鋼筋籠分料盤(pán)鏈輪軸瞬態(tài)動(dòng)力學(xué)分析
2018-03-07 10:20:38王德民劉榮帥吳紅剛王鵬宇
機(jī)械 2018年2期
王德民,劉榮帥,吳紅剛,王鵬宇
?
鋼筋籠分料盤(pán)鏈輪軸瞬態(tài)動(dòng)力學(xué)分析
王德民,劉榮帥,吳紅剛,王鵬宇
(長(zhǎng)春理工大學(xué) 機(jī)電工程學(xué)院,吉林 長(zhǎng)春 130022)
鋼筋籠分料盤(pán)自身慣量大、啟動(dòng)時(shí)間短,減速機(jī)末端的鏈輪軸受力復(fù)雜,在啟動(dòng)時(shí)會(huì)承受強(qiáng)大的沖擊載荷。利用CATIA軟件建立鏈輪軸的三維模型,并測(cè)量分料盤(pán)的轉(zhuǎn)動(dòng)慣量,將計(jì)算的動(dòng)力矩作為瞬態(tài)動(dòng)力學(xué)分析的載荷條件,聯(lián)合ANSYS WorkBench對(duì)分料盤(pán)鏈輪軸在啟動(dòng)階段承受載荷情況有限元分析,得到應(yīng)力-應(yīng)變曲線。結(jié)果表明鏈輪軸的強(qiáng)度符合設(shè)計(jì)要求。
鏈輪軸;沖擊載荷;ANSYS WorkBench;瞬態(tài)動(dòng)力學(xué)
鋼筋籠具有固聚流質(zhì)、提高強(qiáng)度的作用,廣泛應(yīng)用于橋梁、高鐵及大型建筑物的建造[1]。鋼筋籠在焊接過(guò)程中,分料盤(pán)起到輔助成型、輔助支撐的作用。一套鋼筋籠成型機(jī)需要1臺(tái)主動(dòng)分料盤(pán)以及數(shù)臺(tái)隨動(dòng)分料盤(pán)設(shè)備,主動(dòng)分料盤(pán)通過(guò)傳動(dòng)軸帶動(dòng)所有分料盤(pán)旋轉(zhuǎn)運(yùn)動(dòng),圖1為鋼筋籠成型機(jī)布局圖。考慮到分料盤(pán)自身慣量、鋼筋重量以及摩擦阻力因素,需要強(qiáng)大的驅(qū)動(dòng)力矩才能使分料盤(pán)啟動(dòng)。當(dāng)焊接工序啟動(dòng)時(shí),會(huì)對(duì)減速機(jī)末端的鏈輪軸施加瞬間的驅(qū)動(dòng)轉(zhuǎn)矩,使其足以帶動(dòng)所有分料盤(pán)的旋轉(zhuǎn)[2]。鏈輪軸在啟動(dòng)瞬間,要求分料盤(pán)在短時(shí)間內(nèi)達(dá)到規(guī)定的轉(zhuǎn)速,在強(qiáng)大的啟動(dòng)力矩作用下,會(huì)對(duì)鏈輪軸產(chǎn)生巨大的瞬間載荷,若鏈輪軸的強(qiáng)度不足,必然對(duì)鋼筋籠的焊接質(zhì)量產(chǎn)生影響,并且造成系統(tǒng)元器件的損壞[3]。