軋機(jī)液壓壓下系統(tǒng)多平臺(tái)建模與仿真分析
2018-03-05 12:33:08李強(qiáng)強(qiáng)靳寶全張紅娟
機(jī)械設(shè)計(jì)與制造 2018年2期
李強(qiáng)強(qiáng),靳寶全,高 妍,張紅娟
(太原理工大學(xué) 新型傳感器與智能控制教育部重點(diǎn)實(shí)驗(yàn)室,山西 太原 030024)
1 引言
軋機(jī)是根據(jù)需求軋制金屬材料的復(fù)雜設(shè)備,在帶鋼、型鋼等金屬制品的生產(chǎn)過程已得到廣泛應(yīng)用。其軋材質(zhì)量的控制是通過液壓壓下系統(tǒng)的動(dòng)態(tài)反饋控制實(shí)現(xiàn)[1]。軋機(jī)液壓壓下系統(tǒng)是涵蓋了機(jī)械、電氣、液壓三態(tài)于一體的復(fù)雜系統(tǒng),其軋制過程連續(xù)復(fù)雜,且在線實(shí)驗(yàn)成本相對(duì)較高,使得建模和仿真成為研究軋機(jī)液壓壓下系統(tǒng)性能、改進(jìn)軋制工作控制參數(shù)不可或缺的手段。文獻(xiàn)[2]建立了基于AMESim的軋機(jī)液壓壓下AGC仿真模型,通過對(duì)液壓缸活塞桿位移分析確定系統(tǒng)振動(dòng)故障;文獻(xiàn)[3]利用Simulink建立了液壓壓下AGC數(shù)學(xué)模型并進(jìn)行仿真分析,測(cè)得了系統(tǒng)動(dòng)態(tài)響應(yīng)參數(shù)。文獻(xiàn)[4]利用MATLAB和ADAMS建立了機(jī)械臂的聯(lián)合虛擬仿真模型,并進(jìn)行了運(yùn)動(dòng)學(xué)分析。使用機(jī)械或液壓軟件進(jìn)行建模和仿真能夠發(fā)揮軟件平臺(tái)優(yōu)勢(shì),降低在線實(shí)驗(yàn)工作量,為改善軋機(jī)設(shè)計(jì)制造工藝提供了依據(jù)。為更精確模擬實(shí)時(shí)工況,設(shè)計(jì)具有抗干擾能力的多平臺(tái)協(xié)同建模和仿真的方法,不僅能夠充分的發(fā)揮各軟件的領(lǐng)域優(yōu)勢(shì),而且使復(fù)雜系統(tǒng)具有更好的抗干擾能力和穩(wěn)定性,仿真結(jié)果也更加貼近實(shí)際[5-6]。基于ADAMS2014、MATLAB2014a和AMESimR13三個(gè)軟件的平臺(tái),對(duì)軋機(jī)液壓壓下系統(tǒng)的機(jī)械力學(xué)部分、算法控制部分和液壓驅(qū)動(dòng)系統(tǒng)分別建模并進(jìn)行聯(lián)合仿真,以充分的發(fā)揮多軟件平臺(tái)優(yōu)勢(shì),為準(zhǔn)確分析系統(tǒng)參數(shù)提供依據(jù)。建立基于干擾觀測(cè)器的聯(lián)合仿真控制模型,能夠有效消除外部干擾噪聲對(duì)系統(tǒng)穩(wěn)定性造成的影響,提高系統(tǒng)控制精度,仿真結(jié)果更具實(shí)際參考價(jià)值。
2 子模型建立
