基于耦合控制的雙電機調速系統仿真分析
2018-03-16 07:24:07王飛
機械管理開發 2018年2期
王 飛
(山西焦煤集團西山煤電股份公司西曲礦,山西 古交 030200)
引言
目前全世界礦井工作面開采所用的采煤機牽引電機均為交流調速電機[1],與直流調速電機相比,該類型的電機節約制造成本,且調速穩定。隨著煤層開采厚度的不斷增加,對采煤機功率的要求也更高,如果采煤機牽引電機僅設置為1個,則電機的工作穩定性會下降[2],且電機較大,不利于采煤機割煤,故此時往往通過雙電機牽引采煤機。雙電機參數的不同往往造成兩個電機運行不同步以及功率不一致[3-4]。對采煤機牽引部雙電機不同協調控制方式下的優缺點進行比對分析可使采煤機牽引性能得到最大程度的發揮。國內外諸多專家學者通過采煤機整體模型的建立來研究其受力特征,但在采煤機牽引電機模型的分析上研究甚少,本文主要對采煤機雙電機調速系統進行仿真分析,從而為雙電機的協調控制提供一定依據。
1 交流調速電機的模型建立
為了對雙電機的協調控制進行仿真分析,先進行單個交流調速電機的模型建立,所建模型需要為定量分析電機的能量轉變提供基礎,由此建立模型時做出如下假設:
1)鐵芯的導磁系數是恒定不變的,不受渦流和磁滯等因素的影響;2)交流電機轉子在三維方向上均是對稱分布的;3)三相定子繞組和三相轉子繞組間的夾角均為120°,故在結構和空間上也是對稱的;
4)三相定子繞組和三相轉子繞組產生的磁動勢在三維空間中表現為正弦特征;
5)定子和轉子表面均較為平整光滑;
6)只分析氣隙基波磁場對交流電機的影響,而忽略其他作用。
三相繞組的轉動方向為逆時針,在上述假設基礎上可得定子繞組和轉子繞組在三維空間中分布的對稱性,由此得到三相繞組的縱向剖面圖,如圖1所示。
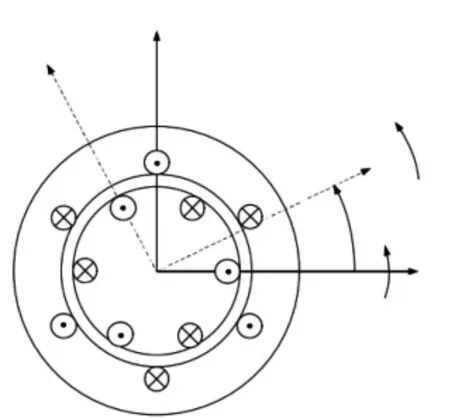
圖1 三相繞組的縱向剖面示意圖
2 交流調速電機的矢量控制系統
交流調速電機的內部結構較為復雜,如果可以把直流電機的數學物理模型適當轉變用于交流調速電機的模型分析中,則可以簡化計算過程。在電氣調速傳動系統中,直流電機可以發揮較好的動態性能,為了使直流電機這一性能充分應用于交流調速電機中,需要對其矢量控制系統進行研究。
2.1 變化坐標
交流調速電機的原始坐標極為復雜,通過進行合理的轉變坐標可以得到合理的交流調速電機物理模型,目前變化坐標的方式主要可分為:
1)三相靜止坐標系轉變為兩相靜止坐標系,如式(1)所示:
2)兩相靜止坐標系轉變為三相靜止坐標系,如式(2)所示:

3)兩相靜止坐標系轉變為兩相旋轉坐標系,如式(3)所示:

4)兩相旋轉坐標系轉變為兩相靜止坐標系,如式(4)所示:

