智能上肢假肢氣動平衡機構的優化設計
2018-03-05 12:33:25樊炳輝宗亞偉高圣志
機械設計與制造 2018年2期
樊炳輝,宗亞偉,高圣志,王 凱
(山東科技大學 機器人研究中心,山東 青島 266590)
1 引言
假肢是一種利用工程技術方法和手段,針對截肢者或肢體不完全缺損者而特別設計、制作和裝配的人工假體。它的重要作用是彌補失去肢體的特定功能,使佩戴者恢復一定的生活自理和工作能力。其適用對象是因交通事故、工傷事故、疾病、運動創傷等原因造成的截肢者。按截肢部位假肢分為上肢假肢和下肢假肢。就上肢假肢而言,電動假肢為較常見上肢假肢,電動假肢為外動力式假肢,靠小型機電驅動系統來實現假肢各關節的預定動作,達到傷殘者基本上能滿足生活自理,以致參加適當的工作的目的。此種假肢適合于前臂甚至全臂缺損者使用。
新式電動假肢的驅動系統一般采用體積小、功率大的舵機,可以實現讓假肢抓取一定質量的重物,但是由于假肢肩部關節為垂直關節機構,以及本身重力矩的存在,導致假肢抓取重物的質量偏小,為此需要考慮如何提高假肢抓取重物的能力,由于假肢的設計安裝空間有限,更換體積功率較大的舵機不現實,因此,為了何提高假肢抓取重物的能力,需要為假肢設計重力平衡裝置。針對以上問題,以一種智能上肢假肢為基礎,利用優化理論設計了一種假肢氣動平衡機構,可以有效的平衡假肢重力矩,提高假肢抓取重物的能力。
2 建立機構優化設計模型
2.1 確定氣動平衡機構結構形式
智能上肢假肢結構原理圖,如圖1所示。位于肩部的假肢大臂驅動舵機,驅動假肢大臂及以下的結構前后擺動,可以實現整個手臂向后擺動10°,向前擺動90°。為了平衡掉大臂部分重力矩,從而減小假肢大臂驅動舵機的驅動力矩,為假肢大臂設計安裝了一種氣動平衡機構。氣動桿的安裝要注意:需滿足假肢大臂在其運動范圍內無運動干涉、無自鎖現象等。通過建立機構數學模型,利用MATLAB獲得了氣動平衡機構的最優解,即氣動桿的最佳安裝位置和合適的推力大小,并輸出其仿真模型以及優化過程圖解。此外依據數據的運動仿真和獲得的計算機圖形也驗證了結果是正確的。事例表明針對智能上肢假肢所設計的氣動平衡機構可以有效的平衡假肢大臂重力矩,減小大臂驅動力矩。
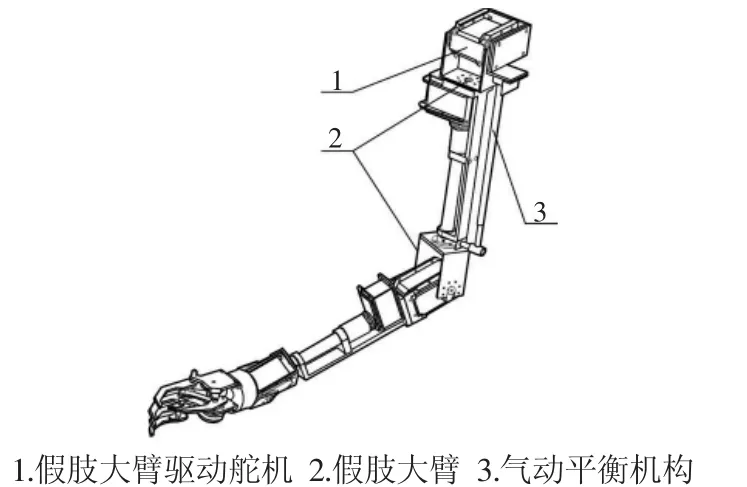
圖1 智能上肢假肢結構原理圖Fig.1 Intelligent Upper Limb Structure Principle Diagram