液壓壓下閉環(huán)控制原理,如圖1所示。液壓伺服系統(tǒng)一般采用位置反饋控制方式,首先人工設(shè)定一軋制厚度預(yù)期值,與軋輥傳感器的厚度反饋值比較做差,差異值經(jīng)控制器算法處理后作為液壓伺服閥的電流輸入,驅(qū)動(dòng)液壓缸動(dòng)作壓下軋輥負(fù)載;工作輥上的位置傳感器將實(shí)時(shí)監(jiān)測(cè)值作為軋制厚度值,反饋給控制系統(tǒng)以形成閉環(huán)控制回路。在中,使用ADAMS建立軋機(jī)機(jī)械系統(tǒng)模型,用AMESim搭建液壓系統(tǒng)模型,用Simulink建立控制算法模型。

圖1 液壓壓下閉環(huán)控制原理圖Fig.1 Hydraulic Pressure Closed-Loop Control Schematic
2.1 ADAMS機(jī)械模型建立
以某廠四輥軋機(jī)為原型,經(jīng)實(shí)地測(cè)量和等效計(jì)算,得到的軋機(jī)幾何和質(zhì)量參數(shù),并根據(jù)此參數(shù)在ADAMS/View環(huán)境搭建包括軋機(jī)主要部件在內(nèi)的機(jī)械系統(tǒng)模型,如表1所示。軋機(jī)機(jī)械系統(tǒng)動(dòng)力學(xué)三維模型圖,如圖2所示。而后添加部件間的約束關(guān)系和作用力定義軋機(jī)模型的動(dòng)力學(xué)參數(shù)。

表1 模型軋輥參數(shù)Tab.1 Roll Model Parameters
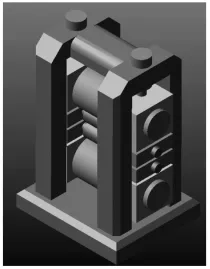
圖2 軋機(jī)液壓系統(tǒng)動(dòng)力學(xué)模型圖Fig.2 Mill Hydraulic System Dynamics Model Diagram
2.2 AMESim液壓模型建立
按負(fù)載匹配確定液壓動(dòng)力元件參數(shù),首先要選擇合適的伺服閥,通過查詢機(jī)械設(shè)計(jì)手冊(cè),根據(jù)負(fù)載參數(shù)確定了負(fù)載重量和彈性力級(jí)別,因負(fù)載數(shù)值較大故取供油壓力值為31MPa。由于液壓缸直接作用于負(fù)載,則可求出液壓缸的有效面積AP。按照負(fù)載最佳匹配原則,取負(fù)載壓力為:

式中:Ps—供油壓力。
液壓缸的有效面積AP為:
式中:FL—負(fù)載力。

取活塞桿直徑d=1000mm,液壓缸活塞直徑D=1200mm。伺服閥的負(fù)載流量按最大速度確定,則負(fù)載流量為qL=vmaxAP,這里取伺服閥最大流速vmax=0.02m/s。此時(shí)伺服閥壓降Pv為:

根據(jù)Pv和qL,查閱伺服閥壓降-流量曲線知額定流量為400 L/min的伺服閥可以滿足要求。這樣通過計(jì)算就得到了的液壓伺服系統(tǒng)的參數(shù),如表2所示。電液伺服閥使用軟件庫提供的四通閥,根據(jù)表2參數(shù)進(jìn)行設(shè)置,加入力和位移的傳感器,采用導(dǎo)入方式添加ADAMS機(jī)械模型接口,利用軟件工具創(chuàng)建Simulink接口,按照液壓控制原理和閉環(huán)回路控制原理完成液壓模型的建模。簡(jiǎn)化的液壓壓下系統(tǒng)的模型,如圖3所示。左側(cè)接口模塊為ADAMS軟件接口,vf為活塞桿位移傳感器檢測(cè)的力輸出,vdis和gdis分別為機(jī)械模型上下工作輥的位移輸入;右側(cè)接口模塊為Simulink軟件接口,Aboveroll和Lowerroll分別為機(jī)械模型上下工作輥的位移輸出,Controlsigle為控制模型計(jì)算的電液伺服閥電流輸入。

