船舶合攏管機器人法蘭校準系統(tǒng)設(shè)計
2018-03-05 06:15:15秦嘉岷
造船技術(shù) 2018年1期
秦嘉岷, 梁 偉, 袁 琛
(上海船舶工藝研究所, 上海 200032)
0 引 言
我國造船企業(yè)經(jīng)過多年持續(xù)改進,各骨干企業(yè)的精度控制技術(shù)及數(shù)字化智能建造技術(shù)不斷提高,但在船體分段或總段合龍時由于積累誤差及建造精度的問題,大量合攏管無法按設(shè)計圖紙正確安裝,只能采用在現(xiàn)場制作模板或現(xiàn)場修割的傳統(tǒng)制作方法。這種制作方法工藝落后、效率低下、浪費材料并存在現(xiàn)場施工時具有不安全因素等問題。一般如按萬噸級以上船舶統(tǒng)計,在合攏管制作上通常消耗角鋼500余根(每根長6 m)、焊條2 000余根、砂輪片300余張。打樣件在船廠堆積如山,占用大量的場地資源,同時消耗大量的工時和動力能源,為船舶建造增加很大的物力和人力成本[1]。隨著測量技術(shù)、軟件開發(fā)技術(shù)的進步,船廠、學(xué)校、研究所等已經(jīng)開發(fā)多型合攏管測量裝置, 基本實現(xiàn)合攏管現(xiàn)場快速測量及出圖的需要。由于管子在車間彎制、焊接加工、法蘭校準時存在人工操作誤差,難以保證人工所加工的合攏管一次安裝成功,因此需要在車間內(nèi)場預(yù)先再現(xiàn)校準,后再上船安裝。傳統(tǒng)現(xiàn)場修割校準方法、再現(xiàn)機校準方法都具有一定局限性。通過深入研究,設(shè)計提出一種新型法蘭校準系統(tǒng)——機器人法蘭校準系統(tǒng),該系統(tǒng)能達到適用任何合攏管管形、節(jié)約材料、減少工時、提高精度、降低能耗等目的。
1 典型合攏管法蘭校準方法概述
1.1 傳統(tǒng)合攏管法蘭校準方法
國內(nèi)現(xiàn)有的大部分船廠,包括國內(nèi)的一些主流船廠在船舶合攏管制造中還是沿用了傳統(tǒng)的制作工藝,應(yīng)用輔料上船現(xiàn)場制作模板,再下船依照模板測量、繪制管子制造圖,按模板進行法蘭校準,完工后再上船安裝(見圖1);或采用現(xiàn)場修割制作,即管子加工車間按預(yù)先設(shè)計部門提供的制作管子圖加工,隨后再上船對管子現(xiàn)場修割、點焊,下船焊接完工后再上船安裝。以上2種方法均須二上一下3次吊運,且第1種方法浪費了大量制作模板的材料,第2種方法對已經(jīng)制作的管子須要重新現(xiàn)場修割返工,浪費大量的人力資源,并存在著現(xiàn)場施工時具有不安全因素的問題,特別在對大口徑的合攏管在現(xiàn)場修割加工時,還需占用大量的堆放場地。

圖1 現(xiàn)場制作的合攏管模板圖
1.2 合攏管再現(xiàn)機校準方法
除采用傳統(tǒng)制作方法外,韓國KBUMHWA CORP公司以2臺數(shù)字控制變位機為主機,研制合攏管的再現(xiàn)機,并有部分船廠正在嘗試應(yīng)用通過專用測量儀器進行合攏管現(xiàn)場測量后,在車間內(nèi)場應(yīng)用測量得到數(shù)據(jù)進行分析,再通過上述的再現(xiàn)機制作完成上船安裝。這個方法改進了合攏管傳統(tǒng)的校準工藝,使合攏管制作后能一次安裝成功。但這套裝置較適合大管徑的合攏管校準(見圖2),實際應(yīng)用時存在一定的局限性。

