車載激光掃描數(shù)據(jù)分類支持下的路面數(shù)據(jù)提取
2018-03-07 06:41:54吳學(xué)群寧津生
測(cè)繪通報(bào) 2018年2期
關(guān)鍵詞:分類
吳學(xué)群,寧津生,楊 芳
(1. 武漢大學(xué)測(cè)繪學(xué)院,湖北 武漢 430079; 2. 昆明理工大學(xué)國土資源工程學(xué)院,云南 昆明 650093; 3. 昆明市測(cè)繪研究院,云南 昆明 650051)
在信息化時(shí)期,交通管理局、園林局、市政局、廣告管理處等政府部門急需城市最新專題數(shù)據(jù),進(jìn)行城市管理輔助決策。已有的專題數(shù)據(jù)多采用全站儀、GNSS RTK等手段進(jìn)行測(cè)繪,現(xiàn)場(chǎng)進(jìn)行屬性調(diào)查,然后內(nèi)業(yè)成圖入庫。傳統(tǒng)作業(yè)方式外業(yè)勞動(dòng)強(qiáng)度大、效率低,無法滿足城市專題數(shù)據(jù)的快速獲取、更新。全景激光移動(dòng)測(cè)量系統(tǒng)作為一種新的空間數(shù)據(jù)采集手段,在行駛過程中快速采集道路及兩旁的城市地物三維點(diǎn)云、影像信息,滿足沿道路兩旁城市專題數(shù)據(jù)快速獲取的需要。
近年來,國內(nèi)外學(xué)者圍繞三維激光點(diǎn)云數(shù)據(jù)的分類與提取進(jìn)行了廣泛的研究。由于機(jī)載掃描系統(tǒng)主要獲取地物的頂面信息,而車載激光掃描系統(tǒng)主要獲取地物的立面信息,因此,機(jī)載的數(shù)據(jù)分類方法不能直接在車載激光掃描系統(tǒng)中應(yīng)用[1]。針對(duì)車載激光點(diǎn)云數(shù)據(jù)的特點(diǎn),一些學(xué)者提出了相應(yīng)的分類提取方法。在道路點(diǎn)云數(shù)據(jù)提取方面,文獻(xiàn)[1]提出了一種基于投影點(diǎn)密度的分類方法;文獻(xiàn)[2]將點(diǎn)云投影在水平格網(wǎng)中,通過判斷格網(wǎng)內(nèi)點(diǎn)云投影前的高度值判別地面點(diǎn);文獻(xiàn)[3]將點(diǎn)云投影在平面上,采用格網(wǎng)對(duì)平面進(jìn)行分割,根據(jù)區(qū)域內(nèi)點(diǎn)的密度差異,實(shí)現(xiàn)不同地物的判別與信息提取;文獻(xiàn)[4]采用基于法向量的模糊聚類方法對(duì)路面點(diǎn)云進(jìn)行分類提取;文獻(xiàn)[5]對(duì)原始點(diǎn)云進(jìn)行規(guī)則格網(wǎng)投影,根據(jù)格網(wǎng)中點(diǎn)云的分布特征生成點(diǎn)云特征圖像,采用閾值分割、輪廓提取等方法實(shí)現(xiàn)點(diǎn)云的分類提取;文獻(xiàn)[6]根據(jù)點(diǎn)云的平面、高程信息,通過點(diǎn)云與其鄰域比較進(jìn)行道路邊線的提取;文獻(xiàn)[7]對(duì)點(diǎn)云進(jìn)行投影、格網(wǎng)分割,根據(jù)格網(wǎng)內(nèi)點(diǎn)云的特征進(jìn)行地物分類;文獻(xiàn)[8]提取掃描線,采用移動(dòng)窗口法依據(jù)掃描線上點(diǎn)云的高程、坡度差異、密度等特征提取路坎點(diǎn);文獻(xiàn)[9]利用點(diǎn)云的高程、反射強(qiáng)度信息進(jìn)行濾波,結(jié)合標(biāo)線的幾何、語義信息提取道路標(biāo)識(shí)線;文獻(xiàn)[10]運(yùn)用近似平面約束法、有序最小二乘坡度估計(jì)、多尺度窗口迭代獲得路面初始種子點(diǎn),在此基礎(chǔ)上,通過局部鄰域坡度方法提取高速公路路面點(diǎn);文獻(xiàn)[11]通過分析城市環(huán)境中道路與鄰近區(qū)域點(diǎn)云的高程差異,結(jié)合區(qū)域生長等圖像處理算法,提出了一種城市道路提取的方法;文獻(xiàn)[12]依據(jù)掃描斷面上數(shù)據(jù)點(diǎn)的空間分布特征,實(shí)現(xiàn)采集數(shù)據(jù)的分類。
本文通過漸進(jìn)網(wǎng)格劃分組合路面數(shù)據(jù)特征的方法,提取點(diǎn)云數(shù)據(jù)中的路面數(shù)據(jù)。根據(jù)各類地物點(diǎn)云數(shù)據(jù)的高程特征,設(shè)定高程閾值,濾除點(diǎn)云數(shù)據(jù)中建筑物的頂面及上半部分、樹木及電桿的上半部分?jǐn)?shù)據(jù);構(gòu)建格網(wǎng),采用漸進(jìn)格網(wǎng)的分類方法對(duì)剩余數(shù)據(jù)點(diǎn)進(jìn)行分類,完成路面數(shù)據(jù)的提取。
1 數(shù)據(jù)預(yù)處理
1.1 原始數(shù)據(jù)處理
對(duì)車載激光掃描系統(tǒng)采集的原始數(shù)據(jù)進(jìn)行POS解算、融合解算和預(yù)處理。其中,POS解算將基站數(shù)據(jù)和GPS數(shù)據(jù)轉(zhuǎn)換成融合軟件所支持的文件格式,并用對(duì)應(yīng)的軟件對(duì)POS數(shù)據(jù)進(jìn)行解算,最后將其導(dǎo)出。融合解算將原始數(shù)據(jù)進(jìn)行融合處理,生成相應(yīng)格式的點(diǎn)云數(shù)據(jù)文件。預(yù)處理環(huán)節(jié)主要完成點(diǎn)云數(shù)據(jù)的去噪、與全景影像的配準(zhǔn)、格式轉(zhuǎn)換等工作。
1.2 數(shù)據(jù)的分割
車載激光掃描點(diǎn)云數(shù)據(jù)量大,道路存在坡度變化。若直接對(duì)整個(gè)掃描區(qū)域的數(shù)據(jù)進(jìn)行處理,難以綜合考慮坡度變化對(duì)分類效果的影響。因此,在進(jìn)行點(diǎn)云數(shù)據(jù)分類前,利用系統(tǒng)頂部衛(wèi)星定位模塊采集的行車軌跡數(shù)據(jù)按高程變化趨勢(shì)對(duì)點(diǎn)云數(shù)據(jù)進(jìn)行分段,對(duì)每段點(diǎn)云數(shù)據(jù)進(jìn)行路面數(shù)據(jù)提取,將結(jié)果合并獲得整個(gè)測(cè)區(qū)的路面分類提取成果。由于實(shí)際測(cè)區(qū)環(huán)境不同,道路情況越復(fù)雜,分段數(shù)越多。
2 漸近格網(wǎng)劃分與組合路面特征的方法
2.1 依據(jù)路面特征分類
城市道路存在坡度變化,但通過數(shù)據(jù)分段后,每段的道路高程變化較為平緩且連續(xù)。在掃描場(chǎng)景中,路面點(diǎn)云數(shù)據(jù)的高程通常低于道路兩旁的樹木、路燈、建筑物等上半部分點(diǎn)云數(shù)據(jù)的高程,因此,設(shè)定高程閾值可以剔除一部分道路兩旁的非路面點(diǎn)。
