嵌入式GPS/BDS實時精密單點定位方法
2018-03-07 06:44:59潘樹國
測繪通報 2018年2期
關鍵詞:嵌入式
韓 嘯,潘樹國,趙 慶
(1. 東南大學儀器科學與工程學院,江蘇 南京 210096; 2. 東南大學交通學院,江蘇 南京 210096)
精密單點定位(precise point positioning,PPP)的基本原理是利用全球多個地面跟蹤站計算得到的GNSS精密衛星軌道和精密衛星鐘差,綜合考慮各項誤差的精確模型改正,使用載波相位觀測值實現精確定位。該技術具有定位精度高、采集數據方便、數據處理簡單快捷等優點[1],是實現廣域精密定位的有效手段,具有廣泛的工程應用價值。
目前國際全球定位系統服務組織(Internation-nal GNSS Services,IGS)可基于NTRIP(network tr-ansport of RTCM over the Internet proto-col)協議[2]播發GPS和GLONASS實時衛星軌道和鐘差改正信息,用于實時PPP定位。隨著北斗衛星導航系統初步形成導航定位服務能力[3],武漢大學開發了廣域實時精密定位的數據服務系統[4],用戶可通過TCP協議實時接收GPS和BDS的實時衛星軌道和鐘差改正信息。基于此,本文討論GPS/BDS實時精密單點定位方法,采用無電離層組合觀測模型,實時計算衛星軌道鐘差及各項誤差,使用卡爾曼濾波進行參數估計,然后在嵌入式平臺下實現該算法;通過軟硬件集成研制出一套實時GPS/BDS雙系統高精度定位設備,并且經過測試證明了該設備的可用性。
1 GPS/BDS實時精密單點定位算法
1.1 GPS/BDS實時精密單點定位模型
本文采用雙頻無電離層組合模型作為精密單點定位的觀測模型,可通過線性組合的方式消除電離層一階項的影響,其簡化形式為
(1)

