基于視覺的航空油霧噴嘴霧化角度自動檢測裝置
2018-03-02 03:10:05王廷俊
中國設(shè)備工程 2018年3期
關(guān)鍵詞:檢測
王廷俊
(中國航發(fā)沈陽黎明航空發(fā)動機有限責任公司,遼寧 沈陽 110043)
1 背景
計算機科學(xué)與總線技術(shù)如今日以快速發(fā)展,帶動著計算機視覺技術(shù)從初具雛形到逐漸成熟完善。如今工業(yè)產(chǎn)業(yè)的迅速發(fā)展與計算機視覺技術(shù)的日趨成熟有著密不可分的關(guān)系,在諸多領(lǐng)域如科研、醫(yī)療、制造加工等都可以看到計算機視覺模塊的應(yīng)用。計算機視覺技術(shù)不僅可以起到替代人眼的效果,降低人力成本,同時還能夠提高生產(chǎn)效率與機器人動作的可靠性與連貫性,在實際生產(chǎn)中與傳統(tǒng)的人力生產(chǎn)相比有著非常明顯的優(yōu)勢。
噴嘴是構(gòu)成航空發(fā)動機總管的一個重要元件,直接關(guān)系到發(fā)動機的燃燒效率和運行穩(wěn)定性。目前,航空發(fā)動機總管油霧噴嘴霧化角度的檢測仍然采用人工目測法,將一個帶有指針的量角器安裝在噴嘴外的有機玻璃罩上,將一個與霧化邊緣大約呈垂直角度的試刀和量角器的指針垂直連接,隨后通過人眼觀測逐漸調(diào)節(jié)量角器上的指針,直至目測基本與霧化邊緣重合,繼續(xù)調(diào)整接近霧化邊緣,當試刀上有第一滴燃油滴下,此時量角器所致角度即為所要測量的角度。得出結(jié)果后與出廠所要求的參數(shù)和誤差范圍比較,從而判定是否允許出廠。
上文介紹的這種傳統(tǒng)測量方式的準確率主要由人眼的正確率決定,隨機性高可靠性低,這種測量方式的依據(jù)只依靠于與霧化邊緣相切的一點,因此對于全部的霧化邊緣信息的利用率非常低,信息沒有得到充分利用。基于計算機視覺技術(shù)的航空油霧噴嘴霧化角度自動檢測裝置和方法可以克服上述現(xiàn)有技術(shù)的不足,通過圖像采集、圖像處理、邊緣檢測,最終計算得到噴嘴霧化角度。
2 主要內(nèi)容
利用圖像采集裝置獲取數(shù)字圖像,基于Labview軟件開發(fā)平臺編寫圖像處理算法對采集的圖像進行增強、邊緣檢測、二值化,去除弧點和細化等預(yù)處理,通過模式識別中的Hough變換獲取噴霧錐角的兩條邊界線,最終計算出噴嘴的霧化錐角。角度值顯示在人機交互界面上。
如圖1所示, 圖像采集裝置由工業(yè)相機2及其內(nèi)部的數(shù)字I/O觸發(fā)接口卡、光源1、防爆工控機3組成。工業(yè)相機2接受外部觸發(fā)信號,拍攝圖像,拍攝結(jié)束,通過網(wǎng)卡通信方式將圖像傳輸?shù)接嬎銠C中保存,獲取到噴嘴霧化角度的數(shù)字化圖像。
工業(yè)相機2置于金屬盒體內(nèi)部,盒體為封閉的方形殼體,殼體內(nèi)充滿惰性氣體,比如氬氣;盒體一面為有機玻璃,用于工業(yè)相機照相,這樣整體構(gòu)成了防爆相機。外置盒體的工業(yè)相機2固定于箱體5 的外面,光源1固定于箱體5內(nèi)部。箱體5為帶有拉門的方形噴嘴性能檢測試驗柜。在實際應(yīng)用中應(yīng)注意:照明光源的安裝位置與方向應(yīng)保證視場有足夠的照度;選用照明光源時相應(yīng)參數(shù)也要滿足條件。照明方法比較常用的有:正面光源、背面光源。為了獲取清晰噴嘴霧化圖像,本裝置的光源選用白色的背面光源。光源和相機分別位于噴嘴的兩側(cè),箱體后面的背板為黑色,背板下部固定有光源,光源采用兩個白色LED燈,分別位于背板左右兩側(cè)并相對于噴嘴對稱。