2.2 電機矢量控制
采煤機交流的雙調速電機均通過變換矢量進行控制,這樣電機的轉矩和磁通均可進行單獨控制,使其容易達到直流電機的調速效能。交流電機變化矢量的過程可總結為:把通過矢量旋轉將三相定子繞組的控制量轉變為兩相交流控制量,通過式(2)獲得三相交流的控制量,并通過該參數來操控交流調速電機的工作,完成電機的變換矢量。
在雙電機調速系統建立仿真模型的基礎上得到了調速仿真結果,如圖2所示。
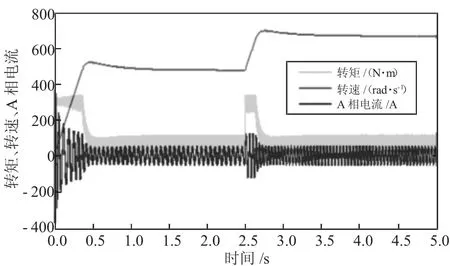
圖2 調速系統仿真結果示意圖
圖2主要得到了時間延長過程中電機轉矩、轉速以及A相電流的變化特征,從圖2中可以看出,雙電機調速系統的實際速率可以較好地跟蹤給定速率,同時電機調速效果良好。
3 雙電機調速系統的仿真分析
并行控制可以實現采煤機多個電機的協調運行,該控制方式主要是對多個電機同時施加信號,使電機不會發生時間滯后效應,同時使之進行同步協調運轉。基于此,建立并行控制的雙電機調速系統的仿真模型,所建模型中雙電機均受到50m的外載荷作用,電機牽引速率起始值為50 r/s,在5 s內速率升至85 r/s,模擬時間設置為10 s。本次模擬主要對雙電機在受到干擾的影響下系統運行的穩定性特征進行研究,如圖3和圖4所示。

圖3 電機1在受到干擾的影響下雙電機轉速變化示意圖
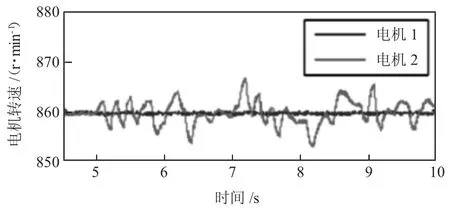
圖4 電機2在受到干擾的影響下雙電機轉速變化示意圖
從圖3和圖4中可以看出,受到干擾的電機其自身的轉速也會受到較大程度的影響,而另一個電機轉速不受影響,但二者轉速出現差值,最大值可到9 r/min,意味著雙電機無法保持同步協調轉動。究其原因,并行控制方式也是開環控制方式,兩個電機運行獨立、互不干擾,故其中一個電機受到擾動時另一個電機不受其影響,且在受到干擾情況下兩個電機無法保持同步運行,這也顯示了并行控制方式的最大弊端。而耦合控制方式可以建立雙電機轉動運行間的關聯性,具體控制方式為通過耦合控制器將雙電機運行過程中產生的轉速差值發送給轉速調節器,并利用轉速調節器來削弱該差值,使雙電機可以保持同步協調轉動。耦合控制方式的基本原理如圖5所示。
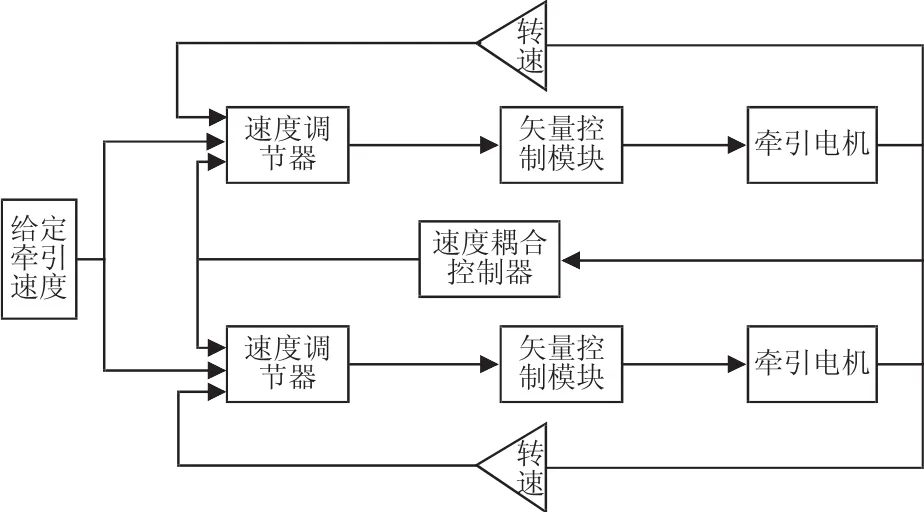
圖5 耦合控制方式的基本原理示意圖
本次建立耦合控制雙電機調速系統的仿真模型,電機牽引速率起始值為50 r/s,在5 s內速率升至85 r/s,模擬時間設置為10 s。本次模擬同樣主要對雙電機在受到干擾的影響下系統運行的穩定性特征進行研究,如下頁圖6、圖7所示。
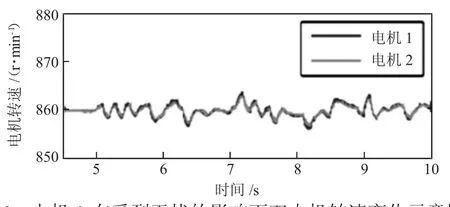
圖6 電機1在受到干擾的影響下雙電機轉速變化示意圖
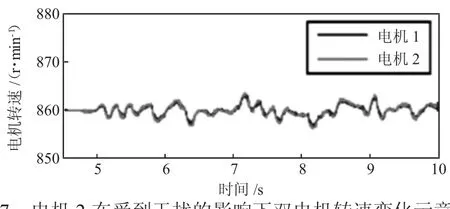
圖7 電機2在受到干擾的影響下雙電機轉速變化示意圖
從圖6、圖7中可以看出,受到干擾的電機其自身的轉速幾乎不會受到影響,雙電機的轉速始終保持在同一值,充分說明了耦合控制下轉速調節器削弱了雙電機轉速差值的有效性和及時性,雙電機在干擾影響下也會保持同步協調轉動。為了進一步證明耦合控制方式的高效性,對不同協調控制方式下雙電機轉速的偏差特征進行了研究,如圖8所示。
從圖8中可以看出,隨著時間的延長,不同協調控制方式下雙電機的轉速偏差可排為:并行控制>主從控制>耦合控制。主從控制條件下從電機的轉速受控于主電機,故該控制方式下雙電機的轉速偏差要小于并行控制。由于主從控制方式下雙電機的響應存在遲滯效應,所以轉速偏差一直存在。圖8更加充分證明了耦合控制雙電機調速系統的高效性。
4 結論
1)雙電機調速系統的實際速率可以較好地跟蹤對給定速率,同時電機調速效果良好。
2)并行控制下受到干擾的電機其自身的轉速會受到較大程度的影響,而另一個電機轉速不受影響,但二者轉速會出現差值,最大值可到9 r/min,意味著雙電機無法報紙同步協調轉動。