圖2 韓國KBUMHWA CORP研制的合攏管再現(xiàn)機
為改變落后的傳統(tǒng)工藝,提高合攏管再現(xiàn)機校準等方法,實現(xiàn)短時、精準、更加靈活的作業(yè),本文設(shè)計提出一種新型法蘭校準系統(tǒng),力爭做到省時、省力、省料,適用任何合攏管管形、符合綠色造船要求,提高生產(chǎn)效率和經(jīng)濟效益。
2 機器人法蘭校準系統(tǒng)設(shè)計方案
2.1 總體思路
一般情況合攏管校準裝置須由2個法蘭(A法蘭和B法蘭)模擬實船空間位置。本文將A法蘭固定在固定架上,其中的一個螺孔按設(shè)定的位置固定,B法蘭固定在機械手上并隨機械手臂移動,系統(tǒng)讀取、計算實船合攏管空間A,B法蘭相對位置,然后機械手將B法蘭移動至指定的空間位置,從而實現(xiàn)合攏管校準。總體設(shè)計思路如圖3所示。
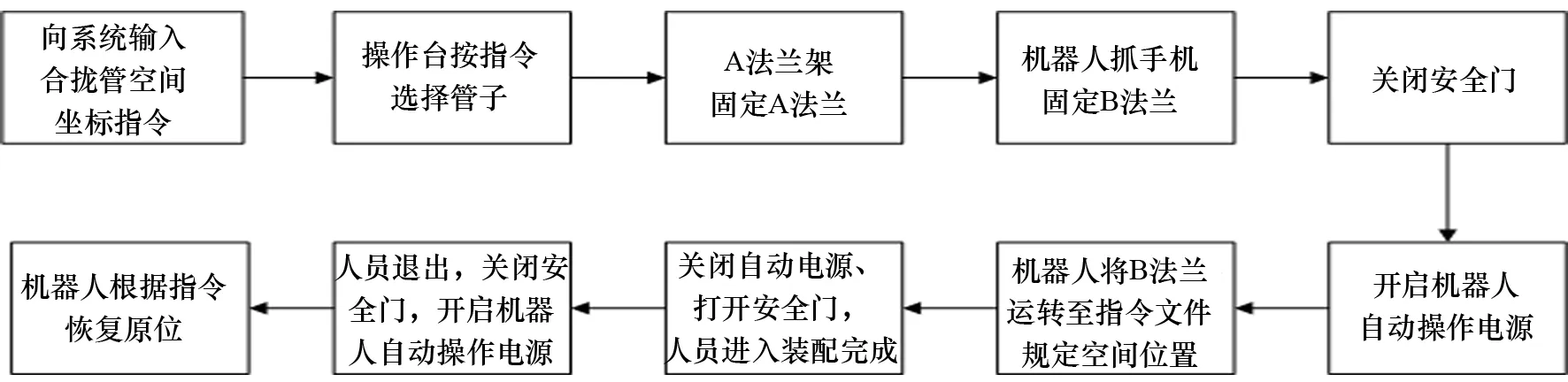
圖3 總體設(shè)計思路
2.2 設(shè)計原理
本系統(tǒng)設(shè)置有多個坐標系,主要為:全局參考坐標系、工具坐標系、用戶坐標系,設(shè)計中需要解決坐標系及坐標轉(zhuǎn)換問題。設(shè)定固定的機器人第1軸坐標系為全局參考坐標系,用x,y,z軸表示全局參考坐標系Sx,y,z;設(shè)定運動的機器人第6軸坐標系(或B法蘭中心坐標系)為相對于參考坐標系的一個工具坐標系,用n,o,a軸表示工具坐標系En,o,a[2]。設(shè)定固定的A法蘭中心坐標系為相對于參考坐標系的一個用戶固定坐標系,用l,h,c軸表示用戶坐標系Ul,h,c。上述3個坐標系關(guān)系如圖4所示。
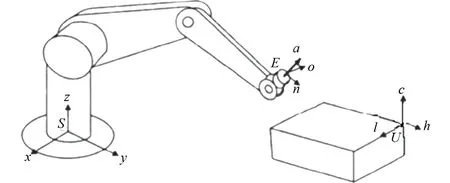
圖4 參考坐標系、工具坐標系、用戶坐標系示例
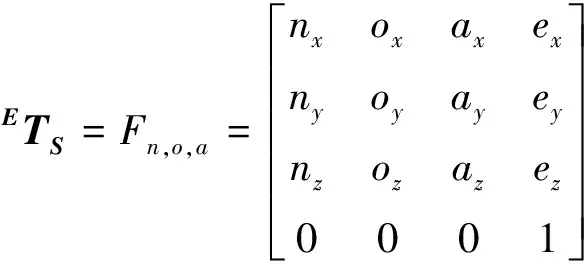
全局參考坐標系Sx,y,z位置固定,系統(tǒng)中A法蘭端固定架位置也固定,所以用戶坐標系U對參考坐標系S的轉(zhuǎn)換矩陣UTS為已知;根據(jù)測量裝置導(dǎo)入的合攏管兩端法蘭中心位置數(shù)據(jù),同樣可知工具坐標系E對用戶坐標系U的轉(zhuǎn)換矩陣ETU。這樣可求出工具坐標系E對參考坐標系S的轉(zhuǎn)換矩陣為ETS為
ETS=ETU×UTS
(1)
其中:
(2)
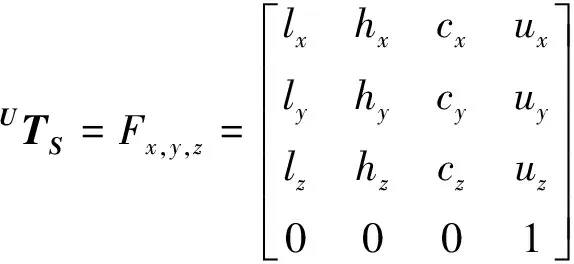
(3)
(4)
即
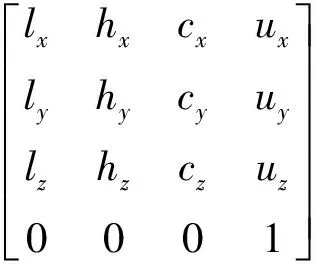
(5)
根據(jù)機器人的逆運動學(xué)方程,可求得機器人6軸參數(shù),以此控制機器人將B端法蘭放置在正確的位置[3]。
2.3 系統(tǒng)組成及技術(shù)指標
設(shè)計的機器人法蘭校準系統(tǒng)由機器臂、機器臂端口的B法蘭夾具、A法蘭固定夾具、機器人控制柜、機器人操控臺、安全欄及報警系統(tǒng)等軟、硬件組成(見圖5)。該系統(tǒng)設(shè)計最大校準管徑為DN 400 mm,能夠滿足目前船廠在船舶建造中常規(guī)應(yīng)用的管徑使用要求。
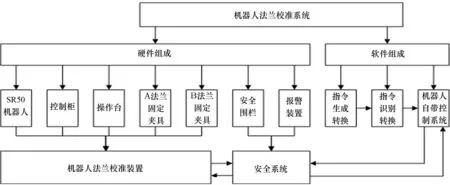
