熔模炸藥鑄型冒口自動(dòng)去除機(jī)構(gòu)設(shè)計(jì)
2018-03-05 12:32:20高宏力李世超任效龍
機(jī)械設(shè)計(jì)與制造 2018年2期
王 勇,高宏力,李世超,任效龍
(西南交通大學(xué) 機(jī)械工程學(xué)院,四川 成都 610031)
1 引言
冒口的去除方法取決于鑄件材料和鑄型,我們所研究的是一種炸藥熔模鑄型冒口的去除方法。該熔鑄型炸藥是烈性炸藥,屬于易燃易爆物質(zhì),其生產(chǎn)成型加工是一個(gè)極其危險(xiǎn)的工藝。目前該工藝還是采用人工錘擊的辦法,而人為的不可控,存在不可預(yù)估的危險(xiǎn)性。我國(guó)八、九十年代就成熟運(yùn)用如切割澆冒口的帶鋸機(jī)[1]、液控多向氣動(dòng)錘[2]等根據(jù)鑄造材料提出的去除冒口方法。在近期一些近代鑄件清理方式[3]的研究中還提到:鑄件清理過(guò)程中還是人工敲除冒口。這種清除冒口的方法:一方面由于人為因素很難保證冒口斷裂質(zhì)量;另一方面,沒(méi)能把人從惡劣工作環(huán)境中解放出來(lái),不符合人文發(fā)展的要求。綜合以上所述的澆冒口去除方法,對(duì)于炸藥熔模鑄型冒口去除方法相關(guān)的研究較少。在作業(yè)現(xiàn)場(chǎng),冒口的去除方法依然是人工敲除,該工藝存在很高的危險(xiǎn)性。第二部分運(yùn)用斷裂力學(xué)及理論力學(xué)研究了冒口斷裂的方式及斷裂理論力的大小,分析了冒口的斷裂運(yùn)動(dòng)。第三部分進(jìn)行冒口去除機(jī)構(gòu)的設(shè)計(jì)。第四部分實(shí)驗(yàn)論證。最后一部分是總結(jié)。
2 冒口斷裂的理論分析
2.1 力學(xué)分析
冒口斷裂分析需要解決兩個(gè)問(wèn)題:一是斷裂力學(xué)行為分析;從斷裂力學(xué)和冒口的斷裂運(yùn)動(dòng)出發(fā),設(shè)計(jì)機(jī)構(gòu)來(lái)耦合冒口的斷裂運(yùn)動(dòng)。另一個(gè)是斷裂理論力學(xué),研究冒口的斷裂判據(jù)[4、7],提出最佳的冒口去除方法。實(shí)體模型圖,如圖1所示。模型尺寸:彈體高H1=168mm,直徑d0=200mm;冒口圓錐高H2=109mm,大徑d1=86mm,小徑d2=57mm。根據(jù)冒口實(shí)際結(jié)構(gòu),分析其容易失效的截面以及斷裂的原因和機(jī)理。從斷裂力學(xué)角度來(lái)看,斷裂分為三種形式,即I型斷裂、II型斷裂和III型斷裂[4]。該冒口的斷裂屬于I型斷裂,即張開(kāi)型斷裂,實(shí)體冒口預(yù)設(shè)有水平周向縮頸裂紋,符合I型的斷裂條件。對(duì)于 I型斷裂:由于 KII=0,則有 cosθ0=1=1,θ0=0即純I型斷裂裂紋的開(kāi)裂角度為θ0=0,裂紋沿所在的平面開(kāi)裂和擴(kuò)展。此時(shí),應(yīng)力的分量描述為θ0=0時(shí),在裂紋延長(zhǎng)線上的應(yīng)力分布
