寬幅相機(jī)一體化焦面調(diào)整機(jī)構(gòu)設(shè)計(jì)與精度分析
2018-03-21 05:48:36謝玉婷賈學(xué)志
機(jī)械設(shè)計(jì)與制造 2018年3期
關(guān)鍵詞:設(shè)計(jì)
謝玉婷 ,安 源 ,賈學(xué)志 ,李 季
(1.中國(guó)科學(xué)院 長(zhǎng)春光學(xué)精密機(jī)械與物理研究所,吉林 長(zhǎng)春 130033;2.中國(guó)科學(xué)院 研究生院,北京 100039;3.長(zhǎng)光衛(wèi)星技術(shù)有限公司,吉林 長(zhǎng)春 130051)
1 引言
隨著衛(wèi)星遙感技術(shù)的發(fā)展,衛(wèi)星遙感圖像在國(guó)防安全、國(guó)土資源、城市規(guī)劃等多個(gè)領(lǐng)域起到了重要作用,具有廣泛的應(yīng)用前景。由于光學(xué)衛(wèi)星自身的不確定性,要想獲得更清晰的圖像,必須在光學(xué)系統(tǒng)內(nèi)加入焦面調(diào)整機(jī)構(gòu)。一方面,受衛(wèi)星發(fā)射過(guò)程中的振動(dòng)、沖擊以及在軌復(fù)雜的空間環(huán)境的影響,光學(xué)系統(tǒng)的焦面會(huì)偏離理想成像位置產(chǎn)生離焦;另一方面,空間相機(jī)在軌對(duì)地成像時(shí),地球自轉(zhuǎn)造成物點(diǎn)在像面上的漂移以及飛行器姿態(tài)變化會(huì)產(chǎn)生偏流角[1-2]。離焦和偏流角會(huì)造成圖像不清晰,降低成像質(zhì)量,為獲得高質(zhì)量的圖像需對(duì)離焦和偏流角進(jìn)行補(bǔ)償。對(duì)離焦的補(bǔ)償通常采用外加調(diào)焦機(jī)構(gòu)的方法;對(duì)于偏流角的補(bǔ)償,有安裝偏流調(diào)整機(jī)構(gòu)和調(diào)整衛(wèi)星姿態(tài)兩種方式,但是通過(guò)對(duì)衛(wèi)星姿態(tài)的精密控制實(shí)時(shí)調(diào)偏流的技術(shù)在國(guó)內(nèi)尚未正式應(yīng)用。目前國(guó)內(nèi)通常采用外加獨(dú)立的調(diào)焦和調(diào)偏流機(jī)構(gòu)的方法對(duì)離焦和偏流角進(jìn)行補(bǔ)償,這樣會(huì)造成占用空間大、質(zhì)量重、裝調(diào)困難等問(wèn)題。長(zhǎng)春光機(jī)所的柴方茂等人針對(duì)這一問(wèn)題設(shè)計(jì)了焦面二維精密調(diào)整機(jī)構(gòu),將調(diào)焦和調(diào)偏流機(jī)構(gòu)設(shè)計(jì)成一個(gè)整體,但該機(jī)構(gòu)存在支撐強(qiáng)度差,僅適用于小尺寸焦面等問(wèn)題[3]。