DGPS加速度測(cè)量及試驗(yàn)驗(yàn)證
2018-03-06 12:28:41武若楠胡佩達(dá)吳秋平
導(dǎo)航定位學(xué)報(bào) 2018年1期
關(guān)鍵詞:測(cè)量實(shí)驗(yàn)
陳 銘,武若楠,胡佩達(dá),吳秋平
(清華大學(xué) 精密儀器系,北京 100084)
0 引言
重力場(chǎng)是一種反映地球特性的重要物理場(chǎng),它一方面能揭示地球內(nèi)部的結(jié)構(gòu)與成分,另一方面也影響著地球上的物理現(xiàn)象;因而重力場(chǎng)的測(cè)量有重要意義。重力場(chǎng)測(cè)量有地面測(cè)量法、衛(wèi)星重力測(cè)量法、海洋重力測(cè)量法與航空重力測(cè)量法等方法:地面測(cè)量精度高,但是需要測(cè)量人員逐點(diǎn)測(cè)量,成本高且效率低;衛(wèi)星重力測(cè)量能對(duì)全球重力場(chǎng)進(jìn)行測(cè)量,效率很高,但分辨率低;海洋重力測(cè)量實(shí)驗(yàn)精度、分辨率都符合要求,但由于其僅能測(cè)量海洋的重力場(chǎng),仍具有局限性;航空重力測(cè)量方法具有分辨率高、測(cè)量高效并且適應(yīng)絕大多數(shù)地形的優(yōu)點(diǎn),成為重力測(cè)量領(lǐng)域中一種有效的方法[1]。
航空重力測(cè)量的原理是利用重力儀測(cè)量重力加速度以及運(yùn)動(dòng)加速度在內(nèi)的所有加速度,再減去運(yùn)動(dòng)加速度,得到重力加速度值。全球定位系統(tǒng)(global positioning system,GPS)差分載波相位技術(shù)發(fā)展成熟后,運(yùn)動(dòng)加速度測(cè)量主要使用該方法。在中高分辨率的條件下,差分GPS(differential GPS,DGPS)載波相位技術(shù)測(cè)量的運(yùn)動(dòng)加速度精度能達(dá)到毫伽級(jí),是目前航空重力實(shí)驗(yàn)中運(yùn)載體加速度測(cè)量的最佳選擇。
在DGPS加速度測(cè)量方法出現(xiàn)前,重力儀的運(yùn)動(dòng)加速度補(bǔ)償主要依賴多普勒雷達(dá)或者激光高度儀。隨后氣壓高度計(jì)、雷達(dá)高度計(jì)等技術(shù)也相繼被應(yīng)用于加速度測(cè)量。這些加速度測(cè)量方法的精度均低于10 mGal,無(wú)法滿足高精度海空重力儀的要求。20世紀(jì)90年代以來(lái),GPS載波相位差分技術(shù)逐漸發(fā)展成熟,DGPS因?yàn)槠湓谖恢谩⑺俣取⒓铀俣葴y(cè)量中的高精度與穩(wěn)定性,被普遍運(yùn)用于海空重力測(cè)量領(lǐng)域。