1.2 數據預處理與誤差處理方法
數據質量是GNSS高精度定位的保障,因此需要對數據進行預處理。首先需要剔除不健康衛星和觀測值有粗差的衛星,并且通過MW模型和GF模型進行周跳探測[5],對出現周跳衛星的模糊度初始化。此外,還需剔除低高度角衛星和處于地影區域的衛星,通過這些處理,可以避免異常觀測數據對PPP解算的不利影響。
影響PPP定位精度的因素主要包括衛星軌道鐘差誤差、對流層延遲、衛星與接收機天線相位中心改正、衛星天線相位纏繞、相對論效應、多路徑效應、地球自轉改正,以及地球固體潮和海洋潮。數據預處理和誤差處理的具體策略[6]見表1。
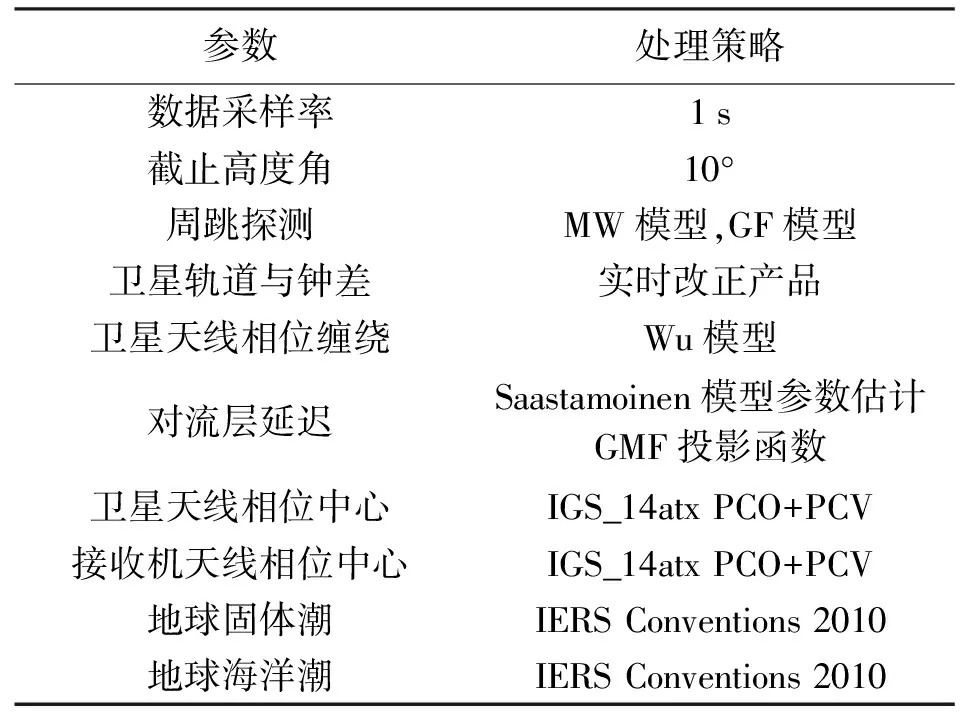
表1 數據預處理和誤差處理策略
1.3 實時精密衛星軌道和鐘差計算
通過廣播星歷和實時軌道鐘差改正產品,可計算實時精密衛星軌道和鐘差,其中實時產品的播發采樣率為1 s。
實時軌道改正數是對廣播星歷計算的衛星軌道星固系下切向、法向、徑向的修正[7],使用時需要將其轉成地固系下的改正值。轉換公式為
(2)
(3)
Xsat=Xbroadcast-dX
(4)
式中,r和v分別為通過廣播星歷計算的位置矢量和速度矢量;eA、ec、eR分別為衛星軌道在切向、法向、徑向的單位向量;dA、dC、dR分別為衛星軌道在切向、法向、徑向的修正值;dX為地固系中衛星位置在X、Y、Z3個方向的修正值。根據廣播星歷計算得到的坐標Xbroadcast和dX可得到實時精密軌道Xsat。
實時精密鐘差是通過實時鐘差改正數對廣播星歷計算的鐘差的修正獲取的[8],公式為
Tsat=Tbroadcast+dt/c
(5)
式中,Tbroadcast為通過廣播星歷計算的鐘差;dt為實時鐘差改正數;c為光速;Tsat為修正后的實時精密鐘差。