因此在分析寬幅相機(jī)的光學(xué)系統(tǒng)的特點(diǎn)的基礎(chǔ)上,設(shè)計(jì)了一套一體化焦面二維調(diào)整機(jī)構(gòu),它具有結(jié)構(gòu)緊湊,定位精度高,易于裝調(diào),可實(shí)現(xiàn)大尺寸焦面拼接等特點(diǎn)。通常設(shè)計(jì)的對(duì)象是不考慮受力與變形,形狀、尺寸絕對(duì)精確的理想機(jī)構(gòu)。但理想機(jī)構(gòu)實(shí)際上并不存在,受機(jī)械制造工藝和裝調(diào)條件的限制,機(jī)構(gòu)中存在各種誤差,如構(gòu)件的尺寸誤差、形狀誤差以及安裝偏心誤差等,均會(huì)造成機(jī)構(gòu)精度下降、圖像補(bǔ)償效果不理想,因此對(duì)機(jī)構(gòu)進(jìn)行精度分析十分必要,這也是空間相機(jī)獲取清晰圖像的關(guān)鍵因素之一[4]。
2 執(zhí)行機(jī)構(gòu)方案的選取
2.1 設(shè)計(jì)原則
該寬幅相機(jī)采用的是離軸三反光學(xué)系統(tǒng),它具有大視場(chǎng)、無(wú)中心遮攔的優(yōu)點(diǎn),但其裝調(diào)難度大、成本高[5]。通常在該系統(tǒng)中,主鏡和三鏡位于后背板上,次鏡、焦面及焦面調(diào)整機(jī)構(gòu)均安裝在前板上,但是空間寬幅相機(jī)焦面尺寸過(guò)大、質(zhì)量較重,焦面調(diào)整機(jī)構(gòu)及折返鏡總重約45kg,且系統(tǒng)懸臂過(guò)長(zhǎng),這樣勢(shì)必會(huì)造成前板受力過(guò)大,變形嚴(yán)重,影響系統(tǒng)精度,故在前板上安裝一塊折返鏡,將焦面、焦面調(diào)整機(jī)構(gòu)安裝在強(qiáng)度更好的后背板,如圖1所示。
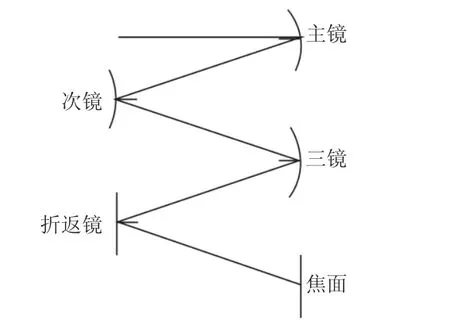
圖1 離軸三反光學(xué)系統(tǒng)示意圖Fig.1 Schematic of Off-Axis Three Mirror Optical System
2.2 設(shè)計(jì)指標(biāo)
相機(jī)總體結(jié)構(gòu)及精度指標(biāo)對(duì)焦面調(diào)整機(jī)構(gòu)的重量、外形尺寸及各項(xiàng)精度進(jìn)行了嚴(yán)格約束,要求其重量小于12kg,外形尺寸不超過(guò)(350×350×300)mm ,焦面全程晃動(dòng)量?jī)?yōu)于 10",調(diào)焦定位精度優(yōu)于0.005mm,空回優(yōu)于0.01mm;調(diào)偏流定位精度優(yōu)于5",空回優(yōu)于30"。
2.3 傳動(dòng)方案的選取