圖5 機器人法蘭校準系統(tǒng)組成
主要技術(shù)指標如下:
(1) 系統(tǒng)設(shè)計采用6軸機器人。船舶建造中的合攏管,按管子工藝要求,合攏管一般是不超過2個彎的管型,合理地布置6軸機器人完全能滿足合攏管的空間坐標位置。
(2) 機器人運載負荷為50 kg,滿足DN 400的合攏管校準,根據(jù)不同的需求,同樣可以采用更大的運載負荷。
(3) 機器人系統(tǒng)手臂運行范圍滿足(相對A坐標):沿x軸方向運行為1 200 mm,沿y軸方向運行為1 200 mm,沿z軸方向運行為2 000 mm的活動范圍。按工藝要求的規(guī)定,在一般情況下合攏管的管段長度在2 000 mm以內(nèi),原則上A法蘭與B法蘭的法蘭中心點距離不超過2 000 mm,所以機器人手臂的運行范圍能滿足管子的校準要求。
(4) 機器人系統(tǒng)運行精度:長度誤差≤1 mm/m;螺孔旋轉(zhuǎn)角度誤差≤0.2°,精度滿足行業(yè)工藝要求。
(5) 數(shù)據(jù)庫格式為SQ LiteStudio,系統(tǒng)包含了管子附件標準庫、管子坐標圖形等數(shù)據(jù)庫。
(6) 系統(tǒng)運行符合機器人的安全條例及合攏管裝配的安全操作規(guī)程。
2.4 系統(tǒng)軟件實現(xiàn)
軟件應(yīng)用C#語言開發(fā)編程,指令數(shù)據(jù)存儲在SQ LiteStudio格式的數(shù)據(jù)庫中,由機器人系統(tǒng)自動讀取識別,并按指令數(shù)據(jù)要求運動到位(見圖6)。同時,在系統(tǒng)中建立管子標準數(shù)據(jù)庫系統(tǒng),包括所有常用管徑類型、標準法蘭等信息,可實現(xiàn)多組測量數(shù)據(jù)存儲、工作清單等功能。
3 樣機及試用效果
3.1 樣機制造
機器人法蘭校準系統(tǒng)樣機主要部件機器人選用國產(chǎn)SR50B機器人,系統(tǒng)場地占地面積為4 000 mm×5 000 mm (見圖6)。該樣機現(xiàn)由上海船舶工藝研究所開發(fā)集成,在廣州某船廠的管子車間進行組裝、調(diào)試以及實船應(yīng)用。

圖6 機器人法蘭校準系統(tǒng)樣機
3.2 樣機車間調(diào)試
機器人法蘭校準系統(tǒng)樣機安裝完畢,分3步進行調(diào)試。第一步先開展系統(tǒng)各裝置位置坐標的定位調(diào)試工作,通過調(diào)整工具坐標系E與用戶坐標系U的參數(shù),修正參考坐標系S與用戶坐標系U的坐標值。第二步通過內(nèi)場預(yù)先制造管子法蘭固定支架模型,開展多種型號、不同形狀的管子測量試驗。第三步根據(jù)合攏管測量裝置獲取的管架模型空間數(shù)據(jù)信息計算繪制成管子加工圖,按加工圖制作合攏管管子,再與機械手按照指令自動移動到指定空間位置的法蘭進行裝配驗證(見圖7)。即根據(jù)合攏管測量裝置獲取支架模型的空間數(shù)據(jù)信息,然后將數(shù)據(jù)導(dǎo)入至機器人法蘭校準系統(tǒng),機械手按照指令自動移動到指定空間位置,模擬管子法蘭固定支架模型(見圖8)的相對空間位置,根據(jù)此空間位置制成合攏管管型,并將該合攏管管型在原測量固定支架模型上進行試裝、對比。經(jīng)過多種類型、各種典型空間位置的調(diào)試,樣機達到了設(shè)計的各項技術(shù)指標,圓滿完成樣機調(diào)試工作。