表2 液壓模型參數(shù)Tab.2 Hydraulic Model Parameters
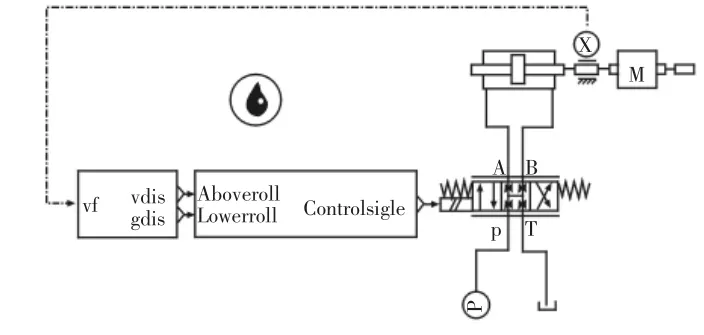
圖3 軋機(jī)壓下系統(tǒng)液壓部分模型圖Fig.3 Mill Hydraulic Pressure System Diagram
2.3 Simulink控制模型建立
基于ADAMS機(jī)械模型和AMESim液壓模型采用閉環(huán)控制系統(tǒng),這里主要以單純的位置伺服控制進(jìn)行介紹,設(shè)計(jì)采用比例積分控制方法。控制原理為:在工作開始后,固定在機(jī)械設(shè)備上的位置傳感器將軋輥位置信號(hào)通過接口傳遞進(jìn)來,與給定值即人工設(shè)定的軋制厚度做差,偏差由比例積分環(huán)節(jié)運(yùn)算處理,并對(duì)結(jié)果整流后通過接口傳遞給液壓伺服閥驅(qū)動(dòng)液壓缸動(dòng)作,繼續(xù)向下或向上推拉支撐輥,以使軋輥的工作輥位置發(fā)生變化,輥縫不斷接近設(shè)定值,直到輥縫達(dá)到設(shè)定值區(qū)域范圍且穩(wěn)態(tài)誤差符合控制精度要求。在Simulink窗口利用搭建的液壓壓下系統(tǒng)控制回路,回路中的任何參數(shù)都可以用示波器觀看并通過工具導(dǎo)出到文件進(jìn)行處理和研究,如圖4所示。圖中的接口文件是通過軟件的自定義工具設(shè)計(jì),連接Simulink和其它軟件的輸入輸出變量,Aboveroll和Lowerroll分別為連接液壓模型的上下工作輥的位移輸入,Controlsigle為對(duì)液壓模型電液伺服閥的電流輸出。設(shè)置控制回路比例系數(shù)K=16,積分系數(shù)I=0.1。
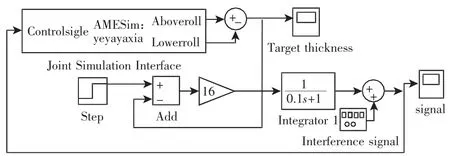
圖4 反饋控制Simulink模型圖Fig.4 Simulink Model Diagram
3 干擾觀測(cè)器設(shè)計(jì)
干擾觀測(cè)器的工作原理,如圖5所示。將外部干擾噪聲信號(hào)或模型內(nèi)部激變?cè)斐傻膶?shí)際輸出與模型輸出的偏差等效到控制輸入端,即觀測(cè)出等效干擾。在控制模型中添加對(duì)干擾噪聲信號(hào)的等效補(bǔ)償,實(shí)現(xiàn)對(duì)噪聲信號(hào)的完全抑制[8-9]。其中,GP(s)為控制對(duì)象傳遞函數(shù),G-1n(s)為控制模型的等效逆。經(jīng)計(jì)算推導(dǎo),可以得到從u到y(tǒng)和d到y(tǒng)的傳遞函數(shù)為:
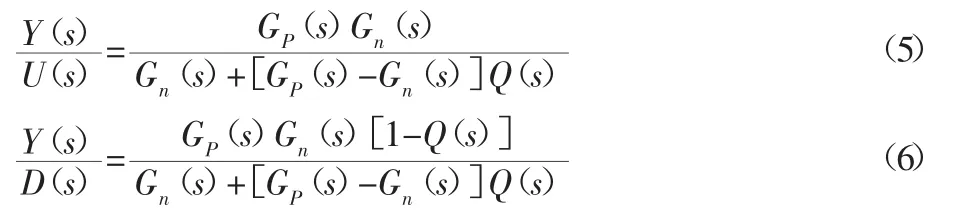
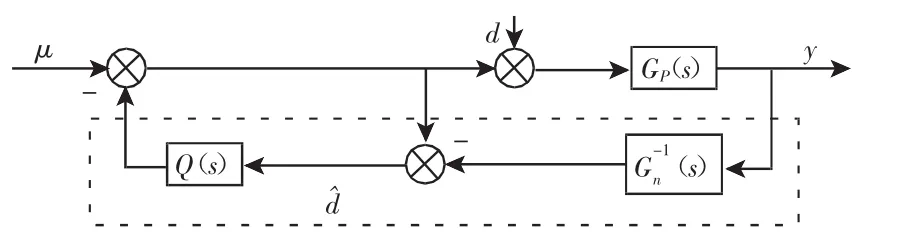
圖5 干擾觀測(cè)器原理圖Fig.5 Disturbance Observer Schematic
設(shè)計(jì)干擾觀測(cè)器的主要環(huán)節(jié)就是設(shè)計(jì)低通濾波器Q(s)。首先,Q(s)的設(shè)計(jì)必須滿足Q(s)的相對(duì)階要大于等于Gn(s)的相對(duì)階;其次,Q(s)的帶寬必須能夠滿足干擾觀測(cè)器抑制能力,同時(shí)保證魯棒穩(wěn)定性。Q(s)設(shè)計(jì)的常用法則為:在低頻段,Q(s)=1;在高頻段,Q(s)=0。用常用設(shè)計(jì)方法,對(duì)低通濾波器Q(s)進(jìn)行設(shè)計(jì),其表達(dá)式為:
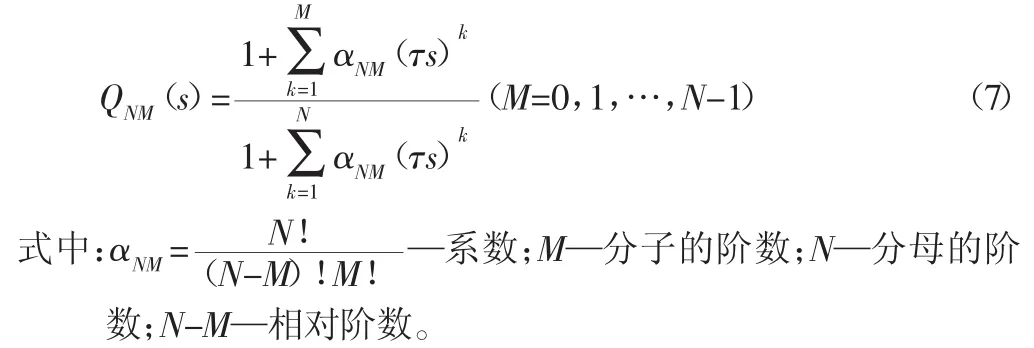
該濾波器設(shè)計(jì)的主要工作為確定參數(shù)N、M和τ。要同時(shí)滿足三個(gè)條件:一是N和M的取值要滿足Q(s)G-n1(s)正則的同時(shí)物理可實(shí)現(xiàn);二是Q(s)的濾波器的階數(shù)要盡量小;三是Q(s)的帶寬由參數(shù)τ的取值決定。控制對(duì)象為軋機(jī)壓下位置伺服控制系統(tǒng),根據(jù)等效原理將輸出反饋端等效前移,省去求解多參數(shù)的麻煩。綜上,設(shè)計(jì)該低通濾波器Q(s)的相對(duì)階數(shù)為三個(gè),設(shè)計(jì)Q(s)的結(jié)構(gòu)為:

4 聯(lián)合仿真分析
該聯(lián)合仿真以AMESim作為中介軟件并在Simulink環(huán)境下對(duì)仿真進(jìn)程進(jìn)行控制,利用ADAMS模型中位于工作輥的傳感器實(shí)時(shí)監(jiān)測(cè)量做反饋參數(shù),經(jīng)接口傳遞給控制模型的輸入端與人工設(shè)定值比較,而后由比例積分器對(duì)偏差運(yùn)算處理,其結(jié)果作為電液伺服閥的電流控制量,控制伺服控制流量和壓力的變化,驅(qū)動(dòng)液壓缸活塞桿移動(dòng),液壓缸位置傳感器將活塞桿實(shí)時(shí)驅(qū)動(dòng)位移通過軟件接口傳遞給機(jī)械軋輥,形成對(duì)軋件的厚度和力的軋制,綜上,軋機(jī)液壓壓下系統(tǒng)通過軟件接口和傳感器數(shù)據(jù)監(jiān)測(cè)實(shí)現(xiàn)多軟件平臺(tái)的聯(lián)合仿真控制[10]。研究的聯(lián)合仿真是以Simulink作為控制軟件,設(shè)置AMESim軟件處于Simulation mode模式,設(shè)置仿真時(shí)長(zhǎng)為10 s,仿真步長(zhǎng)為0.001 s。在Simulink控制模型中,設(shè)置干擾信號(hào)發(fā)生器的噪聲為零,仿真時(shí)長(zhǎng)為10s。運(yùn)行仿真在Simulink、AMESim兩個(gè)軟件中得到以下曲線數(shù)據(jù),同時(shí)在共仿真模式下查看機(jī)械模型中軋輥受力及運(yùn)動(dòng)動(dòng)畫。
