無舵機轉向系統原理分析與控制研究
2018-03-21 05:47:57闞英哲龍克俊謝小洪
機械設計與制造 2018年3期
羅 勇,闞英哲,龍克俊,謝小洪
(重慶理工大學 重慶汽車學院,重慶 400054)
1 引言
現有的轉向設計一般是針對于舵機轉向,無舵機轉向在目前的研究領域中仍處于一個尚未開發的階段。然而,無舵機轉向有著舵機轉向并不具備的許多優勢。舵機轉向需要完整的舵機設備以及相配套的機械結構,使其機械機構變得復雜,空間結構變大。因此一些結構本來就簡單或者希望減小體積的小車并不適合采用舵機轉向。例如在工廠里運送貨物的平板車,本身結構簡單,實現電機控制的最優方法是采用無舵機轉向。無舵機轉向是依靠安裝在前端且配有電動機的左右車輪,利用其轉速差來實現的。在這些小車上采用無舵機轉向既可以簡化小車的機械結構,又可以實現靈敏穩定的轉向,在一些特定情況下,無舵機轉向要大大優于舵機轉向。因此,對于無舵機轉向的研究,可以為不需要舵機或機械結構無法添加舵機的設備提供新的思路。
2 無舵機轉向原理分析
無舵機轉向即為不使用舵機轉向,而是采用固定在軸承上、角度不變的左右兩個前車輪的轉速差來實現轉向。為了配合左右車輪轉速差實現轉向,則兩個后輪采用萬向輪。為了方便無舵機轉向的原理分析,我們假設整個車體為一個平板,兩前輪固定在軸承上與電機相連,由左右兩個電機分別驅動。下面我們對其進行轉向的原理分析。
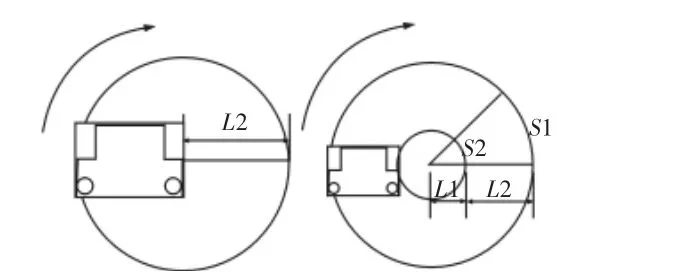
圖1 運行軌跡圖Fig.1 Running Track Diagram
首先,我們假設右車輪的車速為0,左車輪以一固定轉速轉動,則車的運動軌跡是一個圓,圓的半徑即車的寬度L2,如圖1(a)所示。假設左右車輪以不同的固定速度運行,且左邊的速度VL大于右邊的速度VR,則平板車的運行軌跡是一個同心圓,如圖1(b)所示。
設左輪在0.5s內轉過的路程為S1,右輪在0.5s內轉過的路程為S2。截取極短時間內小車的行駛轉角,取同心圓中的一個扇形,根據扇形公式得:

式中:S1、S2—左、右輪在0.5s內轉過的路程;L1—車右輪距轉向圓心的距離;L2—車寬;α— 0.5s內的轉角;vL、vR—左、右車輪轉速。
因為兩個扇形的圓心角相等,故:

轉向半徑L=L1+L2。
已知轉向半徑L,左輪行駛距離S1。根據扇形弧長公式計算轉向角

假設在右轉向過程中,轉速控制對象只有左車輪,右車輪的車速保持不變,故等式右邊的變量只有vL,而vR和vR決定的其他變量則視為常數。

式子兩邊同時對時間求導,將目標轉角α作為控制系統輸入值,右輪的轉速vL作為輸出值,對該式進行拉式變換,將轉向角轉化為弧度制,左輪轉速vL與轉向角α之間的傳遞函數為:

通過電機方程式線性化后的增量方程,建立起傳遞函數形式的數學模型,根據電磁、極點過程分離處理的原則,在研究電壓由原來的ua0變到ua0+Δua的電磁過度過程時,設電流相應地由ia0變化至ia0+Δia,電磁轉矩也由T0變到T0+ΔT,但轉速認為不變。這樣電壓躍變前后的電路方程為[1]:
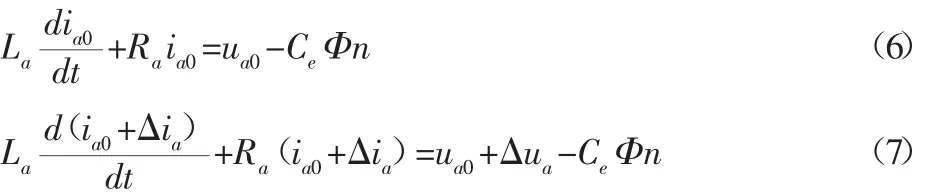
式中:ua—電樞電壓(V);ia—電樞電流(A);La、Ra—電樞電感(H)、電樞電阻(Ω);Φ—每級磁通(Wb);Ce—直流電機電勢常數。
將上面的兩式相減,可求得電壓增量Δua和電流增量Δia之間的傳遞函數,在這個電流增量Δia的作用下,將產生轉矩增量ΔT=CtΦΔia。如負載轉矩不變,則ΔT全用于自加速,于是求得電壓增量Δua與轉速增量Δn之間的傳遞函數為:

式中:Ce、Ct—直流電機電勢常數;Ta—電樞回路時間常數;Tm—
機電時間常數(s);J—轉動慣量(N·m·s·min/r)。
結合前面的分析及考慮直流電機的一般參數,得到電樞電壓u與轉向角α之間的傳遞函數為:

3 無舵機轉向控制系統
傳統PID控制系統運行過程中參數整定困難,控制進程中各種信號量以及評價指標不易定量表示,工況的變化也常常使控制系統偏離工作點,致使整定好的系統品質惡化[2]。模糊PID控制算法,既具有模糊控制靈活、響應快、適應性強等優點,又具有PID控制精度高的特點,因此可以適用于目標轉角不斷變化的無舵機轉向系統中。通過對偏差的智能化處理,引入智能分段控制概念,根據實際轉角與目標轉角的差值大小,改變PID中的控制參數,以自動適應調整轉速的控制響應速度。
在無舵機轉向控制系統中,根據目標轉角與實際轉角的差值e和差值變化率de/dt來自整定PID各項參數。
3.1 模糊PID控制器設計

式中:u(k)—第k個采樣時刻控制器輸出量;e(k)—第k個采樣時刻控制器輸入量(偏差信號);KP,KI,KD—比例、積分、微分系數。
根據不同的e和ec總結出以下一套KP,KI,KD的整定原則:(1)當e較大時,為使系統可以較快地改變轉速信號,應取較大的KP和較小的KD,同時為避免出現較大的超調,通常取較小的KI值。(2)當e中等時,為使系統具有較小的超調量,KP要取小些,KI和KD的取值大小要適中,KD對系統響應影響較大,應取得小一些。(3)當e較小時,為使系統有較好的穩態性能,同時避免在平衡點出現震蕩,KP和KI均應取的大一些,當ec較大時KD取值小一些;當ec較小時KD可取得大一些。
在線運行過程中,控制系統通過對模糊邏輯規則的結果處理、查表和運算,完成對PID參數的整定。其控制流程圖,如圖4所示。
將偏差e和偏差變化率ec作為模糊控制器的輸入,PID控制器KP,KI,KD作為變化量輸出。語言變量輸入量e、ec和輸出量KP,KI,KD均選取 7 個語言值:PB,PM,PS,Z,NS,NM,NB。
選定輸入量 e、ec 論域均為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},輸出量論域定為[-3,3]。選擇在論域范圍內均勻分布的三角形函數作為系統的隸屬度函數,其靈敏度較高。
模糊控制規則是對專家的理論知識和大量實驗數據分析的總結,結合2.1中PID自整定原則,歸納出控制規則,如表1所示。
離散PID控制規律為:

表1 PID參數控制規則Tab.1 PID Parameter Control Rules
3.2 基于模糊PID控制的系統仿真
在本系統中,設定目標轉角由0rad變化為5rad,為了更好地顯示模糊PID控制的控制效果,將其仿真模型同PID控制放在一起,如圖2所示。