由于地形存在高低起伏,道路的路面不會(huì)完全水平,在縱橫方向上都存在一定的坡度,因此在設(shè)定高程閾值時(shí),需要考慮道路坡度的影響。本文使用車頂GPS RTK定位模塊的高程與定位模塊至地面的高度之差作為高程閾值Hi,該閾值隨路面的高程變化而變化,避免因?yàn)榈缆菲露燃案叱套兓e(cuò)誤剔除路面點(diǎn)。高程閾值Hi確定后,與分段區(qū)點(diǎn)云數(shù)據(jù)的高程進(jìn)行比較,若點(diǎn)云數(shù)據(jù)的高程值大于閾值,則判斷為非路面點(diǎn)予以剔除;若低于閾值,則視為待定點(diǎn),進(jìn)行下一步判斷。
2.2 基于漸進(jìn)格網(wǎng)法的路面分類與提取
采用漸進(jìn)格網(wǎng)的分類方法對(duì)以上得到的待定點(diǎn)進(jìn)行路面點(diǎn)的分類與提取[13]:
(1) 格網(wǎng)劃分。在分段區(qū)域的點(diǎn)云數(shù)據(jù)中,選取坐標(biāo)的最大值Xmax、Ymax、Zmax與最小值Xmin、Ymin、Zmin。將區(qū)域內(nèi)的點(diǎn)云數(shù)據(jù)投影到XOY平面上,根據(jù)式(1)進(jìn)行M×N的格網(wǎng)劃分,格網(wǎng)的間距為GSD,格網(wǎng)的間距應(yīng)根據(jù)實(shí)際情況進(jìn)行調(diào)整。
(1)
每個(gè)數(shù)據(jù)點(diǎn)所在的格網(wǎng)號(hào)為(i,j),其中
(2)
(2) 以格網(wǎng)為單元,計(jì)算點(diǎn)云數(shù)據(jù)間的高差。設(shè)定閾值,高差小于該閾值的點(diǎn)視為初始路面點(diǎn)。計(jì)算該格網(wǎng)內(nèi)初始路面點(diǎn)的平均高程Ha,并將這些點(diǎn)與其余的點(diǎn)劃分為待定點(diǎn)。
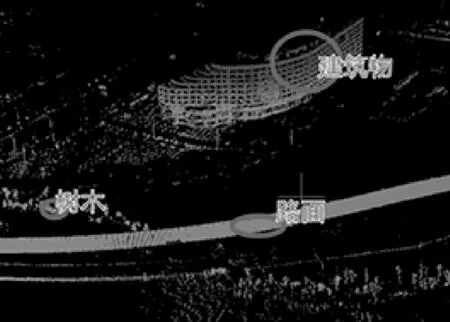
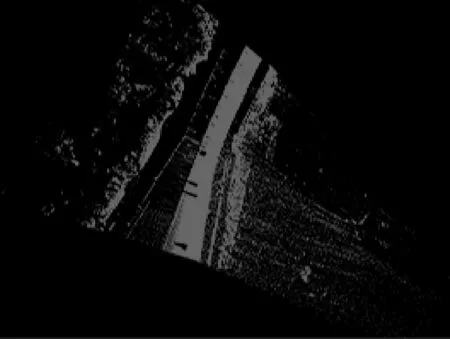
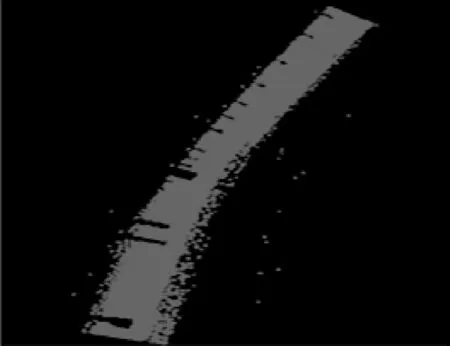
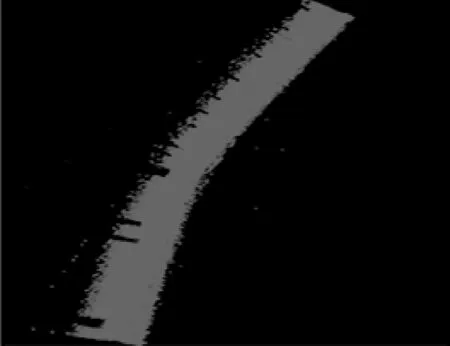
(3) 路面點(diǎn)分類提取。計(jì)算每個(gè)格網(wǎng)中待定點(diǎn)間的最大高差ΔHi,其中ΔHi=Hmax-Hmin,并設(shè)定閾值Hh(將測(cè)區(qū)內(nèi)掃描地物的最小高度作為閾值)。如果格網(wǎng)中計(jì)算的高差ΔHi小于閾值Hh,且格網(wǎng)中最小的高程值與Ha之差小于閾值Ht(Ht根據(jù)系統(tǒng)獲取的坡度和實(shí)際高程確定),即滿足ΔHi 本文采用的路面分類流程如圖1所示,在OpenGL環(huán)境下編程實(shí)現(xiàn)了上述算法。 圖1 試驗(yàn)區(qū)為某市高速路段,測(cè)區(qū)衛(wèi)星圖如圖2所示,數(shù)據(jù)存儲(chǔ)格式為*.las,測(cè)區(qū)采集點(diǎn)云16 831 533個(gè),數(shù)據(jù)類型有路面、樹木、路燈、建筑物等,如圖3所示。 圖2 試驗(yàn)區(qū)衛(wèi)星圖 圖3 試驗(yàn)區(qū)點(diǎn)云 整個(gè)測(cè)區(qū)的點(diǎn)云數(shù)據(jù)被分割為160個(gè)區(qū)域,選取區(qū)域1(如圖4所示)進(jìn)行路面的分類與提取試驗(yàn),點(diǎn)云數(shù)據(jù)效果圖如圖5所示。 