隨動轉向半掛汽車列車機動性分析
2018-03-05 12:31:54田晉躍陳治領王新成
機械設計與制造 2018年2期
田晉躍,陳治領,韓 順,王新成
(1.江蘇大學 汽車與交通工程學院,江蘇 鎮江 212013;2.鎮江寶華半掛車有限公司,江蘇 鎮江 212003)
1 引言
隨著我國高速公路建設的發展,半掛汽車列車充分發揮甩掛運輸、區段運輸和滾裝運輸的優勢,已成為我國公路物流運輸的主要形式。為提高半掛汽車列車的運輸生產率,同時滿足道路法規和軸荷要求,汽車廠家大多采用增加半掛車車軸的方法,但純粹增加半掛車剛性軸,半掛車的機動性、通過性及操縱穩定性將會降低,輪胎非正常磨損加劇[1-2]。隨動橋是提高半掛汽車列車轉向機動性和減輕輪胎磨損的一種有效技術路線,根據轉向控制原理不同,隨動橋可分為主動控制式和被動控制式兩類[3]。目前國外主要對主動式隨動橋進行研究,對于被動式隨動橋的研究較少。而國內對兩種隨動橋的轉向運動特性均缺乏相關深入的研究,國內汽車企業采用的隨動橋產品大都依靠引進國外技術。
2 隨動橋的基本結構和轉向原理
2.1 隨動橋的基本結構
德國某公司的LL系列被動式隨動橋,具有結構簡單,占用空間小,適應性強等優點,可實現最大27°轉角。該隨動橋總成主要包括軸梁、轉向節總成、轉向橫拉桿、轉向減震器、鎖止氣缸、空氣懸架和鼓式制動器等。
相對于普通半掛車剛性橋,該隨動橋的關鍵技術是轉向節總成,局部視圖,如圖1所示。包括一對波形壓力軸承,如圖2所示、軸襯、主銷和預緊彈簧等部件。上下波形壓力軸承均先通過彈性柱銷實現定位,然后分別焊接在車軸和轉向節上。主銷頂部加工一段盲孔,孔中安裝一個預緊彈簧,可確保兩個波形壓力軸承始終嚙合。其中主銷與轉向節過盈配合,主銷與車軸為間隙配合。
當半掛汽車列車倒車或高速行駛時,為保證行駛方向的穩定性,隨動橋必須被鎖止[4]。控制單元ECU接收并分析車輪輪速傳感器傳遞的信號,將控制指令傳遞給鎖止氣缸,活塞桿推動鎖止塊進入鎖止氣缸支座的卡槽中,使轉向橫拉桿鎖止。
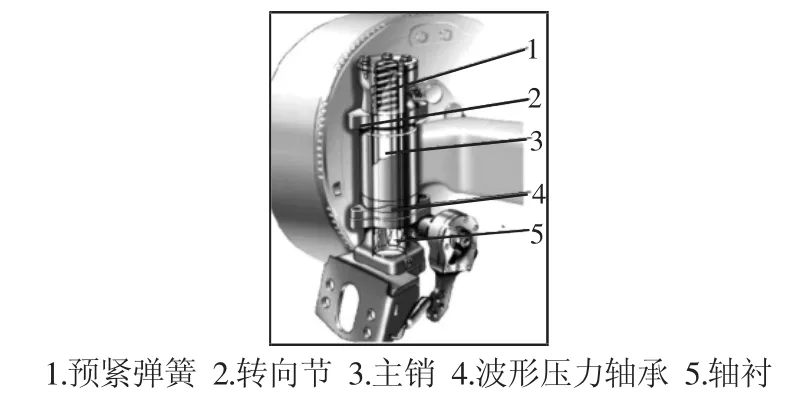
圖1 隨動橋轉向節局部圖Fig.1 The Local Image of Self-Steer Axle Knuckle

圖2 波形壓力軸承三維模型Fig.2 The 3D Model of Thrust Washers
由于不平路面或側向風的影響,車輛直線行駛時,車輪會受到來自地面的側向力的作用。為保持行駛的穩定性,隨動橋配有轉向減振器。其作用有兩方面,第一是作為穩定裝置,衰減車輪的抖動;第二由于減震器阻尼的存在,會產生一個穩定力矩,當轉向力矩小于穩定力矩,可以使車輪及時回正[5]。
2.2 隨動橋的轉向原理
隨動橋和前橋一樣,具有相應的車輪定位參數,最關鍵的是主銷后傾角,若主銷后傾角較小,則轉向主力矩會無法克服摩擦阻力矩,使得隨動橋轉向困難,轉向靈敏度降低;過大的主銷后傾角將產生較大的轉向力矩,使其在恢復直線行駛時回正困難,通常主銷后傾角取為8°。
假設隨動轉向半掛汽車列車在行駛過程中,前轉向橋向左轉向,如圖3所示。駕駛員操縱轉向盤使前橋車輪向左轉過一定角度,為保證前橋和隨動橋的瞬時轉向軸線相交同一點O,半掛車第三軸車輪應向右轉過一定角度。車輪轉向時產生繞瞬時轉向中心O的離心力,其方向指向外側車輪,同時在地面與車輪的接觸點會產生作用于車輪的側向反力,與離心力大小相等,方向相反。由于主銷向后傾斜,側向反力與主銷軸線會存在力臂,故側向反力可使車輪繞主銷轉動。當轉向力矩克服波形壓力軸承摩擦阻力矩和輪胎摩擦阻力矩后,波形壓力軸承與間發生錯動,車輪會繞主銷轉動。當車輛恢復直線行駛時,車輪受到的側向反力消失,下波形壓力軸承在車輛重力作用下恢復到直線行駛對應的位置,配對波形壓力軸承再次保持緊密嚙合狀態[6]。
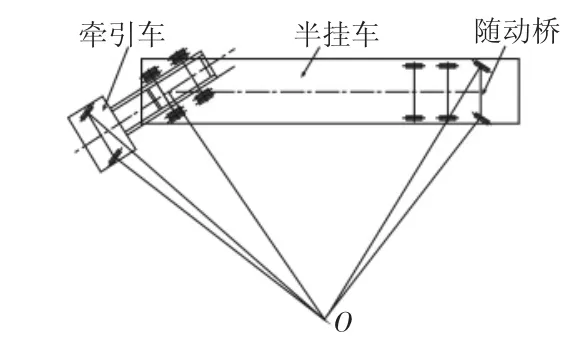
