自平衡兩輪電動車控制系統仿真研究
2018-03-05 12:32:17姚尚明
機械設計與制造 2018年2期
姚尚明,童 亮,杜 迪
(北京信息科技大學 機電工程學院,北京 100192)
1 引言
隨著汽車工業的發展,能源問題和交通問題越來越嚴重,在這樣的背景下,自平衡兩輪電動車應運而生。無刷直流電機(BLDC)由于具有體積小、高效節能、轉動慣量小、調速范圍寬、結構簡單等優點,使得其尤其適用于自平衡兩輪電動車。自平衡兩輪電動車由于具有快速的靈活性和機動性,特別在擁擠的城市中更能體現其靈活性與方便。由于其具有轉彎靈巧、無剎車系統、體積小巧等特點,這也使得自平衡兩輪車特別適用于空間狹小、地形復雜以及汽車難以通過的場合[1-3]。由于電力電子、電機控制技術以及永磁材料的發展,直流無刷電機得以快速發展。其相對于傳統的直流有刷電機,創新性的采用了電子換向器,舍棄了傳統的機械換向,從而提高了電機的效率、控制精度以及電機的使用壽命,而且普通的直流電機具有的優秀的機械品質尚存,因此大規模適用于伺服系統以及機器人等控制領域[4-6]。
國內外的許多學者都對自平衡兩輪電動車系統的平衡控制算法進行過大量的理論與實踐研究[7],比如某大學的科研人員采用了傳統的PID控制算法、某大學的科研人員采用了神經網絡PID控制算法、某大學的科研人員采用了滑模變結構算法;著名的Segway公司采用了模糊控制算法,從結果上看以上方法都對自平衡兩輪小車取得了良好的控制效果,然而不足的是,以往的研究成果中只涉及到控制算法對自平衡兩輪車機械模型的控制,但沒有將電機模型和自平衡兩輪車機械模型聯合起來。文章通過使用MATLAB軟件下的SIMULINK仿真環境搭建了自平衡兩輪車的機械模型和無刷直流電機的本體模型以及其控制系統,設計了無刷直流電機轉速和電流雙閉環控制系統,并分別采用PID和模糊控制作為系統的平衡控制算法,設計了自平衡兩輪電動車的機械模型和無刷直流電機驅動模型的聯合平衡控制系統,并對比分析了PID控制和模糊控制算法的仿真結果。并通過改變車身的質量和車身質心的高度來驗證模糊控制器的魯棒性。
2 自平衡兩輪車數學模型
2.1 速度計算
在建立系統數學模型時,使用拉格朗日方程的首要任務就是求出系統的總動能,因此求得自平衡兩輪車運動時的所有方向上的速度變的刻不容緩。自平衡兩輪車的機械結構與受力分析,如圖1所示。
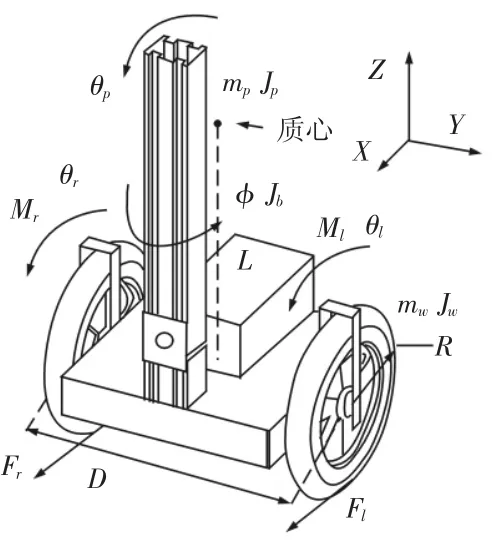
圖1 自平衡兩輪車機械結構與受力分析Fig.1 The Structure and Force Analysis of TWSBEV
很容易得到車輪的速度等于車輪角速度與車輪半徑的乘積,即:Vl=θ˙lR Vr=θ˙rR (1)
式中:Vl、Vr—左、右車輪速度;θl、θr—左、右車輪轉角;R—車輪半徑。
由車身傾斜而引起的車身速度的變化分解到X、Y、Z方向上可表示為:

式中:θp、φ—車身傾角和車身轉動角;L—車身質心到輪軸的距離。
由車身旋轉而引起的車身速度的變化分解到X、Y方向上可表示為:Vx2=-φ˙Lsinθpsinφ (5)

由車輪滾動而引起車身速度的變化分解到坐標軸可表示為:

通過左右兩車輪的角速度變換可以得到車身轉彎角:

式中:D—左、右車輪之間的間距。
2.2 能量計算
車身動能:
車輪動能:

系統總動能:T=T1+T2
式中:mp—車身質量;mw—車輪質量;Jp—車身繞輪軸的轉動慣量;Jb—車身繞z軸的轉動慣量。
2.3 應用拉格朗日方程建模
同理在θl方向上應用拉格朗日方程可以得到:

式中:Qθp、Qθl、Qθr—θp、θl、θr方向上的廣義力。
2.4 基于MATLAB的自平衡兩輪車機械系統模型
自平衡兩輪車基于MATLAB/SIMULINK的機械本體系統模型的封裝圖,如圖2所示。其中,系統的輸入為左、右兩無刷直流電機電機的輸出轉矩,輸出為左、右輪的速度和轉角以及車身的速度和傾角。

圖2 自平衡兩輪車機械模型封裝Fig.2 The Mechanical Model Mask of TWSBEV
3 無刷直流電機驅動系統建模
3.1 無刷直流電機的數學模型
3.1.1 定子電壓方程
基于一定的假設條件,下式可表示無刷直流電機的定子電壓平衡方程[8],即:

式中:ua,ub,uc;ea,eb,ec;ia,ib,ic—三相定子電壓(V)、三相定子的反
電動勢(V)、三相定子相電流(A);La,Lb,Lc—三相定子的自感
(H);Lab,Lac,Lba,Lbc,Lca,Lcb—三相定子繞組間的互感(H);Ra,
Rb,Rc—三相定子繞組的各相電阻(Ω);P—微分算子(d/dt)。
在電機360°電角度里,轉子的磁阻是不隨轉子的位置變化而變化的,這是由電機的結構決定的,假設電機三相繞組是對稱的,則:La=Lb=Lc=L,Lab=La=Lba=Lbc=Lca=Lcb=M;Ra=Rb=Rc=R。
因為無刷直流電機是三相對稱的,則ia+ib+ic=0,并且Mib+Mic=-Mia,則(16)式可以改寫為:

3.1.2電磁轉矩方程
無刷直流電機定子繞組的輸入功率與電機所產生的電磁轉矩之間的關系為:eaia+ebib+ecic=Teω (18)
式中:ω—電機的機械角速(rad/s)。
3.1.3 電機運動方程
式中:B—阻尼系數(N/m/s/rad);J—電機的轉動慣量(kg/m2);TL—負載轉矩(N/m)。
3.2 基于MATLAB的BLDC仿真模型的建立
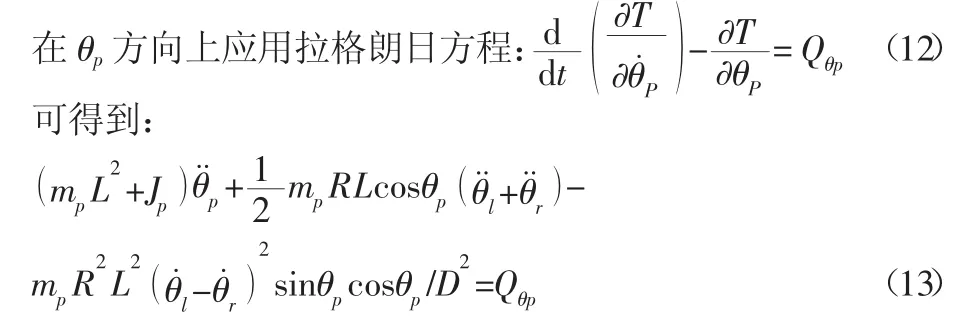
利用SIMULINK軟件里自帶的工具箱SimPowerSystems所提供的豐富的模塊庫功能,通過研究分析無刷直流電機的數學模型,建立了BLDC的驅動仿真模型。其系統設計框圖,如圖3所示。
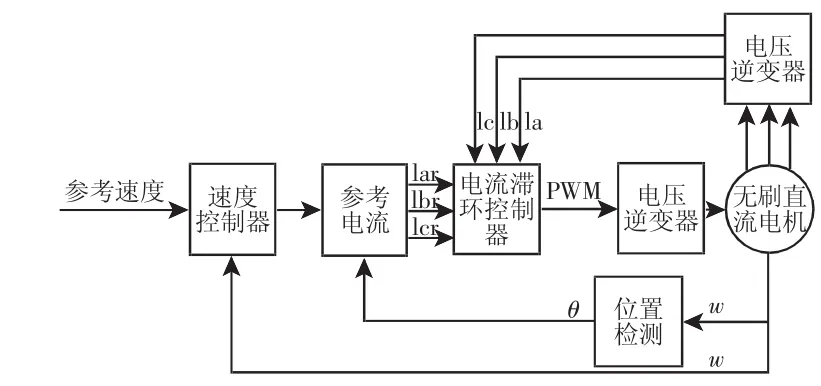
圖3 BLDC驅動系統設計框圖Fig.3 The Design Picture of BLDC Drive System
其中轉速環采用PI控制,電流環則采用滯環控制。把以上各功能模塊組合起來即可得到無刷直流電機驅動系統仿真模型。
4 自平衡兩輪車車身傾角-車輪轉速雙閉環PID控制器設計
我們知道當自平衡兩輪電動車做標準的直線運動時,因為左右兩輪同時運動而且不存在轉彎運動,因此我們可以將兩個車輪近似等效為一個車輪,這樣就大大的減小了系統的復雜程度,即可以得到將上節中建立的精確模型線性化。我們可以權且當|θp|≤10°時,sinθp≈θp、cosθp≈1,而且都可以近似等于 0,代入式(13)~式(15),可得系統的等效模型為:

將已知參數代入上式,并進行拉氏變換即可得到系統的傳

借鑒倒立擺的控制策略,自平衡兩輪電動車的內、外環反饋均可采用PD控制器。設計的自平衡兩輪電動車的控制系統,如圖4所示。
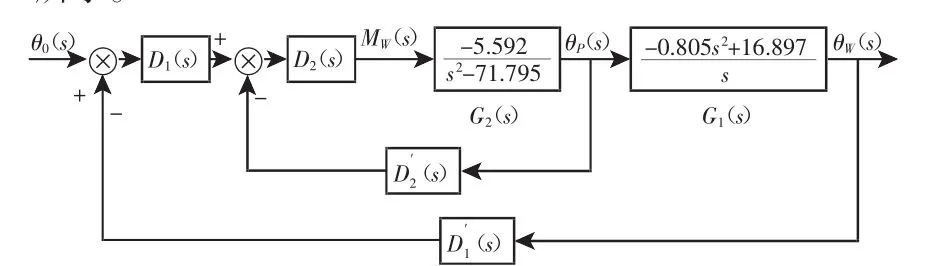
圖4 PID控制系統Fig.4 The PID Control System
自平衡兩輪電動車在運動時有兩種控制目標即車身傾角是可控的以及車輪速度是可控的,也就是車身傾角恒定以及車輪速度恒定。在自平衡兩輪車運動過程中,傾角可控是車輪速度可控的基礎,因此可以選擇車身傾角為系統的內環,而車輪轉速為系統的外環。從而可以搭建自平衡兩輪電動車系統的雙閉環PID控制原理圖。
5 自平衡兩輪車模糊控制器設計
5.1 模糊控制器簡介
模糊控制器的原理,如圖5所示。從圖5中可知模糊控制器主要由控制規則庫、模糊推論機制、模糊化模塊、解模糊模塊組成[9]。
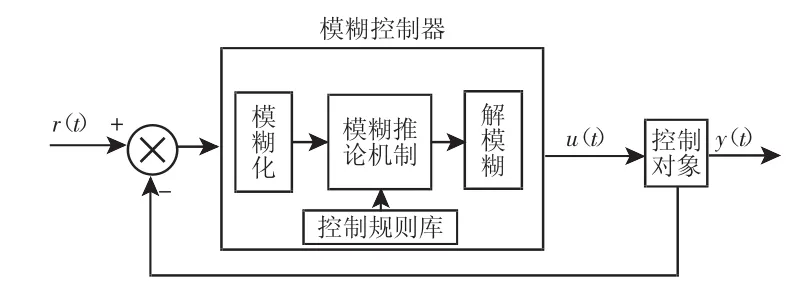
圖5 模糊控制原理圖Fig.5 The Schematic of Fuzzy Control
5.2 車身傾角模糊控制器設計
設定模糊控制器的輸入變量為車身傾角與給定值之間的偏差E和Ec,輸出變量U為無刷直流電機負載轉矩[10]。根據以往經驗,模糊控制器各變量的論域設置為:
角度偏差 E:[-0.3,0.3];
角度偏差變化率:[-1.5,1.5];
輸出轉矩:[-18,18]
制定自平衡兩輪車模糊規則,如表1所示。在上述自平衡兩輪車機械模型和無刷直流電機驅動模型的基礎上,搭建自平衡兩輪電動車系統模糊控制器原理圖(圖略)。對自平衡兩輪電動車進行仿真控制。
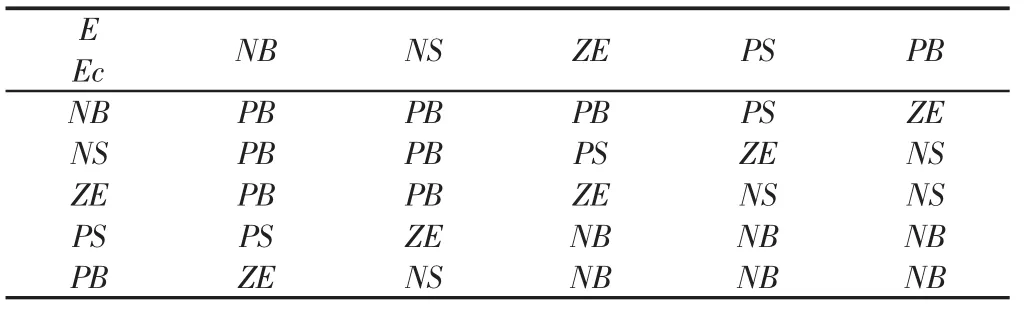
表1 模糊規則Tab.1 Rules of Fuzzy Controller
6 系統仿真分析
試驗中所需的物理參數,如表2所示。