載波相位差分技術(shù)測(cè)量加速度技術(shù)主要可分為2類(lèi):一類(lèi)為位置微分法,通過(guò)載波相位差分求出位置,再對(duì)位置2次微分求出載體運(yùn)動(dòng)加速度[2-4];另一類(lèi)為載波相位直接法,對(duì)載波相位差分后直接進(jìn)行2次微分,進(jìn)而求出載體運(yùn)動(dòng)加速度[5-7]。位置微分法要求位置有極高的位置精度與連續(xù)性。利用載波相位DGPS求解位置時(shí),需要計(jì)算整周模糊度。在長(zhǎng)基線情況下,整周模糊度的計(jì)算并不簡(jiǎn)單,如果加速度測(cè)量中整周模糊度有變化,那么2次微分后將對(duì)加速度測(cè)量值產(chǎn)生很大誤差。在長(zhǎng)時(shí)間的加速度測(cè)量中,GPS衛(wèi)星的星座會(huì)產(chǎn)生變化,這也會(huì)使加速度測(cè)量產(chǎn)生誤差。定位解算大多數(shù)使用的是現(xiàn)有的商業(yè)軟件,如Waypoint GrafNav,導(dǎo)航定位的細(xì)節(jié)保密,無(wú)法深入研究。載波相位法不需要解算位置,直接使用載波相位值的微分求解加速度,避免了求解精確的位置。同時(shí)還能對(duì)衛(wèi)星進(jìn)行加權(quán)最小二乘,解決星座變化的問(wèn)題[1]。故本文使用載波相位直接法計(jì)算加速度。
精確評(píng)估DGPS載波相位測(cè)量加速度方法的精度,目前仍是難點(diǎn),其中的關(guān)鍵問(wèn)題在于缺乏參考加速度。現(xiàn)在主要的評(píng)估方法有靜態(tài)實(shí)驗(yàn)與航空重力實(shí)驗(yàn)法[8]:靜態(tài)實(shí)驗(yàn)測(cè)量靜止時(shí)GPS天線的加速度、加速度輸出量即為加速度測(cè)量誤差,由于實(shí)際加速度測(cè)量環(huán)境為動(dòng)態(tài),該評(píng)估方法欠缺說(shuō)服力;而航空重力實(shí)驗(yàn)比較的是不同天線獨(dú)立測(cè)量得到的加速度值,利用不同測(cè)量值之間的差異衡量加速度測(cè)量精度,缺乏加速度真值。
本文設(shè)計(jì)了動(dòng)態(tài)轉(zhuǎn)臺(tái)實(shí)驗(yàn)來(lái)驗(yàn)證DGPS的加速度測(cè)量精度,通過(guò)將GPS天線固定在轉(zhuǎn)臺(tái)上并隨之轉(zhuǎn)動(dòng),在天線相位中心處會(huì)產(chǎn)生大小穩(wěn)定的向心加速度;比較GPS載波相位測(cè)得的加速度的模與基準(zhǔn)向心加速度的模,就能評(píng)估加速度測(cè)量方法的精度。
1 基于DGPS的加速度測(cè)量技術(shù)
接收機(jī)接收到的GPS載波的相位與接收機(jī)到衛(wèi)星的視線距離有關(guān)。利用載波相位的2次微分能夠計(jì)算得出接收機(jī)到衛(wèi)星的視線加速度。與定位算法類(lèi)似,只要可觀測(cè)衛(wèi)星數(shù)量足夠就能計(jì)算出接收機(jī)和衛(wèi)星的相對(duì)加速度。衛(wèi)星的加速度可以通過(guò)廣播星歷或事后精密星歷求出。
1.1 速度計(jì)算
圖1所示為地球、衛(wèi)星以及接收機(jī)之間的位置關(guān)系。圖中SV表示空產(chǎn)晨飛行器(space vehicle),即衛(wèi)星。
載波相位直接法計(jì)算加速度的基本方程為
(1)
對(duì)式(1)微分,得
(2)
(3)
(4)
載波相位與視線距離關(guān)系為

(5)
