基于Leader-Follower編隊(duì)的無(wú)人機(jī)協(xié)同跟蹤地面目標(biāo)制導(dǎo)律設(shè)計(jì)
2018-03-15 10:16:06張民夏衛(wèi)政黃坤陳欣
航空學(xué)報(bào) 2018年2期
張民,夏衛(wèi)政,黃坤,陳欣
南京航空航天大學(xué) 自動(dòng)化學(xué)院,南京 210016
隨著近年來(lái)科技水平的不斷提高,無(wú)人機(jī)(Unmanned Aerial Vehicle, UAV)從最初的目標(biāo)識(shí)別、通信中繼到偵查監(jiān)視、災(zāi)害評(píng)估等,其應(yīng)用領(lǐng)域得到了極大的擴(kuò)展,未來(lái)的應(yīng)用前景極其廣闊。無(wú)人機(jī)對(duì)地面目標(biāo)的自動(dòng)跟蹤是指無(wú)人機(jī)根據(jù)地面運(yùn)動(dòng)目標(biāo)指示(Ground Moving Target Indication, GMTI)給出的地面目標(biāo)位置、速度、航向等信息并結(jié)合無(wú)人機(jī)當(dāng)前的飛行狀態(tài)通過(guò)特定的跟蹤算法在無(wú)干預(yù)的條件下實(shí)現(xiàn)對(duì)地面靜止或運(yùn)動(dòng)目標(biāo)的持續(xù)跟蹤,是當(dāng)前無(wú)人機(jī)的一個(gè)重要的應(yīng)用方向[1-4]。相對(duì)于單架無(wú)人機(jī),多架無(wú)人機(jī)組成編隊(duì)對(duì)地面目標(biāo)進(jìn)行協(xié)同跟蹤具有更加明顯的優(yōu)勢(shì):① 可以擴(kuò)大單架無(wú)人機(jī)傳感器的作用范圍,降低丟失目標(biāo)的概率;② 可以提高對(duì)目標(biāo)運(yùn)動(dòng)狀態(tài)的估計(jì)精度,在應(yīng)用上可以提供更高的靈活性[5-8]。無(wú)人機(jī)協(xié)同跟蹤地面目標(biāo)制導(dǎo)律設(shè)計(jì)的主要難點(diǎn)在于如何使得多架無(wú)人機(jī)在自動(dòng)跟蹤地面目標(biāo)的同時(shí)能夠有效維持特定編隊(duì)。另一方面,不同于旋翼無(wú)人機(jī),在跟蹤靜止或低速目標(biāo)時(shí),固定翼無(wú)人機(jī)為了避免失速必須保持一定的巡航速度,因此最常用的跟蹤策略是采用盤(pán)旋跟蹤的方式,這種方式也稱為Standoff跟蹤[9-11]。同時(shí),無(wú)論單機(jī)還是編隊(duì),Standoff跟蹤方式由于需要持續(xù)盤(pán)旋,因此均存在一個(gè)明顯的不足,即這種方式只適合于跟蹤低速目標(biāo)[12-14],文獻(xiàn)[12]指出,采用Standoff跟蹤方式,地面目標(biāo)運(yùn)動(dòng)速度不能超過(guò)無(wú)人機(jī)最大巡航速度的30%。
本文提出了一種新的基于Leader-Follower編隊(duì)的固定翼無(wú)人機(jī)協(xié)同跟蹤地面目標(biāo)制導(dǎo)方法。首先,設(shè)計(jì)一種能夠克服對(duì)所跟蹤目標(biāo)速度限制的新型Standoff單機(jī)跟蹤制導(dǎo)律,用于Leader無(wú)人機(jī)對(duì)地面目標(biāo)的自動(dòng)跟蹤;然后,設(shè)計(jì)用于多架Follower無(wú)人機(jī)的Standoff跟蹤制導(dǎo)律和圓編隊(duì)相位協(xié)同制導(dǎo)律,使得Follower無(wú)人機(jī)均勻分布于圓周上,并且當(dāng)編隊(duì)進(jìn)入穩(wěn)態(tài)時(shí),F(xiàn)ollower無(wú)人機(jī)的速度將逐漸收斂于Leader無(wú)人機(jī)對(duì)應(yīng)的速度、相位角趨近于所要求的角度。仿真試驗(yàn)表明,本文提出的新型編隊(duì)跟蹤策略可以很好地跟蹤不同運(yùn)動(dòng)狀態(tài)的地面目標(biāo),并且比基于經(jīng)典李雅普諾夫向量法的制導(dǎo)方法具有更好的性能。
1 問(wèn)題描述
無(wú)人機(jī)飛行控制系統(tǒng)由內(nèi)回路(穩(wěn)定回路)和外回路(制導(dǎo)回路)構(gòu)成,在本文中認(rèn)為內(nèi)回路已經(jīng)設(shè)計(jì)完成,能夠很好地響應(yīng)外回路給出的制導(dǎo)指令,并且跟蹤移動(dòng)目標(biāo)時(shí)默認(rèn)無(wú)人機(jī)的速度高于目標(biāo)速度。在理想情況下,執(zhí)行Standoff跟蹤任務(wù)的無(wú)人機(jī)應(yīng)保持固定高度和轉(zhuǎn)彎半徑,同時(shí)圍繞被跟蹤對(duì)象做圓周運(yùn)動(dòng),因此通常可以僅考慮固定高度上的二維制導(dǎo)問(wèn)題。記ρ為無(wú)人機(jī)與目標(biāo)的相對(duì)距離,ρ∈[0,∞);ρd為期望距離;vu為無(wú)人機(jī)速度。
考察由式(1)描述的無(wú)人機(jī)二維質(zhì)點(diǎn)運(yùn)動(dòng)學(xué)模型[15-17]
(1)
(2)
在本文中,Leader無(wú)人機(jī)采用Standoff方式對(duì)地面目標(biāo)進(jìn)行自動(dòng)跟蹤,并且保持恒定的巡航速度,其在Frient-Serret坐標(biāo)系[7]下的幾何關(guān)系如圖1所示。