此智能上肢假肢氣動平衡機構的目的是平衡假肢大臂及其以下部位的重力矩,從而減小假肢大臂的驅動力矩,故氣動桿上支點將固定在在靠近肩部位置的機架上,下支點將安裝在大臂上,其具體安裝原理圖,如圖2所示。其中,智能上肢假肢初始狀態正面圖,如圖2(a)所示。智能上肢假肢自然垂放側面圖,如圖2(b)所示。智能上肢假肢前后擺動過程中側面圖,如圖2(c)所示。智能上肢假肢向前擺動至水平狀態側面圖,如圖2(d)所示。該智能上肢假肢氣動平衡機構主要由氣動桿與假肢大臂構成,大臂在無運動的初始狀態時其中心軸線為一鉛垂線,此時從正面方向和從側面方向看大臂重力矩為0,當假肢大臂擺動時將產生重力矩,到前擺端平狀態大臂重力矩達到最大,在此運動過程中,氣動桿的推力將平衡掉假肢大臂部分重力矩。氣動桿兩端的安裝形式均為一種球鉸形式,并且氣動桿在伸縮過程中其推力的大小基本保持不變的特性,利用氣動桿該特性,設計氣動桿和大臂精確的結構形式和安裝尺寸,使得智能上肢假肢滿足結構更為緊湊,耗能更小,運動啟動更快且無運動干涉的目的。
2.2 確定氣動平衡機構優化設計變量
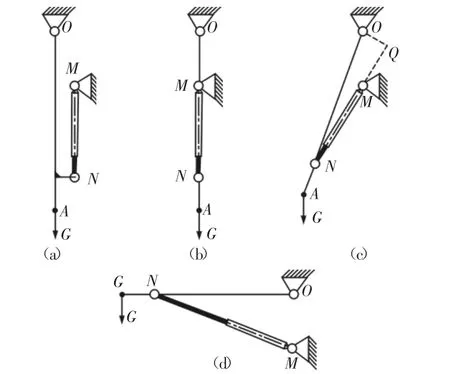
圖2 智能上肢假肢運動示意圖Fig.2 Motion Diagram of Intelligent Upper Limb Prosthesis
智能上肢假肢運動示意圖,如圖2所示。圖中:O點—假肢肩部旋轉關節點位置;M點—氣動桿上支點安裝位置;x1—距離O點距離,為一設計變量,且氣動桿上支點M的位置相對大臂的擺動是固定的,N點為氣動桿下支點安裝位置,距離O點距離為x2,為一設計變量,N點的位置是安裝在大臂上,是隨大臂的運動而改變的,N2為大臂運動到某一時刻時氣動桿下支點的位置,氣動桿推力F在伸縮過程中基本恒定,推力值為x3,為一設計變量。
在大臂轉動過程中,大臂與水平方向的夾角為α,為方便后面的仿真計算,在此設定大臂從水平開始向下擺動,其擺動角度沒范圍為(0~100)°,這種設定不影響最總計算結果。在MATLAB中,以x1、x2、x3為設計變量,考慮現實情況,另它們的取值在一定的限定范圍內,并在此范圍內對它們進行了初始化的賦值,編寫智能上肢假肢大臂氣動平衡機構優化設計程序,建立相應的運動參數數學模型,即擺動重力矩Mg1和Mg2、氣動平衡機構平衡力矩MP、殘余重力矩M1、M2等運動參數的數學模型:

式中:L1—大臂無負載重力臂;L2—大臂有負載重力臂;Mg1—無負載重力矩;m1—無負載大臂質量;Mg2—有負載重力矩;m2—有負載大臂和負載總質量;MN2—運動過程中氣動桿長度;OQ—有負載和無負載時氣動桿力臂;MP1—無負載時氣動桿平衡力矩為;MP2—有負載時氣動桿平衡力矩為;M1—無負載時殘余重力矩;M2—有負載時殘余重力矩;g—重力加速度。
2.3 確定約束函數
根據智能上肢假肢大臂的結構空間、氣動桿的工作性能、保證假肢大臂在其活動范圍內無自鎖、無運動干涉等方面要求,設計關于所有設計變量的約束函數,約束條件如下:

2.4 確定目標函數
在優化設計計算的過程中,智能上肢假肢分為有負載和無負載兩種狀態,分別求出這兩種狀態下大臂擺動時的重力矩與氣動桿推力產生的平衡力矩的差值以及此差值的最大值,比較這兩種情況下的差值的最大值,較大者為目標函數:


式中:M1i=Mg1i-MP1i—無負載擺動時大臂的殘余重力矩在不同時刻的大小,i=1,2,3…;M2i=Mg2i-MP2i—有負載擺動時大臂的殘余重力矩在不同時刻的大小,i=1,2,3…;f1(x)—無負載擺動時大臂的殘余重力矩絕對值最大值;f2(x)—有負載擺動時大臂的殘余重力矩絕對值最大值;,min(f(x))—f1(x)和f2(x)中的最大值,即為目標函數。優化設計的最終結果是讓f(x)達到最小,也就是讓智能上肢假肢大臂擺動時大臂重力矩與氣動桿的平衡力矩之差的絕對值的最大值達到最小。
3 輸出優化結果及其運動仿真圖
已知假肢重量為2kg,抓取重物質量為1kg,為固定值,為其他各待優化設計變量賦初值,OM=20mm,ON=200mm,假肢大臂的擺動范圍設置為(0~100)°,按程序運行框圖,如圖3所示。運行在MATLAB中編制的優化程序,,調用軟件工具箱中的函數,利用復合型優化設計算法,獲得智能上肢假肢氣動平衡機構優化計算的結果:

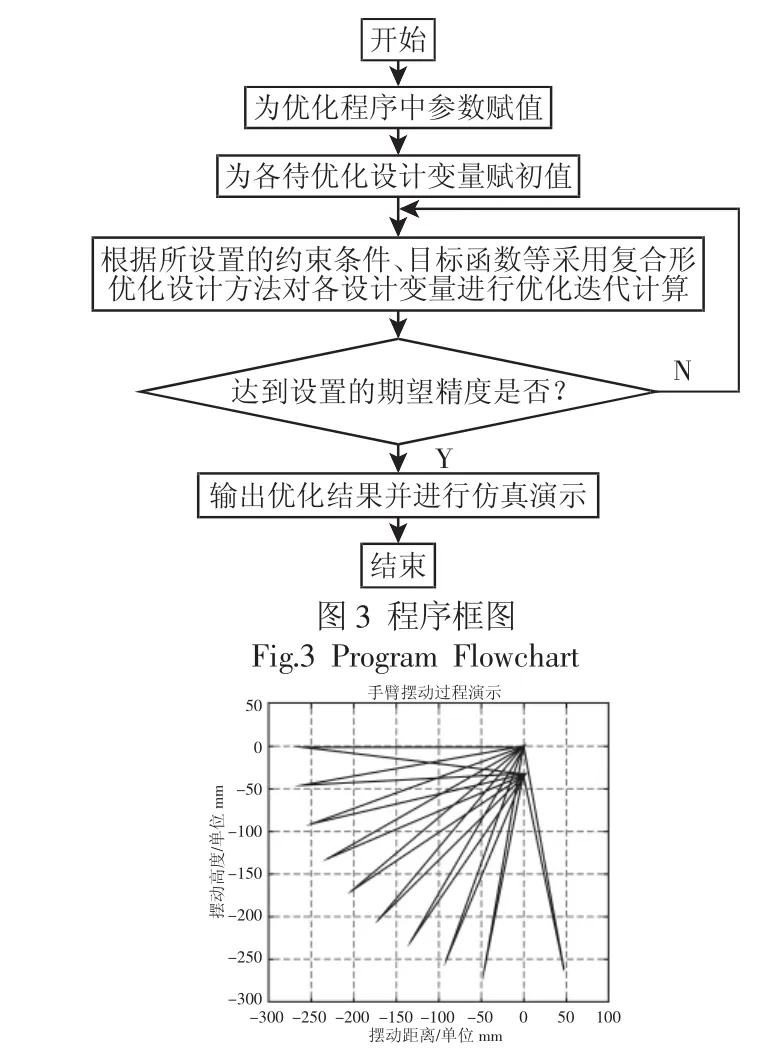
圖4 智能上肢假肢大臂運動過程仿真Fig.4 Motion Process Simulation of Upper Arm of Intelligent Upper Limb Prosthesis
利用獲得的優化設計計算結果,運行MATLAB編輯運算仿真程序,繪制出了機構的運動仿真圖形,智能上肢假肢氣動平衡機構在大臂擺動運動過程中的仿真曲線,如圖4所示。大臂運動過程中,無氣動平衡機構時大臂有負載、無負載重力矩變化曲線和有氣動平衡機構的作用下,大臂有負載、無負載殘余重力矩變化曲線,如圖5所示。
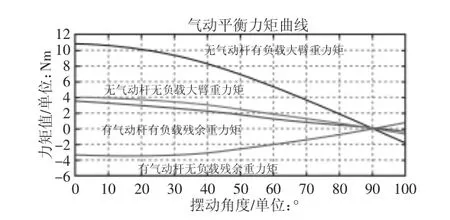
圖5 氣動平衡力矩曲線圖Fig.5 Graph of Torque of Pneumatic Balance Mechanism
4 結論
針對減小智能上肢假肢大臂驅動舵機力矩問題,對氣動平衡機構的優化設計進行了研究,以重力矩和平衡力矩為優化目標,建立機構數學模型,利用MATLAB獲得了氣動平衡機構的最優解,即氣動桿的最佳安裝位置和合適的推力大小,并繪制其仿真模型和優化過程圖解,在該氣動平衡機構在工作范圍內可以平衡掉75%以上的重力矩,目前此智能上肢假肢已經做出了實體樣機,實踐證明了對肩部大臂驅動舵機氣動平衡的優化結果能有效的減少驅動力矩。