對(duì)式(5)進(jìn)行微分,如果沒(méi)有發(fā)生周跳,將多路徑誤差與相對(duì)論效應(yīng)誤差都合并到噪聲項(xiàng),可得
式中帶微分符號(hào)的為相關(guān)量的一階微分項(xiàng)。為了消除接收機(jī)與衛(wèi)星的誤差,引入?yún)⒖蓟緆與衛(wèi)星q,可得雙差觀測(cè)量
(7)

(8)
對(duì)于衛(wèi)星q,由式(4)和式(8)相減得

(9)
聯(lián)立式(8)與式(9),當(dāng)可觀測(cè)衛(wèi)星大于4顆時(shí),就能計(jì)算出接收機(jī)的速度。
1.2 加速度計(jì)算
對(duì)式(2)再次微分,得
(10)
又有
(11)
所以有
(12)
對(duì)于衛(wèi)星q,也能得出類(lèi)似或(2)的等式,將衛(wèi)星φ、q得出的2等式相減得:
(13)
對(duì)式(8)微分得:

(14)
聯(lián)立式(13)與式(14),可以計(jì)算得出接收機(jī)的加速度。
當(dāng)可見(jiàn)衛(wèi)星大于4顆時(shí),需要采用最小二乘法計(jì)算加速度。實(shí)際應(yīng)用中,衛(wèi)星的信號(hào)質(zhì)量不盡相同,衛(wèi)星的仰角、方位角等會(huì)影響信號(hào)質(zhì)量,造成載波相位誤差。如果簡(jiǎn)單將各個(gè)衛(wèi)星的信號(hào)無(wú)差別使用,那么不能獲得高精度加速度測(cè)量結(jié)果。使用加權(quán)最小二乘法能解決這一問(wèn)題,在使用加權(quán)最小二乘法計(jì)算加速度時(shí),如果使用的加權(quán)矩陣為各個(gè)衛(wèi)星載波相位誤差的協(xié)方差矩陣的逆矩陣,那么就能得到方差最小的結(jié)果[1-2]。
當(dāng)衛(wèi)星信號(hào)發(fā)生周跳時(shí),載波相位2次微分后就會(huì)產(chǎn)生跳變,引起很大的加速度測(cè)量誤差;因此在對(duì)衛(wèi)星信號(hào)進(jìn)行處理前,需要檢測(cè)連續(xù)的信號(hào)中是否存在周跳[9]。
在航空重力測(cè)量領(lǐng)域,由于接收機(jī)噪聲及其他噪聲的影響,未經(jīng)處理的加速度值誤差量級(jí)為百毫伽級(jí),遠(yuǎn)遠(yuǎn)不能滿足應(yīng)用需求。這些噪聲主要集中在高頻段,而重力信號(hào)則集中于低頻段;所以在測(cè)得初始加速度后,還要進(jìn)行低通濾波,獲取高精度的加速度。濾波器的設(shè)計(jì)對(duì)加速度的計(jì)算精度影響顯著。濾波器的通帶波動(dòng)率影響真實(shí)加速度信號(hào)的提取,而高頻衰減率則影響噪聲的抑制效果。使用Remez算法計(jì)算的切比雪夫一致逼近交錯(cuò)點(diǎn)組,與理想濾波器之間的偏差最小,能夠滿足通帶波動(dòng)率與高頻衰減率的要求;因此本文使用Remez算法進(jìn)行有限沖擊響應(yīng)(finite impulse response,F(xiàn)IR)低通濾波器設(shè)計(jì)[10-11]。給定低通濾波器的截止頻率、高頻衰減率與通帶波動(dòng)率后,能通過(guò)Remez算法計(jì)算得出濾波器系數(shù)。