相機(jī)的調(diào)焦和調(diào)偏流方案因相機(jī)光學(xué)系統(tǒng)的不同而不同,常用傳動(dòng)方案[6-7]主要有凸輪傳動(dòng)、絲杠螺母?jìng)鲃?dòng)和蝸輪蝸桿傳動(dòng)方案,它們各有利弊,比如凸輪傳動(dòng)方案精度高、結(jié)構(gòu)簡(jiǎn)單,其運(yùn)動(dòng)件經(jīng)過(guò)冷焊處理后無(wú)冷焊、卡滯現(xiàn)象,但是加工要求高,成本高;絲杠螺母?jìng)鲃?dòng)方案結(jié)構(gòu)簡(jiǎn)單、體積小、成本低,但自鎖能力差,抗沖擊能力弱;蝸輪蝸桿傳動(dòng)方案?jìng)鲃?dòng)比大,自鎖能力好,但是傳動(dòng)效率低。結(jié)合本相機(jī)的特點(diǎn),調(diào)焦機(jī)構(gòu)和調(diào)偏流機(jī)構(gòu)分別選用蝸輪蝸桿—偏心軸、蝸輪蝸桿—絲杠螺母?jìng)鲃?dòng)方案。調(diào)焦和調(diào)偏流機(jī)構(gòu)通常采用各自獨(dú)立的結(jié)構(gòu),存在占用空間大,質(zhì)量重,裝調(diào)困難等問(wèn)題。基于空間大尺寸焦面的寬幅相機(jī)對(duì)調(diào)焦和調(diào)偏流機(jī)構(gòu)的要求及現(xiàn)狀,提出了一種一體化焦面二維調(diào)整機(jī)構(gòu),將調(diào)焦和調(diào)偏流機(jī)構(gòu)設(shè)計(jì)成一個(gè)整體機(jī)構(gòu),能同時(shí)實(shí)現(xiàn)調(diào)焦和調(diào)偏流功能且二維運(yùn)動(dòng)互不干涉,既節(jié)省空間,減小了質(zhì)量,又放寬了裝調(diào)指標(biāo),便于裝調(diào),且結(jié)構(gòu)中采用同類別的電機(jī)和編碼器,減小了設(shè)計(jì)難度、加工周期及成本。
3 一體化焦面二維調(diào)整機(jī)構(gòu)設(shè)計(jì)
一體化焦面二維調(diào)整機(jī)構(gòu)主要由調(diào)焦單元和調(diào)偏流單元組成,如圖2所示。其中調(diào)焦驅(qū)動(dòng)單元采用蝸輪蝸桿—偏心軸機(jī)構(gòu),步進(jìn)電機(jī)通過(guò)蝸輪副帶動(dòng)偏心軸,使連接在偏心軸上的調(diào)焦組件沿直線導(dǎo)軌軸向往復(fù)運(yùn)動(dòng),達(dá)到調(diào)焦目的;調(diào)偏流驅(qū)動(dòng)單元采用蝸輪蝸桿—絲杠螺母機(jī)構(gòu),步進(jìn)電機(jī)通過(guò)蝸輪副帶動(dòng)絲杠軸,使連接在絲杠上的螺母沿絲杠軸向平移,進(jìn)而帶動(dòng)螺母上的撥叉運(yùn)動(dòng),調(diào)偏流組件被撥叉帶動(dòng)沿光軸方向轉(zhuǎn)動(dòng),達(dá)到調(diào)偏流目的。
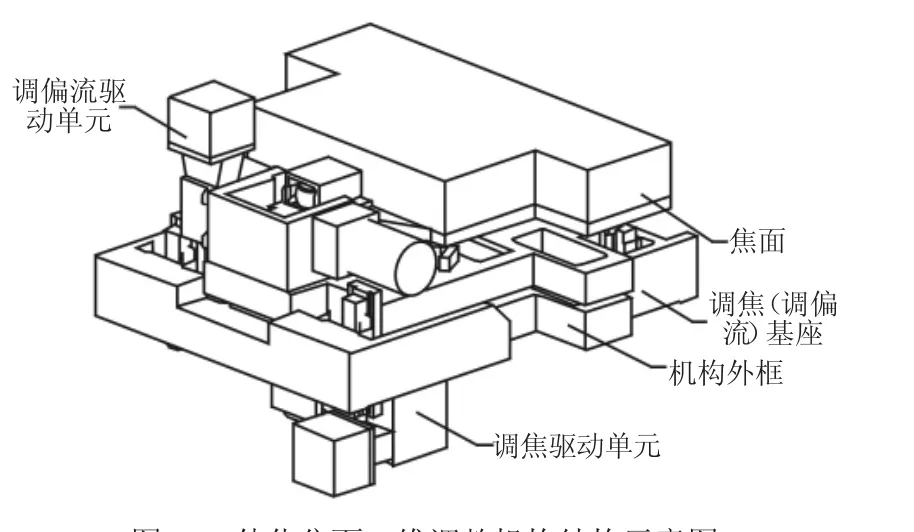
圖2 一體化焦面二維調(diào)整機(jī)構(gòu)結(jié)構(gòu)示意圖Fig.2 Structure Diagram of Integrated Two-Dimensional Adjusting Mechanism for the Focal Plane