選取單天的數據計算實時衛星軌道和鐘差,與最終星歷對比,可得實時衛星軌道和鐘差的精度。對于實時衛星鐘差精度,GPS優于0.5 ns,BDS優于1 ns。實時衛星軌道精度見表2。
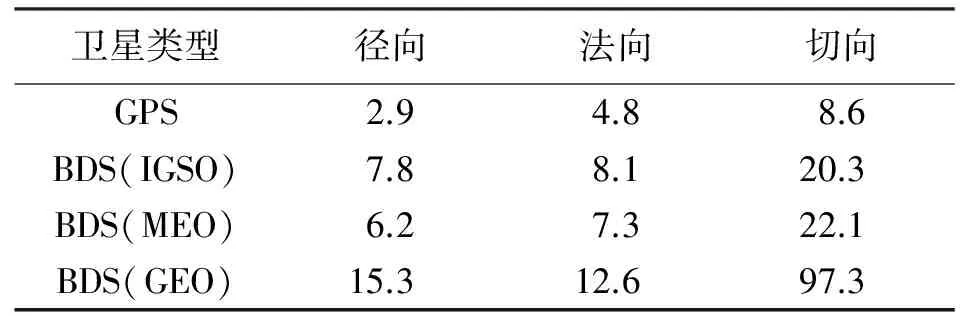
表2 衛星軌道RMS值 cm
由表2可以看出,GPS的衛星軌道精度優于BDS;而BDS的IGSO和MEO衛星明顯優于GEO,尤其是切向。但實際定位中,相對于徑向、切向和法向的偏差對于定位精度影響較小,且切向的偏差在測站和衛星連線方向的投影可被模糊度吸收[9]。因此,定位時仍使用BDS的GEO衛星。
1.4 參數估計方法
假設某一歷元可以觀測到n顆GPS衛星和m顆 BDS衛星,可得到以下待估參數為
(6)
式中,待估參數依次為測站的三維坐標、GPS接收機鐘差、BDS接收機鐘差、天頂對流層濕延遲和GPS與BDS所有衛星的整周模糊度。給定系統狀態初值X0及均方差初值Q0,利用卡爾曼濾波不斷遞推下一個歷元的參數估計。
2 系統設計與實現
2.1 系統平臺設計
整個硬件平臺包括ARM核心板,串口通信模塊、網絡通信模塊、直流電源模塊、衛星OEM板卡和底板。ARM核心板由ARM芯片、SDRAM和Nand Flash組成,其中ARM芯片為ARM9系列的S3C2440A,是整個硬件系統的控制中心。衛星OEM板卡選用和芯星通的UB380,該型號板卡可以捕獲北斗導航系統的B1/B2/B3、GPS的L1/L2的GLONASS L1/L2三系統7個頻點的衛星數據[10],其硬件尺寸兼容市場主流GNSS OEM板卡。直流電源模塊是整個系統的動力來源,可提供3.3 V/1 A和5 V/1 A的直流電源,其中3.3 V/1 A的直流電源將為衛星OEM板卡和通信模塊提供電源電壓,5 V/1 A的直流電源為ARM核心板提供電源電壓。