2 實(shí)驗(yàn)與結(jié)果分析
為了驗(yàn)證DGPS載波相位測(cè)量加速度算法的精度,本文設(shè)計(jì)了轉(zhuǎn)臺(tái)實(shí)驗(yàn)。實(shí)驗(yàn)中將GPS天線固定在轉(zhuǎn)臺(tái)上,轉(zhuǎn)臺(tái)提供旋轉(zhuǎn)角速度,GPS天線會(huì)產(chǎn)生向心加速度;如果轉(zhuǎn)臺(tái)的角速度精度高,那么此向心加速度可以作為加速度基準(zhǔn)。利用加速度測(cè)量算法對(duì)這一加速度進(jìn)行測(cè)量并與加速度基準(zhǔn)進(jìn)行對(duì)比,就能驗(yàn)證算法的準(zhǔn)確性。
2.1 實(shí)驗(yàn)方案
動(dòng)態(tài)實(shí)驗(yàn)利用旋轉(zhuǎn)臺(tái)完成。將GPS天線放置于轉(zhuǎn)臺(tái)上,步進(jìn)電機(jī)驅(qū)動(dòng)轉(zhuǎn)臺(tái)轉(zhuǎn)動(dòng)。轉(zhuǎn)臺(tái)轉(zhuǎn)動(dòng)時(shí)會(huì)產(chǎn)生向心加速度,使用GPS對(duì)這一加速度進(jìn)行測(cè)量并同基準(zhǔn)加速度對(duì)比,就能驗(yàn)證GPS測(cè)加速度算法的準(zhǔn)確性。參考加速度通過(guò)轉(zhuǎn)臺(tái)轉(zhuǎn)動(dòng)的角速度以及GPS天線離轉(zhuǎn)臺(tái)中心的距離可以算出。
如圖2所示,實(shí)驗(yàn)開(kāi)始時(shí),將GPS移動(dòng)天線固定于旋轉(zhuǎn)臂上,將旋轉(zhuǎn)臂固定于轉(zhuǎn)臺(tái)上。同時(shí)在旁放置GPS基站天線,基站天線在實(shí)驗(yàn)過(guò)程中始終保持靜止。啟動(dòng)轉(zhuǎn)臺(tái),待轉(zhuǎn)臺(tái)轉(zhuǎn)動(dòng)平穩(wěn)后開(kāi)始記錄GPS移動(dòng)天線與基站天線的載波相位數(shù)據(jù)。轉(zhuǎn)臺(tái)的旋轉(zhuǎn)周期可以設(shè)置為160~240 s,當(dāng)旋轉(zhuǎn)半徑為0.5 m時(shí),GPS移動(dòng)天線相位中心處的向心加速度為30~70 mGal。轉(zhuǎn)臺(tái)平穩(wěn)轉(zhuǎn)動(dòng)1 000 s后,可以獲得足夠的載波相位數(shù)據(jù),從而計(jì)算出GPS移動(dòng)天線的加速度。
利用載波相位測(cè)量得到的加速度值是矢量值,坐標(biāo)系為地心地固(earth-centered earth-fixed,ECEF)坐標(biāo)系。基準(zhǔn)加速度為轉(zhuǎn)臺(tái)的向心加速度值,通過(guò)角速度的平方乘以旋轉(zhuǎn)半徑獲得,為標(biāo)量值。因此衡量加速度測(cè)量的精確度,通過(guò)對(duì)比測(cè)量加速度的模與基準(zhǔn)加速度評(píng)估。
2.2 實(shí)驗(yàn)設(shè)備