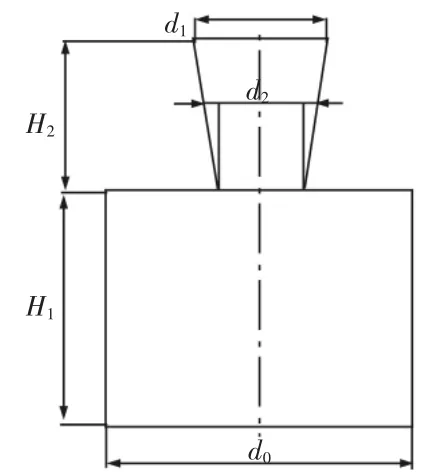
圖1 實(shí)體模型Fig.1 Solid Model
τxy=0時(shí),拉應(yīng)力分量最大,裂紋最容易沿著x軸方向擴(kuò)展。斷裂判據(jù)及斷裂韌度為強(qiáng)度因子,Y是裂紋形狀系數(shù)(1~2)。對(duì)于任何含有裂紋的結(jié)構(gòu)的構(gòu)件:應(yīng)力值、裂紋長(zhǎng)度增長(zhǎng)或同時(shí)增加,都導(dǎo)致強(qiáng)度因子的增加。當(dāng)Kl達(dá)到某一個(gè)極限值時(shí),裂紋將出現(xiàn)失穩(wěn)擴(kuò)張,即發(fā)生斷裂[5]。因此斷裂判據(jù)條件為。所以,當(dāng)達(dá)到斷裂判據(jù)條件,而開(kāi)裂角θ0=0時(shí),拉應(yīng)力分量最大,斷裂沿x軸方向,可以獲得較好的冒口斷裂面,此時(shí)也是最佳的斷裂方式。已知冒口斷裂判據(jù)和斷裂條件,應(yīng)用結(jié)構(gòu)力學(xué)計(jì)算冒口斷裂時(shí)所需要作用力的大小,如表1所示。表1有四種不同的施力方式下冒口材料斷裂最小值[6]。從表中可以直觀的看出,施加水平力時(shí),所需要的作用力最小,而純剪力時(shí)最大。因此,施加水平力是最佳的施力方式。
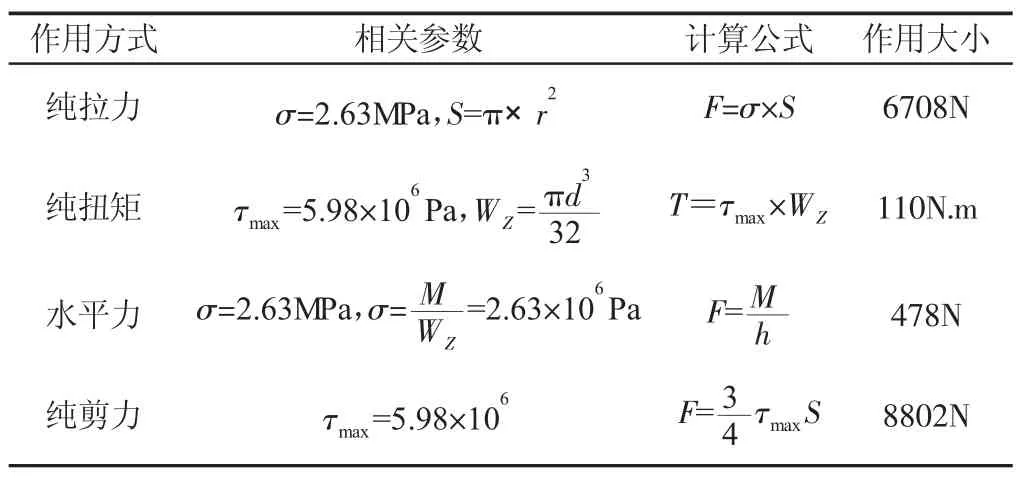
表1 斷裂極限值Tab.1 The Fracture Limit Table
2.2 Workbench仿真分析
文獻(xiàn)[8]基于有限元的疲勞分析方法及實(shí)踐,詳述了機(jī)械零件的疲勞分析過(guò)程。應(yīng)用workbench仿真分析熔模鑄件也能達(dá)到預(yù)期值。根據(jù)實(shí)際實(shí)驗(yàn)材料為525水泥,其彈性模量為E=1.5×1010Pa,泊松比為μ=0.30,密度為ρ=3.10×103kg/m3,分析結(jié)果如圖所示。純拉力:應(yīng)用workbench里的結(jié)構(gòu)靜力仿真模塊,添加模塊后,設(shè)置相關(guān)參數(shù),添加約束,施加6708N的拉力,最后運(yùn)算求解。得應(yīng)力為2.6777MPa,而材料許用應(yīng)力是2.63MPa,結(jié)果與實(shí)際相近,所以理論計(jì)算是科學(xué)的。