仿蝗蟲跳躍機器人起跳階段剛柔耦合分析與研究
2018-03-21 05:48:40孫立華朱人杰徐成宇曹曉捷
機械設計與制造 2018年3期
關鍵詞:模型
孫立華,朱人杰,徐成宇,曹曉捷
(1.長春工業大學 工程訓練中心,吉林 長春 130012;2.長春理工大學 機電工程學院,吉林 長春 130022)
1 引言
仿生跳躍機器人涉及仿生學、機械學和控制學等多個學科,該類產品與技術多被用于外星探索等特殊環境領域,月球、火星等表面重力加速度遠小于地球,跳躍機器人可以越過數倍、甚至數十倍于自身尺寸的障礙物。近年來,相關研究者們正試圖研制能模仿動物運動機理的機構模型,例如:美國宇航局(NASA)下屬的噴氣動力學實驗室(JPL)與加利福尼亞技術學院聯合研制的仿青蛙彈跳機,用于擴大漫游車在星際探索中崎嶇地形地貌下的活動范圍[1];S.H.Hyon和T.Mita通過模仿肌腱在跑和跳過程中起到的作用,設計的‘KenKen’機器人[2]有兩個液壓馬達來模擬肌肉,和一根來模擬肌腱的彈簧組成,證明了此結構對腿型機器人小跑步態的有效性。文獻[3]開展了對于仿袋鼠跳躍機器人的動力學、運動學特性的研究。為了能夠很好地體現動物的運動原理機構模型,文獻[4-5]分別從動物結構角度方面揭示后腿關節在起跳階段的運動變化。即蝗蟲后腿的膝關節是跳躍運動核心,輕質堅硬的脛節和柔性化的跗節等是跳躍的重要保證,一次成功的起跳需要后腿足夠大的蹬地力和與之相對應的速度[6]。蝗蟲具有很好的彈跳能力,(1.5~2.0)g重的蝗蟲(SchistoGcerca Gregaria)用(9~11)mj的能量在 30ms內能使其自身加速到3.2m/s[7],其最佳跳躍過程的加速度為重力加速度的19倍,蝗蟲在運動中所表現出的驅動能量效率是巨大的。
目前,仿生跳躍機器人的研制大多將關注點放在了跳躍運動機理和機構實現兩個方面,其構建的模型與地面多為點接觸,缺乏對跳躍系統中單個部件能量變化的研究,忽略其變化對整個跳躍系統的影響,故提出具有腳部以及柔性的仿蝗蟲機器人成為必要。
2 跳躍機器人運動原理設計
所設計的仿蝗蟲跳躍機器人總體機構運動簡圖,如圖1所示。后腿彈跳機構由凸輪機構、六連桿機構和彈簧裝置構成,電機驅動蝸桿蝸輪經過齒輪機構,凸輪機構帶動連桿機構和機體緩慢下降,彈簧在此過程中蓄能,直至凸輪運動至最大行程處,六連桿機構在彈簧的帶動下,滾輪提升至凸輪近休止處,跗節瞬間給地面很大的作用力,從而獲得很大加速度帶動機體騰空而起。在此過程中凸輪充當鎖定/觸發裝置,彈簧彈性勢能轉化為勢能和動能。前腿爬行減震機構為多自由度連桿機構,配有減震彈簧,減輕蝗蟲機器人落地重量。