實(shí)驗(yàn)設(shè)備為2套GPS天線與接收機(jī)、高精度旋轉(zhuǎn)臺(tái)與控制器、旋轉(zhuǎn)臂、射頻電滑環(huán)。高精度旋轉(zhuǎn)臺(tái)與控制器提供動(dòng)態(tài)實(shí)驗(yàn)所需旋轉(zhuǎn)運(yùn)動(dòng),旋轉(zhuǎn)角速度的精度直接影響基準(zhǔn)加速度的精度。旋轉(zhuǎn)臂將GPS移動(dòng)天線固定在轉(zhuǎn)臺(tái)上,增加天線的旋轉(zhuǎn)半徑,以獲得更高的向心加速度。由于移動(dòng)天線一直旋轉(zhuǎn),連接移動(dòng)天線的射頻線需要通過(guò)射頻電滑環(huán)連接至接收機(jī)。
實(shí)驗(yàn)使用的轉(zhuǎn)臺(tái)為北京卓立漢光公司Rauk200型號(hào)轉(zhuǎn)臺(tái),控制器為該公司MC600。轉(zhuǎn)臺(tái)臺(tái)面直徑200 mm,中心最大載荷50 kg。轉(zhuǎn)臺(tái)通過(guò)步進(jìn)電機(jī)驅(qū)動(dòng),配備圓光柵測(cè)量旋轉(zhuǎn)角度實(shí)現(xiàn)閉環(huán)控制。轉(zhuǎn)臺(tái)具體參數(shù)如表1所示。
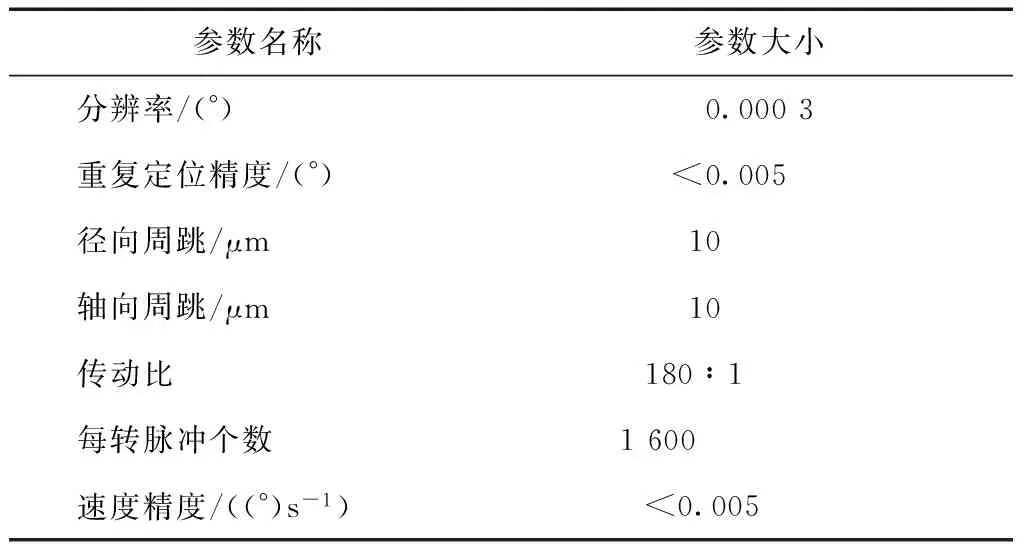
表1 轉(zhuǎn)臺(tái)參數(shù)
實(shí)驗(yàn)使用的GPS接收天線為Novatel公司GPS-703-GGG天線,接收機(jī)為Novatel公司的flexpak 6接收機(jī)。GPS天線與接收機(jī)的參數(shù)如表2所示。
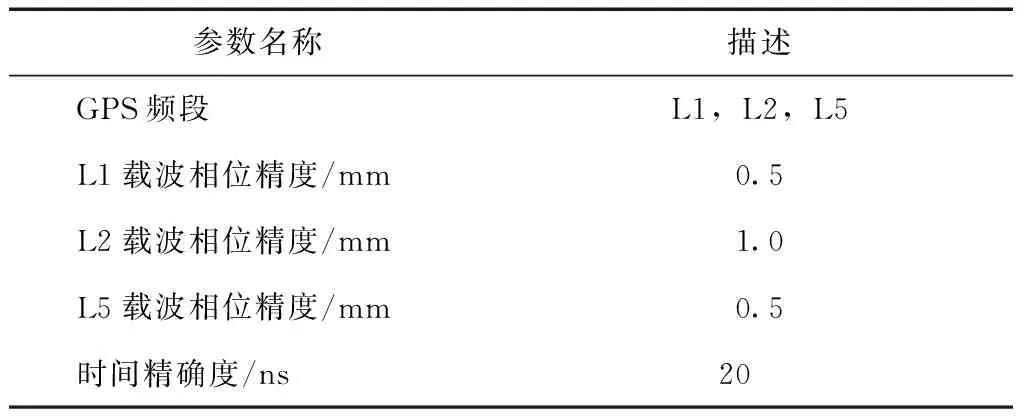
表2 GPS天線與接收機(jī)參數(shù)
在動(dòng)態(tài)實(shí)過(guò)程中,GPS天線持續(xù)旋轉(zhuǎn),GPS衛(wèi)星的方位角因此不斷改變。GPS-703-GGG天線相位中心穩(wěn)定,不會(huì)因?yàn)樾D(zhuǎn)導(dǎo)致飄移,保證了動(dòng)態(tài)實(shí)驗(yàn)的精度。
2.3 精度分析
動(dòng)態(tài)實(shí)驗(yàn)的精確度由基準(zhǔn)加速度與實(shí)際加速度的差值決定。動(dòng)態(tài)實(shí)驗(yàn)的基準(zhǔn)加速度值通過(guò)設(shè)定的角速度值與旋轉(zhuǎn)半徑計(jì)算。主要誤差因素有轉(zhuǎn)臺(tái)設(shè)定運(yùn)動(dòng)角速度與實(shí)際運(yùn)動(dòng)角速度的誤差,旋轉(zhuǎn)臂、轉(zhuǎn)臺(tái)與GPS天線的加工誤差帶來(lái)的旋轉(zhuǎn)半徑誤差。
基準(zhǔn)加速度
(15)
式中:wd為設(shè)定的轉(zhuǎn)臺(tái)旋轉(zhuǎn)角速度;r為GPS天線相位中心旋轉(zhuǎn)半徑。
在實(shí)際的動(dòng)態(tài)試驗(yàn)中,實(shí)際角速度與設(shè)定的角速度會(huì)有誤差,造成基準(zhǔn)加速度與實(shí)際加速度的誤差,即
(16)
式中:w為實(shí)際旋轉(zhuǎn)角速度;ar為實(shí)際旋轉(zhuǎn)加速度。