利用三維軟件CATIA以及有限元仿真軟件WorkBench對(duì)鏈輪軸進(jìn)行瞬間載荷作用下的瞬態(tài)動(dòng)力學(xué)分析,保證齒輪軸的強(qiáng)度符合要求,并對(duì)后期鏈輪軸的疲勞壽命分析提供理論參考。
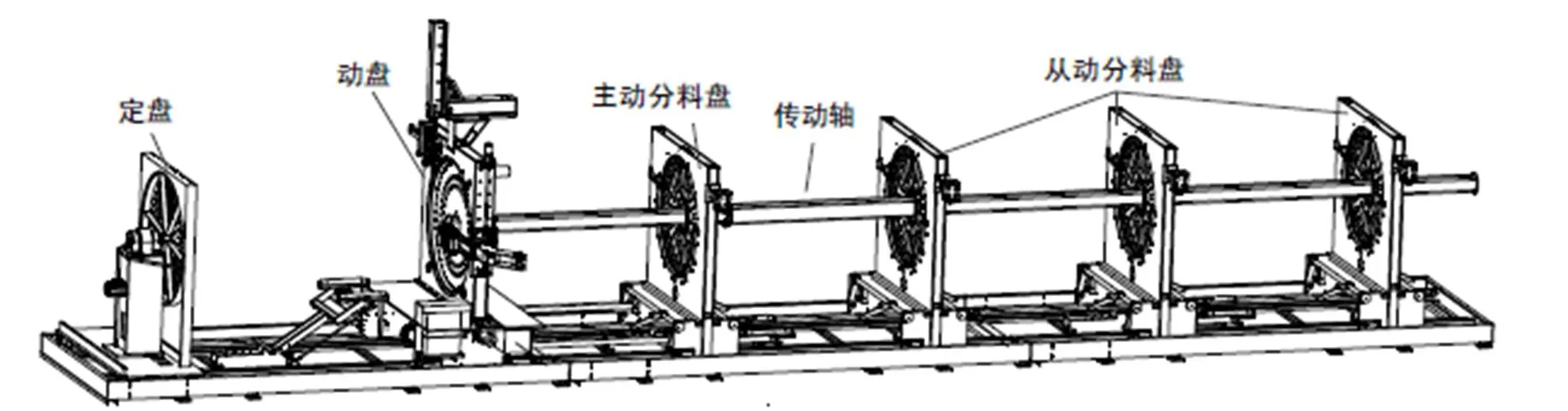
圖1 鋼筋籠成型機(jī)布局圖
減速機(jī)末端的鏈輪軸通過(guò)鍵條連接鏈輪,鏈輪的齒圈與鏈輪轂螺栓連接,通過(guò)鏈輪齒圈與鏈條嚙合來(lái)傳遞轉(zhuǎn)矩,鏈輪布置三個(gè);鏈條位于鉛錘面內(nèi),中心線水平,與分料盤(pán)輪盤(pán)周邊輪齒嚙合傳動(dòng)轉(zhuǎn)矩[4],傳動(dòng)示意如圖2所示。
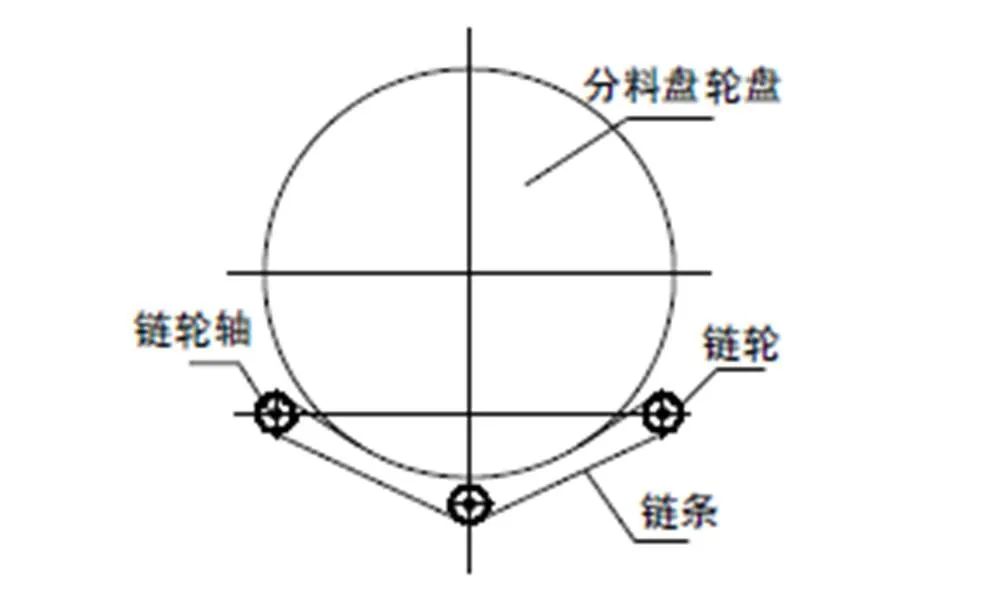
圖2 分料盤(pán)鏈傳動(dòng)示意圖
1 分料盤(pán)啟動(dòng)力矩計(jì)算
分料盤(pán)輪盤(pán)形狀呈圓形,但質(zhì)量分布不均,利用傳統(tǒng)數(shù)學(xué)公式計(jì)算繁瑣、效率低。本文采用CATIA軟件自動(dòng)計(jì)算輪盤(pán)的相關(guān)參數(shù)。首先建立三維模型,加載材料的屬性,然后就可測(cè)得輪盤(pán)的質(zhì)量及轉(zhuǎn)動(dòng)慣量等參數(shù)。將其作為已知數(shù)據(jù)即可求相關(guān)力矩。
分料盤(pán)啟動(dòng)時(shí)外界對(duì)輪盤(pán)產(chǎn)生的阻力矩大,因此在啟動(dòng)時(shí)要考慮系統(tǒng)的轉(zhuǎn)動(dòng)慣量和摩擦力矩,包括轉(zhuǎn)動(dòng)慣量產(chǎn)生的力矩以及轉(zhuǎn)動(dòng)時(shí)的摩擦力矩[5]。
式中:為啟動(dòng)力矩;M為滾動(dòng)摩擦力矩;M為轉(zhuǎn)盤(pán)以及鋼筋轉(zhuǎn)動(dòng)慣量產(chǎn)生的力矩。
(1)轉(zhuǎn)動(dòng)慣量包括分料盤(pán)輪盤(pán)以及輪盤(pán)上的鋼筋,輪盤(pán)的轉(zhuǎn)動(dòng)慣量直接由CATIA測(cè)得為433.65 kg·m2,鋼筋的轉(zhuǎn)動(dòng)慣量計(jì)算得37.1 kg·m2,因此轉(zhuǎn)動(dòng)慣量產(chǎn)生的力矩為:
式中:為輪盤(pán)與鋼筋的轉(zhuǎn)動(dòng)慣量之和;為角加速度,其值為0.5 m/s2。
代入?yún)?shù)得:M=235.375 N·m
(2)摩擦力矩為:
式中:1為分料盤(pán)輪盤(pán)重量,測(cè)得值6838.6 N;2為輪盤(pán)上鋼筋重量,1644 N;為滾動(dòng)動(dòng)摩擦系數(shù),取0.1;為摩擦力作用點(diǎn)距軸心的力臂長(zhǎng)。
代入?yún)?shù)得:M=848.26 N·m
通過(guò)CATIA輔助計(jì)算,得到一個(gè)分料盤(pán)的啟動(dòng)力矩為1083.635 N·m,由于主動(dòng)分料盤(pán)帶動(dòng)三個(gè)從動(dòng)分料盤(pán)旋轉(zhuǎn),故總力矩4334.54 N·m。
2 瞬態(tài)動(dòng)力學(xué)分析
2.1 瞬態(tài)動(dòng)力學(xué)方程
瞬態(tài)動(dòng)力學(xué)分析(也稱(chēng)時(shí)間-歷程分析)用于確定結(jié)構(gòu)承受隨時(shí)間變化載荷時(shí)的動(dòng)力學(xué)響應(yīng),使用這種分析方法可得出變載荷作用下結(jié)構(gòu)內(nèi)部隨時(shí)間變化的位移云圖和應(yīng)力云圖。瞬態(tài)分析不同于靜態(tài)分析,瞬態(tài)動(dòng)力分析主要考慮隨時(shí)間變化載荷及阻尼和慣性的影響[6]。瞬態(tài)動(dòng)力學(xué)分析中求解的運(yùn)動(dòng)方程如下:

式中:[]為質(zhì)量矩陣;[]為阻尼矩陣;[]為剛度矩陣;{}為位移矢量;{()}為力矢量;{}為速度矢量;{}為加速度矢量。
2.2 模型的建立及材料屬性設(shè)置
利用CATIA建立鏈輪軸的三維模型,將其保存為IGS格式導(dǎo)入WorkBench 16.0中,如圖3所示。鏈輪軸所用材料為40Cr,楊氏模量206 GPa,泊松比0.3,密度7820 kg/m3,強(qiáng)度極限980 MPa,屈服極限785 MPa。
圖3 鏈輪軸三維模型
2.3 瞬態(tài)動(dòng)力學(xué)設(shè)置
網(wǎng)格劃分的質(zhì)量對(duì)有限元分析結(jié)果有較大影響,由于軸的鍵槽結(jié)構(gòu),自動(dòng)劃分的方法會(huì)在邊界產(chǎn)生較多的節(jié)點(diǎn),難以保證計(jì)算精度,故采取以六面體為主的劃分方法。得到節(jié)點(diǎn)數(shù)126572個(gè),單元數(shù)35968個(gè),如圖4所示。