圖3 隨動轉向半掛汽車列車轉向示意圖Fig.3 Turning Diagram of Self-Steering Semi-Trailer Truck
3 整車模型的搭建
根據半掛汽車列車的結構和參數,在ADAMS/Car中建立動力傳動系統、循環球式轉向系統、駕駛室、前懸架、牽引車導向桿式平衡懸架、隨動轉向半掛車平衡懸架和普通半掛車平衡懸架等模型。鋼板彈簧均采用間接離散梁法構建,輪胎模型采用FTire模型。半掛車和牽引車通過牽引座連接,在牽引車車架模型中建立相應的牽引座部件。
根據建立的隨動橋總成三維模型,建立其虛擬樣機模型。為模擬波形壓力軸承間的摩擦,建立一個基于運動副的運動制動器,其作用于轉向節和車軸間的旋轉副。由于半掛車的第三軸輪胎磨損最為嚴重,應優先改善半掛車第三軸質心對牽引座中心的軌跡跟隨性,減輕轉向過程中輪胎的側滑,如圖4所示。將普通三軸半掛車的第三軸設計為隨動橋。

圖4 隨動轉向半掛車懸架模型Fig.4 Suspension Model of Self-Steering Semi-Trailer
在Adams/Car標準模式下,將建立各個子系統和整車試驗臺進行裝配,分別建立普通半掛汽車列車和隨動轉向半掛汽車列車整車模型(俯視圖隱藏半掛車幾何體),如圖5、圖6所示。
圖5 普通半掛汽車列車整車模型俯視圖Fig.5 Plan View of Common Semi-Trailer Truck

圖6 隨動轉向半掛汽車列車整車模型俯視圖Fig.6 Plan View of Self-Steering Semi-Trailer Truck
4 仿真結果與分析
參考國內外半掛汽車列車低速機動性仿真試驗和樣車試驗相關文獻,對建立的兩個整車模型進行滿載低速轉向機動性分析,包括低速360°轉彎和角階躍轉向試驗。由當車速超過35km/h時,鎖止機構會將轉向橫拉桿鎖住,故僅考慮低速10km/h。
4.1 低速360°轉彎
對于低速360°轉彎試驗,不同國家要求半掛汽車列車滿足的通道圓的內外徑不同,且不同標準采用的最低行駛車速不同[7-9]。主要研究隨動橋和剛性橋對半掛汽車列車的機動性影響,對于路徑和車速可以根據軟件要求和車型選擇,通過修改Adams/Car共享數據庫中現有的駕駛員控制文件和駕駛員控制參數文件,建立行駛軌跡和設置仿真車速。
通過取曲線若干數據點,利用作圖法,如圖7、圖8所示。可求普通半掛汽車列車的偏移距為1295mm,隨動轉向半掛汽車列車的偏移距為1110mm,偏移距約減少14.3%。同理可作牽引車前橋外輪和半掛車第三軸內輪的運動軌跡,可求普通半掛汽車列車的通過寬度為3801mm,隨動轉向半掛汽車列車的通過寬度為3516mm,故通過寬度約減小7.5%,即隨動橋減小了半掛汽車列車360°轉彎所需場地,提高了半掛汽車列車的機動性。
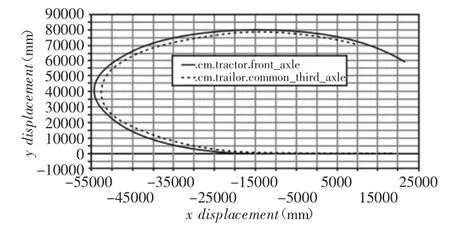
圖7 普通半掛汽車列車前橋和半掛車第三軸質心軌跡Fig.7 CG Path of Front Axle and Trailer Third Axle of Common Semi-Trailer Truck
在360°轉彎試驗中,折疊角從第5.3s開始增加,25s左右達到穩定狀態,普通半掛汽車列車的穩定折疊角為14.7°,隨動轉向半掛汽車列車的穩定折疊角為12.7°,折疊角約減小13.6%,如圖9所示。故隨動轉向半掛車行駛軌跡更靠近牽引車的軌跡,其第三軸向轉向內側的側滑較小,質心軌跡與牽引車軌跡重合度更高。
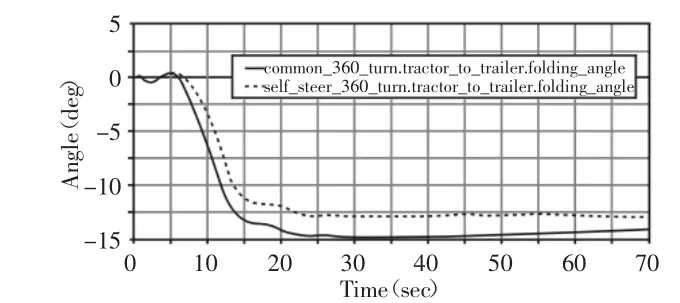
圖9 360°轉彎半掛汽車列車折疊角變化Fig.9 Folding Angle Change of Semi-Trailer Truck in 360°Turning
4.2 低速角階躍轉向