忽略2階小量,則加速度誤差為
Δa=2wd·Δw·r。
(17)
轉(zhuǎn)臺(tái)的角速度精度Δw為0.005(°)/s,實(shí)驗(yàn)中轉(zhuǎn)臺(tái)的角速度為2.250~1.500(°)/s,旋轉(zhuǎn)半徑為0.5 m,這部分造成的加速度誤差為0.2~0.3 mGal。
由于天線、轉(zhuǎn)臺(tái)、旋轉(zhuǎn)臂等加工定位的誤差,實(shí)際GPS天線旋轉(zhuǎn)半徑與理論旋轉(zhuǎn)半徑之間存在誤差。根據(jù)各部件的尺寸公差情況,這一誤差大概為3 mm。基準(zhǔn)加速度
ad=w2·rd。
(18)
式中rd為理論旋轉(zhuǎn)半徑。
考慮旋轉(zhuǎn)半徑誤差,實(shí)際加速度
ar=w2·rr=w2·(rd+Δr)。
(19)
式中:rr為實(shí)際半徑;Δr為半徑誤差;w為角速度。則加速度誤差
Δa=w2·Δr。
(20)
實(shí)驗(yàn)中轉(zhuǎn)臺(tái)角速度為2.250~1.500(°)/s,旋轉(zhuǎn)半徑造成的誤差為0.2~0.4 mGal。
綜上,轉(zhuǎn)臺(tái)實(shí)驗(yàn)基準(zhǔn)加速度與實(shí)際加速度的累計(jì)誤差大致為0.5 mGal;而GPS測(cè)加速度算法精確度要求為1 mGal:該實(shí)驗(yàn)?zāi)軌蛟u(píng)估加速度測(cè)量的精度。
2.4 結(jié)果分析
在2 d時(shí)間進(jìn)行了4組實(shí)驗(yàn):第1天2組實(shí)驗(yàn)轉(zhuǎn)臺(tái)旋轉(zhuǎn)周期分別為160與200 s,實(shí)驗(yàn)時(shí)長(zhǎng)50 min;第2天2組實(shí)驗(yàn)轉(zhuǎn)臺(tái)旋轉(zhuǎn)周期為200與240 s,實(shí)驗(yàn)時(shí)長(zhǎng)40 min。
動(dòng)態(tài)試驗(yàn)中,轉(zhuǎn)臺(tái)水平放置于水平面上,GPS天線因此也在水平面轉(zhuǎn)動(dòng)。GPS天線向心加速度指向旋轉(zhuǎn)中心,且在水平面內(nèi)轉(zhuǎn)動(dòng);因此GPS天線的加速度在東與北方向的分量按照正弦曲線變化,且2個(gè)方向分量存在90°相位差。在垂直方向,由于GPS天線沒(méi)有嚴(yán)格調(diào)水平,所以仍然存在加速度分量。轉(zhuǎn)臺(tái)周期160 s時(shí)東北地3方向加速度分量經(jīng)過(guò)低通濾波后如圖3所示,濾波器高頻衰減率為-100 dB,通帶波動(dòng)率為0.01 dB;可以看出,加速度測(cè)量值在東北地3方向分量符合預(yù)期。
轉(zhuǎn)臺(tái)周期為160、200、240 s時(shí),基準(zhǔn)加速度分別為77.11、49.35、34.27 mGal。表3~表6為4組GPS加速度測(cè)量算法實(shí)驗(yàn)的結(jié)果,其中均值數(shù)據(jù)為測(cè)量得到的加速度的模的均值,標(biāo)準(zhǔn)差為加速度的模的標(biāo)準(zhǔn)差。