圖8 不同協調控制方式下雙電機轉速偏差隨時間的變化示意圖
3)耦合控制下受到干擾的電機其自身的轉速幾乎不受影響,雙電機的轉速始終保持在同一值,不同協調控制方式下雙電機的轉速偏差可排為:并行控制>主從控制>耦合控制,由此充分說明了耦合控制下轉速調節器削弱雙電機轉速差值的有效性和及時性。
[1]王騰飛.基于無源性的異步電機無速度傳感器控制系統的設計[D].蘭州:蘭州交通大學,2016.
[2]單長帥.雙電機齒輪同步驅動系統轉矩均衡控制[D].天津:天津工業大學,2016.
[3]袁天清,王雙翼.發電廠泵用大功率交流電機變極無差調速系統研究[C]//中共沈陽市委、沈陽市人民政府.第十二屆沈陽科學學術年會論文集(理工農醫).中共沈陽市委、沈陽市人民政府,2015(6):78-79.
[4]何浩,胡吉全,孫振寧.雙動力起升驅動系統的控制研究[J].起重運輸機械,2015(5):21-24.
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
防爆電機(2022年1期)2022-02-16 01:14:06
今日農業(2021年14期)2021-10-14 08:35:28
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
海峽姐妹(2020年8期)2020-08-25 09:30:18
當代貴州(2019年41期)2019-12-13 09:28:56
中國共青團(2015年7期)2015-12-17 01:24:38
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年4期)2014-02-27 14:07:18
山西大同大學學報(自然科學版)(2014年5期)2014-01-23 01:58:00