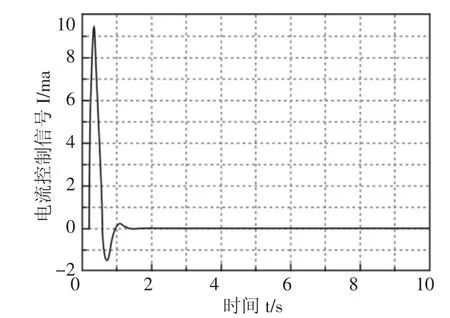
圖6 電流控制信號(hào)隨時(shí)間變化曲線Fig.6 Electric Control Signal Versus Time Curve

圖8 干擾信號(hào)隨時(shí)間變化曲線Fig.8 Interference Signal Versus Time Curve
聯(lián)合仿真主要以運(yùn)動(dòng)學(xué)仿真為主,主要考查模型及其控制系統(tǒng)的穩(wěn)定性和位移變化相關(guān)特性。在無干擾情況下,電流控制信號(hào)曲線中可以看出,電液伺服閥的控制電流輸入信號(hào)在控制開始階段迅速上升,其電流值峰值為9.6 mA未超出伺服閥最大控制電流值10 mA,可見該仿真的參數(shù)設(shè)計(jì)比較合理,既能夠保證響應(yīng)的快速性,又留有一定余度,如圖6所示。電流控制信號(hào)響應(yīng)在達(dá)到峰值后迅速下降,表明伺服閥控制流量在軋制厚度達(dá)到人工設(shè)定值1 mm后快速下降并趨于穩(wěn)定;再如軋制厚度曲線迅速達(dá)到穩(wěn)態(tài)1 mm后趨于穩(wěn)定,可見整個(gè)系統(tǒng)是穩(wěn)定的,如圖7所示。同時(shí)軋制厚度穩(wěn)定后的曲線顯示軋輥在達(dá)到穩(wěn)定后仍存在極其微弱的振動(dòng),振幅約為0.005 mm,滿足控制精度設(shè)計(jì)要求。仿真方案符合實(shí)際設(shè)計(jì)要求。設(shè)置干擾信號(hào)源的恒定干擾和隨機(jī)干擾信號(hào),從仿真時(shí)間1 s開始,持續(xù)干擾值為2 mA,隨機(jī)干擾信號(hào)為不規(guī)則振動(dòng)且最大振幅為0.5 mA,如圖9所示。
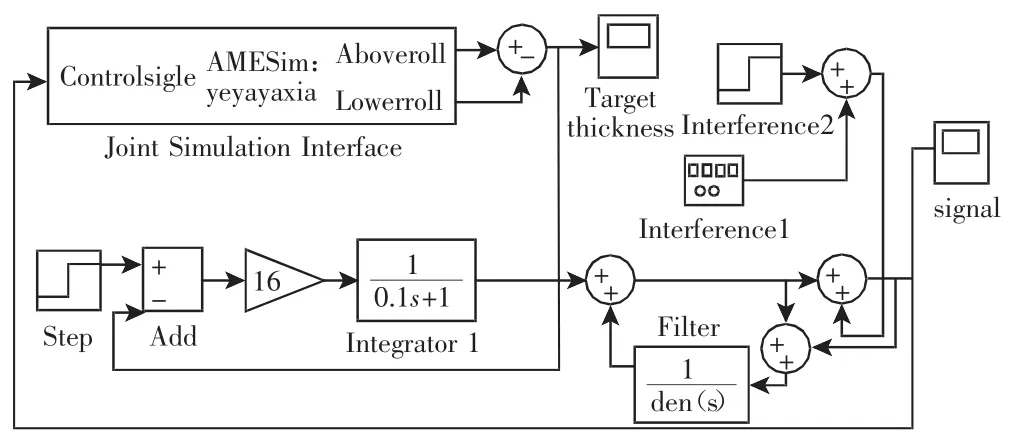
圖9 干擾觀測(cè)器控制模型圖Fig.9 Disturbance Observer Control Model Diagram
運(yùn)行仿真,如圖10所示。電流控制信號(hào)在1s干擾加入時(shí)間上升到2mA,而后下降并于恒定0mA上下穩(wěn)定,證明干擾的加入只是暫時(shí)增加了電流控制信號(hào),局部響應(yīng)而后穩(wěn)定,系統(tǒng)的宏觀穩(wěn)定性并沒有發(fā)生變化。但軋制厚度變化明顯,總體控制曲線圖在干擾加入后快速響應(yīng)上升,在趨于穩(wěn)定后在1.125mm上下振動(dòng)變化,振動(dòng)幅度也隨時(shí)間不斷變化,最大振幅為0.02mm,遠(yuǎn)遠(yuǎn)超出系統(tǒng)設(shè)計(jì)要求的控制精度,說明整個(gè)軋機(jī)液壓系統(tǒng)的控制是不穩(wěn)定的,如圖11所示。在干擾加入之后,系統(tǒng)已不再保持穩(wěn)定,軋制的產(chǎn)品也不符合質(zhì)量要求,需要對(duì)干擾信號(hào)進(jìn)行處理。