結(jié)果,如圖2(a)所示。水平力:水平力的仿真與拉力的仿真方法一樣。所求應(yīng)力為2.8236MPa與許用應(yīng)力2.63MPa比較相近,因此,理論計(jì)算合理。結(jié)果,如圖3(b)所示。純扭力:扭力仿真應(yīng)力為6.271MPa,許用應(yīng)力是5.98MPa,結(jié)果也是科學(xué)合理的。仿真結(jié)果,如圖2(c)所示。剪切力的仿真與以上方法相似,這里不再贅述。從仿真結(jié)果可以明顯看出應(yīng)力最大處是在冒口與彈體連接處,也就是斷裂發(fā)生的頸縮斷裂處,與預(yù)期結(jié)果相同,如圖2所示。
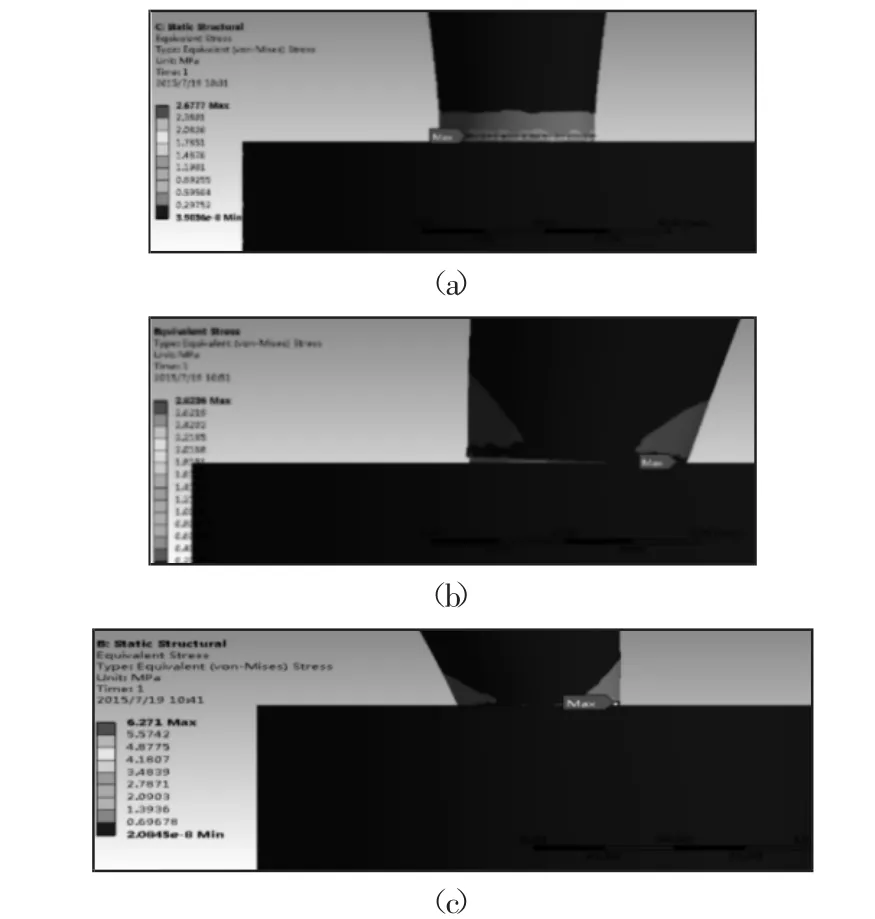
圖2 Workbench仿真Fig.2 Simulation of the Workbench
3 機(jī)械結(jié)構(gòu)設(shè)計(jì)與分析
3.1 機(jī)構(gòu)力學(xué)模型建立及優(yōu)化
實(shí)際敲擊過(guò)程是一個(gè)瞬態(tài)過(guò)程,文獻(xiàn)[9]給出了弧面凸輪機(jī)構(gòu)的設(shè)計(jì)與校核思路。根據(jù)實(shí)際使用要求,提出力學(xué)模型。如圖3所示分別建立圖 3(a)、圖 3(b)、圖 3(c)三種模型,對(duì)模型建立力學(xué)方程及優(yōu)化對(duì)比:模型圖3(a),力學(xué)方程為F+(-F)=ma=0。模型圖3(b),力學(xué)方程為其中r是lBP,θ是lBP與F力方向的夾角,而F=G1-G2,G1是施加的水平力,G2是冒口斷裂所需力的大小。模型圖3(c),力學(xué)方程為:斷裂瞬間F=ma,斷裂后其中 v1隨著F1的減小而減小,同時(shí)r1是在限定的范圍內(nèi)減小一定量。三個(gè)模型的提出和力學(xué)方程的建立,依據(jù)是實(shí)際使用要求。從模型圖3(a)到圖 3(b),再到圖 3(c)是力學(xué)模型的優(yōu)化設(shè)計(jì)過(guò)程。模型圖 3(a),由于爪手的夾持作用,使得冒口與機(jī)械手成為剛性體,敲擊力F被剛性體直接抵消。對(duì)模型圖3(a)優(yōu)化,得到模型圖3(b)。在模型圖3(b)中,θ值越大,力 Fsinθ(θ<π/2)就越大,并且動(dòng)力系統(tǒng)的附加剛度也隨著θ增大而減小。但是依然存在附加剛度,還有運(yùn)動(dòng)干涉,不滿足運(yùn)動(dòng)要求。為了減小附加剛度,消除運(yùn)動(dòng)干涉,提出優(yōu)化模型圖3(c)。模型圖3(c)是在BP上裝減振器C和減振器D,減振器C消除水平方向的剛度和運(yùn)動(dòng)干涉,減振器D限制爪手的旋轉(zhuǎn)運(yùn)動(dòng),提高加工安全。因此,綜合三種模型的優(yōu)缺點(diǎn),模型圖3(c)滿足最優(yōu)設(shè)計(jì)要求。