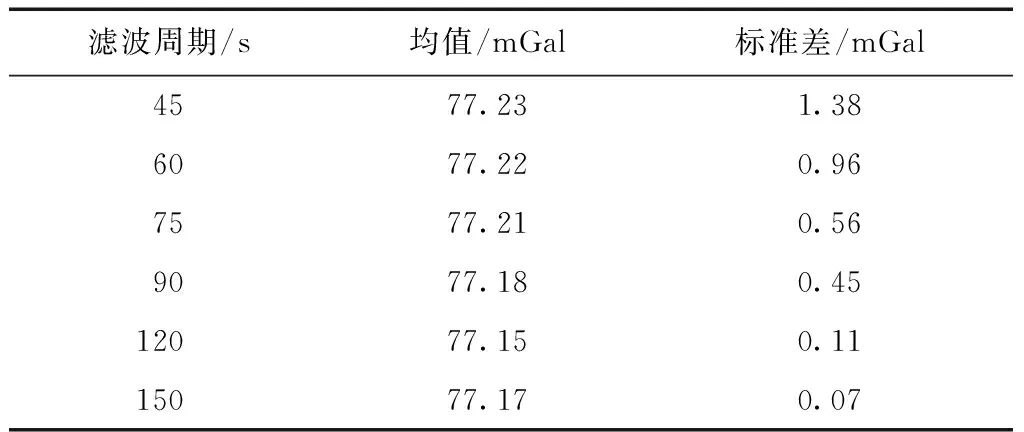
表3 轉(zhuǎn)臺(tái)周期160 s時(shí)加速度(真值為77.11 mGal)
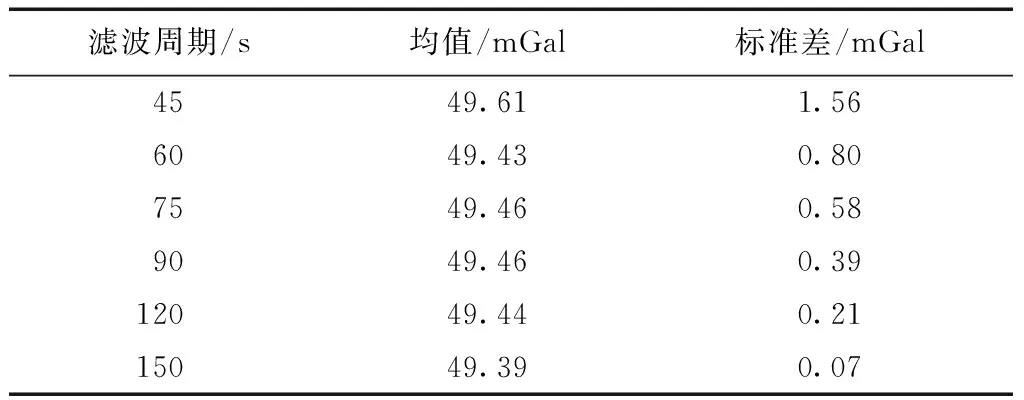
表4 轉(zhuǎn)臺(tái)周期200 s時(shí)加速度(真值為49.35 mGal)
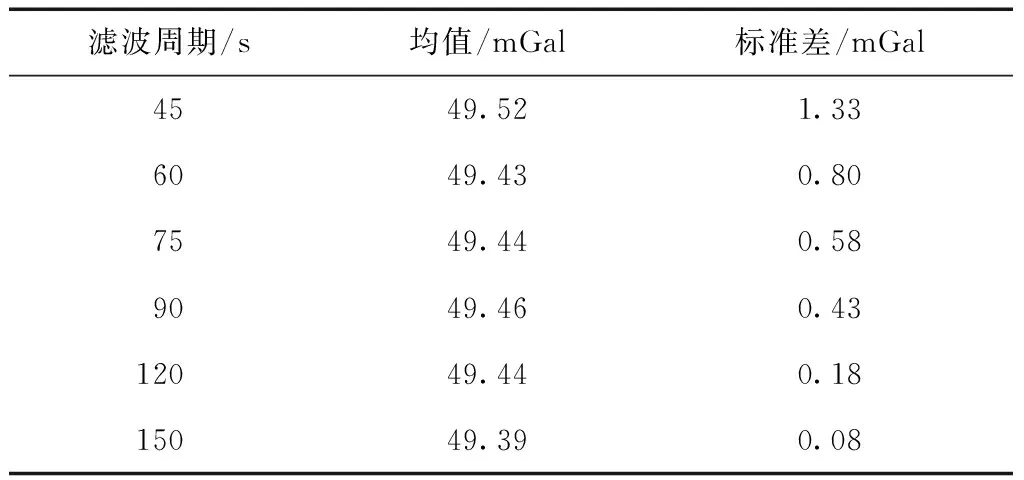
表5 轉(zhuǎn)臺(tái)周期200 s時(shí)加速度(真值為49.35 mGal)
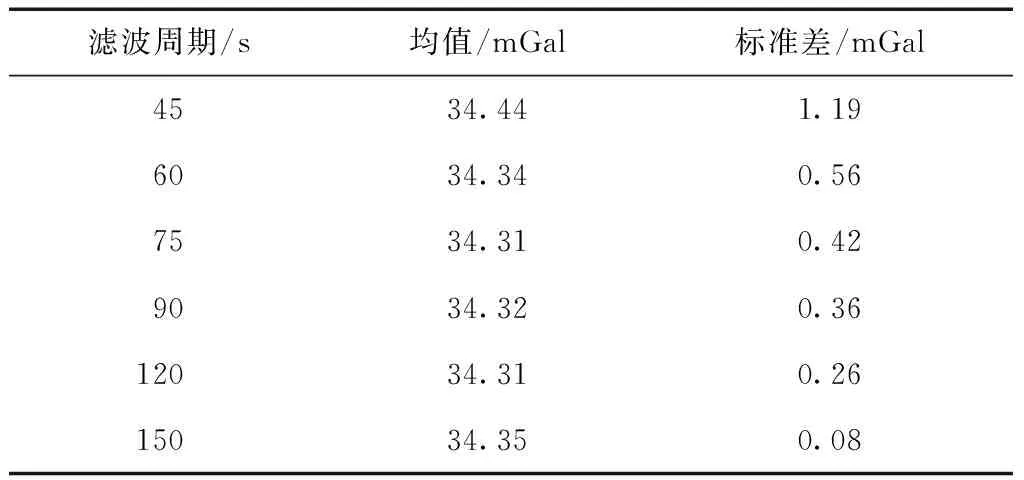
表6 轉(zhuǎn)臺(tái)周期240 s時(shí)加速度(真值為34.27 mGal)
在45 s的濾波周期條件下,加速度測(cè)量標(biāo)準(zhǔn)差小于1.5 mGal,平均值偏差小于0.3 mGal;60 s的濾波周期條件下,加速度測(cè)量標(biāo)準(zhǔn)差小于1 mGal,平均值偏差小于0.1 mGal;75 s濾波周期下,加速度測(cè)量標(biāo)準(zhǔn)差小于0.6 mGal,平均值偏差小于0.1 mGal;90 s濾波周期下,加速度測(cè)量標(biāo)準(zhǔn)差小于0.5 mGal,平均值偏差小于0.1 mGal;120 s濾波周期下,加速度測(cè)量標(biāo)準(zhǔn)差小于0.25 mGal,平均值偏差小于0.1 mGal;150 s濾波周期下,加速度測(cè)量標(biāo)準(zhǔn)差小于0.1 mGal,平均值偏差小于0.1 mGal。GPS載波相位測(cè)量加速度方法得到的加速度均值與參考加速度之間的誤差小于0.3 mGal,測(cè)量得到的加速度模偏大,可能是實(shí)際旋轉(zhuǎn)半徑大于理論旋轉(zhuǎn)半徑。加速度測(cè)量值的標(biāo)準(zhǔn)差隨著濾波周期的增大而減小,濾波周期大于60 s時(shí),標(biāo)準(zhǔn)差低于1 mGal。4組實(shí)驗(yàn)的加速度測(cè)量精度十分接近,說(shuō)明對(duì)于頻率范圍在0.004~0.006 Hz的加速度信號(hào),該方法能夠?qū)崿F(xiàn)有效測(cè)量。
3 結(jié)束語(yǔ)
本文實(shí)現(xiàn)了基于DGPS載波相位計(jì)算運(yùn)動(dòng)載體加速度的方法,并設(shè)計(jì)轉(zhuǎn)臺(tái)實(shí)驗(yàn)對(duì)該方法的精度進(jìn)行評(píng)估。利用轉(zhuǎn)臺(tái)旋轉(zhuǎn)時(shí)所產(chǎn)生的向心加速度作為參考基準(zhǔn),評(píng)估測(cè)量得到的加速度的模的精度。4組轉(zhuǎn)臺(tái)實(shí)驗(yàn)結(jié)果表明,濾波周期大于60 s時(shí),加速度的模的標(biāo)準(zhǔn)差小于1 mGal,并且標(biāo)準(zhǔn)差隨著濾波周期的增大而降低。DGPS載波相位測(cè)量加速度的方法能夠滿足1 mGal的航空重力測(cè)量要求。調(diào)整GPS天線使其保持水平,以測(cè)出東北天3方向的加速度測(cè)量精度是下一步需要解決的問(wèn)題。