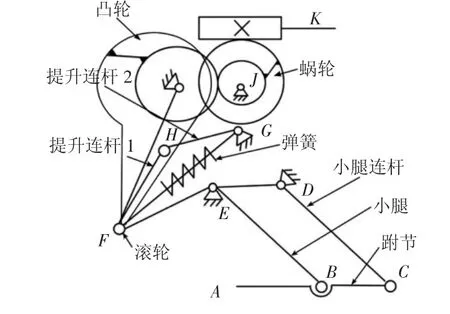
圖1 仿蝗蟲機器人總體機構運動簡圖Fig.1 Kinematic Sketch of HoppingRobot
3 跳躍機構柔性體模型建立
考慮到蝗蟲跳躍雙腳同時著地,因此分析時簡化為單腿機構;同時忽略其前腳、頭部和翅膀部分。在跳躍過程中只考慮其軀干的影響。有5個剛性桿AC、CD、BE、DE、EF分別模擬蝗蟲的腳、脛節、連桿、機體和后腿脛節,點C、D模擬踝和膝關節,如圖2(a)所示。蝗蟲在跳躍過程中,其腿部肌肉和腱在調節跳躍運動和身體姿態、儲存和釋放能量發揮了重要的作用。為了模擬腿部肌肉和腱的儲能作用,將膝關節D點及踝關節C點分別加裝扭轉彈簧成為柔性關節,可建立仿蝗蟲跳躍機器人部分柔性單腿跳躍機構模型[8-9],如圖 2(b)所示。
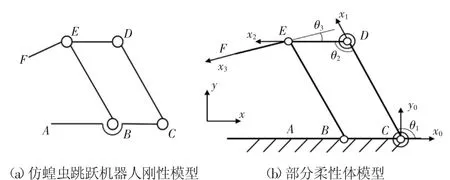
圖2 仿蝗蟲跳躍機器人后腿機構模型Fig.2 Model of Hind Mechanism of Locust-Like Hopping Robot
4 運動學方程建立
設蝗蟲起跳階段,系統不發生滑動,取A點為坐標原點,建立基坐標系 Axyz,如圖 2(b)所示。其中,z軸垂直紙面向外,l1、l2、l3分別為 CD、DE、EF 的長度,θ1、θ2、θ3分別為各連桿間的夾角,可得到軀體位姿質心坐標P3x和P3y:

式中:P3x和P3y—時間t求一階導數,可以得到軀體質心的速度分量 V3x和 V3y。
5 動力學方程建立
依據運動學分析基礎,對各關節轉角進行重新定義,如圖3所示。l1、l2、l3分別為 CD、DE、EF 的長度,φ1、φ2、φ3分別為各連桿同 x軸正向的夾角,m1、m2、m3為各連桿質量,J1、J2、J3為各連桿繞自身質心的轉動慣量;膝關節與踝關節處扭簧剛度為k,采用拉格朗日方法建立仿蝗蟲跳躍機器人動力學方程。系統的總動能K為:

式中:K1,K2,K3—各連桿的動能,可以分別用上述參變量表示。
系統總勢能為各桿件的重力勢能與膝關節踝關節處扭簧的彈性勢能之和:


式中:Ki—連桿動能;v0i—質心速度;ωi—角速度;Ji—轉動慣量。則仿蝗蟲跳躍機構系統動力學方程的拉格朗日方程為:

將動能方程(2)與勢能方程(3)微分,則可得到各關節的輸入力矩:

可獲得踝關節Mc、膝關節MD。

圖3 仿蝗蟲跳躍機器人動力學分析模型Fig.3 Dynamic Model of Locust-Like Hopping Robot
6 剛性體與柔性體模型對比仿真分析
仿蝗蟲機器人柔性腿系統動力學方程是一個典型的非線性微分方程,采用RECURDYN中柔性體模塊,構件采用模態縮減技術[10-11](即RFLEX),保障精度與速度的平衡。根據上述的分析,得出仿蝗蟲機器人電子樣機的整機尺寸:體長1100mm,體高260mm,體寬200mm,前、中足腿長200mm,后腿脛節300mm。重量約為5kg。滾輪直徑10mm,最大行程173mm,后腿擺幅110°。其中,彈簧剛度系數k=25N/mm,彈簧原長125mm,最大伸長量100mm。


圖4 剛—柔模型起跳分析Fig.4 The Analysis of the Starting and Jumping of the Soft Model
通過剛柔耦合分析,可得到起跳階段主要關節驅動力變化,如圖4所示。對于剛性體模型,當凸輪蓄能結束,彈簧恢復瞬間(即蝗蟲起跳脫離地面),由于踝關節需要克服其自身包括軀干、脛節、跗節等在內的所有重力和慣性力的緣故,故踝關節所需要的跳躍力最大,瞬間達到2.2kN,膝關節為0.8kN,對機構瞬時沖擊較大,易損傷機構。
而對于仿蝗蟲機器人柔性體模型,如圖4所示。在相同的條件下,依靠膝關節和踝關節扭簧的作用,可使驅動力逐漸變大,遠超剛性體模型驅動力,避免瞬時沖擊過大,提高結構穩定性,符合跳躍動量相同情況下,起跳時間越短起跳力越大的規律,提高了蝗蟲的跳躍能力。從圖4(c)可看出,經過柔性化后脛節的角速度呈現振蕩,原因是受到凸輪的接觸應力與彈簧拉伸阻力的影響,柔化后的角速度幅值明顯較剛性體為大。

圖5 仿蝗蟲機器人跳躍曲線Fig.5 Topping Curve of Locust-Like Robot
從圖5中可以看出,由于柔性體模型能夠有效調節質心位置,減少身體擺動帶來的能量損失,所以無論是跳躍高度、騰空時間都較剛性體模型有很顯著的提升,它的跳躍曲線最高點高度接近1750mm。
7 有限元分析
7.1 結構靜力學分析