圖2 模糊PID控制仿真Fig.2 Simulation of Fuzzy PID Control
設置仿真時間為30s,系統的階躍響應輸出曲線,如圖3所示。

圖3 模糊PID控制仿真曲線Fig.3 Simulation Curve of Fuzzy PID Control
由此可見,模糊PID控制雖然結構復雜,但控制效果有明顯的優勢,上升時間短,超調量較小,系統調節時間短,響應速度快,穩定性好。本系統可以在短時間內完成對無舵機轉向的控制,并且控制過程穩定。
下面測試系統的跟蹤特性,系統的正弦信號響應輸出曲線,如圖4所示。
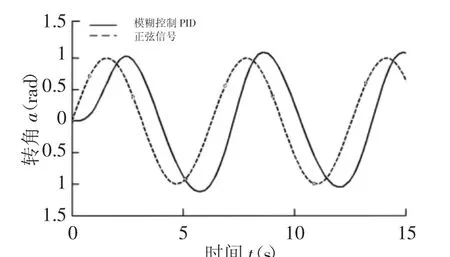
圖4 模糊PID控制跟蹤特性曲線Fig.4 Tracking Characteristic Curve of Fuzzy PID Control
由圖4可見,隨著目標轉角信號的不斷變化,雖然有些延遲,但是能在短時間內將當前轉角調整至目標轉角。結合無舵機轉向調節的具體情況分析,本系統是具有較好跟蹤特性的。
4 實驗驗證
為了進一步驗證雙模糊PID控制系統對無舵機轉向的控制效果,利用自制的平板代步車作為實驗對象,代步車結構圖,如圖5所示。將控制系統編寫為程序,下載至代步車的控制器中。代步車有兩個壓力傳感器置于使用者腳下,通過使用者腳下給予的壓力,控制左右車輪轉速,從而實現轉向控制。在代步車中,利用模糊控制根據使用者腳下的電壓差來確定使用者的目標轉角,作為無舵機轉向控制中的目標轉角。
在空曠的平地上放置4個圓錐形障礙,由駕駛員駕駛平板代步車按“8字”形繞樁,在第四個樁時繞圓圈返回再次完成“8字”形繞樁。在實驗過程中,通過藍牙串口模塊將平板代步車的左右車輪轉速回傳至電腦。按照前文所述無舵機轉向原理分析中的計算方法,將轉角計算公式輸入Matlab的M文件中,由matlab繪制出實時轉角曲線。實物平板代步車及實驗方法,如圖5所示。