4 一體化焦面二維調(diào)整機(jī)構(gòu)精度分析
4.1 誤差分類
一體化焦面二維調(diào)整機(jī)構(gòu)的誤差主要分為加工誤差、裝調(diào)誤差及空回誤差[8]。
4.2 誤差分配
任何測(cè)量過(guò)程皆包含多項(xiàng)誤差,而測(cè)量結(jié)果的總誤差則由各個(gè)單項(xiàng)誤差的綜合影響所確定。通過(guò)測(cè)量掌握了各個(gè)單項(xiàng)誤差以求測(cè)量結(jié)果的總誤差,是誤差的合成;相反,如果給定測(cè)量結(jié)果允許的總誤差,要求確定各個(gè)單項(xiàng)誤差,就是誤差分配。
4.2 .1調(diào)焦單元誤差傳遞函數(shù)推導(dǎo)
調(diào)焦單元主要由調(diào)焦電機(jī)組件,直線導(dǎo)軌,編碼器組件,螺旋傳動(dòng)機(jī)構(gòu)等組成,其原理,如圖3所示。電機(jī)通過(guò)蝸輪蝸桿帶動(dòng)偏心軸轉(zhuǎn)動(dòng),進(jìn)而推動(dòng)調(diào)焦組件沿直線導(dǎo)軌滑動(dòng),實(shí)現(xiàn)調(diào)焦。
焦面組件位移公式:H=R×sina (1)
式中:H—焦面組件位置;R—偏心軸的偏心量。當(dāng)R=4mm,偏心軸轉(zhuǎn)角a從-90°轉(zhuǎn)到90°時(shí),機(jī)構(gòu)實(shí)現(xiàn)(±4)mm的調(diào)焦。分析可知,影響調(diào)焦精度的主要因素有,螺旋傳動(dòng)機(jī)構(gòu)的空回誤差x1、偏心軸加工誤差x2及直線導(dǎo)軌的安裝誤差x3。

式中:Δa—偏心軸轉(zhuǎn)角a的誤差;l1—導(dǎo)軌安裝長(zhǎng)度;b—導(dǎo)軌安裝偏角。
綜上所述,令 H=f(a,R,b),則誤差傳遞函數(shù)為:

式中:σi—測(cè)量值i的標(biāo)準(zhǔn)差—測(cè)量值i的誤差傳遞系數(shù)。
4.2 .2調(diào)偏流單元誤差傳遞函數(shù)推導(dǎo)
調(diào)偏流單元主要由調(diào)偏流電機(jī)組件,編碼器組件,絲杠螺母?jìng)鲃?dòng)機(jī)構(gòu),撥叉組件,弧形導(dǎo)軌,焦面組件等組成。絲杠螺母機(jī)構(gòu)把步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)轉(zhuǎn)化為螺母沿絲杠方向的直線運(yùn)動(dòng),再經(jīng)過(guò)撥叉組件帶動(dòng)焦面組件沿弧形導(dǎo)軌轉(zhuǎn)動(dòng),實(shí)現(xiàn)調(diào)偏流,其原理,如圖4所示。
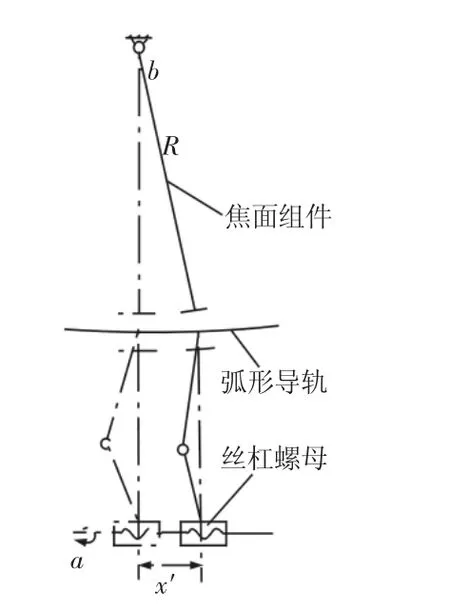
圖4 調(diào)偏流單元運(yùn)動(dòng)原理圖Fig.4 Motion Diagram of Drift Adjusting Mechanism