根據(jù)圖1幾何關(guān)系,無(wú)人機(jī)跟蹤地面目標(biāo)的二維模型可以表示為如式(3)所示的極坐標(biāo)形式:
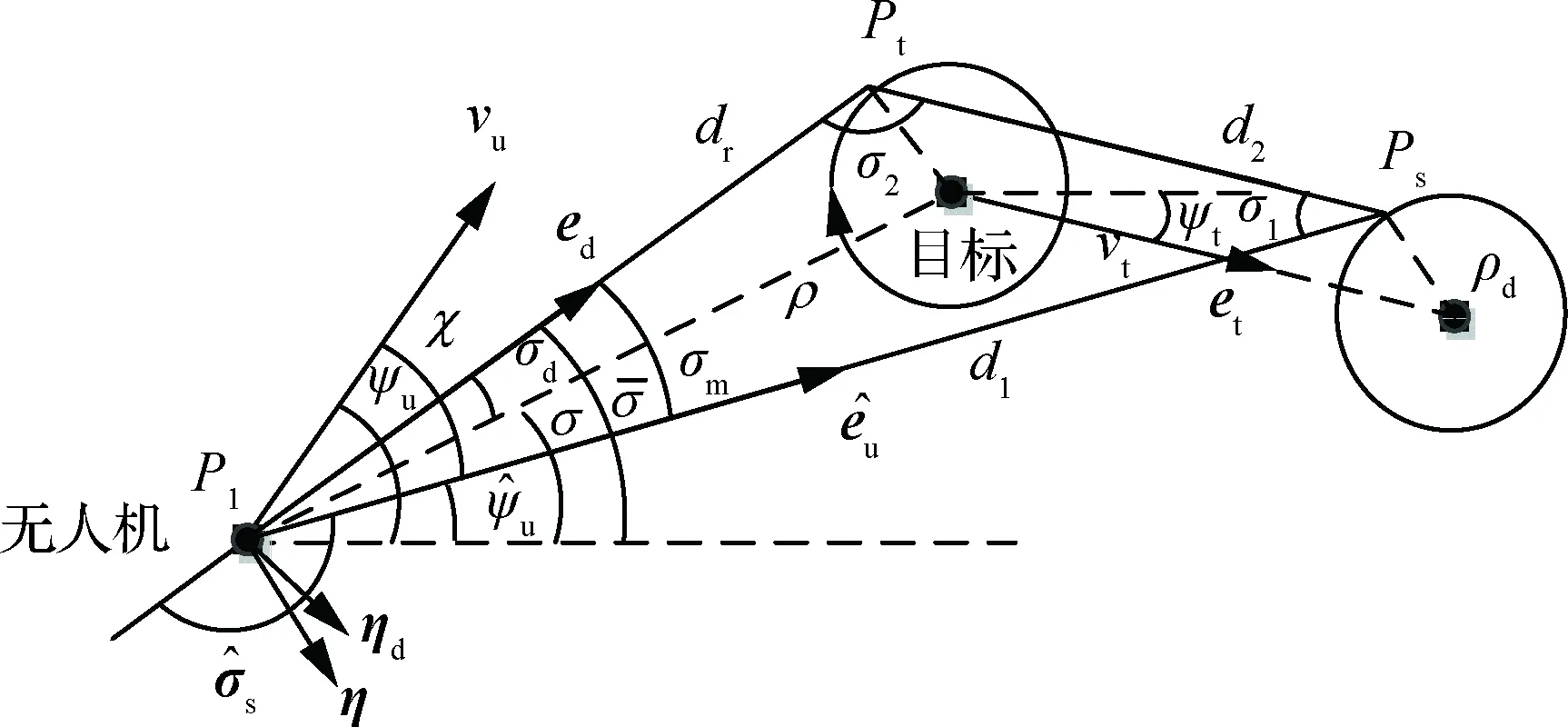
圖1 無(wú)人機(jī)Standoff跟蹤地面目標(biāo)幾何關(guān)系Fig.1 Geometry for Standoff tracking of a ground target
表1 變量定義Table 1 Definitions of variables
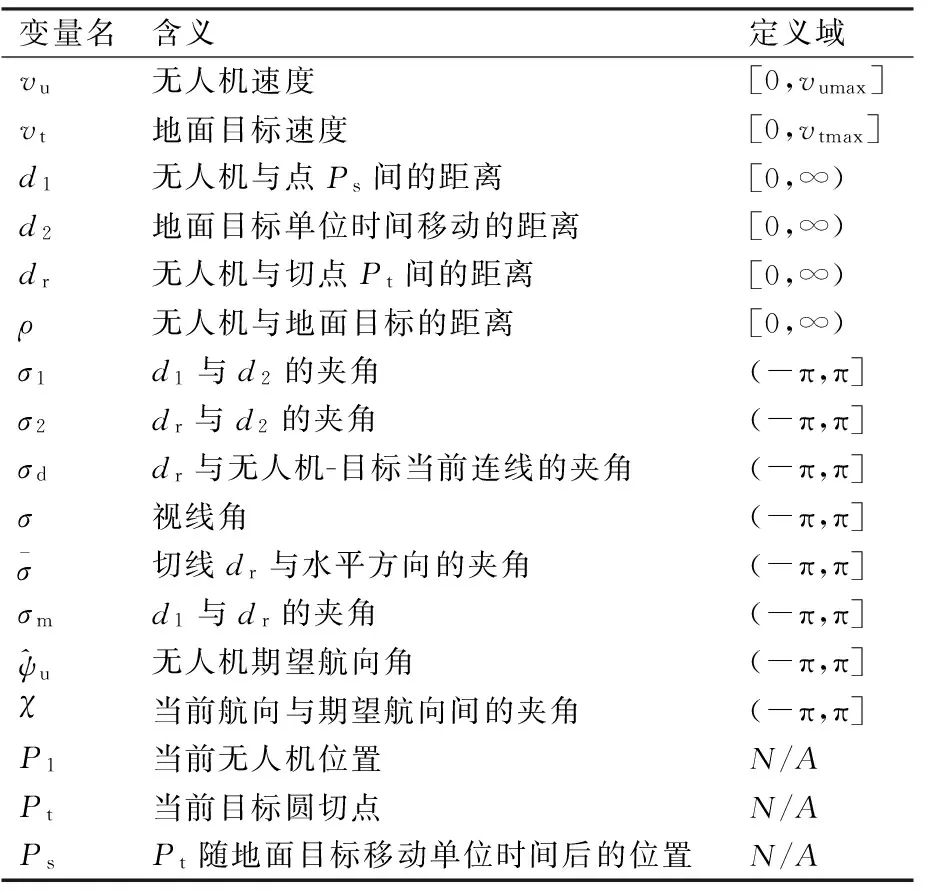
變量名含義定義域vu無(wú)人機(jī)速度[0,vumax]vt地面目標(biāo)速度[0,vtmax]d1無(wú)人機(jī)與點(diǎn)Ps間的距離[0,∞)d2地面目標(biāo)單位時(shí)間移動(dòng)的距離[0,∞)dr無(wú)人機(jī)與切點(diǎn)Pt間的距離[0,∞)ρ無(wú)人機(jī)與地面目標(biāo)的距離[0,∞)σ1d1與d2的夾角(-π,π]σ2dr與d2的夾角(-π,π]σddr與無(wú)人機(jī)-目標(biāo)當(dāng)前連線的夾角(-π,π]σ視線角(-π,π]σ切線dr與水平方向的夾角(-π,π]σmd1與dr的夾角(-π,π]^ψu(yù)無(wú)人機(jī)期望航向角(-π,π]χ當(dāng)前航向與期望航向間的夾角(-π,π]P1當(dāng)前無(wú)人機(jī)位置N/APt當(dāng)前目標(biāo)圓切點(diǎn)N/APsPt隨地面目標(biāo)移動(dòng)單位時(shí)間后的位置N/A
(3)
2 Leader無(wú)人機(jī)制導(dǎo)律設(shè)計(jì)
當(dāng)跟蹤地面目標(biāo)時(shí),無(wú)人機(jī)有順時(shí)針、逆時(shí)針2種飛行狀態(tài),為便于分析,在本文中僅采用順時(shí)針飛行方式,逆時(shí)針?lè)绞娇砂赐瑯拥姆椒ㄟM(jìn)行分析處理。
本文現(xiàn)提出無(wú)人機(jī)Standoff跟蹤制導(dǎo)律:
(4)
式中:
(5)
且
(6)
針對(duì)靜止目標(biāo)和運(yùn)動(dòng)目標(biāo)分別給出該制導(dǎo)律的穩(wěn)定性分析與證明。
2.1 靜止地面目標(biāo)
當(dāng)?shù)孛婺繕?biāo)靜止時(shí),有vt=0,d2=0,d1=dr,σm=0,則制導(dǎo)律式(4)可以簡(jiǎn)化為
(7)
在式(7)中
(8)
此時(shí)式(3)所示的無(wú)人機(jī)二維模型可以簡(jiǎn)化為
(9)
定理1無(wú)人機(jī)動(dòng)力學(xué)模型式(9)在制導(dǎo)律式(7)作用下,若滿足k1>0,k2<1,則無(wú)人機(jī)跟蹤靜止目標(biāo)的閉環(huán)系統(tǒng)漸近穩(wěn)定。
證明:

現(xiàn)提出李雅普諾夫方程為
(10)
對(duì)L求導(dǎo)可得
(11)

1)ρ≥ρd
由式(7)可得
再分為以下2種情況:




(12)
將式(12)代入式(11)可得
由式(7)可得




綜上所述,若滿足k1>0,k2<1,無(wú)人機(jī)Standoff跟蹤靜止地面目標(biāo)時(shí)的閉環(huán)系統(tǒng)漸近穩(wěn)定[18]。
2.2 運(yùn)動(dòng)地面目標(biāo)
首先證明如下引理。
引理1對(duì)于式(3)所示的無(wú)人機(jī)模型,當(dāng)無(wú)人機(jī)跟蹤運(yùn)動(dòng)地面目標(biāo)時(shí),有如下不等式成立:
(13)
證明:
在圖1中,顯然有如下向量關(guān)系成立:
(14)
兩邊平方得
(15)
即

兩邊求導(dǎo)可得
(16)
(17)
將式(16)代入得
(18)
(19)
對(duì)式(19)兩邊同時(shí)平方,則
(20)
整理得
(21)
(22)
定理2無(wú)人機(jī)動(dòng)力學(xué)模型式(3)在制導(dǎo)律式(4)作用下,若滿足k1>0,k2<1,則跟蹤運(yùn)動(dòng)目標(biāo)時(shí)的閉環(huán)系統(tǒng)漸近穩(wěn)定。
證明:
(23)

(24)
以下分3種情況分別證明。
1)ρ≥ρd
由式(4)可得

(25)
再分為如下2種情況:
①χ≥0
此時(shí)有
(26)
(27)
(28)
由式(4)可得
(29)
(30)
(31)
因此有
(32)
由式(4)可得
(33)
再分為如下2種情況:
(34)
(35)
綜上所述,若滿足k1>0,k2<1,無(wú)人機(jī)Standoff跟蹤運(yùn)動(dòng)地面目標(biāo)時(shí)的閉環(huán)系統(tǒng)漸近穩(wěn)定。
從上述證明過(guò)程可以看出,Leader無(wú)人機(jī)的制導(dǎo)律采用了一種使得無(wú)人機(jī)航向不斷逼近地面目標(biāo)牽連Standoff跟蹤圓切線方向的策略,通過(guò)幾何關(guān)系間接實(shí)現(xiàn)對(duì)跟蹤距離的控制,從而克服了傳統(tǒng)Standoff跟蹤制導(dǎo)律存在的對(duì)可跟蹤地面目標(biāo)的速度限制問(wèn)題。
3 Follower無(wú)人機(jī)制導(dǎo)律設(shè)計(jì)
假設(shè)在編隊(duì)中有N架Follower無(wú)人機(jī), 則第i(i=1,2,…,N) 架無(wú)人機(jī)的Dubins模型可描述為[19]
(36)
Follower無(wú)人機(jī)對(duì)Leader無(wú)人機(jī)Standoff跟蹤的幾何關(guān)系如圖2所示(以3架Follower無(wú)人機(jī)為例)。

圖2 Leader-Follower無(wú)人機(jī)編隊(duì)幾何模型Fig.2 Guidance geometry model of leader-follower UAVs
在本文中,多架Follower無(wú)人機(jī)需要維持一個(gè)以Leader無(wú)人機(jī)為中心的圓型編隊(duì)并且均勻分布于圓周上。同時(shí),要求Follower無(wú)人機(jī)的速度及航向角逐漸收斂于Leader無(wú)人機(jī)對(duì)應(yīng)的速度及航向角,其相對(duì)運(yùn)動(dòng)模型可描述為
(37)
式中:下標(biāo)‘0’表示Leader無(wú)人機(jī)。
同時(shí),假設(shè)Follower無(wú)人機(jī)通過(guò)通訊鏈路能夠獲取Leader無(wú)人機(jī)的飛行狀態(tài)信息,并且在Follower無(wú)人機(jī)之間具備基本的環(huán)形通訊拓?fù)浣Y(jié)構(gòu)。在此基礎(chǔ)上,本文現(xiàn)提出如下的Follower無(wú)人機(jī)制導(dǎo)律。
角速度制導(dǎo)律:
(38)
加速度制導(dǎo)律:
(39)
由式(38)和式(39)可以看出,F(xiàn)ollower無(wú)人機(jī)制導(dǎo)律除了對(duì)Standoff跟蹤距離和編隊(duì)相位角的控制外,還分別包含對(duì)Leader無(wú)人機(jī)航向角與速度偏差的控制,這是與經(jīng)典Standoff協(xié)同跟蹤制導(dǎo)律的主要差異所在。
定理3無(wú)人機(jī)編隊(duì)動(dòng)力學(xué)模型式(37)在制導(dǎo)律式(38)和式(39)作用下,若滿足kω>0,kv>0,則Follower無(wú)人機(jī)與Leader無(wú)人機(jī)之間的距離將逐漸趨近于ρd,F(xiàn)ollower無(wú)人機(jī)之間的相位差將逐漸趨近于2π/N,并且Follower無(wú)人機(jī)的速度與航向?qū)⒅饾u趨近于Leader無(wú)人機(jī)的速度與航向。
證明:
現(xiàn)提出李雅普諾夫方程為
(40)
對(duì)式(40)求導(dǎo)得
(41)

(42)
則有
(43)