圖7 車間內(nèi)場合攏管試裝、校準

圖8 管子法蘭固定支架模型
3.3 實船應(yīng)用
以廣州某船廠在建的船舶為載體,分別對不同實船的分段階段、船臺階段和船塢階段的合攏管進行測量,選取測量管徑包括DN 200,DN 150,DN 100,DN 89,DN 50,DN 32等多種類型合攏管,選取的法蘭包括JIS,GB 2506,CB/T 46等多種標準。將多組實測數(shù)據(jù)同時輸入機器人法蘭校準系統(tǒng),存儲在系統(tǒng)的數(shù)據(jù)庫(見圖9),并生成工作清單。隨后,機械手根據(jù)清單,分別完成相應(yīng)動作指令,開展相關(guān)合攏管試裝和校準工作。
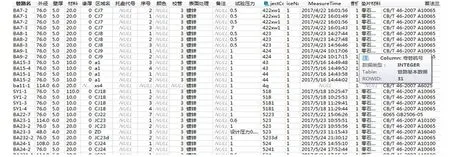
圖9 實船測量合攏管數(shù)據(jù)庫數(shù)據(jù)
經(jīng)過機器人法蘭校準系統(tǒng)校準后,多種管形的合攏管進行實船安裝,安裝效果如圖10所示,合攏管均達到一次安裝成功。經(jīng)船廠檢驗,合攏管與二端連接管法蘭連接符合《船用管子布置和安裝通用技術(shù)條件》(CB/Z 345-2008)[4],滿足船舶建造的行業(yè)工藝標準要求。

圖10 不同位置合攏管安裝效果
4 結(jié) 論
針對船舶合攏管的傳統(tǒng)制作現(xiàn)狀,提出并設(shè)計機器人法蘭校準系統(tǒng),并闡述設(shè)計思路、基本原理、系統(tǒng)組成、軟件實現(xiàn)、樣機制作等,通過實船應(yīng)用取得了較好效果,得出如下結(jié)論:
(1) 設(shè)計的機器人法蘭校準系統(tǒng)可以實現(xiàn)多種類型、多種空間位置的合攏管校準工作,實現(xiàn)實船一次安裝成功,達到節(jié)約材料、減少工時、提高精度、降低能耗、綠色造船等目的。
(2) 建立合攏管標準數(shù)據(jù)庫系統(tǒng),包括所有常用管徑類型、標準法蘭等信息,可以實現(xiàn)多組測量數(shù)據(jù)存儲、工作清單等功能,能夠滿足多批不同合攏管的制作需求,制作合攏管后的安裝效果符合船舶建造的行業(yè)(CB/Z 345-2008)工藝標準要求。
(3) 機器人法蘭校準系統(tǒng)樣機研發(fā)成功,徹底改變落后的傳統(tǒng)工藝方法,實現(xiàn)短時、精準、更加靈活的作業(yè),也標志著我國船舶工業(yè)合攏管技術(shù)向數(shù)字化、智能化發(fā)展邁進。
[1] 朱航, 王志勇, 秦嘉岷,等. 一種測量裝置制造方法:201320628801.3[P]. 2013-10-12.
[2] (美)JOHN J.機器人學(xué)導(dǎo)論[M].3版.北京:機械工業(yè)出版社,2006.
[3] 吳挺,吳國魁,吳海彬.6R工業(yè)機器人運動學(xué)算法的改進[J].機電工程, 2013,30(7): 882-887.
[4] 國防科學(xué)技術(shù)工業(yè)委員會.船舶管系布置和安裝工藝要求:CB/Z 345-2008[S].北京:中國船舶工業(yè)綜合技術(shù)經(jīng)濟研究院, 2008.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