圖5 代步車結構圖與實驗布置Fig.5 Scooter Structure Diagram and Experimental Arrangement
在實驗中,駕駛員成功完成了平穩快速的繞樁實驗過程,并得到實時轉角圖像,如圖6所示。
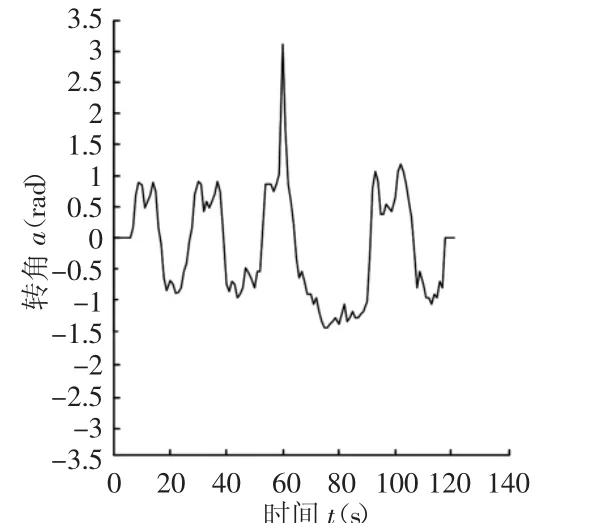
圖6 實時轉角圖像Fig.6 Real Time Rotation Angle Image
由圖像可知,在每次繞樁過程當中,轉向角會有小范圍的波動,是由駕駛員試探性調整轉角造成的,證明轉角的變化會隨著駕駛員的意圖而及時調整。在(60~70)s之間,在第四個樁的大轉角繞行過程中,轉角會根據使用者意圖變化至很大。可見本系統不僅能在小轉角變化范圍內實現穩定控制,而且在大轉角變化范圍內仍可以靈敏且平穩地控制轉角變化。
5 結語
(1)研究分析了無舵機轉向原理,并推導了無舵機轉向角的計算公式。
(2)基于模糊PID控制,設計了無舵機轉向角控制系統,并對控制系統進行了仿真分析,得到的仿真結果是本系統能在短時間內完成對無舵機轉向的控制,控制過程穩定,并且具有較好的跟蹤特性。
(3)以自制平板代步車為實驗對象,驗證了所設計的控制系統在實際運用中的控制效果,得到的實驗結果驗證本系統達到了預期的設計要求。
[1]賀益康,許大中.電機控制[D].杭州:浙江大學出版社,2010(5).(He Yi-kang,Xu Da-zhong.Motor control[D].Hangzhou:Zhejiang University Press,2010(5).)
[2]王述彥,師宇,馮忠緒.基于模糊PID控制器的控制方法研究[J].機械科學與技術,2011(1):166-172.(Wang Shu-yan,Shi Yu,Feng Zhong-xu.Research on the control method of fuzzy PID controller[J].Mechanical Science and Technology,2011(1):166-172.)
[3]韋慶志,李正明,孫俊.基于模糊自適應PID控制的鍋爐過熱蒸汽溫度控制系統[J].機械設計與制造,2010(7):173-175.(Wei Qing-zhi,Li Zheng-ming,Sun Jun.Boiler superheated steam temperature control system based on fuzzy adaptive PID control[J].MachineryDesign and Manufacture,2010(7):173-175.)
[4]舒志兵,周瑋,李運華.交流伺服運動控制系統[D].北京:清華大學出版社,2006(3).(Shu Zhi-bing,Zhou Wei,Li Yun-hua.AC servo motion control system[D].Beijing:Tsinghua University Press,2006(3).)
[5]陳鵬,段鳳陽,張慶杰.基于模糊PID的無人機姿態控制器的設計[J].彈箭與制導學報,2015(1):9-11.(Chen Peng,Duan Feng-yang,Zhang Qing-jie.Design of UAV posture controller based on fuzzy PID[J].Journal of Missile and Guidance,2015(1):9-11.)
[6]劉海珊,陳宇晨.無刷直流電機PID控制系統仿真及實驗研究[J].系統仿真學報,2009(16):5157-5160.(Liu Hai-shan,Chen Yu-chen.Simulation and experimental research on PID control system of brushless DC motor[J].Journal of System Simulation,2009(16):5157-5160.)
[7]李毅,溫正忠.風力發電偏航系統的PID-Fuzzy分段復合控制研究[J].機械設計與制造,2007(4):54-55.(Li Yi,Wen Zheng-zhong.Research on PID-Fuzzy segment composite control of wind power generation yaw system [J].MachineryDesign and Manufacture,2007(4):54-55.)
[8]仇成群,劉成林,沈法華.基于Matlab和模糊PID的汽車巡航控制系統設計[J].農業工程學報,2012(6):197-202.(Chou Li-qun,Liu Cheng-lin,Shen Fa-hua.Design of vehicle cruise controlsystembasedonMatlaband fuzzy PID[J].Journal of Agricultural Engineering,2012(6):197-202.)
[9]郭景華,胡平,李琳輝.基于遺傳優化的無人車橫向模糊控制[J].機械工程學報,2012(6):76-82.(Guo Jing-hua,Hu Ping,Li Lin-hui.Lateral fuzzy control of unmanned vehicle based on genetic optimization[J].Journal of Mechanical Engineering,2012(6):76-82.)
[10]姜杉,馮文浩,楊志永.基于模糊PID調節的核磁兼容機器人氣動控制技術[J].機器人,2012,34(5):521-538.(Jiang Shan,Feng Wen-hao,Yang Zhi-yong.Dynamic control technology of nuclear magnetic compatibility based on fuzzy PID control[J].The Robot,2012,34(5):521-538.)
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52