4 仿真驗(yàn)證
為了驗(yàn)證本文提出的基于Leader-Follower編隊(duì)的跟蹤地面目標(biāo)架構(gòu)和制導(dǎo)律設(shè)計(jì)的合理性與有效性,以1架Leader無(wú)人機(jī)、3架Follower無(wú)人機(jī)組成的4機(jī)編隊(duì)為例,分別針對(duì)靜止目標(biāo)和運(yùn)動(dòng)目標(biāo)的跟蹤問(wèn)題進(jìn)行仿真驗(yàn)證,其中在變速目標(biāo)跟蹤問(wèn)題中不再將地面目標(biāo)的速度限制在無(wú)人機(jī)巡航速度的30%以內(nèi)。
在仿真開(kāi)始時(shí),無(wú)人機(jī)與地面目標(biāo)的初始狀態(tài)設(shè)定為:
1) Leader無(wú)人機(jī)(UAV #0)
① 位置為(0,-1 500) m;② 航向角為30°;③ 巡航速度為40 m/s;④ 制導(dǎo)指令輸出量限幅為0.1 rad/s。
2) Follower無(wú)人機(jī)
UAV #1
① 位置為(50,-1 150) m;② 航向角為-5°;③ 巡航速度為38 m/s;④ 制導(dǎo)指令輸出量限幅為0.1 rad/s。
UAV #2
① 位置為(-350,-1 750) m;② 航向角為120°;③ 巡航速度為41 m/s;④ 制導(dǎo)指令輸出量限幅為0.1 rad/s。
UAV #3
① 位置為(300,-1 700) m;② 航向角為60°;③ 巡航速度為40.5 m/s;④ 制導(dǎo)指令輸出量限幅為0.1 rad/s。
3) 地面目標(biāo)
① 位置為(0,0) m;② 航向角為30°;③ 巡航速度為0~36 m/s。
制導(dǎo)增益設(shè)定為
k1=1,k2=0.2,kv=1.5,kω=1.28。
4.1 靜止目標(biāo)
無(wú)人機(jī)編隊(duì)對(duì)靜止目標(biāo)跟蹤的軌跡、速度、航向角、相位角與相對(duì)距離分別如圖3~圖5所示。圖5(a)中Follower 2-1表示Follower 2與Follower 1間的相位角差。