如圖2所示,應(yīng)用環(huán)境惡劣,背景復(fù)雜,通過圖像采集裝置采集來的圖像樣本不能直接用于計算出噴嘴霧化角度,需要進行圖像的預(yù)處理,最終得到二值化處理后的圖像。基于Labview軟件開發(fā)平臺編寫Hough算法進行圖像邊界線獲取,通過經(jīng)典Hough變換得到霧化角度的邊界線,利用Hough變換利用圖像空間和Hough參數(shù)空間的點一線對偶性,把圖像空間的檢測問題轉(zhuǎn)換到參數(shù)空間,先進行對參數(shù)空間的累加統(tǒng)計,隨后以找累加器峰值的方法檢測直線,最后計算霧化角度并將結(jié)果顯示在人機交互界面上。
噴霧錐角圖像如果采用只取累加器中前兩個最大值對應(yīng)直線為邊界,非常容易造成兩條直線均為同一邊緣邊線(微角度差別)導(dǎo)致檢測結(jié)果不準確。所以,要左右兩條邊緣線都檢測,采用將圖像分為左右兩部分檢測的方法進行。安裝攝像頭時鏡頭軸心線與噴霧角軸心線在一個平面內(nèi),所以可以選擇圖像一半寬度處為左右兩部分的分隔線。雖然Hough變換計算量非常大,但由于細化后白色目標點數(shù)量的減少使得計算量的復(fù)雜度得以降低,所需的檢測時間也大大縮短,基本可以滿足實時計算的要求。如圖3所示,預(yù)處理包括:中值濾波算法進行圖像的增強去噪處理,背景重建,背景減除法進行目標檢測、最大熵閥值二值化,利用形態(tài)學(xué)的垂直模板和歸一化處理進行圖像的去除弧點和細化。
基于Labview軟件開發(fā)平臺編寫圖像預(yù)處理,LabVIEW,被稱為G語言,不同于傳統(tǒng)軟件的復(fù)雜繁榮,它的開發(fā)界面更為易操作,降低了編寫方式的難度。Labview圖像處理工具包IMAQ Vision,包含了300多種機器視覺和科學(xué)圖像處理的函數(shù)庫。可以完成多種圖像處理、分析以及計算等。IMAQ Vision不僅可以加快用戶、集成商、制造商對工業(yè)視覺相應(yīng)軟件的開發(fā),甚至還可以被使用于需要高可靠性的實驗室自動化視覺系統(tǒng)研發(fā)。中值濾波法是一種非線性平滑技術(shù),它將每一像素點的灰度值設(shè)置為該點某鄰域窗口內(nèi)的所有像素點灰度值的中值。常用于用來保護邊緣信息,是經(jīng)典的平滑噪聲的方法。采集來的圖像樣本首先要進行中值濾波,去除噪聲。
選用已采集無目標的圖像作為背景圖像,通過背景減除法獲取目標圖像,完成目標檢測。
圖像的二值化處理選用最大熵閥值的方法進行,以閾值將圖像分為兩類,兩類平均熵取最大值時此時的閾值便為所要的最佳閾值,方法如下。
求出圖像中所有像素的分布概率,p0,p1,…,p255(圖像灰度分布范圍0~255);

式中,Ni為灰度值為i 的像素個數(shù);Nimage為圖像的總像素數(shù)。
給定一個初始閾值Th=Th0,將圖像分為C1和C2兩類;
分別計算兩個類的平均相對熵

選擇最佳的閾值Th=Th*,使得圖像按照該閾值分為C1和C2兩類后,滿足:

做完背景減除及二值化后,由于干擾、噪音的存在,因此最后霧化角度邊界線提取的數(shù)據(jù)不夠準確,因此使用形態(tài)學(xué)算子進一步濾除噪聲和填充小的空洞。數(shù)學(xué)形態(tài)學(xué)主要是用具有一定形態(tài)的結(jié)構(gòu)元素去量度和提取圖像中的對應(yīng)形狀以達到對圖像分析和識別的目的,因此它的應(yīng)用不僅在保證原有基本形狀特征的同時還可以起到簡化圖像數(shù)據(jù)的效果。在實際實驗中發(fā)現(xiàn),采用垂直模板,對圖像先進行閉運算,再進行開運算得到的效果最好。
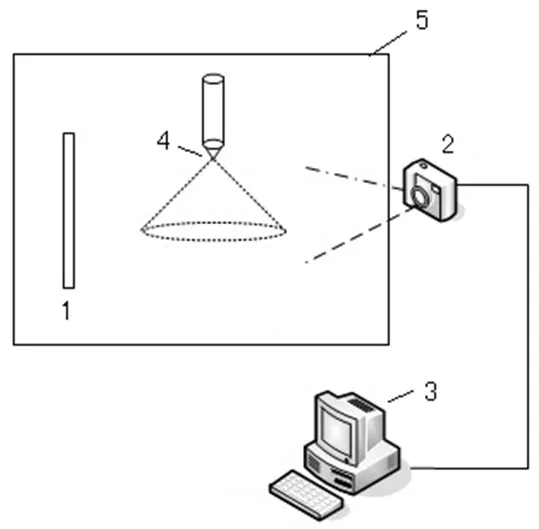
圖1 裝置結(jié)構(gòu)示意圖

圖2 方法流程圖
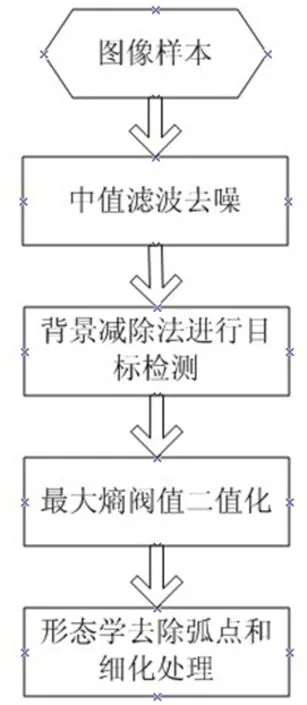
圖3 圖像預(yù)處理方法流程圖
3 結(jié)語