根據(jù)干擾觀測(cè)器設(shè)計(jì)原理,如圖10所示加入設(shè)計(jì)的低通濾波器,將干擾信號(hào)通過反饋等效濾除。運(yùn)行仿真,得到電流控制信號(hào)和軋制厚度曲線圖。電流控制曲線在干擾加入后響應(yīng)上升到2mA而后迅速下降恢復(fù)到無干擾時(shí)的正常控制曲線,證明干擾觀測(cè)器有效濾除恒定干擾信號(hào)影響,且對(duì)整個(gè)系統(tǒng)的控制趨勢(shì)和過程影響不大,系統(tǒng)的穩(wěn)定性沒有受到影響,如圖12所示。軋制厚度曲線,如圖13所示。
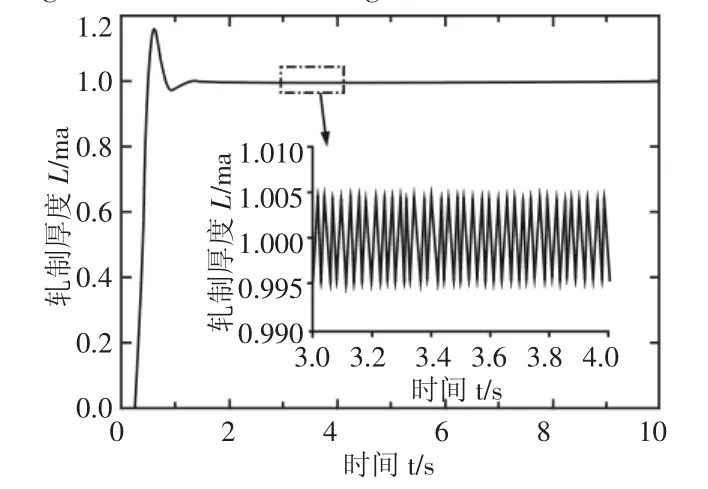
圖13 軋制厚度隨時(shí)間變化曲線Fig.13 Rolling Thickness Versus Time Curve
軋制厚度曲線與無干擾曲線沒有變化,干擾造成的穩(wěn)定值變大已經(jīng)濾除,且最大振蕩幅度減小到0.005mm,符合液壓系統(tǒng)設(shè)計(jì)的控制精度要求,抑制了隨機(jī)振動(dòng)干擾信號(hào)影響。綜上,基于干擾觀測(cè)器的PI設(shè)計(jì),使該聯(lián)合仿真能夠抑制了干擾噪聲。對(duì)系統(tǒng)穩(wěn)定性的破壞,消除了干擾對(duì)控制精度的影響,該虛擬樣機(jī)可應(yīng)用于軋機(jī)液壓壓下系統(tǒng)分析。
5 結(jié)論
運(yùn)用Simulink、AMESim和ADAMS建立了模擬四輥軋機(jī)液壓壓下系統(tǒng)的虛擬樣機(jī),通過設(shè)計(jì)基于干擾觀測(cè)器的比例積分串聯(lián)Simulink控制模型,并通過多平臺(tái)聯(lián)合仿真進(jìn)行驗(yàn)證表明,該虛擬樣機(jī)可應(yīng)用于軋機(jī)液壓壓下系統(tǒng)分析。針對(duì)軋機(jī)液壓壓下系統(tǒng)實(shí)際工作中的外部干擾噪聲,在Simulink控制模型添加干擾觀測(cè)器模塊,通過與加入隨機(jī)振動(dòng)和持續(xù)干擾信號(hào)對(duì)比仿真分析,證明帶有干擾觀測(cè)器的仿真模型能夠有效模擬實(shí)際工況,抑制外部干擾噪聲造成的系統(tǒng)不穩(wěn)定性,消除干擾對(duì)控制精度的影響。
[1]Berecz,T.Majlinger,K.Orbulov.Observer Based Leakage Detection of Hydraulic Cylinder Applied in Rolling Mill[C].Materials Science Forum,2013:729
[2]吳炳勝,穆銀兵.基于AMESim軋機(jī)液壓系統(tǒng)振動(dòng)仿真[J].液壓與氣動(dòng),2014(11):78-81.(Wu Bing-sheng,Mu Yin-bing.Simulation on Vibration of Rolling Mill Hydraulic System Based on AMESim[J].Chinese Hydraulics and Pneumatics,2014(11):78-81.)
