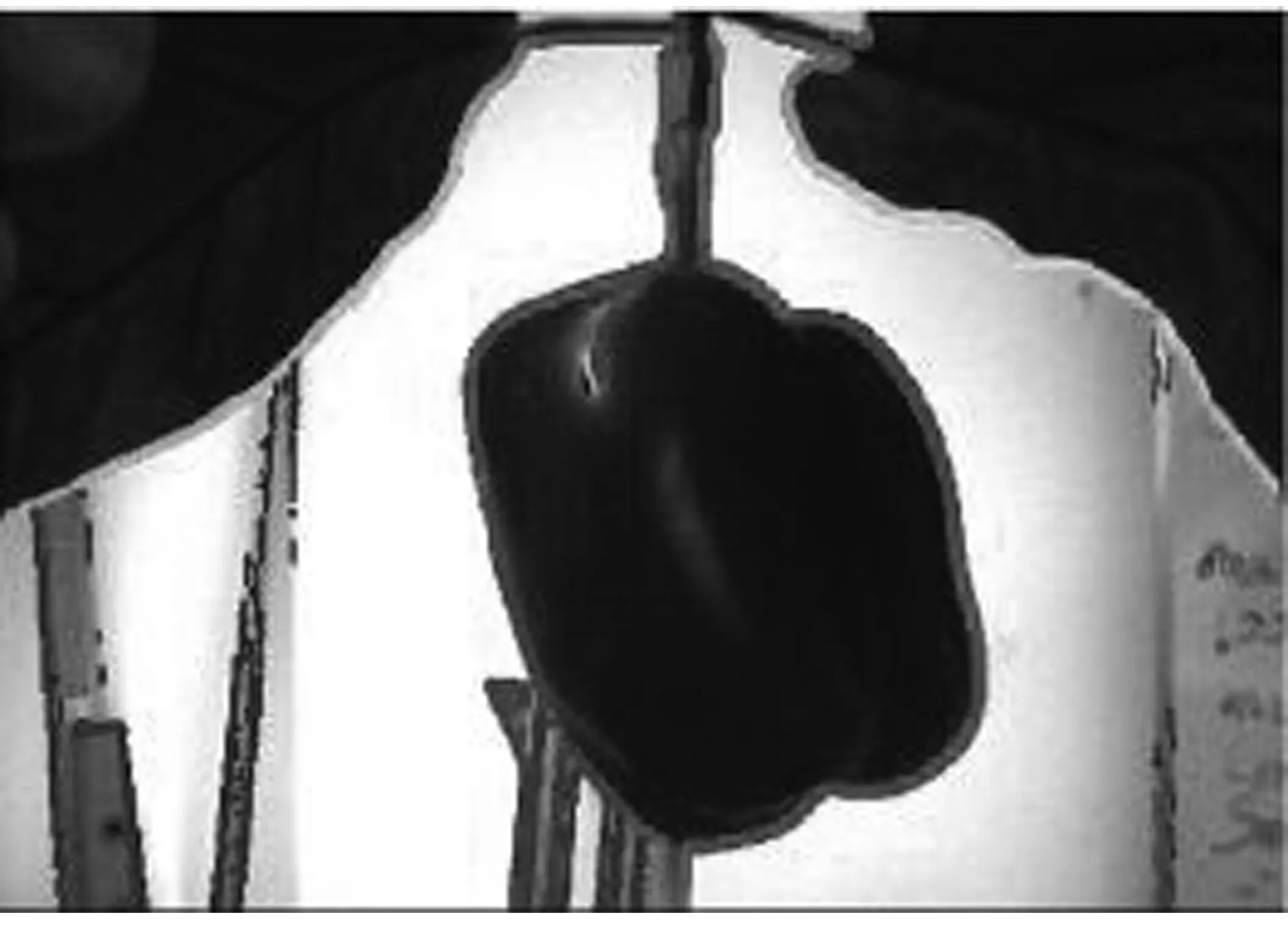
其中,e、f分別表示有無干擾時的信號強度,當(dāng)e=f時,通信能力最好;當(dāng)e (5) 采摘機器人在定位過程中多跳自組織網(wǎng)絡(luò)會消耗大量能量,其功率損耗最大允許距離為 (6) 其中,Ym表示完全損耗功率;Yn表示干擾時的接收敏感度;Yc表示無線速率;λa、λb分別表示無線耗系數(shù);Kp表示接口處的損耗;Lp表示多跳自組織網(wǎng)最大通信率。其中,自組織網(wǎng)絡(luò)通信限制距離為 (7) 將獲取的估計項獲得預(yù)測模型,在進行定位時,除了對已知定位節(jié)點可以直接定位,還可以對未知節(jié)點進行坐標計算,其流程如圖4所示。將已知的定位節(jié)點代入到測距模型中,可以獲取相應(yīng)的距離信息,結(jié)合已知節(jié)點的位置坐標和距離信息,可以對未知節(jié)點的位置區(qū)域進行估算,最終鎖定待采摘區(qū)域。 多跳自組織網(wǎng)絡(luò)可克服在復(fù)雜的采摘作業(yè)條件下,因為沒有網(wǎng)絡(luò)覆蓋而無法完成各種網(wǎng)絡(luò)功能的缺點,采用自組織網(wǎng)絡(luò),有效地實現(xiàn)了局部網(wǎng)絡(luò)通信功能,且具有較好協(xié)同作業(yè)能力。下面主要對采摘機器人的多跳網(wǎng)絡(luò)和機器視覺定位技術(shù)進行實驗測試。 如圖 5所示:為了驗證多跳網(wǎng)絡(luò)定位在采摘機器人上使用的可行性,以青椒采摘的作業(yè)環(huán)境為研究對象,通過對待采摘區(qū)域布置多跳網(wǎng)絡(luò)定位節(jié)點,來驗證多跳網(wǎng)絡(luò)定位的可行性和定位通信能力。 圖4 采摘機器人定位節(jié)點確定流程Fig.4 Determining process of positioning nodes of picking robot 圖5 多跳網(wǎng)絡(luò)定位節(jié)點布置Fig.5 Multi hop network positioning node arrangement 圖6是采摘機器人高清相機實際捕捉到的待采摘青椒的果實圖像,這種圖像不能夠被機器人直接識別,需要利用機器視覺技術(shù)對圖像進行處理來鎖定實際目標,處理后的結(jié)果如圖7所示。由圖7可以看出:采用視覺處理技術(shù)可以較為明顯地提取果實的具體輪廓,為采摘機器人的精確定位提供可靠的定位數(shù)據(jù)。 為了驗證其通信能力,分別對不同的定位方法引入了噪聲源,通過測試降噪后的各項參數(shù)指標,評估其通信能力,如圖8所示。其中,測試的項目主要包括誤差、信噪比及互相關(guān)系數(shù)。