360°轉向為定路徑試驗,為評價半掛汽車列車的瞬態和穩態響應特性,國內外學者常進行低速角階躍轉向運動仿真[10]。仿真設置如下:在(2~2.4)s轉向盤轉角從 0°階躍至 100°,仿真時間為20s,固定轉向盤至仿真結束,如圖10、圖11所示。
由圖10和圖11可知,隨動轉向半掛車第三軸質心與牽引車牽引座中心軌跡偏差最大值為814 mm,普通半掛車第三軸質心與第五輪中心軌跡偏差最大值為984 mm,軌跡偏差最大值約減小17.3%,故安裝隨動轉向橋后,半掛車第三軸的跟隨性能得到明顯改善。安裝隨動橋后半掛車的橫擺角速度穩定值較小,表明隨動轉向半掛車的穩定轉彎半徑大,如圖12所示。半掛車向轉向內側偏移量較小,隨動橋質心的軌跡更接近牽引座中心軌跡。
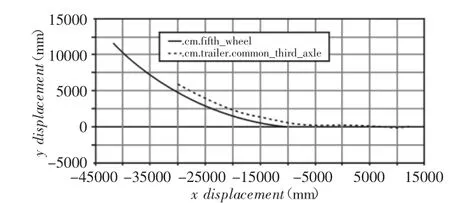
圖10 角階躍轉向普通半掛汽車列車跟隨軌跡Fig.10 Path-Following of Common Semi-Trailer Truck in Step Turning Test

圖11 角階躍轉向隨動轉向半掛汽車列車跟隨軌跡Fig.11 Path-Following of Self-Steering Semi-Trailer Truck in Step Turning Test
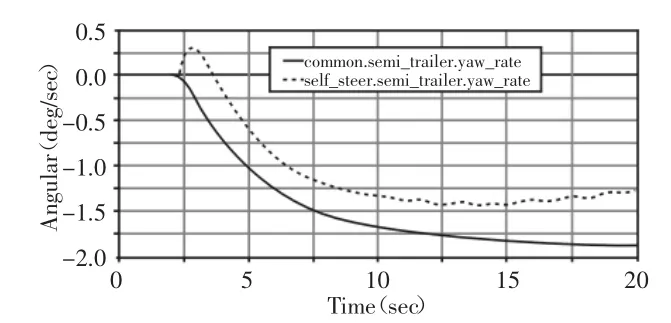
圖12 普通半掛車和隨動轉向半掛車的橫擺角速度響應Fig.12 The Yaw Rate of Common Semi-Trailer and Self-Steering Semi-Trailer
在角階躍轉向開始時,隨動橋的運動軌跡相對零線略向外偏移,偏移量最大值約為40 mm,如圖13所示。偏移量較小,不會對整車的機動性造成過多影響,隨動轉向半掛汽車列車會逐漸進入等速圓周行駛。

圖13 隨動橋初始軌跡偏移局部放大圖Fig.13 The Local Image of Trajectory Outward of Self-Steering Axle
5 結論
利用Adams/Car模塊分別建立了普通半掛汽車列車和隨動轉向半掛汽車列車整車模型,選取半掛車第三軸質心和牽引座中心作為軌跡跟隨目標,轉向仿真試驗表明:(1)在360°定路徑轉向運動中,安裝隨動橋后,半掛汽車列車的偏移距、通過寬度和折疊角分別減小了14.3%,7.5%和13.6%,即隨動橋減小了半掛車向牽引車轉向內側的偏移量,減輕了輪胎側滑引起的非正常磨損,同時減小了半掛汽車列車轉彎所需場地尺寸。(2)角階躍轉向試驗中,當牽引車前橋轉向時,隨動橋車輪在地面反作用力的激勵下實現轉向運動,隨動轉向半掛汽車列車軌跡偏差值最大值約減小17.3%,故隨動橋可顯著提高了半掛車第三軸的跟隨性能。雖然隨動橋在初始轉向時刻有向外運動的趨勢,但其軌跡偏移量較小。
[1]韓厚祿.三軸半掛車轉向協調性及隨動轉向橋結構原理研究[D].武漢:武漢理工大學,2009:1-2.(Han Hou-lv.Research on the turning traits of three-axles semi-trailer and the structure principle of self-steering axle[D].Wuhan:Wuhan University of Technology,2009:1-2.)
[2]韋超毅,李貝,謝美芝.半掛汽車列車操縱穩定性仿真研究[J].機械設計與制造,2011(10):129-131.(Wei Chao-yi,Li Bei,Xie Mei-zhi.Simulation research on handling stability of tractor-semitrailer[J].Machinery Design&Manufacture,2011(10):129-131.)