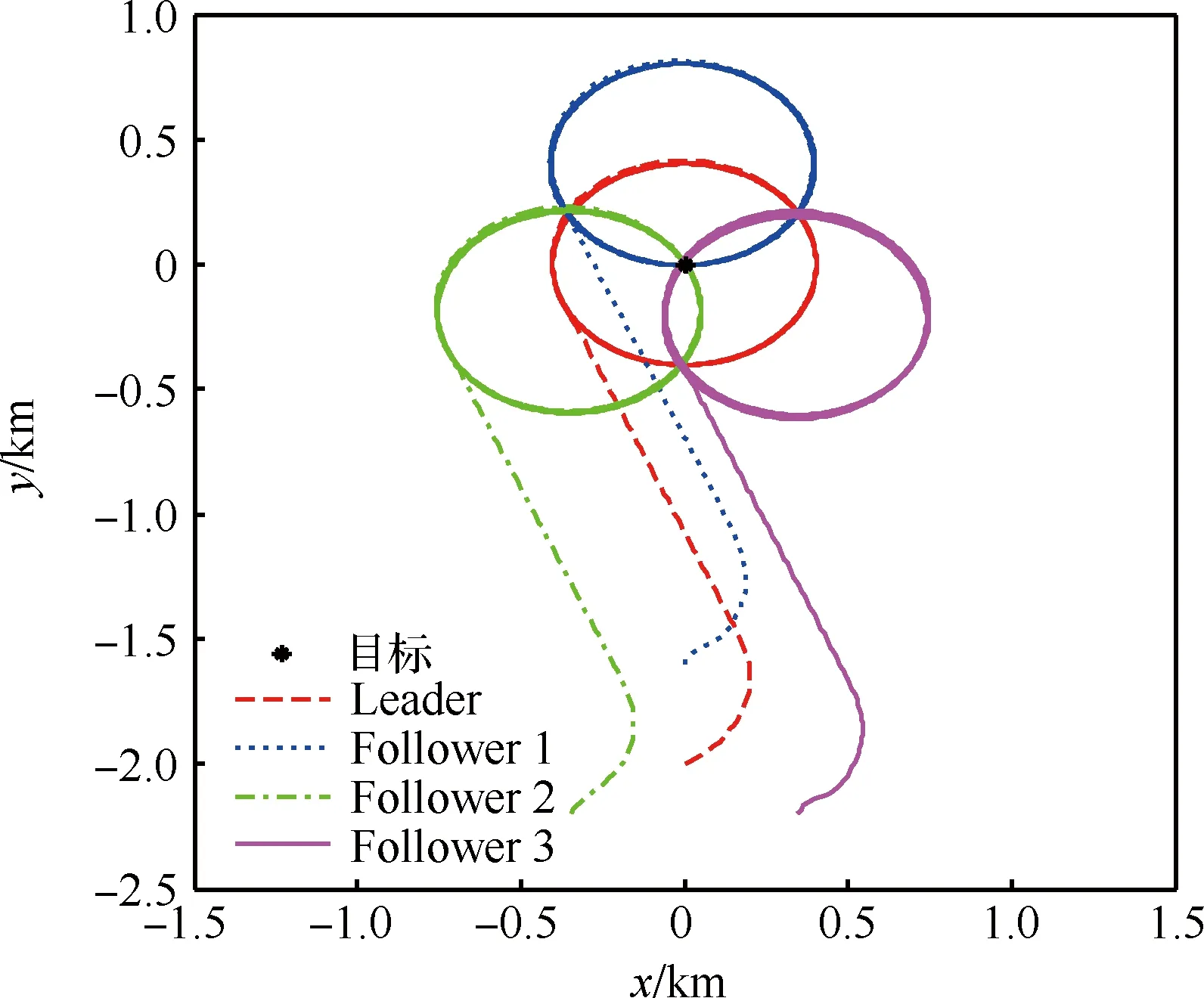
圖3 協(xié)同跟蹤靜止目標(biāo)軌跡Fig.3 Trajectory of cooperative tracking of a static target
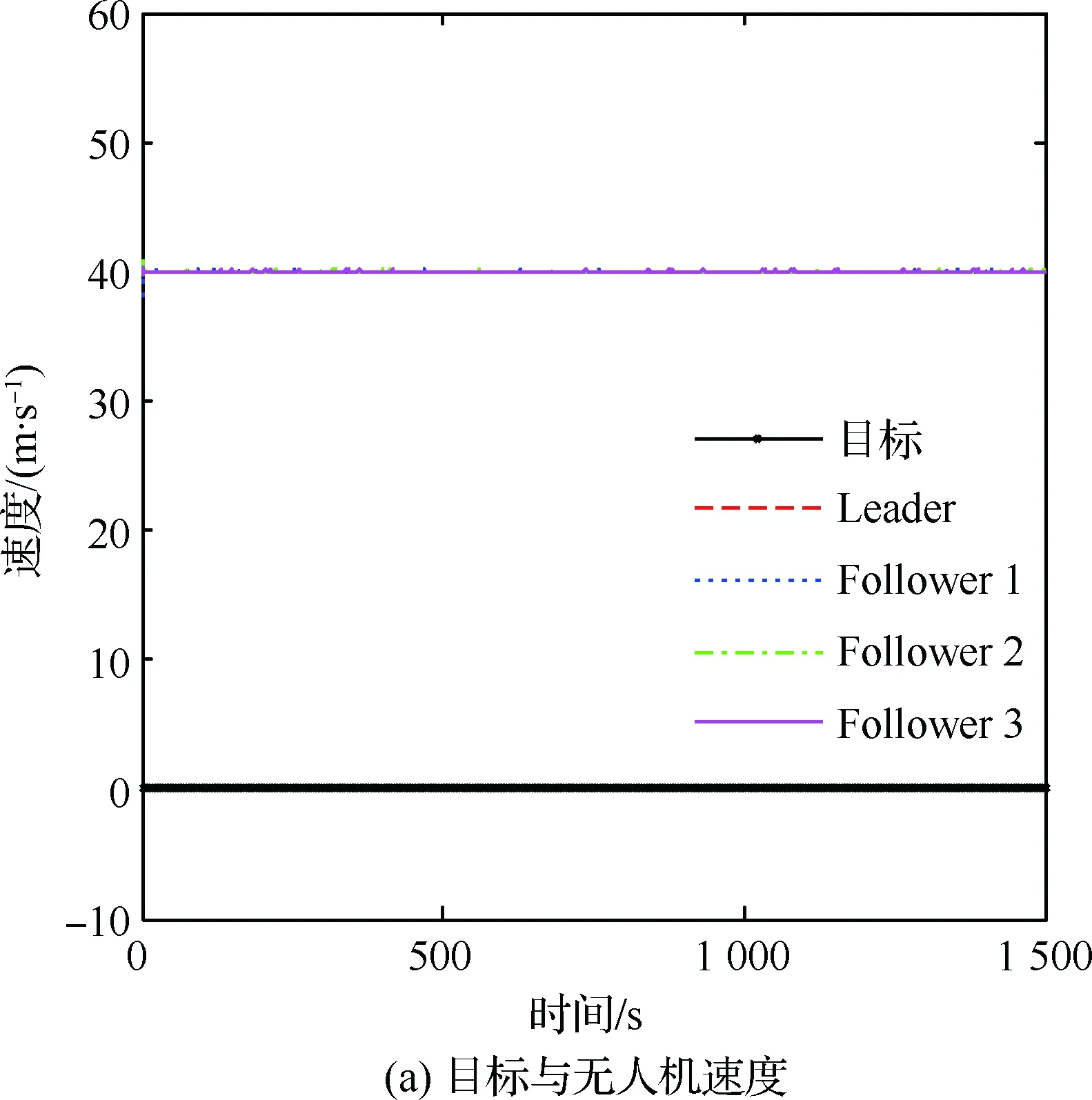
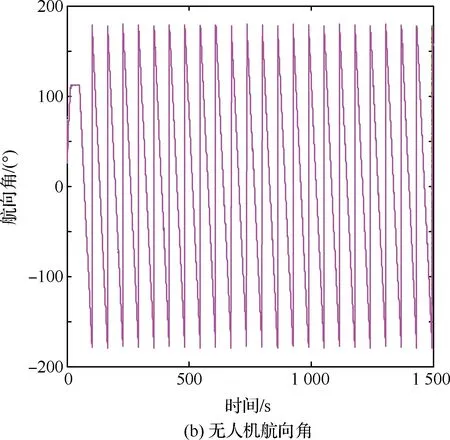
圖4 協(xié)同跟蹤靜止目標(biāo)的速度和航向角Fig.4 Speed and heading angle of cooperative tracking of a static target
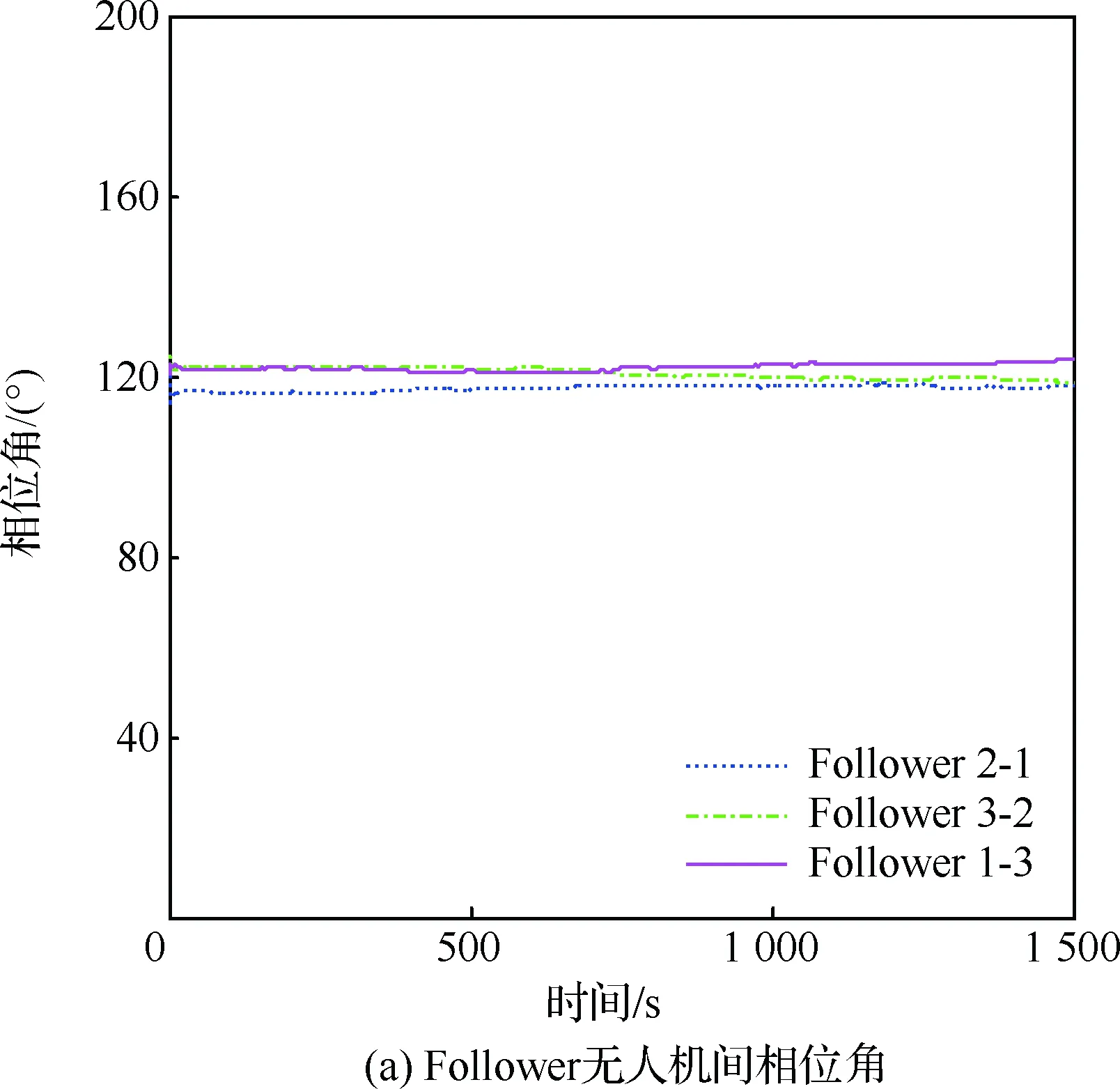
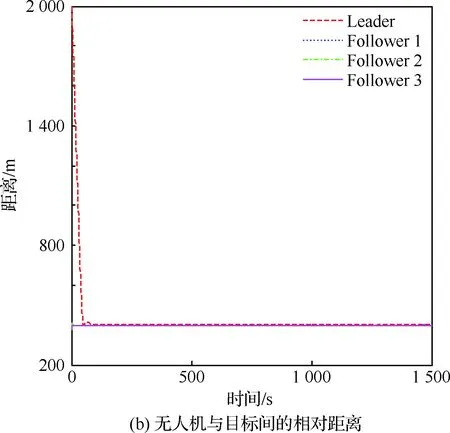
圖5 協(xié)同跟蹤靜止目標(biāo)時(shí)無(wú)人機(jī)相位角與相對(duì)距離Fig.5 Inter-UAV angle and relative range of cooperative tracking of a static target
4.2 勻速運(yùn)動(dòng)目標(biāo)
設(shè)定以40 m/s速度巡航的無(wú)人機(jī)編隊(duì)協(xié)同跟蹤以36 m/s速度移動(dòng)的地面目標(biāo),跟蹤軌跡、速度、航向角、相位角與相對(duì)距離分別如圖6~圖8所示。
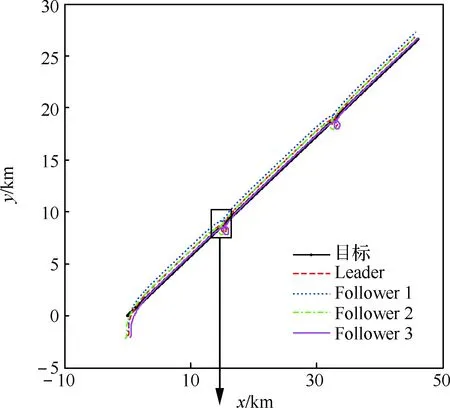
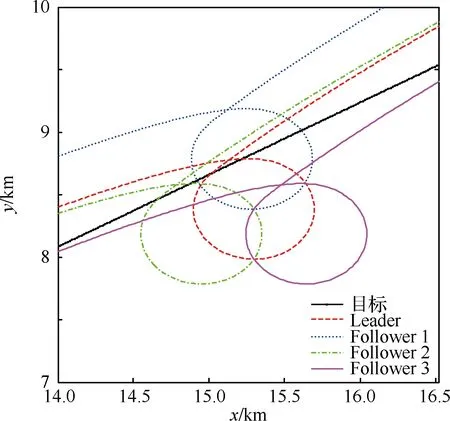
圖6 協(xié)同跟蹤勻速運(yùn)動(dòng)目標(biāo)軌跡Fig.6 Trajectory of cooperative tracking of a constant speed target
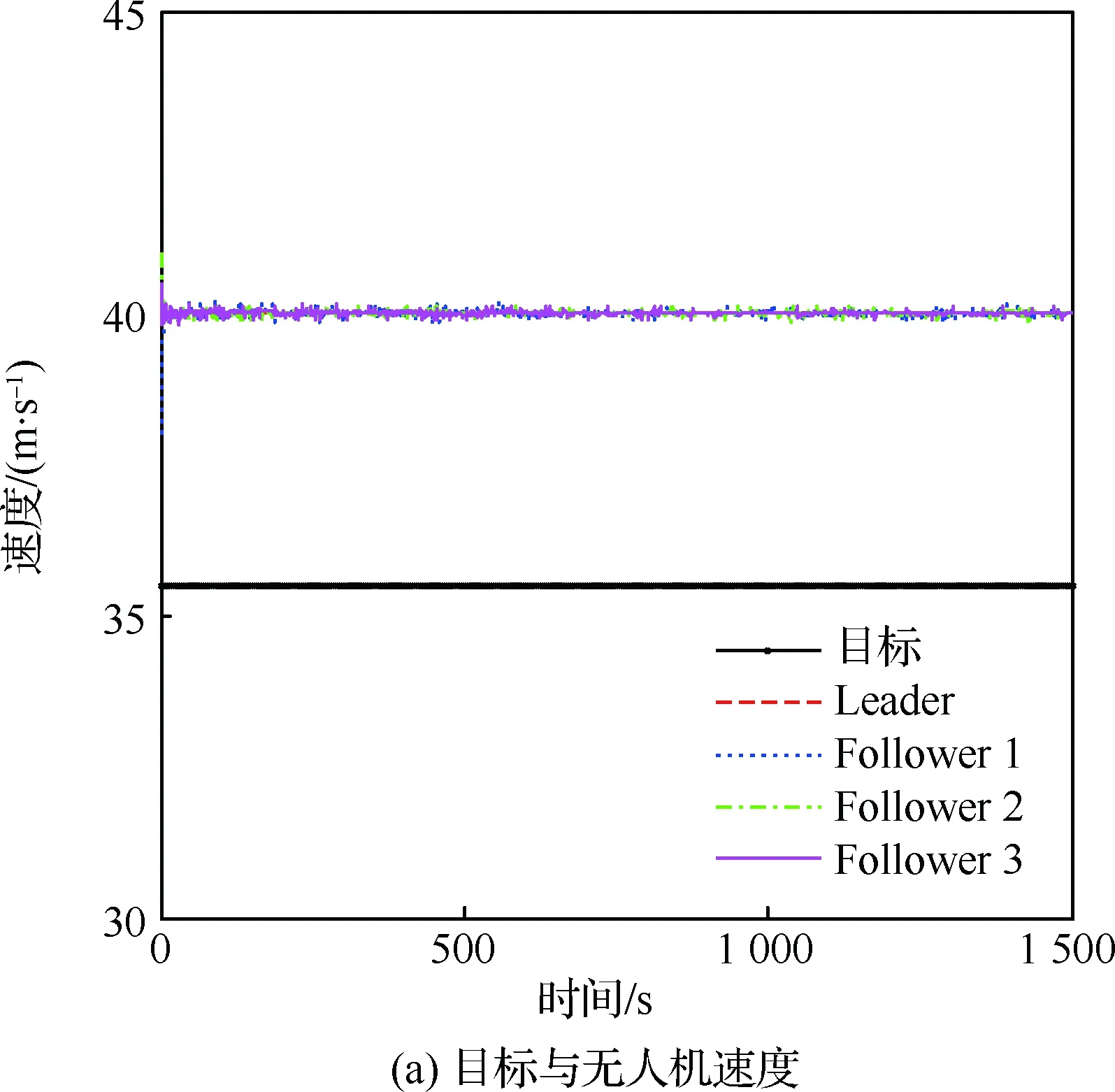