式中:a—絲杠轉(zhuǎn)角;p—絲杠螺距。
分析知,調(diào)偏流單元的誤差源主要有:傳動(dòng)機(jī)構(gòu)的空回誤差x1,絲杠螺母軸線總偏差x2,安裝誤差的傳遞過(guò)程,如圖5所示。
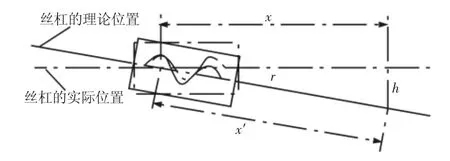
圖5 絲杠軸誤差示意圖Fig.5 Schematic Diagram of Screw Mounting Error

式中:Δa—絲杠轉(zhuǎn)角誤差;γ—安裝造成的絲杠偏角。
綜上所述,誤差傳遞函數(shù)為:

4.2 .3基于蒙特卡洛法求解誤差傳遞函數(shù)
蒙特卡洛法[9-10],是一種試驗(yàn)數(shù)學(xué),它利用隨機(jī)數(shù)進(jìn)行統(tǒng)計(jì)試驗(yàn),以求得的統(tǒng)計(jì)特征值(如均值、概率等)作為待解問(wèn)題的數(shù)值解。
假設(shè)待求量x是隨機(jī)變量ξ的數(shù)學(xué)期望E(ξ),那么近似確定x的方法是對(duì)ξ進(jìn)行N次重復(fù)抽樣,產(chǎn)生相互獨(dú)立的ξ值的序列 ξ1,ξ2,…,ξN,其算術(shù)平均值為 ξN,根據(jù)大數(shù)定理有:

故當(dāng)N充分大時(shí),可用ξN作為x的估計(jì)值。
依據(jù)蒙特卡洛法,利用Matlab求解調(diào)焦單元誤差傳遞函數(shù)(4),取 N=10000,得 σa=0.0014,σR=0.0045mm,σb=0.0020。
①空回誤差
x1=5.6×10-3mm<0.01mm,滿足設(shè)計(jì)要求。
②加工誤差
x2=0.0045mm,現(xiàn)有加工水平可實(shí)現(xiàn),分配合理。
③安裝誤差
x3≈2.44×10-3mm<3μm,現(xiàn)有裝配水平可實(shí)現(xiàn),分配合理。
④定位精度ΔH(焦面的實(shí)際移動(dòng)距離與理論移動(dòng)距離之差)ΔH最大值為0.0045mm<0.005mm,滿足設(shè)計(jì)要求。
⑤調(diào)焦分辨力計(jì)算f1
f1=R×[sin(an)-sin(an-1)]×cosb,已知 R=4mm,b=0.0020,傳動(dòng)比i=30,電機(jī)步進(jìn)角為0.9°,an和an-1分別為電機(jī)轉(zhuǎn)動(dòng)n步和n-1步時(shí)偏心軸相對(duì)初始位置的轉(zhuǎn)角。計(jì)算得f1<2.1μm。
⑥焦面晃動(dòng)量主要是安裝誤差造成的,其原理,如圖6所示。
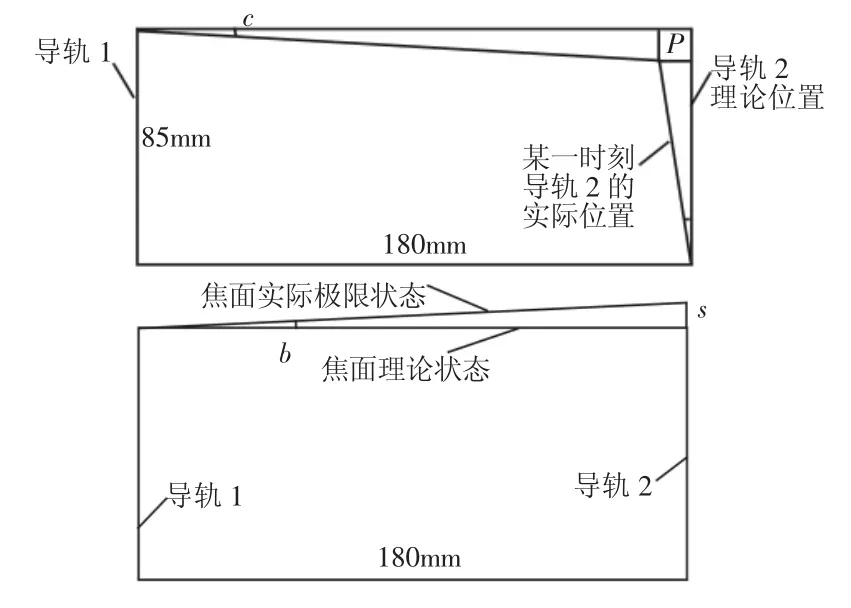
圖6 安裝誤差對(duì)焦面晃動(dòng)量的影響原理圖Fig.6 Schematic Diagram of Influence of the installation Error on the Momentum of the Focusing Plane