圖4 鏈輪軸網(wǎng)格劃分
網(wǎng)格劃分完成后,對(duì)鏈輪軸添加約束與載荷。系統(tǒng)啟動(dòng)時(shí),裝有鏈輪的一端是固定的,故加載fix support固定約束;鏈輪軸另一端受到瞬間力矩,故在另一端的鍵槽處加載moment力矩載荷[7]。主動(dòng)分料盤(pán)與3個(gè)從動(dòng)分料盤(pán)在加速啟動(dòng)階段的總力矩為4334.54 N·m,由鏈輪與分料盤(pán)輪盤(pán)的齒數(shù)比17/192可知,加載到鍵槽處的轉(zhuǎn)矩為383.8 N·m。
齒輪軸瞬態(tài)動(dòng)力學(xué)分析的關(guān)鍵是初始時(shí)間步長(zhǎng)及加載約束的設(shè)置。其中時(shí)間步長(zhǎng)反映了每次求解的疊加時(shí)間,決定了求解精度。最小時(shí)間步長(zhǎng)設(shè)置為0.01 s,設(shè)置鋼筋籠分料盤(pán)加速啟動(dòng)的時(shí)間為2 s,5 s之后達(dá)到鋼筋籠正常工作狀態(tài)(勻速轉(zhuǎn)動(dòng))。
2.4 瞬態(tài)動(dòng)力學(xué)結(jié)果后處理
經(jīng)仿真分析,鏈輪軸在啟動(dòng)階段受到的最大等效應(yīng)力為490.8 MPa,最大變形量為0.13 mm。應(yīng)力值并沒(méi)有達(dá)到軸的屈服應(yīng)力,表明鏈輪軸強(qiáng)度滿足要求,應(yīng)力圖中顯示軸肩以及鍵槽處應(yīng)力較大,在鍵槽圓角半徑處應(yīng)力最大。說(shuō)明過(guò)渡圓角處在交變載荷作用下易產(chǎn)生應(yīng)力集中,應(yīng)對(duì)此位置進(jìn)行強(qiáng)化處理。由圖5和圖6中可以看出,在啟動(dòng)瞬間鏈輪軸要承受分料盤(pán)轉(zhuǎn)動(dòng)慣量以及轉(zhuǎn)動(dòng)摩擦產(chǎn)生的全部力矩,應(yīng)力值瞬間達(dá)到666.7 MPa。并且由于瞬間載荷,在0.1 s時(shí)刻鏈輪軸瞬間承受轉(zhuǎn)矩增加了66 MPa,隨后趨于穩(wěn)定。
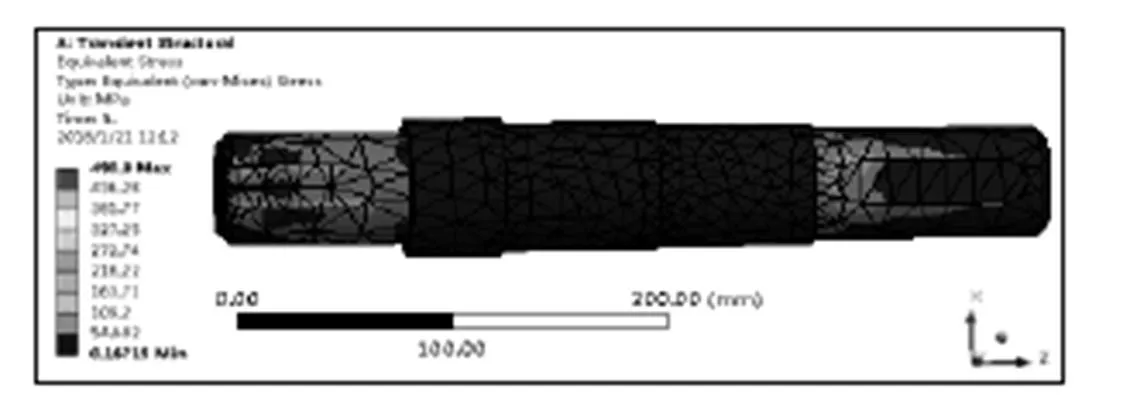
圖5 等效應(yīng)力云圖