串口通信模塊的驅動電路采用2驅動器/2接收器的SP3232EEN芯片,用于數據通信鏈路的TTL電平與推薦標準RS-232電平之間的轉換[11]。對于S3C2440處理器,共有3個獨立串口通道。其中,串口1用于和外部設備的通信,完成嵌入式Linux操作系統的移植和后期應用程序的調試;串口2用于和衛星OEM板卡進行串口通信,獲取觀測電文和導航電文;串口3用于輸出定位結果。網絡通信模塊用于ARM處理器通過網絡與遠程TCP服務器進行連接,獲取GPS/BDS實時軌道鐘差改正產品。以上各個模塊都組合在硬件平臺底板上,使每個模塊都可以穩定工作。如圖1—圖3所示。
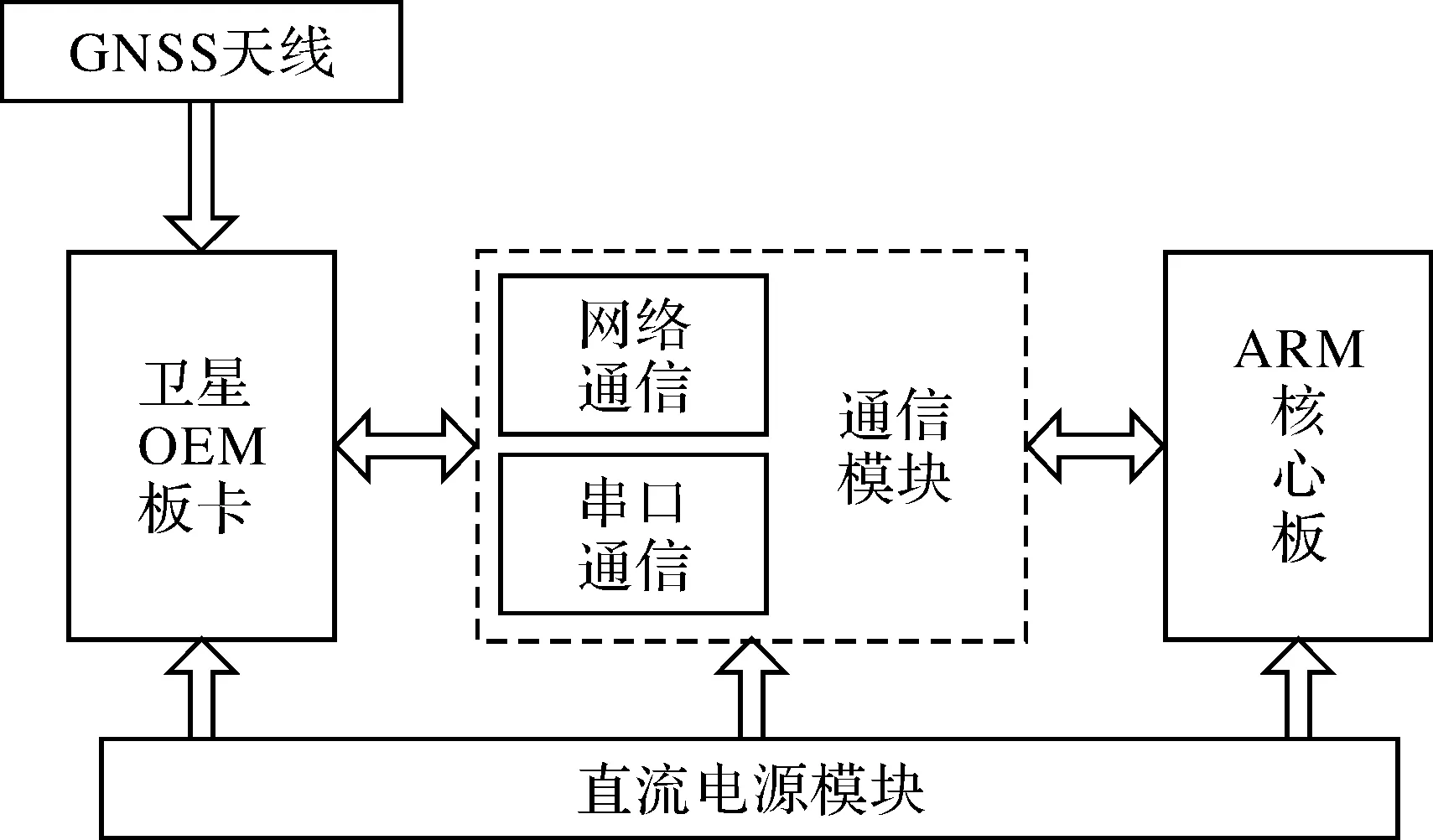
圖1 系統硬件
圖2 系統硬件平臺內部結構圖
系統硬件平臺設計好之后,向硬件平臺移植Linux操作系統。

圖3 嵌入式設備顯示界面
2.2 嵌入式實時PPP軟件設計
在系統平臺的基礎上,利用衛星OEM板卡的觀測數據和星歷數據,結合網絡獲取實時軌道鐘差改正產品,完成了嵌入式GPS/BDS實時PPP軟件的設計。軟件流程[12-15]如圖4所示。
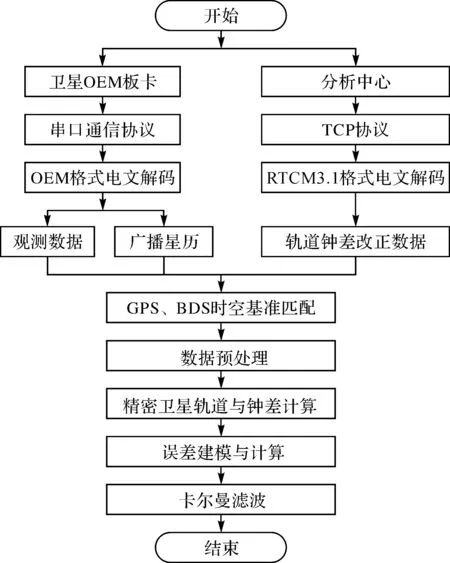
圖4 系統軟件
3 試驗驗證
在實際測試過程中,可能會遇到遮擋環境,導致GPS衛星數過少,GPS/BDS組合定位可以顯著增加定位衛星數,減小PDOP值,改善定位衛星的空間結構。本文分別在靜態環境和動態環境測試GPS單系統和GPS/BDS組合實時精密單點定位,并對測試結果進行分析對比,見圖5—圖8,以及表3—表4。
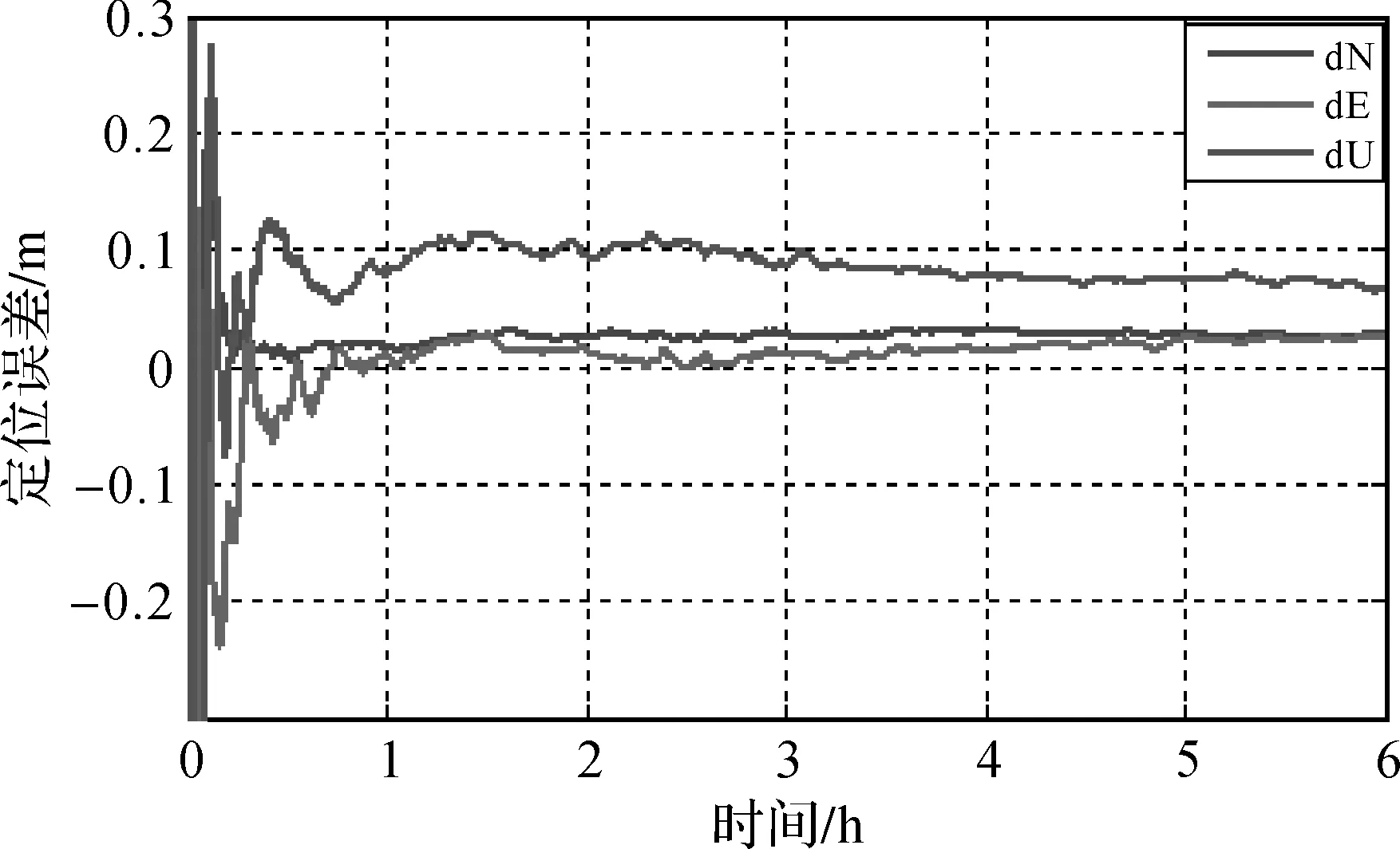
圖5 GPS靜態PPP
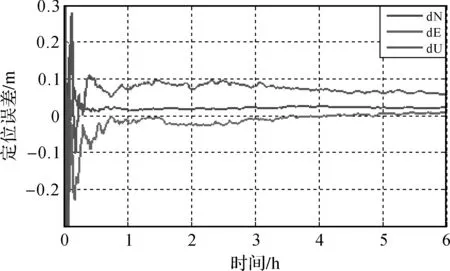
圖6 GPS/BDS靜態PPP