均方差表示降噪前后的方差的平均值,該數(shù)值越小,則降噪和通信能力越好;信噪比表示噪聲殘留的程度,其值越高,表示信號殘留的噪聲越小,其通信效果越好;相關(guān)系數(shù)表示原始信號和降噪信號的相似程度,其值越大,通信效果越好。 圖6 實際果實圖像采集Fig.6 Real fruit image acquisition 圖7 機器視覺圖像處理Fig.7 Machine vision image processing 圖8 采摘機器人實際采摘實驗Fig.8 The actual picking experiment of picking robot 圖9為噪聲源信號的波形。為了驗證采摘機器人多跳自組網(wǎng)的通信和抗干擾能力,在局部自組織網(wǎng)絡(luò)中使用了干擾信號,通過測試不同定位方法的信號波形,得到了如圖10所示的測試圖。 圖9 噪聲源信號Fig.9 Noise source signal 圖10 不同定位方法的降噪后通信結(jié)果Fig.10 Communication results after noise reduction in different positioning methods 采用不同的節(jié)點定位方法,降噪后得到的通信波形有所不同,對各組數(shù)據(jù)進行統(tǒng)計,得到了如表1所示的通信能力測試結(jié)果。 表1 通信能力測試結(jié)果Table 1 The test results of communication capability 由測試結(jié)果可以看出:采用多跳網(wǎng)絡(luò)節(jié)點定位降噪后得到的SNR和ρ值要明顯比普通傳感器節(jié)點定位的高,而RMS值要比EDM低,從而驗證了多跳網(wǎng)絡(luò)節(jié)點定位方法的優(yōu)越性。在噪聲干擾的環(huán)境下,采摘機器人依然具有較好的通信能力,可以對待采摘區(qū)域?qū)嶋H較為精確的定位。 在采摘機器人定位系統(tǒng)的設(shè)計中引入了多跳無線網(wǎng)絡(luò),解決了農(nóng)田作業(yè)條件下傳感器定位節(jié)點數(shù)量多、范圍廣、能耗大、缺少局域網(wǎng)覆蓋的問題,有效地提高了采摘機器人的整體性能。設(shè)計了采摘機器人的果實目標定位機器視覺系統(tǒng),并對其進行了測試,結(jié)果表明:采摘機器人在待采摘區(qū)域準確定位后,可以有效識別青椒的輪廓邊界,從而完成定位過程。對采摘機器人無線多跳網(wǎng)絡(luò)進行了抗干擾和通信能力測試,結(jié)果表明:在噪聲干擾條件下,采用多跳網(wǎng)絡(luò)設(shè)計的采摘機器人定位系統(tǒng)可以保持良好的通信能力,可以完成準確的定位識別功能。 [1] 魏祥麟,胡永揚,王曉波,等.基于度分布的多跳無線網(wǎng)絡(luò)干擾節(jié)點部署方法[J].南京理工大學(xué)學(xué)報, 2015,39(5):590-595. [2] 王艷,唐秀芳.基于昆蟲協(xié)作機理的分布式無線傳感器網(wǎng)絡(luò)節(jié)能方法[J].南京理工大學(xué)學(xué)報,2013, 37(6):826-832. [3] 張迎勝,單志龍.線性回歸在無線傳感器網(wǎng)絡(luò)定位中的應(yīng)用研究[J].小型微型計算機系統(tǒng),2014, 35(7):1500-1504. [4] 趙景堂,杜國明,李秀海.基于總體最小二乘法的二維坐標轉(zhuǎn)換方法[J].黑龍江工程學(xué)院學(xué)報,2015, 29(1):21-22. [5] 陳榮,管吉興,張喜明.數(shù)字Costas環(huán)的設(shè)計與實現(xiàn)[J].無線電工程,2010,40(3):24-26. [6] 孫言強,王曉東,周興銘.無線網(wǎng)絡(luò)中的干擾攻擊[J].軟件學(xué)報,2012,23(5):1207-1221. [7] 孫言強,王曉東,周興銘.無線傳感器網(wǎng)絡(luò)中基于幾何覆蓋的Jamming攻擊定位算法[J].通信學(xué)報,2010, 31(11):10-16. [8] 周世兵,徐振源,唐旭清.K-means算法最佳聚類數(shù)確定方法[J].計算機應(yīng)用,2010,30(8):1995-1998. [9] 盧軍,王賢鋒,候德家.水果采摘機器人視覺系統(tǒng)研究進展[J].湖北農(nóng)業(yè)科學(xué),2012,51(21):4705-4708. [10] 熊俊濤,葉敏,鄒湘軍,等.多類型水果采摘機器人系統(tǒng)設(shè)計與性能分析[J].農(nóng)業(yè)機械學(xué)報,2013,44(S1): 231-235. [11] 畢昆,趙馨,侯瑞鋒,等.機器人技術(shù)在農(nóng)業(yè)中的應(yīng)用方向和發(fā)展趨勢[J].中國農(nóng)學(xué)通報,2011,27(4):469- 473. [12] 黃巖巖,李慶,張斌珍.魚眼鏡頭的標定和畸變校正研究[J],計算機工程與設(shè)計,2014,35(9):3132-3135. [13] 周世兵,徐振源,唐旭清.K-means算法最佳聚類數(shù)確定方法[J].計算機應(yīng)用,2010,30(8):1995-1998.3 多跳無線網(wǎng)絡(luò)和機器視覺定位技術(shù)測試






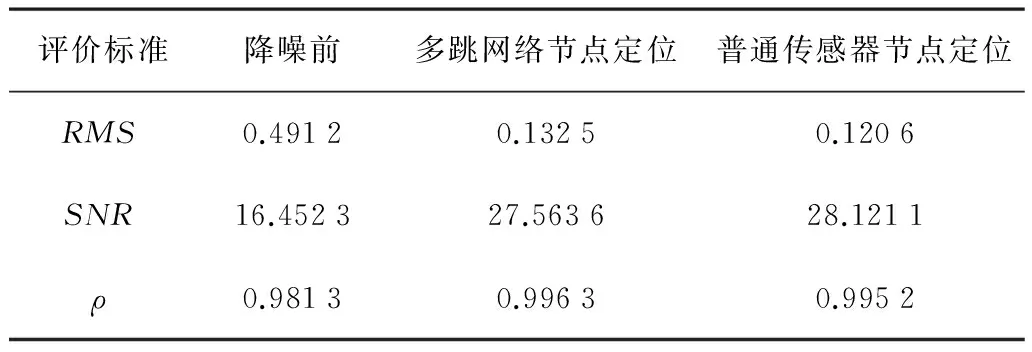
4 結(jié)論