圖7 協(xié)同跟蹤勻速目標(biāo)時(shí)無(wú)人機(jī)速度與航向角Fig.7 Speed and heading angle of cooperative tracking a constant speed target

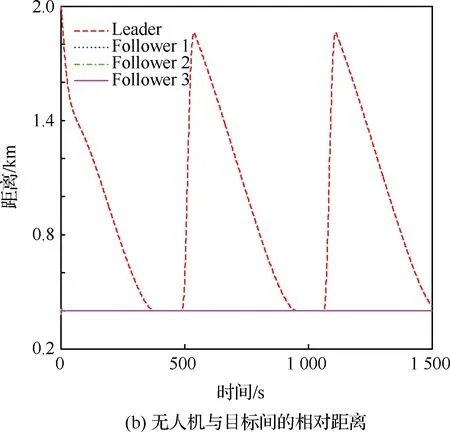
圖8 協(xié)同跟蹤勻速目標(biāo)時(shí)無(wú)人機(jī)間相位角與相對(duì)距離Fig.8 Inter-UAV angle and relative range of cooperative tracking a constant speed target
4.3 變速運(yùn)動(dòng)目標(biāo)
設(shè)定地面目標(biāo)的速度剖面如圖9所示,無(wú)人機(jī)編隊(duì)對(duì)目標(biāo)跟蹤的軌跡、速度、航向角、相位角與相對(duì)距離分別如圖10~圖12所示。
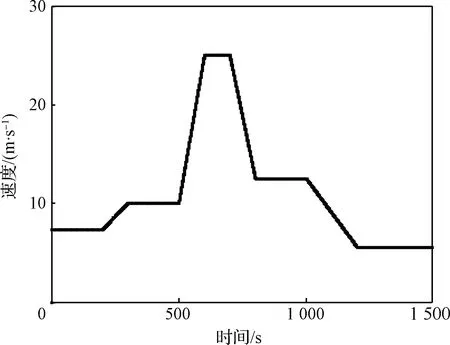
圖9 地面目標(biāo)速度剖面Fig.9 Profile of ground target speed
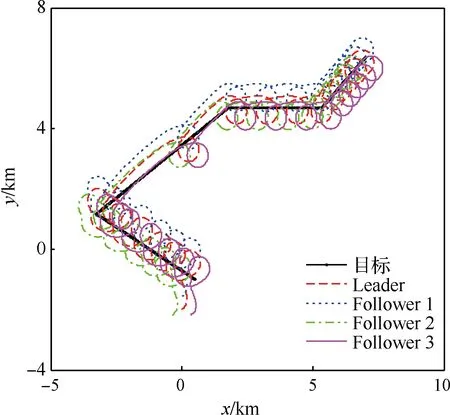
圖10 協(xié)同跟蹤變速目標(biāo)軌跡Fig.10 Trajectory of cooperative tracking of a variable speed target
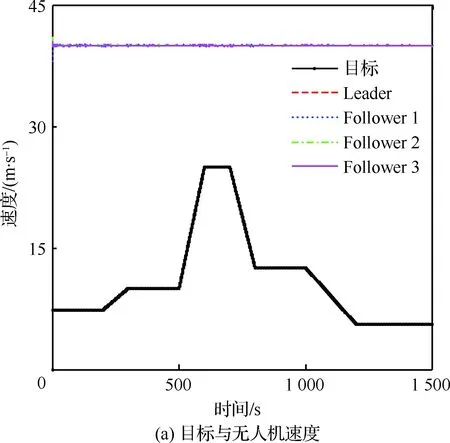
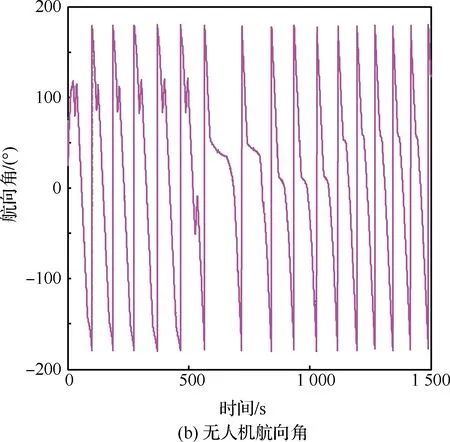
圖11 協(xié)同跟蹤變速目標(biāo)的速度和航向角Fig.11 Speed and heading angle of cooperative tracking of a variable speed target
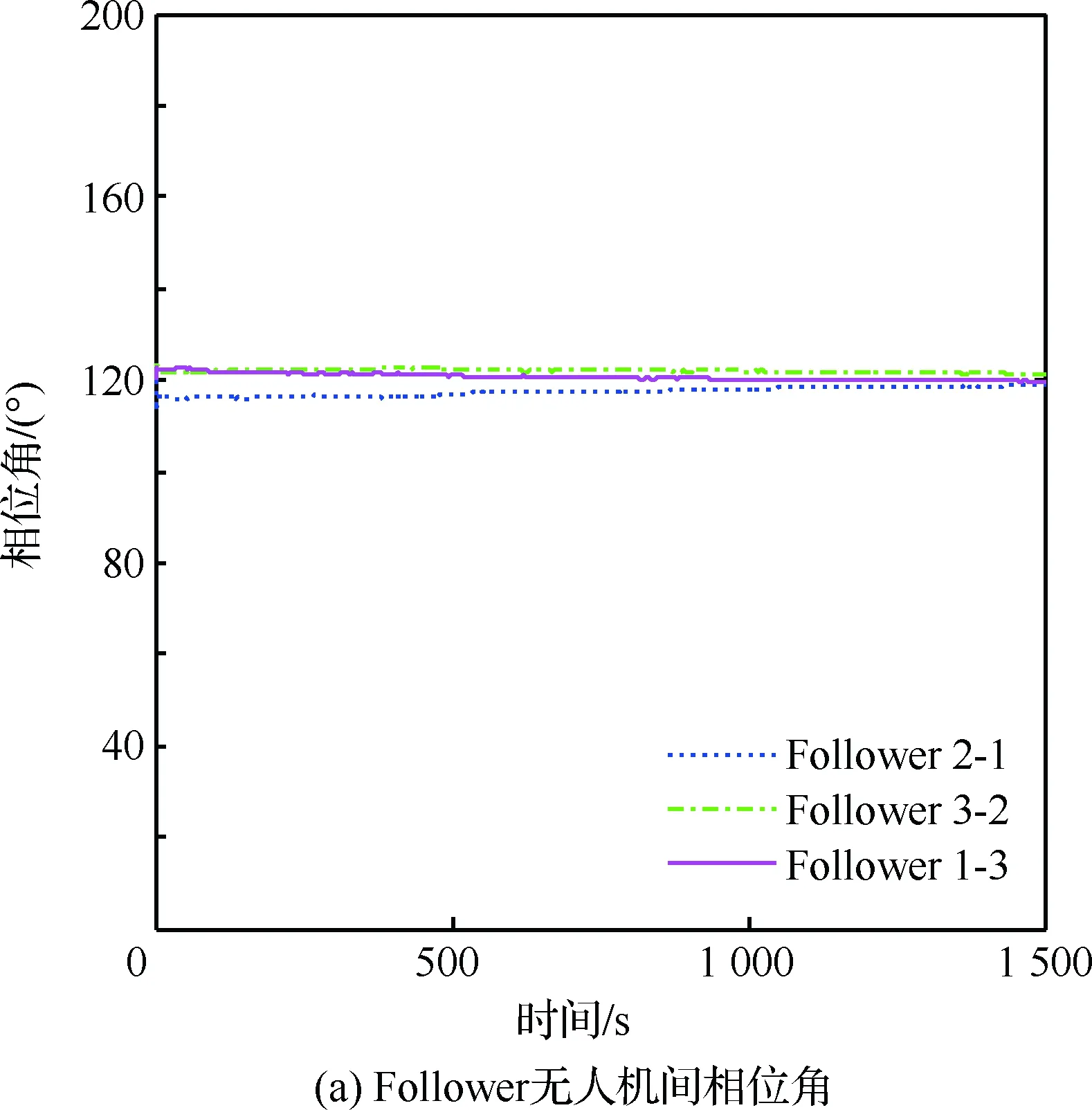