表2 所需物理參數Tab.2 Physical Parameters
在MATLAB/SIMULINK環境下中分別建立系統的PID控制算法和模糊控制算法的仿真模型并進行仿真實驗。在自平衡兩輪車處于平衡狀態下假設給定平衡車車輪的轉速為0.5rad/s,之后觀察示波器中兩輪車系統車身傾角和車輪轉速的響應情況,其仿真的結果圖,如圖7~圖9所示;當采用模糊控制器作為自平衡兩輪車的平衡控制器時,改變車身的質量和車身質心高度,觀察系統的響應情況。

圖6 PID控制器仿真結果Fig.6 The Simulation Result of PID Controller

圖7 模糊控制器仿真結果Fig.7 The Simulation Result of Fuzzy Controller
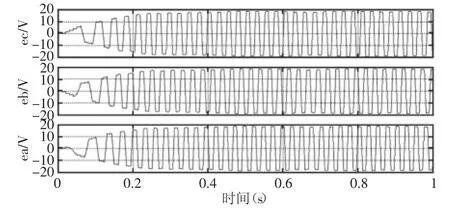
圖8 BLDC三相反電動勢波形Fig.8 The Wave Shape of Back Electromotive Force
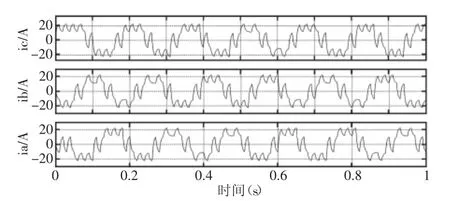
圖9 BLDC三相電流波形Fig.9 The Wave Shape of Current
從仿真結果可以得出以下結論:(1)在圖8中,當自平衡兩輪車系統采用PID控制作為系統的平衡控制算法時,自平衡兩輪車系統在10s左右可以基本恢復到平衡位置,車輪速度可以在8s左右基本跟進到給定值;而在圖9中,當采用模糊控制器作為自平衡兩輪車系統的平衡控制算法時,系統在5s左右可以恢復到平衡位置,車輪速度可以在6s左右便基本上跟進到給定值。從以上數據可以看出,當采用模糊控制器時,車身傾角和車輪轉速這兩項指標隨時間變化的響應情況都要優于轉速-電流雙閉環PID控制器,因此說明模糊控制器更加適合作為自平衡兩輪電動車系統的平衡控制算法。(2)設計的模糊控制器作為對車身質量的變化具有很好的魯棒性。分別選mp=100kg,mp=55kg,mp=25kg進行仿真實驗,車輪轉速在6s左右基本跟進到給定值;當mp=100kg時,車輪轉速的變化幅度和波動最大,mp=55kg時次之,mp=25kg最小,說明車身質量越大,車輪轉速的變化幅度和波動越大。車身傾角在5s左右基本恢復到平衡位置,而且當mp=100kg時,車身傾角的變化幅度和波動明顯大于當車身質量為55kg和25kg,說明車身質量越大,車身傾角的變化幅度和波動越大。(3)設計的模糊控制器對車身質心高度的變化具有一定的魯棒性。分別選取L=0.5m,L=0.3m,L=0.1m進行仿真實驗,車輪轉速在7s左右基本跟進到給定值;當L=0.5m時,車輪轉速的變化幅度和波動最大,L=0.3m時次之,L=0.1m時最小,說明車身質心高度越大,車輪轉速的變化幅度和波動越大。車身傾角在8s左右基本恢復到平衡位置;而且當L=0.5m時,車身傾角的變化幅度和波動最大,L=0.3m時次之,L=0.1m時最小,說明車身質心高度越高,車身傾角的變化幅度和波動越大。(4)設計的模糊控制器對車身質量與車身質心高度的變化具備一定的魯棒性。相比之下,對于車身質量的變化,系統能夠很好的適應,但對于車身質心高度的變化,系統的控制調節能力較弱,但依然能夠滿足生活中的實際需要。(5)控制系統中無刷直流電機的仿真曲線,如圖8、圖9所示。從圖中可以看出,三相反電動勢的波形基本上呈梯形波形式,電流波形基本上呈方波形式,且兩者都較為理想,說明了文中設計的直流無刷電機的驅動系統方案是可行的。
7 結束語
自平衡兩輪電動車由于具有非線性度高、欠驅動以及強耦合性等特點,因此其本身就是一種很不穩定的系統,其結構非常類似于常見的一階倒立擺系統。因此必須對其施以適當的控制算法才能使其達到平衡穩定的狀態。文中創新性的聯合了自平衡兩輪電動車機械模型和無刷直流電機(BLDC)驅動系統模型,分析比較了當PID控制算法和模糊控制算法分別作為系統控制策略時對系統的控制效果;并通過改變車身質量和車身質心高度來驗證模糊控制器的魯棒性。仿真結果表明模糊控制器更適合于自平衡兩輪電動車系統,可以對系統有很好的控制效果,而且也對系統具有很好的魯棒性,這為以后更深入的研究自平衡兩輪車系統提供了幫助。
[1]孫陽,辛頌,雷榮芳.雙輪自平衡小車的動力學建模與分析[J].硅谷,2014(5):170-171.(Sun Yang,Xin Song,Lei Rong-fang.The dynamic modeling and analysis of self-balanced two-wheeled vehicle[J].Silicon Valley,2014(5):170-171.)