將柔性腳剛柔耦合模型導入ANSYS中[12-14],簡化模型,去除身體部分及中間動力傳動部分,進行靜態結構分析。其中,模型所用材料為環氧樹脂復合板,其材料性能參數為:ρ=1.95g/cm3,E=40GPa,μ=0.3,拉伸強度 σt=1200MPa,壓縮強度 σc=700MPa。經過模擬分析,可得到后腿跳躍結構系統等效應力、應變和總變形云圖。據此可知,最大等效應力值為2.3MPa,發生在踝關節處。
7.2 振動模態分析
由于各階次振型下的固有頻率有可能引起共振破壞,因此模態分析擴展為六階。有限元計算得到脛節與跗節的固有頻率與振型之間的關系,如表1所示。前四階振型下的變化情況,如圖6所示。
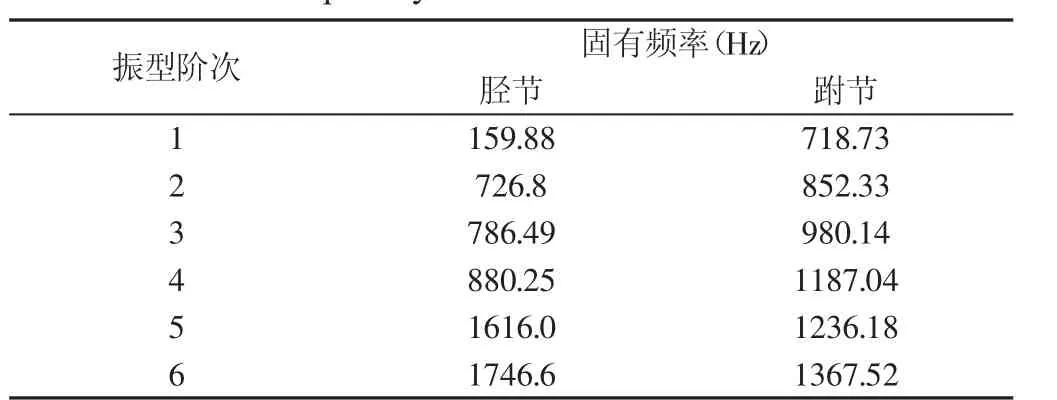
表1 脛節與跗節六階模態固有頻率Tab.1 Sixth-Order Modal Natural Frequency of Tarsusand Tibia
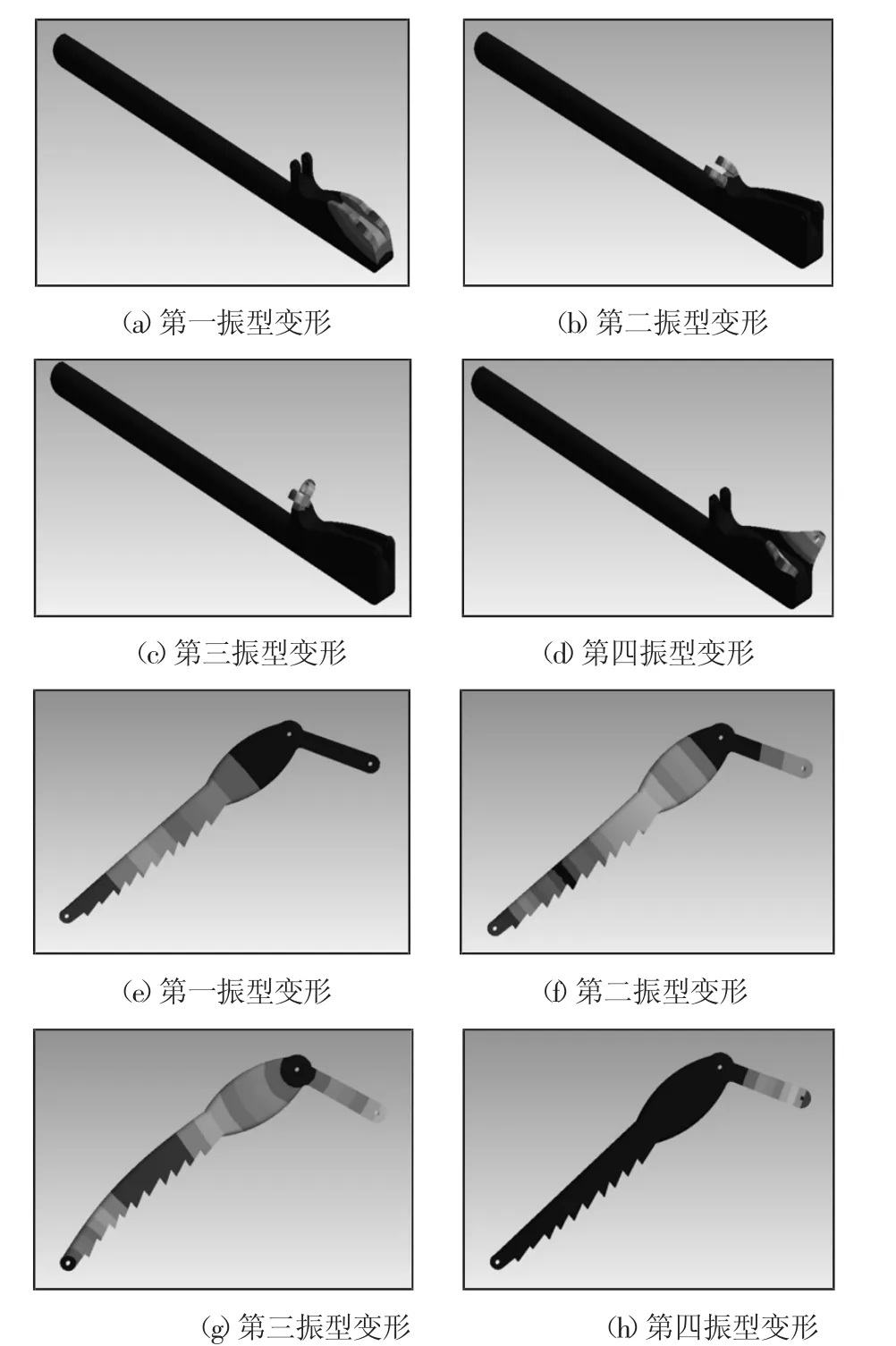
圖6 跗節和脛節前四階振型變形Fig.6 Previous Deformation Vibration Mode ofTarsus and Tibia
由跗節不同振型下變形情況可知:前四階振型下的振動位移都集中在鉸接處,且都為軸向變形位移,且隨階次升高而增大,對于跗節結構造成影響;而脛節的變形情況則更加復雜,既存在軸向的位移,還產生扭轉變形,導致產生較大的附加慣性力和慣性力矩,對跳躍結構產生不良影響。
8 結論
通過加裝扭簧將柔性機構運用至仿蝗蟲跳躍機構中,建立部分柔性單腿跳躍機構模型,運用RECURDYN軟件進行多體動力學仿真,計算各關節和關鍵結構的驅動力、速度、角速度的變化曲線,并與剛性體模型進行數據對比分析:
(1)柔性機構可有效提高結構穩定性,同時跳躍曲線最高點高度接近1750mm。
(2)通過靜力學與振動模態分析,可獲得踝關節處的最大等效應力值為2.3MPa及復雜的脛節變形行為,為避免系統共振提供重要參考價值。
[1]Malcom Burrows.The kinematics and neural control of high-speed kicking movements in the locust[J].Experimental Biology,2001(204):3471-3481.