圖12 協(xié)同跟蹤變速目標(biāo)時(shí)無(wú)人機(jī)間相位角及相對(duì)距離Fig.12 Inter-UAV angle and relative range of cooperative tracking of a variable speed target
4.4 仿真性能分析與比較
由4.1~4.3節(jié)中無(wú)人機(jī)編隊(duì)對(duì)不同運(yùn)動(dòng)狀態(tài)地面目標(biāo)的跟蹤結(jié)果可以看出,本文設(shè)計(jì)的無(wú)人機(jī)Leader-Follower編隊(duì)架構(gòu)及跟蹤制導(dǎo)律能夠很好地對(duì)包括高速運(yùn)動(dòng)目標(biāo)在內(nèi)的地面目標(biāo)進(jìn)行自動(dòng)跟蹤,同時(shí)編隊(duì)與地面目標(biāo)的距離以及編隊(duì)內(nèi)無(wú)人機(jī)間相對(duì)位置的控制完全滿足設(shè)計(jì)要求。為了進(jìn)一步分析本文無(wú)人機(jī)Leader-Follower編隊(duì)協(xié)同跟蹤地面目標(biāo)的性能,選取文獻(xiàn)[20]中的經(jīng)典李雅普諾夫向量法(Lyapunov Vector Fields Guidance, LVFG)協(xié)同跟蹤制導(dǎo)方法,在相同條件下對(duì)勻速和變速運(yùn)動(dòng)地面目標(biāo)的跟蹤問(wèn)題進(jìn)行了仿真。
對(duì)變速運(yùn)動(dòng)目標(biāo)的跟蹤以Follower無(wú)人機(jī)中的UAV #1為比較對(duì)象,兩者的速度和相位角對(duì)比結(jié)果如圖14所示。
從圖14可以看出,無(wú)人機(jī)協(xié)同跟蹤地面目標(biāo)時(shí), 本文中的協(xié)同制導(dǎo)律總能使得Follower無(wú)人機(jī)的速度趨向于Leader無(wú)人機(jī),無(wú)人機(jī)的速度與相位角的穩(wěn)定性優(yōu)于LVFG方法。

