淺談《工業機器人技術及應用》教學實驗平臺開發
2018-03-16 01:00:34張秀香牛曉飛唐永剛
山東化工 2018年4期
張秀香,牛曉飛,唐永剛
(宿州學院 機械與電子工程學院,安徽 宿州 234000)
《工業機器人技術及應用》是機械專業、電氣專業、電信專業的一門專業課,主要講授工業機器人的發展概況及分類,工業機器人的機械結構和運動控制,手動操縱工業機器人,初識工業機器人的作業示教,搬運、碼垛、焊接、涂裝、裝配機器人及其操作應用等相關內容[1]。全面、詳細地闡述工業機器人的基礎理論知識和應用技術,涉及知識點多、實操性強,內容繁多,學生掌握難度大。目前《工業機器人技術及應用》教學僅以理論講授為主,缺乏實物模擬訓練,實踐性和創造性差。在工業機器人已經成為衡量一個國家制造水平和科技水平重要標志的時代,培養掌握工業機器人應用技術的工程技術人才,滿足社會發展的需求,顯得尤其緊要[2]。因此,增設一種基于典型工業機器人應用技術的可視化和實踐性實驗教學--微型智慧工廠,使課程教學直觀生動、便于理解、易于掌握,從而激發學生的學習興趣,鍛煉學生實踐能力,培養學生創新意識,具有重要的意義。
1 《工業機器人技術及應用》教學方式存在的問題
《工業機器人技術及應用》為機電專業課,在進行教學時,專業性是比較強的,涉及理論和內容繁多。目前的《工業機器人技術及應用》課程教學存在的主要問題有:
(1)國內各大高校《工業機器人技術及應用》的教學方式主要以理論講授為主,僅僅圍繞課本中工業機器人應用案例,實踐教學環節薄弱,缺乏啟發性[3]。比如,在機器人運動軸與坐標系、認識和使用示教器、搬運、碼垛、焊接、涂裝、裝配機器人運動軌跡程序編寫及調試等實操理論進行講解時,單單依賴語言及PPT圖片來描述是不足的,完全沒有說服力,導致學生認識不強,課堂興趣平淡乏味。
(2)應用型教材書目較少。教材大多以講解機器人結構設計、操作手運動學和動力學、機器人控制等機械和控制系統方面的知識為重點,而應用型教材相對較少,學生缺少實踐實操能力。這種重視理論知識、忽視應用能力的培養,導致學生局限于理論設計方法,綜合分析問題能力薄弱。由于學生的應用實踐能力匱乏,難以滿足工業現場對工業機器人操作者的使用要求[4-5]。
(3)工業機器人應用中,包括在線示教和離線編程。離線編程軟件中,機器人和設備模型均為三維顯示,可直觀設置、觀察機器人的位置、動作與干涉情況。離線編程可以鍛煉學生的實際操作能力,但是出于生產現場的復雜性、作業的可靠性等方面的考慮,也只能在工業機器人應用認識上有一定的提高,具有很大的局限性[6]。
2 微型智慧工廠實驗平臺
2.1 智慧工廠的科學意義
智慧工廠是現代工廠信息化發展的新階段,是在先進自動化工廠的基礎上,利用物聯網的計算和設備監控技術加強信息管理和服務;清楚掌握產銷流程、提高生產過程的可控性、減少生產線上人工的干預、即時正確的采集生產線數據,以及合理的生產計劃編排與生產進度[7]。主要包括如下技術:先進制造技術、制造自動化技術、工業工程管理技術、物聯網技術。根據目前科技發展和教學方向,在制造生產線上增設軟硬件設施,包括自動化倉儲系統、AGV小車、數控系統、RFID射頻識別、工位看板、MES軟件、ERP、車輛在線追蹤功能的運輸管理模塊,整合系統建設模擬化微型智能工程。基于物聯系統采用先進的物聯網技術、自動化技術、網絡技術和實驗開設理念,將“先進制造”、“工業工程”學科與“企業應用”三方面在該系統中進行有機地融合,通過讓學生參與實踐,將課堂教學與工業現場、企業實踐結合,達到感性和理性認識的目的[8-9]。
2.2 微型智慧工廠的特點
設備首先要滿足特定的功能要求,達到學生模擬鍛煉的目的,同時要盡量降低投資成本,減少占地面積和噪聲污染,保證操作安全。因此,設備的微型化具有積極的意義。
(1)微型化可以減少硬件投資:動力及機械結構尺寸大幅降低,材料及加工成本較低,同時運輸及包裝費用也相應減少,硬件成本可以減少50%。
(2)節約空間:微型化與大型設備空間相比,減少70%。
(3)節約能耗:由于動力大幅降低,用電量及用氣量也大幅減少,能源可以減少80%。
(4)增加安全性:大型設備載荷大,運動部件重量大,安全性要求高。微型化產品載荷小,運動要求低,對人體安全性也降低,教學及科研方便動手變得簡單,真正達到教學與科研的工程目的。
2.3 系統概述
該平臺是以微型加工車間為對象,可實現工件加工、檢測和裝配生產流程,包含了柔性制造系統、物聯網及生產管理系統,是多學科技術集成的綜合實驗與研究平臺。平臺采用工業標準化設計,各實驗設備安裝可靠,機械結構、電氣控制回路、執行機構相對獨立,適合機械電子、自動化類相關專業的實訓教學,適合自動化技術人員進行工程訓練及技術應用開發。智慧工廠平臺組成模塊如圖1所示,主要包括9個單元模塊,它們分別為:
(1)自動化倉儲單元;
(2)柔性加工單元;
(3)自動檢測單元;
(4)自動裝配單元;
(5)人工裝配單元;
(6)電子標簽揀選單元;
(7)自動揀選單元;
(8)物聯網單元;
(9)生產管理與控制單元(MES/FMS)。