[1]龔純,王正林.精通MATLAB最優化計算[M].北京:電子工業出版社,2009.(Gong Chun,Wang Zheng-lin.Proficient in MATLAB Optimization Calculation[M].Beijing:Publishing House of Electronics Industry,2009.)
[2]劉惟信.機械最優化設計[M].北京:清華大學出版社,1994.(Liu Wei-xin.Mechanical Optimum Design[M].Beijing:Tsinghua University Press,1994.)
[3]郭仁生.機械工程設計分析和MATLAB應用[M].北京:機械工業出版社,2008.(Guo Ren-sheng.Mechanical Engineering Design Analysis and MATLAB Application[M].Beijing:China Machine Press,2008.)
[4]陳立周.機械優化設計方法[M].北京:冶金工業出版社,2005.(Chen Li-zhou.Mechanical Optimal Design Method[M].Beijing:Metallurgical Industry Press,2005.)
[5]樊炳輝,鄒吉祥,孫高祚.肩離斷多自由度機器人型假肢肩部氣動平衡機構的優化設計[J].機械設計與制造.2011(7):9-11.(Fan Bing-hui,Zou Ji-xiang,Sun Gao-zuo.Optimization design on pneumatic balance structure of MDOF robotic prosthesis’s shoulder[J].Machinery Design & Manufacture,2011(7):9-11.)
[6]樊炳輝,曹燕杰,鄒吉祥.一種康復用多自由度假肢肘關節氣動平衡機構的優化設計[J].機械傳動,2011(1):66-68.(Fan Bing-hui,Cao Yan-jie,Zou Ji-xiang.Optimal design of a kind of aerodynamic balance structure for multiple degrees of freedom prosthetic elbow joint using for recovery[J].Mechanical Drive,2011(1):66-68.)
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