[3]譚樹彬,鐘云峰,劉建昌.軋機(jī)輥縫控制建模及仿真[J].系統(tǒng)仿真學(xué)報(bào),2006,18(6):1425-1427.(Tan Shu-bin,Zhong Yun-feng,Liu Jian-chang.Modeling and Simulation of Rolling Gap Control in Strip Mills[J].Journal of System Simulation,2006,18(6):1425-1427.)
[4]馬如奇,郝雙暉,鄭偉峰.基于MATLAB與ADAMS的機(jī)械臂聯(lián)合仿真研究[J].機(jī)械設(shè)計(jì)與制造,2010(4):93-95.(Ma Ru-qi,Hao Shuang-hui,Zheng Wei-feng.Research on Coordinated Simulation of Robot Arm Based on MATLAB and ADAMS[J].Machinery Design&Manufacture,2010(4):93-95.)
[5]楊陽,鄒佳航,楊洋.混合動(dòng)力汽車再生制動(dòng)壓力協(xié)調(diào)控制系統(tǒng)[J].機(jī)械工程學(xué)報(bào),2014,50(22):200-202.(Yang Yang,Zou Jia-hang,Yang Yang.Pressure Coordinated Control System for HEV Regenerative Braking[J].Journal of Mechanical Engineering,2014,50(22):127-135.)
[6]馬長(zhǎng)林,黃先祥,李鋒.基于軟件協(xié)作的多級(jí)液壓缸起豎系統(tǒng)建模與仿真研究[J].系統(tǒng)仿真學(xué)報(bào),2006,18(S2):523-525.(Ma Chang-lin,Huang Xian-xiang,Li Feng.Studies for Modeling and Simulation of Erecting System with Multi-stage Cylinder Based on Software Collaboration[J].Journal of System Simulation,2006,18(S2):523-525.)
[7]張紹德,陳主成.一種基于干擾觀測(cè)器的伺服系統(tǒng)設(shè)計(jì)[J].電子科技大學(xué)學(xué)報(bào),2015,34(1):85-88.(Zhang Shao-de,Chen Zhu-cheng.Design Method for Servo-system Based on Disturbance Observer[J].Journal of University of Electronic Science and Technology of China,2015,34(1):85-88.)
[8]李奇軍,龔俊,寧會(huì)峰.垂直運(yùn)動(dòng)永磁同步直線電機(jī)的復(fù)合控制研究[J].機(jī)械設(shè)計(jì)與制造,2014(9):62-68.(Li Qi-jun,Gong Jun,Ning Hui-feng.Study on Control Characteristics of Vertical Movement Permanent Magnet Linear Synchronous Motor[J].Machinery Design&Manufacture,2014(9):62-68.)
[9]尹正男,蘇劍波,高秀行.保證閉環(huán)系統(tǒng)魯棒穩(wěn)定性的干擾觀測(cè)器系統(tǒng)性設(shè)計(jì)方法[J].自動(dòng)化學(xué)報(bào),2012,38(1):12-22.(Yin Zheng-nan,Su Jian-bo,Gao Xiu-xing.Systematic Design Method of Disturbance Observer Guaranteeing Closed-loop System's Robust Stability[J].Acta Automatica Sinica,2012,38(1):12-22.)
[10]李劍峰,汪建兵,林建軍.機(jī)電系統(tǒng)聯(lián)合仿真與集成優(yōu)化案例解析[M].北京:電子工業(yè)出版社,2010:137-162.(Li Jian-feng,Wang Jian-bing,Lin Jian-jun.Case Study on Joint Simulation and Integrated Optimization of Electromechanical System[M].Beijing:Publishing House of Electronics Industry,2010:137-162.)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