[1] KENNEDY S L.Acceleration estimation from GPS carrier phases for airborne gravimetry[D].Calgary:The University of Calgary,2002.
[2] BRUTON A M,GLENNIE C L,SCHWARZ K P.Differentiation for high-precision GPS velocity and acceleration determination[J].GPS solutions,1999,2(4):7-21.
[3] BRUTON A M,SCHWARZ K P.Deriving acceleration from DGPS:toward higher resolution applications of airborne gravimetry[J].GPS Solutions,2002,5(3):l-14.
[4] BROZENA J M,MADER G L,PETERS M F.Interferometric global positioning aystem:three-dimensional positioning source for airborne gravimetry[J].Journal of GeoPhysical Research,1989,94(B9):12153-12162.
[5] KWON J H,JEKELI C.A new approach for airborne vector gravimetry using GPS/INS[J].Journal of Geodesy,2001,74:690-700
[6] JEKELI C,GARCIA R.GPS phase accelerations for moving-base vector gravimetry[J].J Geodesy,1997,71(10):630-639.
[7] SALAZER D,HERNANDEZ P M,JUAN J,et al.GNSS data management and processing with the GPSTk[J].GPS Solutions,2010,14(3):293-299.
[8] 張開(kāi)東.基于SINS/DGPS的航空重力量方法研究[D].長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué),2007.
[9] 彭秀英.GPS周跳探測(cè)與修復(fù)的算法研究與實(shí)現(xiàn)[D].青島:中國(guó)石油大學(xué),2007.
[10] 肖云,夏哲仁.航空重力測(cè)量中載體運(yùn)動(dòng)加速度的確定[J].地球物理學(xué)報(bào),2003,46(1):62-67.
[11] 孫中苗,石磐,夏哲仁.利用GPS和數(shù)字濾波技術(shù)確定航空重力測(cè)量中的垂直加速度[J].測(cè)繪學(xué)報(bào),2004,33(2):111-115.
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