[2]Hale E,Schara N,Burdick J.A minimally actuated hoppingrover for exploration of celestial bodies[C].Proceedings of theIEEE International Conference on Robotics and Automation.SanFrancisco:IEEE Press,2000:420-427.
[3]S.H.Hyon,T.Mita.Development of biologically inspired hopping robot[C].Proceedings of the 2002 IEEE international conference on robotics automation Washington,DC,2002(5).
[4]Heitler W J.How locust jump[EB/OL].Standrews:The University of St Andrews,2007[2012-07-21].
[5]Burrows M,Sutton P.Locusts use a composite of resilin and hardcuticle as an energy store for jumping and kicking[J].The Journalof Experimental Biology,2012,215(19):3501-3512.
[6]Chen Dian-sheng,Yin Jun-mao,Zhao Kai.Bionic mechanismand kinematics analysis of hopping robot inspired by locust jumping[J].Journal of Bionic Engineering,2011,8(4):429-439.
[7]葛文杰,沈允文,楊方.仿袋鼠機器人跳躍運動步態的運動學[J].機械工程學報,2006,42(5):22-26.(Ge Wen-jie,Shen Yun-wen,Yang Fang.Kinematics gait of kangaroo hopping robot[J].Journal of Mechanical Engineering,2006,42(5):22-26.)
[8]黃則兵,葛文杰.柔性機構及其在仿生跳躍機構中應用的研究[J].機械設計與研究,2004,(增刊):279-282.(Huang Ze-bin,Ge Wen-jie.Research on flexible institutions and their application in bionic hopping mechanism[J].Machine Design and Research,2004,(Suppl):279-282.)
[9]楊繪宇,王石剛,梁慶華.仿蝗蟲跳躍機器人起跳過程運動學建模及分析[J].機械設計,2010,27(4):54-57.(Yang Hui-yu,Wang Shi-gang,Liang Qin-hua.Imitation locust hopping robot kinematics modeling and analysis process Jump[J].Mechanical Design,2010,27(4):54-57.)
[10]李向陽.仿袋鼠機器人柔性跳躍機構的動力學分析[D].西安:西北工業大學,2006.(Li Xiang-yang.Kinetic analysis of flexible robot kangaroo hopping mechanism[D].Xi’an:Northwestern Polytechnic University,2006.)
[11]李向陽,葛文杰,楊方.考慮腳部柔性的仿袋鼠跳躍機器人運動特性研究[J].機器人,2006,28(4):374-376.(Li Xiang-yang,Ge Wen-jie,Yang Fang.Locomotion analysis of hopping kangaroorobotsconsideringfootcompliance[J].Robot,2006,28(4):374-376.)
[12]楊方飛,閆光,郝云霄.基于剛柔耦合仿真模型的高地隙噴霧機轉向機構特性[J].吉林大學學報:工學版,2015,45(3):857-863.(Yang Fang-fei,Yan Guang,Hao Yun-xiao.Study on the characteristics of steering system for high clearance sprayerbased on rigid-flexible coupling simulation model[J].Journal of Jilin University:Engineering and Technology Edition,2015,45(3):857-863.)
[13]Jose G,Joaquin F,Eduardo B.Numerical Simulation ofthe Dynamic Effects Due to Impeller-volute Interactionin A Centrifugal pump[J].Journal of Fluids Engineering,2002,124(2):348-355.
[14]王悅,張仲鵬,申士林.基于ANSYS卷筒單層卷繞與多層卷繞的優化設計[J].機械設計與制造,2012(8).(Wang Yue,Zhang Zhong-peng,Shen Shi-lin.Optimization design of single winding and multi-layer winding roll based on ANSYS[J].Machinery Design & Manufacture,2012(8).)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