[3]錢曉東,孫榮軍,沈國華.13.7m客車幾種隨動橋轉向結構初探[J].客車技術與研究,2006(5):23-24.(Qian Xiao-dong,Sun Rong-jun,Shen Guo-hua.Research on several steering structure of 13.7m bus self-steering axle[J].Bus Technology and Research,2006(5):23-24.)
[4]Sina A M.Modeling,Simulation and active control of tractor semi-trailer combinations[D].Turkey Ankara:Middle East Technical University,2015:11-13.
[5]李玉寶.隨動轉向軸在多軸半掛車上的應用[J].專用車輛,2005(3):35-36.(Li Yu-bao.Application of self-steering axle in multi-axis trailer[J].Special Vehicle,2005(3):35-36.)
[6]季慎卿.三軸單機客車隨動轉向橋的關鍵技術.城市公共交通[J].2012(2):31-33.(Ji Shen-qing.The key technologies of triple-axles single passenger car with self-steering axle[J].Urban Public Transportation,2012(2):31-33.)
[7]鞏建坡.多軸車輛全輪轉向仿真分析與實驗驗證[D].山東:山東理工大學,2012:51-52.(Gong Jian-po.Simulation analysis and experiment verification of full wheel steering for multi-axis vehicle[D].Shandong:Shandong University of Science,2012:51-52.)
[8]許言,劉宏飛,任有.半掛汽車列車彎路行駛軌跡分析[J].長春理工大學學報,2008,31(1):132-134(Xu Yan,Liu Hong-fei,Ren You.Analysis on the trajectory of the tractorsemitrailer in crook circumstance[J].Journal of Changchun University of Science and Technology,2008,31(1):132-134.
[9]Islam M M.Design synthesis of articulated heavy vehicles with active trailer steering systems[D].Canada:University of Ontario Institute of Technology,2010:62-65.
[10]王樹鳳,郝秀成,柴山.五軸轉向重型汽車轉向性能的研究[J].汽車工程,2008,30(2):167-169.(Wang Shu-feng,Hao Xiu-cheng,Chai Shan.A study on steering performance of five-axle heavy-duty vehicle[J].Automotive Engineering,2008,30(2):167-169.)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
核科學與工程(2015年4期)2015-09-26 11:59:03
決策探索(2014年21期)2014-11-25 12:29:50
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