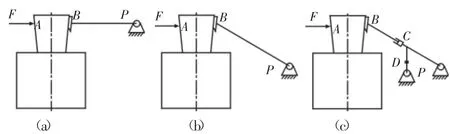
圖3 三種動(dòng)力學(xué)模型Fig.3 Three Kinds of Dynamic Model
3.2 機(jī)構(gòu)的工作原理
從前面我們已經(jīng)知道:以最優(yōu)的方式提供作用力,當(dāng)滿足斷裂判據(jù)時(shí),冒口將以張開(kāi)型發(fā)生斷裂。跟據(jù)實(shí)際模型和冒口斷裂運(yùn)動(dòng),提出力學(xué)模型。以上兩點(diǎn)為機(jī)構(gòu)的設(shè)計(jì)提供依據(jù)。結(jié)合冒口實(shí)際尺寸和實(shí)際的冒口斷裂運(yùn)動(dòng),提出本機(jī)構(gòu)的工作流程,如圖4所示。工作流程以炸藥熔摸鑄件為核心,實(shí)際動(dòng)作時(shí)將其固定不動(dòng),保證安全。第二步夾持冒口,避免敲擊斷裂后,冒口掉在地上發(fā)生危險(xiǎn)。第三步提供敲擊作用,要求一次敲斷,但是可能需要二次敲擊。工作流程,如圖4所示。
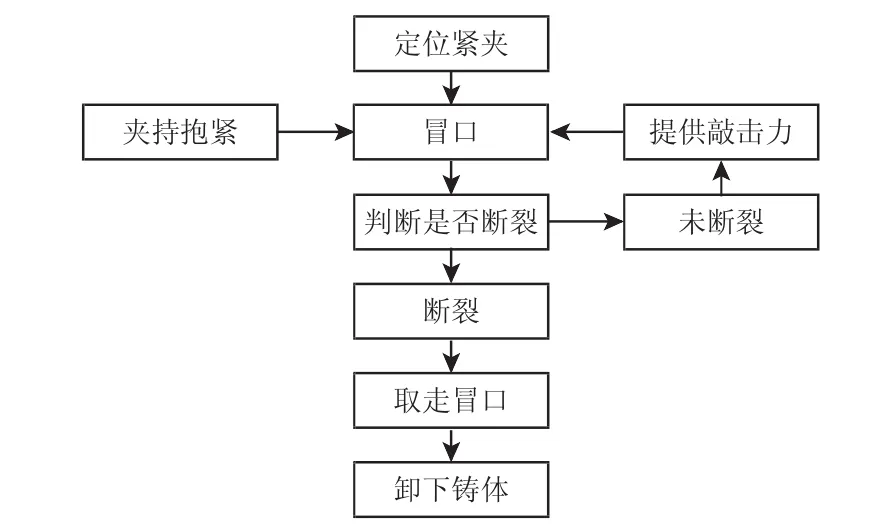
圖4 工作流程圖Fig.4 Work Flow Chart
3.3 機(jī)構(gòu)的組成
根據(jù)文獻(xiàn)[10]的指導(dǎo),機(jī)構(gòu)采用自動(dòng)敲擊方案,使用沖擊氣缸敲擊。依據(jù)熔模鑄件的特殊要求,以及冒口斷裂的最優(yōu)施力方式對(duì)機(jī)構(gòu)進(jìn)行設(shè)計(jì)。工作過(guò)程:首先把熔模鑄件裝夾在裝夾臺(tái)上(工作流程圖4)。第二步機(jī)械爪手夾持冒口,機(jī)械抓手對(duì)冒口有豎直向上的預(yù)緊力,該力的大小能使冒口在斷裂之后冒口與鑄件快速分離,避免冒口與鑄件碰撞。最后一步敲擊,通過(guò)氣泵提供氣源,氣動(dòng)控制回路控制氣缸的沖擊和回收。以面分別介紹各個(gè)機(jī)構(gòu)的組成及原理,如圖5所示。
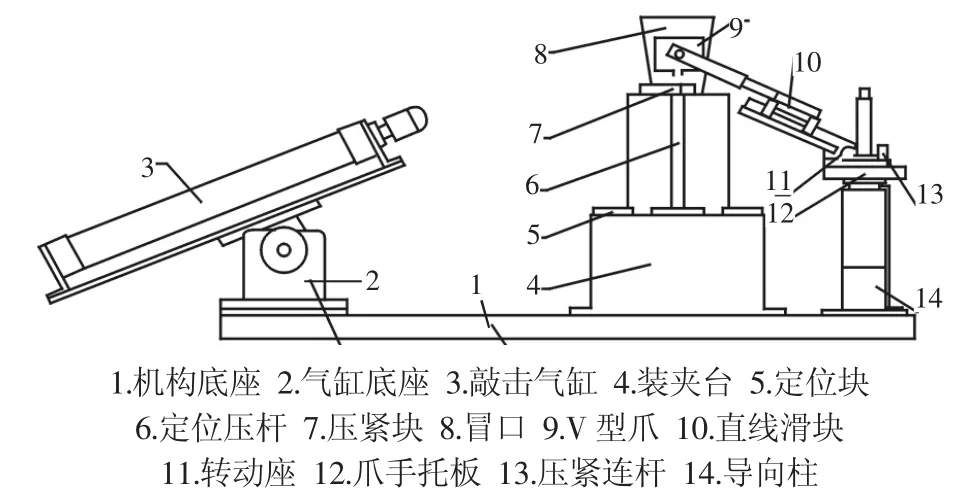
圖5 整體裝配圖Fig.5 Assembly Diagram
3.3.1 操作臺(tái)
操作臺(tái)由機(jī)構(gòu)底座1和鑄件裝夾臺(tái)4組成。機(jī)構(gòu)底座1同時(shí)也是固定和裝配其他機(jī)構(gòu)的平臺(tái)。
3.3.2 定位裝夾機(jī)構(gòu)