圖7 GPS動態PPP

圖8 GPS/BDS動態PPP

m
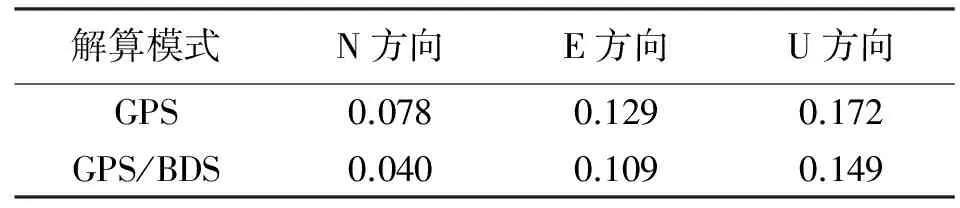
表4 動態PPP誤差RMS值 m
3.1 靜態測試
靜態測試選擇已知測點進行,數據采樣率為1 s,數據時長約為6 h,分別取測試1 h以后的數據統計誤差RMS值。通過該結果可以看到,GPS/BDS組合實時靜態精密單點定位可達到平面優于3 cm,高程優于8 cm。相對于GPS實時靜態精密單點定位,N方向提升了約1.2 cm,E方向提升了約0.5 cm,U方向提升了約0.5 cm。
3.2 動態測試
動態測試通過車載方式進行,數據采樣率為1 s,數據時長約為150 min。以Inertial Explorer軟件事后解算的結果作為真值,同樣取測試1 h以后的數據統計誤差RMS值。結果表明,GPS/BDS組合實時動態精密單點定位可達到平面優于12 cm,高程優于15 cm。相對于GPS實時動態精密單點定位,N方向提升了約3.8 cm,E方向提升了約2.0 cm,U方向提升了約2.3 cm,且收斂過程更為平滑。
4 結 語
本文討論了利用實時軌道鐘差增強改正信息,實現GPS/BDS實時精密單點定位的方法,并完成嵌入式便攜式設備的軟硬件設計,可以使PPP實時高精度定位擺脫應用場合的限制,具有重要的工程價值。
從本文的測試結果可以看到,在嵌入式設備上進行GPS/BDS雙系統實時定位時靜態可以達到平面優于3 cm,高程優于8 cm的定位精度;動態可以達到平面優于12 cm,高程優于15 cm的定位精度。將來隨著GPS和BDS實時精密產品精度的提高,嵌入式GPS/BDS實時PPP的定位精度將得到進一步提高和改善。
[1] 陳默,高成發.GPS精密單點定位靜態精度分析[J].現代測繪,2006,29(3)17-19.