圖4 區(qū)域1衛(wèi)星圖 本文所使用的全景激光移動(dòng)測(cè)量系統(tǒng)的掃描中心距離地面約2.5 m,根據(jù)車頂GPS RTK定位模塊的高程值與定位模塊至地面的高度(2.0~2.5 m)設(shè)定高程閾值Hi,剔除高程較高的一部分非地面點(diǎn)。經(jīng)過上述步驟的分類效果如圖6所示。 圖5 區(qū)域1原始點(diǎn)云 圖6 高程閾值分類后的效果 在上述獲取的待定點(diǎn)中利用格網(wǎng)漸進(jìn)劃分的方法提取路面數(shù)據(jù),漸進(jìn)調(diào)整格網(wǎng)間距GSD分別為1.2、1.0、0.8、0.5、0.2 m,分類效果如圖7—圖11所示。 圖7 GSD=1.2 m 圖8 GSD=1.0 m 由以上分類效果圖可以看出,格網(wǎng)間距為1.2、1.0、0.8 m時(shí),建筑物、樹木、路燈等地物點(diǎn)被剔除的同時(shí),許多路面點(diǎn)也被當(dāng)作地物點(diǎn)剔除掉,路面保存不完整;格網(wǎng)間距為0.2 m時(shí),路面點(diǎn)保留較為完好,但是道路兩旁的地物點(diǎn)容易誤分為地面點(diǎn);格網(wǎng)間距為0.5 m時(shí),出現(xiàn)誤分的情況有所減少,同時(shí)能提取出對(duì)向路段的路面點(diǎn),效果較好。 圖9 GSD=0.8 m 圖10 GSD=0.5 m 圖11 GSD=0.2 m 采用上述方法對(duì)整個(gè)試驗(yàn)區(qū)原始點(diǎn)云數(shù)據(jù)(如圖12所示)進(jìn)行分類提取,分類的效果圖如圖13、圖14所示,路面數(shù)據(jù)提取效果較好。 圖12 試驗(yàn)區(qū)原始點(diǎn)云數(shù)據(jù) 圖13 高程閾值分類后點(diǎn)云數(shù)據(jù) 圖14 GSD=0.5 m時(shí)提取時(shí)路面數(shù)據(jù) 與機(jī)載掃描系統(tǒng)不同,車載激光掃描系統(tǒng)主要獲取道路及兩旁地物的立面信息,同時(shí)也會(huì)獲取少量地物(如道路上的車輛、樹冠、低矮建筑物等)的頂面信息,其點(diǎn)云數(shù)據(jù)在平面上的投影區(qū)域較小。本文結(jié)合路面點(diǎn)云數(shù)據(jù)的特征,采用漸進(jìn)格網(wǎng)法進(jìn)行了路面點(diǎn)云數(shù)據(jù)的分類提取研究,在試驗(yàn)區(qū)取得了較好的效果。采用漸進(jìn)格網(wǎng)方法進(jìn)行地面點(diǎn)分類時(shí),格網(wǎng)間距的調(diào)節(jié)極為重要。在具體分類提取過程中,可以在路段中選擇樣本區(qū)域進(jìn)行抽樣試驗(yàn),根據(jù)抽樣路段實(shí)際情況(路面起伏、建筑物、車輛等立面信息)進(jìn)行格網(wǎng)間距設(shè)置的優(yōu)化。 [1] 史文中,李必軍,李清泉.基于投影點(diǎn)密度的車載激光掃描距離圖像分割方法[J].測(cè)繪學(xué)報(bào),2003,34(2):95-100. [2] 吳芬芳,李清泉,熊卿.基于車載激光掃描數(shù)據(jù)的目標(biāo)分類方法[J].測(cè)繪科學(xué),2007,32(4):75-77. [3] 盧秀山,黃磊.基于激光掃描數(shù)據(jù)的建筑物信息網(wǎng)格化提取方法[J].武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2007,32(10):852-855. [4] 閆利,張毅.基于法向量模糊聚類的道路面點(diǎn)云數(shù)據(jù)濾波[J].