定位裝夾機(jī)構(gòu)的作用是固定鑄件,保證加工精度和加工安全。機(jī)構(gòu)由裝夾臺(tái)4、定位塊5、壓緊桿6和壓緊塊7組成。
3.3.3 托舉夾持機(jī)構(gòu)
該機(jī)構(gòu)由機(jī)械抱爪9、機(jī)械爪手底座11、爪手托板12、導(dǎo)向柱14和未標(biāo)出的彈簧、抓手直線軸承及減緩器組成。機(jī)構(gòu)有兩個(gè)動(dòng)作:一個(gè)是彈簧作用于導(dǎo)向直線軸承上,推動(dòng)托舉板連同抱緊冒口的機(jī)械抓手沿著導(dǎo)向柱向上運(yùn)動(dòng)。該運(yùn)動(dòng)保證冒口快速向上運(yùn)動(dòng),使其與鑄件快速分離;另一個(gè)動(dòng)作是夾持冒口8的機(jī)械爪10,當(dāng)冒口8被敲斷,機(jī)械爪10及其夾持的冒口將圍繞機(jī)械抓手底座11轉(zhuǎn)動(dòng)。冒口8斷裂后快速轉(zhuǎn)動(dòng),與鑄件分離,使得冒口與鑄件沒(méi)有摩擦或二次相撞。減緩器限定了抓手的轉(zhuǎn)動(dòng)角度,避免由于轉(zhuǎn)動(dòng)角度過(guò)大炸藥從冒口中灑出。這兩個(gè)運(yùn)動(dòng)的合運(yùn)動(dòng)是不規(guī)則的圓周曲線運(yùn)動(dòng),與冒口的斷裂不規(guī)則相吻合。
3.3.4 敲擊機(jī)構(gòu)
氣缸敲擊由氣缸3、氣缸調(diào)角底座2和氣動(dòng)系統(tǒng)組成。通過(guò)氣缸底座2可以調(diào)整氣缸3與底座1的夾角,即可以調(diào)整不同氣缸敲擊角度,從而得到不同的敲擊效果。機(jī)構(gòu)的整體結(jié)構(gòu)是擬合冒口斷裂運(yùn)動(dòng)而設(shè)計(jì)。從前面的分析,我們已經(jīng)知道冒口的斷裂是不規(guī)則的圓周曲線運(yùn)動(dòng)。如果輔助的設(shè)計(jì)的機(jī)構(gòu)的運(yùn)動(dòng)模型與冒口的斷裂運(yùn)動(dòng)形式不耦合,那么附加機(jī)構(gòu)將會(huì)產(chǎn)生附加剛度,干涉冒口的斷裂運(yùn)動(dòng)。因此,設(shè)計(jì)的機(jī)構(gòu)機(jī)械手具有豎直向上的運(yùn)動(dòng)和一個(gè)旋轉(zhuǎn)運(yùn)動(dòng)。豎直向上運(yùn)動(dòng)是由彈簧提供的隨機(jī)彈力,及旋轉(zhuǎn)運(yùn)動(dòng),他們的和運(yùn)動(dòng)是不規(guī)則的圓周曲線運(yùn)動(dòng),與冒口的斷裂運(yùn)動(dòng)耦合。同時(shí)機(jī)械手的設(shè)計(jì)又減小了由于冒口斷裂時(shí),冒口對(duì)鑄體的擠壓力,提供了足夠的使用安全。