[2] 賴允斌,趙春梅,李子申.不同星歷下實時精密單點定位精度分析[J].測繪通報,2015(8):9-12.
[3] YANG Y.Progress,Contribution and Challenges of Compass/Beidou Satellite Navigation System[J].Acta Geodaetica et Cartographica Sinica,2010,39(1):1-6.
[4] 董紅波,郭遲,崔競松,等.廣域實時精密定位的數據服務系統設計與驗證[J].小型微型計算機系統,2015,36(1):27-32.
[5] ZHANG X,GUO F,LI P,et al.Real-time Quality Control Procedure for GNSS Precise Point Positioing[J].Geomatics and Information Science of Wuhan University,2012,37(8):940-944.
[6] PAN S,CHEN W,JIN X,et al.Real-Time PPP Based on the Coupling Estimation of Clock Bias and Orbit Error with Broadcast Ephemeris[J].Sensors,2015,15(7):17808-17826.
[7] 王勝利,王慶,高旺.IGS實時產品質量分析及其在實時精密單點定位中的應用[J].東南大學學報,2013,43(2):365-369.
[8] 尹倩倩,樓益棟,易文婷.IGS實時產品比較與分析[J].大地測量與地球動力學,2012,32(6):123-128.
[9] LI X,DICK G,LU C,et al.Multi-GNSS Meteorology:Real-time Retrieving of Atmospheric Water Vapor From BeiDou,Galileo,GLONASS,and GPS Observations[J].IEEE Transactions on Geoscience & Remote Sensing,2015,53(12):6385-6393.
[10] 李蘆偉,潘樹國,毛琪,等.多模多頻CORS基站專用接收機設計與實現[J].現代測繪,2017,40(1):15-20.
[11] 韋東山.嵌入式Linux應用開發完全手冊[M].北京:人民郵電出版社,2008:76-86.
[12] YAN X.Differential RTCM Standards Decoded by C Program[J].Geotechnical Investigation & Surveying,2007,13(6):61-65.
[13] 孟祥廣,郭際明.GPS接收機(OEM)二進制文件向RINEX文件的轉換[J].測繪工程,2009,18(5):18-21.
[14] 高星偉,過靜珺,程鵬飛,等.基于時空系統統一的北斗與GPS融合定位[J].測繪學報,2012,41(5):743-748.
[15] LI P,ZHANG X.Modeling and Performance Analysis of GPS/GLONASS/BDS Precise Point Positioning[M]∥China Satellite Navigation Conference (CSNC) 2014 Proceedings:Volume Ⅲ.[S.l.]:Springer,2014:251-263.
猜你喜歡
家庭影院技術(2021年7期)2021-08-14 02:58:44
電子制作(2019年7期)2019-04-25 13:17:14
成都信息工程大學學報(2018年4期)2019-01-23 06:57:18
電子制作(2018年18期)2018-11-14 01:48:16
電子制作(2018年16期)2018-09-26 03:27:18
鐵道通信信號(2018年2期)2018-04-18 12:18:23
制造技術與機床(2017年3期)2017-06-23 08:11:50
電子制作(2017年8期)2017-06-05 09:36:15
電鍍與環保(2016年3期)2017-01-20 08:15:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