圖13 采用LVFG方法跟蹤高速目標(biāo)軌跡Fig.13 Trajectory of tracking of a high speed target by LVFG
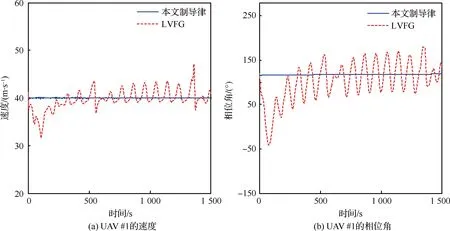
圖14 2種方法得到的UAV #1速度與相位角對(duì)比Fig.14 Comparison of speed and inter-UAV angle between UAV #1 between two methods
5 結(jié) 論
本文提出了一種用于多無(wú)人機(jī)協(xié)同跟蹤地面目標(biāo)的新型制導(dǎo)方法,主要貢獻(xiàn)為:
1) 設(shè)計(jì)了Leader無(wú)人機(jī)Standoff跟蹤地面目標(biāo)的制導(dǎo)律,解決了傳統(tǒng)Standoff跟蹤方法存在的對(duì)地面目標(biāo)運(yùn)動(dòng)速度的限制問(wèn)題。
2) 設(shè)計(jì)了Follower無(wú)人機(jī)Standoff跟蹤Leader無(wú)人機(jī)的制導(dǎo)律,并使得Follower無(wú)人機(jī)的速度與航向角逐漸與Leader無(wú)人機(jī)的速度與航向角一致。
3) 采用李雅普諾夫直接法對(duì)所提出制導(dǎo)律的穩(wěn)定性進(jìn)行了嚴(yán)格數(shù)學(xué)證明。
4) 仿真表明本文提出的新型編隊(duì)跟蹤策略可以很好地跟蹤不同運(yùn)動(dòng)狀態(tài)的地面目標(biāo),具有工程應(yīng)用價(jià)值。
[1] 陳宗基, 魏金鐘, 王英勛, 等. 無(wú)人機(jī)自主控制等級(jí)及其系統(tǒng)結(jié)構(gòu)研究[J]. 航空學(xué)報(bào), 2011, 32(6): 1075-1083.
CHEN Z J, WEI J Z, WANG Y X, et al. UAV autonomous control levels and system structure[J]. Acta Aeronautica et Astronautica Sinica, 2011, 32(6): 1075-1083 (in Chinese).
[2] 王道波, 王寅, 蔣琬玥, 等. 基于化學(xué)反應(yīng)優(yōu)化的多無(wú)人機(jī)地面移動(dòng)目標(biāo)協(xié)同觀測(cè)航跡規(guī)劃[J]. 中國(guó)科學(xué)(技術(shù)科學(xué)), 2015, 45(6): 583-594.
WANG D B, WANG Y, JIANG W Y, et al. Unmanned aerial vehicles cooperative path planning for ground target tracking via chemical reaction optimization[J]. Scientia Sinica (Technologica), 2015, 45(6): 683-594 (in Chinese).
[3] RATHINAM S, ZU W K, SENGUPTA R. Vision-based monitoring of locally linear structures using an un-manned aerial vehicle[J]. Journal of Infrastructure Systems, 2008, 14(1): 52-63.
[4] LIU W, ZHENG Z, CAI K Y. Adaptive path planning for unmanned aerial vehicles based on bi-level programming and variable planning time interval[J]. Chinese Journal of Aeronautics, 2013, 26(3): 646-660.
[5] BERTUCCELLI L F, HOW J P. Search for dynamic targets with uncertain probability maps[C]∥American Control Conference. Piscataway, NJ: IEEE Press, 2006: 14-16.
[6] LI Z Y, HOVAKIMYAN N, DOBROKHODOV V, et al. Vision-based target tracking and motion estimation using a small UAV[C]∥49th IEEE Conference on Decision and Control. Piscataway, NJ: IEEE Press, 2011: 2505-2510.
[7] 齊雪, 張利軍, 趙杰梅. Serret-Frenet坐標(biāo)系下AUV自適應(yīng)路徑跟蹤控制[J]. 系統(tǒng)科學(xué)與數(shù)學(xué), 2016, 36(11): 1851-1864.
QI X, ZHANG L J, ZHAO J M. Advanced path tracking control of AUV in Serret-Frenet coordinate system[J]. Journal of Systems Science and Mathematical Sciences, 2016, 36 (11): 1851-1864 (in Chinese).
[8] SHAMES I, DASGUPTA S, FIDAN B, et al. Circumnavigation using distance measurements under slow drift[J]. IEEE Transactions on Automatic Control, 2012, 57(4): 889-903.
[9] YAMASAKI T, BALAKRISHNAN S N. Sliding mode based pure pursuit guidance for UAV rendezvous and chase with a cooperative aircraft[C]∥American Control Conference. Piscataway, NJ: IEEE Press, 2010: 5544-5549.
[10] MATVEEV A S, TEIMOORI, H, SAVKIN A V. The problem of target following based on range-only measurements for car-like robots[C]∥IEEE conference on decision and control and Chinese control conference. Piscataway, NJ: IEEE Press, 2009: 8537-8542.
[11] MATVEEV A S, TEIMOORI, H, SAVKIN A V. Range-only measurements based target following for wheeled mobile robots[J]. Automatica, 2011, 47(1): 177-184.
[12] SUMMERS T, AKELLA M, MEARS M. Coordinated standoff tracking of moving targets: Control laws and information architectures[J]. Journal of Guidance, Control, & Dynamics, 2013, 32(1): 56-69.
[13] VARGA M, ZUFFEREY J C, HEITZ G, et al. Evaluation of control strategies for fixed-wing drones following slow-moving ground agents[J]. Robotics and Autonomous Systems, 2015, 72(1): 285-294.
[14] CHEN B H, JIAO Z X, SHUZHI S G. Aircraft-on-ground path following control by dynamical adaptive backstepping[J]. Chinese Journal of Aeronautics, 2013, 26(3): 668-675.
[15] 吳森堂, 費(fèi)玉華. 飛行控制系統(tǒng)[M]. 北京: 北京航空航天大學(xué)出版社, 2005: 46-64.
WU S T, FEI Y H. Flight control system[M]. Beijing: Beihang University Press, 2005: 46-64 (in Chinese).
[16] LI Z, HOVAKIMYAN N, DOBROKHODOV V, et al. Vision-based tracking and motion estimation for moving targets using small UAVs[C]∥American Control Conference. Piscataway, NJ: IEEE Press, 2006: 1428-1433.
[17] ZHAO Q L, DONG X W, LIANG Z, et al. Distributed cooperative guidance for multiple missiles with fixed and switching communication topologies[J]. Chinese Journal of Aeronautics, 2017, 30(4): 1570-1581.
[18] KHALIL H K. Nonlinear systems[M]. 3rd ed. Upper Saddle River, NJ: Prentice Hall, 2002: 111-174.
[19] ZHANG M, LIU H. Cooperative tracking a moving target using multiple fixed-wing UAVs[J]. Journal of Intelligent and Robotic Systems, 2016, 81(3): 505-529.
[20] FREW E W, LAWRENCE D A, STEVE M. Coordinated standoff tracking of moving targets using Lyapunov guidance vector fields[J]. Journal of Guidance, Control, & Dynamics, 2008, 31(2): 290-306.