4 實(shí)驗(yàn)結(jié)果分析
冒口自動(dòng)去除機(jī)構(gòu)加工裝配完成后,對(duì)其進(jìn)行小范圍試運(yùn)行測(cè)試:機(jī)構(gòu)無(wú)卡死、干涉現(xiàn)象,如圖6(a)所示。把機(jī)構(gòu)調(diào)試到最佳狀態(tài),并且調(diào)試好其余設(shè)備(如氣動(dòng)系統(tǒng)、傳感器和采集儀等),然后進(jìn)行試驗(yàn)。實(shí)驗(yàn)效果,如圖6(b)所示。

圖6 實(shí)物圖Fig.6 Picture of Real Products
機(jī)構(gòu)采用S型力傳感器,其一端裝于氣缸推桿頭部,另一端裝有尼龍敲擊頭,如圖6(a)所示。使用東方所的DASP采集儀采集力的大小,得到的時(shí)域波形,如圖7所示。反復(fù)多次試驗(yàn),本機(jī)構(gòu)能夠穩(wěn)定運(yùn)行。圖7是試驗(yàn)中的一個(gè)案例,該圖是敲擊力時(shí)域波形圖,采集到的力的大小是F1=601N。對(duì)該力分解,即F水平方向=Fcosθ,θ∈[15°,30°]。把力代入上式得 F水平方向=560N,由前面的理論計(jì)算可知,斷裂最小力 F許用=478N。從而有F水平方向>F允許,滿足設(shè)計(jì)要求,并且獲得斷裂質(zhì)量較好的斷裂冒口。

圖7 時(shí)域波形圖Fig.7 Time Domain Waveform Figure
5 總結(jié)
運(yùn)用斷裂力學(xué)研究冒口的斷裂特性,結(jié)合實(shí)際冒口的尺寸計(jì)算出斷裂的最小力。運(yùn)用ANSYS仿真驗(yàn)證了斷裂力的有效性。由于冒口的斷裂的不確定特性,所以斷裂后的冒口運(yùn)動(dòng)是不確定性曲線運(yùn)動(dòng)。利用計(jì)算結(jié)果與斷裂運(yùn)動(dòng)特性,設(shè)計(jì)冒口自動(dòng)去除機(jī)構(gòu)。經(jīng)過(guò)多次實(shí)驗(yàn)并且反復(fù)優(yōu)化改進(jìn)了機(jī)構(gòu)。最后實(shí)驗(yàn)證實(shí)了機(jī)構(gòu)具有良好的效果,以及理論分析的有效性,并獲得良好的冒口斷裂面。可見(jiàn)本機(jī)構(gòu)的設(shè)計(jì)是合理有效的。
[1]彭規(guī)錦.切割澆冒口的帶鋸機(jī)[J].鑄造機(jī)械.沈陽(yáng)制造廠,1985(6):62-62.(Peng Gui-jing.Poured riser cutting band saw[J].Casting Machinery,Shenyang Factory,1985(6):62-62.)