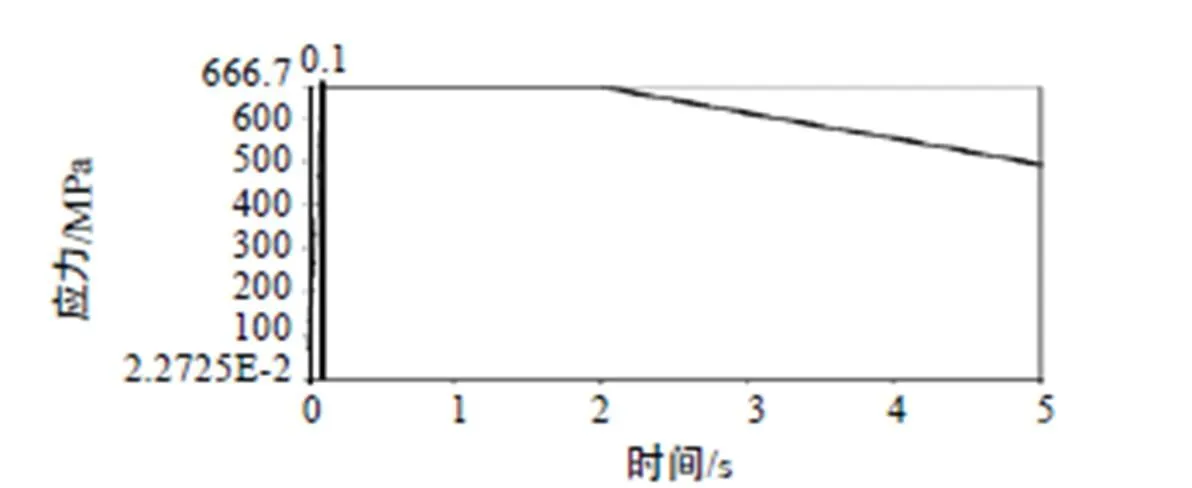
圖6 應(yīng)力曲線圖
3 結(jié)論
(1)基于CATIA軟件對(duì)分料盤(pán)鏈輪軸進(jìn)行了三維建模,并借助內(nèi)設(shè)工具測(cè)得分料盤(pán)的轉(zhuǎn)動(dòng)慣量等參數(shù),進(jìn)而計(jì)算鏈輪軸受到的驅(qū)動(dòng)力矩,并利用WorkBench 16.0進(jìn)行瞬態(tài)動(dòng)力學(xué)分析。結(jié)果表明,鏈輪軸滿足強(qiáng)度要求。
(2)鏈輪軸在啟動(dòng)瞬間,要求分料盤(pán)在短時(shí)間內(nèi)達(dá)到規(guī)定轉(zhuǎn)速,在自身轉(zhuǎn)動(dòng)慣量以及摩擦力矩影響下,對(duì)鏈輪軸產(chǎn)生巨大的瞬間載荷,嚴(yán)重影響鏈輪軸的強(qiáng)度和壽命。因此,在生產(chǎn)要求允許的情況下適當(dāng)?shù)脑黾訂?dòng)時(shí)間,減小鏈輪軸承受的應(yīng)力,從而更好地保證設(shè)備的使用壽命。
[1]葉楊. 鋼筋籠盤(pán)箍機(jī)在建筑工程中的應(yīng)用[J]. 施工技術(shù),2015(5):44-46.
[2]石立,張國(guó)旺,肖驍,等. 立式螺旋攪拌磨機(jī)的啟動(dòng)力矩研究[J]. 礦山機(jī)械,2013(7):68-71.
[3]藍(lán)才武,唐賢明,刁海林. 軟啟動(dòng)皮帶輪的研究與試驗(yàn)[J]. 廣西大學(xué)學(xué)報(bào)(自然科學(xué)版),2003(S1):67-69.
[4]邱宣懷. 機(jī)械設(shè)計(jì)[M]. 北京:高等教育出版社,1997.
[5]任學(xué)平,孫百袆,楊松濤,等. 基于SolidWorks與workbench的轉(zhuǎn)爐齒輪軸制動(dòng)階段瞬態(tài)動(dòng)力學(xué)分析[J]. 機(jī)械傳動(dòng),2014,11(3):136-139.
[6]任愛(ài)華,龔青山,常治斌,鄭方炎. 弧面分度凸輪機(jī)構(gòu)瞬態(tài)動(dòng)力學(xué)分析[J]. 機(jī)械設(shè)計(jì)與制造,2012(5):205-207.
[7]許進(jìn)峰,等. ANSYS Workbench完全自學(xué)一本通[M]. 北京:電子工業(yè)出版社,2014:140-200.
Transient Dynamics Analysis of Chain Wheel Shaft in Reinforcing Cage Lining Plate
WANG Demin,LIU Rongshuai,WU Honggang,WANG Pengyu
( School of Mechanical and Electrical Engineering, Changchun University of Science and Technology, Changchun 130022, China )
The lining plate of the reinforcing cage is characterized by large inertia and short starting time. The chain wheel shaft at the end of the reducer is complex in force and will bear a strong impact load at the start. This paper established 3D model of chain wheel shaft using CATIA software, measured the moment of inertia of the lining plate and regarded the dynamic torque calculation as the loading condition of transient dynamic analysis, then finite element analysis is carried out to obtain the stress-strain curve of the joint ANSYS WorkBench chain wheel in the starting stage. The results show that the strength of the sprocket shaft meets the design requirements.
chain wheel shaft;impact loading;ANSYS WorkBench;transient dynamics
TH69
A
10.3969/j.issn.1006-0316.2018.02.006
1006-0316 (2018) 02-0023-04
2017-06-16
王德民(1961-),男,遼寧西豐人,本科,副研究員,碩士研究生導(dǎo)師,主要研究方向?yàn)闄C(jī)電系統(tǒng)控制與技術(shù)。