圖1 智慧工廠平臺組成模塊
硬件系統主要設備包含自動化立體倉庫、AGV導引車、六自由度工業機器人、數控機床系統、智能視覺檢測系統、智能輸送系統、RFID、PLC控制系統及中央控制系統等組成,可以實現對工件進行出入庫、生產加工、搬運、質量檢測、裝配等操作。是一條真實地小型生產線,使學生身臨其境,實現實訓與崗位培訓的合二為一,使教學培訓直觀和高效。系統軟件分MES軟件(上層:辦公層)、FMS軟件(中間層)、CNC層(下層:數控軟件、機器人軟件、倉庫軟件),智慧工廠軟件系統結構層次圖如圖2所示。
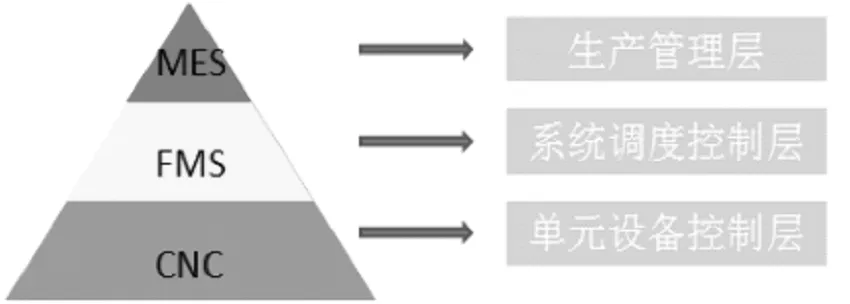
圖2 智慧工廠軟件系統結構層次圖
2.4 系統工位布局
微型智慧工廠的設備空間需要7×8m2,智慧工廠平臺組成模塊在工位的布局位置如圖3所示。

圖3 系統組成模塊工位布局圖
3 工業機器人在微型智慧工廠的具體應用
微型智慧工廠的引入,不僅能夠有效滿足《工業機器人技術及應用》的實踐性實驗教學要求,同時融會了機械、數控、工業技術總線、物流管理、PLC編程等多門學科知識,輔助機電專業的其他課程,使學生得到更好的模擬與訓練。本文只針對工業機器人的具體應用進行詳述。
3.1 六自由度機器人
選用六自由度垂直串聯關節式機器人系統,其廣泛應用在搬運、裝配、焊接及噴涂等工業生產現場,由操作機、控制系統、搬運/裝配/焊接/噴涂系統組成,末端手爪配備多種工具,可進行工件的吸附、夾取及裝配等操作,或配置視覺傳感系統、觸覺傳感系統,更好地完成工件的焊接或裝配作業。