[2]張成哲.液控多向氣動(dòng)錘[J].金屬加工:熱加工,沈陽(yáng)制造廠,1992(5):48.(Zhang Cheng-zhe.Hydraulic control multi-way pneumatichammer[J].Metal Processing:Hot Working,Shenyang Factory,1992(5):48.)
[3]劉小龍.現(xiàn)代鑄件清理方式[J].鑄造設(shè)備與工藝,2011(4):6-7.(Liu Xiao-long.The modern casting cleaning method[J].Foundry Equipment and Technology,2011(4):6-7.)
[4]伍穎.斷裂與疲勞[M].武漢:中國(guó)地質(zhì)大學(xué)出版社,2008(10).(Wu Ying.The Fracture and Fatigue[M].Wuhan:China University of Geosciences Press,2008(10).)
[5]羅運(yùn)軍,胡國(guó)勝,張麗華.多基發(fā)射藥的沖擊斷裂能和沖擊破壞機(jī)理[J].太原機(jī)械學(xué)院學(xué)報(bào),1992,38(2):147-154.(Luo Yun-jun,Hu Guo-sheng,Zhang Li-hua.The impact fracture energy and the impact fracture mechanism in multiple-base propellants[J].Journal of Taiyuan Institute of Machinery,1992,38(2):147-154.)
[6]孫訓(xùn)方,方孝淑,材料力學(xué)[M].第 4版.北京:高等教育出版社,2006(6).(Sun Xun-fang,F(xiàn)ang Xiao-shu.Mechanics of Materials[M].Ver.4.Beijing:Highereducation Press,2006(6).)
[7]何柏林,王斌.疲勞失效預(yù)測(cè)的研究現(xiàn)狀和發(fā)展趨勢(shì)[J].機(jī)械設(shè)計(jì)與制造,2012(4):279-281.(He Bo-lin,Wang Bin.Research status and development trend of fatigue failureprediction[J].MachineryDesign&Manufacture,2012(4):279-281.)
[8]王彥偉.基于有限元的疲勞分析方法及實(shí)踐[J].機(jī)械設(shè)計(jì)與制造,2008(1):22-24.(Wang Yan-wei.FEA based fatigue analys is and Its application[J].Machinery Design&Manufacture,2008(1):22-24.)
[9]任愛(ài)華.弧面分度凸輪機(jī)構(gòu)瞬態(tài)動(dòng)力學(xué)分析[J].機(jī)械設(shè)計(jì)與制造,2012(5):205-207.(Ren Ai-hua.Transient dynamic analysis of globoidal indexing cam mechanism[J].Machinery Design & Manufacture,2012(5):205-207.)
[10]孫桓.機(jī)械原理[M].第 7 版.北京:高等教育出版社,2006(5).(Sun Heng.Theory of Machines and Mechanisms[M].Ver.7.Beijing:Higher Education Press,2006(5).)
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:29:16
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
World Journal of Diabetes(2019年7期)2019-07-23 11:52:08
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報(bào)·發(fā)現(xiàn)號(hào)趣味百科(2015年12期)2016-01-25 00:41:49