查手冊(cè),取 p=10μm,s=3μm,經(jīng)計(jì)算焦面全程晃動(dòng)量為 3.44”,滿足設(shè)計(jì)要求。
依據(jù)蒙特卡洛法,利用Matlab求解調(diào)偏流誤差傳遞函數(shù)(8),取 N=10000,得 Δa=0.0045,γ=0.0040 。
①空回誤差
x1=Δa=0.0045=16.2″,滿足設(shè)計(jì)要求。
②安裝誤差
x2max=×sinγ≈1μm(絲杠有效長(zhǎng)度 l=60mm),滿足設(shè)計(jì)要求。
④調(diào)偏流分辨力f2
f2=,已知傳動(dòng)比i=30,電機(jī)步進(jìn)角為0.9°,an和an-1分別為電機(jī)轉(zhuǎn)動(dòng)n步和n-1步時(shí)絲杠的轉(zhuǎn)角。計(jì)算得 f2<0.18″。
⑤焦面全程晃動(dòng)量
軸線最大偏差為1μm,考慮齒輪嚙合的徑向跳動(dòng),將焦面垂直跳動(dòng)誤差控制在2μm,經(jīng)計(jì)算焦面晃動(dòng)量約為6.88",滿足設(shè)計(jì)要求。
5 結(jié)論
在分析空間寬幅相機(jī)的光學(xué)系統(tǒng)特點(diǎn)及其對(duì)調(diào)焦和調(diào)偏流要求的基礎(chǔ)上,設(shè)計(jì)了一套一體化焦面二維調(diào)整機(jī)構(gòu),具有結(jié)構(gòu)緊湊,定位精度高,易于裝調(diào),可實(shí)現(xiàn)大尺寸焦面拼接等特點(diǎn)。機(jī)構(gòu)總重12kg,調(diào)焦行程4mm,調(diào)偏流范圍5°,基于蒙特卡洛法的誤差分配結(jié)果表明:執(zhí)行機(jī)構(gòu)的調(diào)焦單元定位精度優(yōu)于0.0045mm,空回優(yōu)于0.01mm,分辨力優(yōu)于2.1μm,焦面全程晃動(dòng)量為3.44";調(diào)偏流單元空回誤差為16.2",定位精度為1.48",調(diào)偏流分辨力優(yōu)于0.18",焦面全程晃動(dòng)量為6.88",各項(xiàng)指標(biāo)均滿足設(shè)計(jì)要求,適合在寬視場(chǎng)、長(zhǎng)焦距的高分辨力空間光學(xué)相機(jī)中使用。
[1]賈學(xué)志,王棟,張雷.輕型空間相機(jī)調(diào)焦機(jī)構(gòu)的優(yōu)化設(shè)計(jì)與精度試驗(yàn)[J].光學(xué)精密工程,2011,19(8):1824-1831.(Jia Xue-zhi,Wang Dong,Zhang Lei.Optimizing design and precision experiment of focusing mechanism in lightweight space camera[J].Opt.Precision Eng,2011,19(8):1824-1831.)