表1 六自由度工業機器人主要參數表
機器人本體由六自由度關節組成,固定在滑移平臺上,如圖4所示,機器人具體參數如表1和表2所示。

表2 六自由度機器人系統配置及參數表

圖4 六自由度機器人
3.2 六自由度機器人應用案例設計
3.2.1 任務描述
微型智慧工廠選用六自由度搬運機器人系統,實驗學習需要掌握的內容如下:
(1)掌握搬運機器人的系統組成及機器人技術參數;
(2)掌握示教器的使用方法:示教器控制面板功能及各功能鍵作用。
(3)掌握通過示教器進行車床上下料、銑床上下料在線示教程序編寫。
3.2.2 應用方案
(1)學生學習搬運機器人系統:操作機、機器人控制柜、示教器、氣體發生裝置、末端執行器和滑移平臺,讓學生對搬運機器人系統具有初步認識,并介紹搬運機器人系統的工作流程。
(2)學生深入學習表1和表2中相關參數后,介紹搬運機器人的運動軸與坐標系,通過示教器演示六個軸的運動方式,學習工業機器人的自由度、工作空間、額定負載、最大工作度速和工作精度等主要參數。
(3)搬運機器人示教器各鍵功能熟悉,示教器如圖5所示。示教器主要由液晶屏幕和操作按鍵組成,是機器人的人機交互接口,機器人的所有操作基本上都是通過它來完成的。學生通過使用說明書學習示教器各鍵功能,手動設定安全移動速度,驅動演示搬運機器人軸的動作方式,加深理解機器人的自由度和動作范圍,準備進行在線示教。
(4)在線示教:由操作人員手持示教器引導,控制機器人運動,記錄機器人作業的程序點并插入所需的機器人命令來完成程序的編制,該過程稱為機器人的在線示教或直接示教[6,10]。搬運機器人上料軌跡如圖6和程序點說明如表3所示,要求學生利用示教器分別拾取圖6中車床上料的7個程序點,按照表3中程序點說明,實現搬運機器人的直線運動軌跡作業程序編寫及調試等工作,并根據搬運完成結果進行學生學習質量的評價。車床下料和銑床上、下料編程示教不再贅述。

圖5 示教器

圖6 搬運機器人上料軌跡 表3 程序點說明

程序點說明手爪動作程序點說明手爪動作1機器人原點-5搬運作業點放置2搬運臨近點-6搬運規避點-3搬運作業點抓取7機器人原點-4搬運中間點抓取
4 結語
針對《工業機器人技術及應用》課程教學方式中存在的問題,提出微型智慧工廠實踐性實驗平臺,并詳細說明了工業機器人的具體應用操作。微型智慧工廠加深了學生對工業機器人的結構組成、實踐操作的認識,通過機床上下料等在線示教編程訓練,掌握與其相關的應用操作技術,并且該平臺可進行多門學科知識的交叉學習,培養學生分析和解決實際問題的能力[11]。
[1] 蘭 虎.工業機器人技術及應用[M].北京:機械工業出版社,2015.
[2] 田 濤,鄧雙城,楊朝嵐,等.工業機器人的研究現狀與發展趨勢[J].新技術新工藝,2015(3):92-94.
[3] 程仙國,孫慧平,李占濤.《工業機器人技術》課程教學改革與實踐[J].寧波工程學院學報,2015,27(4):104-108.
[4] 戰 強,王東月.《機器人學》課程教學改革探討[J]. 北京航空航天大學學報(社會科學版),2010(2):117-120.
[5] 辛 穎,薛 偉.基于“慧魚模型”的機器人課程實驗教學改革探索[J].現代教育技術,2009,19(7):138-140.
[6] 李天旭.MOTOMAN工業機器人示教編程方法探究[J].通化師范學院學報,2010,31(8):48-51.
[7] 佚 名.智慧工廠-工業化4.0的戰略制高點[J].智慧工廠,2016(9):38-39.
[8] 侯瑞春,丁香乾,陶 冶,等.制造物聯及相關技術架構研究[J].計算機集成制造系統,2014,20(1):11-20.
[9] 張映鋒,趙曦濱,孫樹棟,等.一種基于物聯技術的制造執行系統實現方法與關鍵技術[J].計算機集成制造系統,2012,18(12):2634-2642.
[10] 李偉光,郭文鋒.不銹鋼廚具拉伸成型工序機器人系統設計與實現[J].組合機床與自動化加工技術,2012(8):81-84.
[11] 胡洪鈞,謝立敏,梁 曉,等.工業機器人實驗項目開發與實踐[J].實驗技術與管理,2015,32(9):201-204.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
快樂作文·低年級(2016年6期)2016-06-24 18:58:40
小天使·一年級語數英綜合(2014年6期)2014-07-22 23:32:38
智慧與創想(2013年7期)2013-11-18 08:06:04
故事作文·低年級(2009年10期)2009-10-20 04:28:46