武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2007,32(12):1119-1122. [5] 楊必勝,魏征,李清泉,等.面向車載激光掃描點(diǎn)云快速分類的點(diǎn)云特征圖像生成方法[J].測(cè)繪學(xué)報(bào),2010,39(5):540-545. [6] 王果,崔希民,袁德寶,等.車載激光點(diǎn)云鄰域比較的道路邊線提取方法[J].測(cè)繪通報(bào),2012(9):55-57. [7] 譚賁,鐘若飛,李芹.車載激光掃描數(shù)據(jù)的地物分類方法[J].遙感學(xué)報(bào),2012,16(1):50-66. [8] 方莉娜,楊必勝.車載激光掃描數(shù)據(jù)的結(jié)構(gòu)化道路自動(dòng)提取方法[J].測(cè)繪學(xué)報(bào),2013,42(2):260-267. [9] 李明輝,田冬雪,胡維強(qiáng).基于車載三維激光掃描的道路線提取[J].測(cè)繪與空間地理信息,2014,37(4):118-121. [10] 劉如飛,田茂義,許君一.車載激光掃描數(shù)據(jù)中高速公路路面點(diǎn)濾波[J].武漢大學(xué)學(xué)報(bào)(信息科學(xué)版),2015,40(6):751-755. [11] 張達(dá),李霖,李游.基于車載激光掃描的城市道路提取方法[J].測(cè)繪通報(bào),2016(7):30-34. [12] MANANDHAR D,SHIBASAKI R.Vehicle-borne Laser Mapping system (VLMS)——A New Observation System for 3D Mapping of Urban Areas [C]∥Proceedings of the IEEE Joint Workshop on Remote Sensing and Data Fusion over Urban Areas.Rome,Italy:IEEE,2001:5-9. [13] 楊芳.基于車載三維激光掃描數(shù)據(jù)分類的路面提取研究[D].昆明:昆明理工大學(xué),2016. [14] 張大坤,羅三明.形態(tài)學(xué)中閉運(yùn)算功能的擴(kuò)展及其應(yīng)用[J].計(jì)算機(jī)工程與應(yīng)用,2010,46(27):185-187. [15] 張小紅.機(jī)載激光雷達(dá)測(cè)量技術(shù)理論與方法[M]:武漢:武漢大學(xué)出版社,2007. [16] 王果.不同平臺(tái)激光點(diǎn)云數(shù)據(jù)面狀信息自動(dòng)提取研究[D].北京:中國礦業(yè)大學(xué),2014.
3 試驗(yàn)分析
3.1 試驗(yàn)區(qū)概況


3.2 試驗(yàn)結(jié)果






4 結(jié) 語
猜你喜歡
西北民族大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年4期)2021-12-29 02:54:24
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
學(xué)生天地(2019年32期)2019-08-25 08:55:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級(jí)語數(shù)英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46