[2]段其昌,翁玨,李豐兵.一種新的兩輪自平衡電動車控制方法[J].計算機應用研究,2013(12):3678-3681.(Duan Qi-Chang,Weng Jue,Li Feng-bing.Sort of novel control method for two wheels self-balancing scooter[J].Application Research of Computer,2013(12):3678-3681.)
[3]Chih-Chen Yih.Sliding-Mode Velocity Control of a Two-Wheeled Self-Balancing Vehicle[J].Asian J Control,2014(166).
[4]Ionel D M,Eastham J F,Betzer T.Finite element analysis of a novel brushless DC motor with flux barriers[J].IEEE Trans on Magnetics,1995,31(6):3749-3751.
[5]殷云華,鄭賓,鄭浩鑫.一種基于Matlab的無刷直流電機控制系統建模真方法[J].系統仿真報,2008(2):293-298.(Yin Yun-hua,Zheng Bin,Zheng Hao-xin.A method for modeling and simulation of Brushless DC motor control system based on Matlab[J].Journal of System Simulation,2008(2):293-298.)
[6]解后循,高翔,趙世婧.基于S-函數的無刷直流電機雙閉環速度控制系統仿真[J].拖拉機與農用運車,2009(1):52-55.(Xie Hou-xun,Gao Xiang,Zhao Shi-jing.Simulation of double loop control system of BLDCM based on S-Fuction[J].Tractor&Fam Transporter,2009(1):52-55.)
[7]劉二林,姜香菊.基于PD算法的兩輪自平衡車直立控制[J].自動化與儀器儀表,2015(1):203-206.(Liu Er-lin,Jiang Xiang-ju.Upright control of self-balancing two-wheeled vehicle on basis of PD control[J].Automation and Instrumentation,2015(1):203-206.)
[8]孫環陽,黃筱調,洪榮晶.永磁同步電機矢量控制系統的仿真研究[J].機械設計與制造,2010(3):122-124.(Sun Huan-yang,Huang Xiao-tiao,Hong Rong-jing.simulation research of Permanent magnet synchronous motor vector control system[J].Machinery Design&Manufature,2010(3):122-124.)
[9]肖文健,李永科.基于模糊控制的智能車系統設計[J].電子設計工程,2012(18):158-160.(Xiao Wen-jian,Li Yong-ke.Design of intelligent vehicle systems based on photoelectric sensor[J].Electronic Design Engineering,2012(18):158-160.)
[10]李明愛,焦利芳,喬俊飛.自平衡兩輪機器人的分層模糊控制[J].控制工程,2009(1):80-82+94.(Li Min-gai,Jiao Li-fang,Qiao Jun-fei.Hierarchical fuzzy control for self-balancing two-wheel robots[J].Control Engineering of China,2009(1):80-82+94.)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