[2]鮑赫,楊利偉,姜肖楠.空間光學(xué)相機(jī)調(diào)偏流機(jī)構(gòu)設(shè)計(jì)[J].光電工程,2012,39(6):22-27.(Bao He,Yang Li-wei,Jiang Xiao-nan.Design of draft adjusting mechanism for space optical camera[J].Optoe.Eng,2012,39(6):22-27.)
[3]柴方茂,樊延超,辛宏偉.焦面二維精密調(diào)整機(jī)構(gòu)研究[J].光電工程,2014,41(1):6-11.(Chai Fang-mao,F(xiàn)an Yan-chao,Xin Hong-wei.The research of twodimensional precision adjustment mechanism for focal plane[J].Optoe.Eng.,2014,41(1):6-11.)
[4]馬宏,王金波.誤差理論與儀器精度[M].北京:兵器工業(yè)出版社,2007.(Ma Hong,Wang Jin-bo.The Error Theory and Precision of Instrument[M].Beijing:Weapons Industry Press,2007.)
[5]楊會(huì)生,張銀鶴,柴方茂.離軸三反空間相機(jī)調(diào)焦機(jī)構(gòu)設(shè)計(jì)[J].光學(xué)精密工程,2015,21(4):948-954.(Yang Hui-sheng,Zhang Yin-he,Chai Fang-mao.Design of focusing mechanism for off-axis TMA space camera[J].Opt.Precision Eng.,2013,21(4):948-954.)
[6]張海青,張立平,王智.航天立體測(cè)繪相機(jī)調(diào)焦機(jī)構(gòu)的設(shè)計(jì)與實(shí)驗(yàn)研究[J].機(jī)械設(shè)計(jì)與制造,2009(4):57-59.(Zhang Hai-qing,Zhang Li-ping,Wang Zhi.Design and experimental research on focusing mechanism of aerial stereo mapping camera[J].Machinery Design&Manufacture,2009(4):57-59.)
[7]劉磊,曹國(guó)華.大視場(chǎng)長(zhǎng)焦面光學(xué)遙感器雙凸輪式焦面調(diào)焦機(jī)構(gòu)[J].光學(xué)精密工程,2012,20(7):1939-1944(Liu Lei,Cao Guo-hua.Double cam focusing mechanism of space camera with wide field and long-focal-plane[J].Opt.Precision Eng,2012,20(7):1939-1944.)
[8]王書新,李景林,劉磊.大尺寸焦平面空間相機(jī)調(diào)焦機(jī)構(gòu)的精度分析[J].光學(xué)精密工程,2010,18(10):2239-2243.(Wang Shu-xin,Li Jing-lin,Liu Lei.Accuracy analysis of focusing mechanism in space camera with long-focal-plane[J].Opt.Precision Eng.,2010,18(10):2239-2243.)
[9]李自良,黃惠明,王乃衛(wèi).基于蒙特卡羅方法的誤差傳播與誤差分配計(jì)算[J].裝備指揮技術(shù)學(xué)院學(xué)報(bào),2003,14(3):98-101.(Li Zi-liang,Huang Hui-ming,Wang Nai-wei.Calculation of the error progagation and error distribution based on Monte Carlo method[J].Journal of the Academy of Equipment Command&Technology,2003,14(3):98-101.)
[10]朱陸陸.蒙特卡洛方法及應(yīng)用[D].武漢:華中師范大學(xué),2014.(Zhu Lu-lu.The Monte Carlo method and application[D].Wuhan:Cntral Chain Normal University,2014.)
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