本文介紹的基于視覺的航空油霧噴嘴霧化角度自動檢測裝置不僅具有快速性、實時性、非接觸等特點,還運用了測量領(lǐng)域目前廣泛流行的圖形化軟件開發(fā)平臺Labview。IMAQ Vision圖像預(yù)處理軟件包保證了圖像處理的實時性和高速性要求,人機交互友好,可操作性強,同時采用防爆相機和防爆工控機,能夠防止油霧進入相機以及工控機而造成的該裝置斷路、故障,甚至爆炸。將計算機視覺技術(shù)用于航空噴嘴霧化角度檢測,充分利用整個霧化邊緣的信息,開辟了計算機視覺技術(shù)應(yīng)用的新領(lǐng)域,解決了航空噴嘴人工手動測量的隨機性,提高了準確率,保證了測量的可靠性,提高了自動化程度。
[1]Carlos Mera,Mauricio Orozco-Alzate,John Branch,Domingo Mery. Automatic Visual Inspection: An Approach with Multi-Instance Learning[J]. Computers in Industry,2016.
[2]Ryosuke Nakajima,Keisuke Shida,Toshiyuki Matsumoto. A Study on the Effect of Inspection Time on Defect Detection in Visual Inspection[M].Springer Berlin Heidelberg:2013.
[3]Usha Poli,P Bidinger,Swarnalata Gowrishankar. Visual inspection with acetic acid (via) screening program: 7 years experience in early detection of cervical cancer and pre-cancers in rural South India[J]. Indian Journal of Community Medicine,2015,40(3).
[4]José R. Lino,Joana Ramos‐Jorge,Valéria Silveira Coelho,Maria L. Ramos‐Jorge,Marcos R. Moysés,José C. R. Ribeiro.Association and comparison between visual inspection and bitewing radiography for the detection of recurrent dental caries under restorations[J]. Int Dent J,2015,65(4).
[5]Ji Gang Wu,Kuan Fang He,Bin Qin. Research on Edge Detection of Thin Sheet Part Dimension Inspection System Based on Machine Vision[J]. Applied Mechanics and Materials,2012,1469(103).
[6]衡思江. 小型航空發(fā)動機氣動霧化噴嘴霧化特性研究[D].中國科學(xué)院研究生院(工程熱物理研究所),2015.
[7]伍文鋒,吳建華,鐘柳花,游江. 航空發(fā)動機燃油噴嘴霧化角度測量研究[J]. 航空發(fā)動機,2017,43(05):69-73.
[8]王超,林大烜,丁紅兵,王剛,安海驕. 基于凝結(jié)實驗平臺的音速噴嘴凝結(jié)現(xiàn)象研究[J/OL]. 北京航空航天大學(xué)學(xué)報,:1-7(2017-07-11).
[9]周晴晴. 航空低量窄霧滴譜旋轉(zhuǎn)離心噴嘴霧化性能研究[D].中國農(nóng)業(yè)科學(xué)院,2016.
[10]王彥滑. 近距碰撞式航空發(fā)動機噴嘴燃油霧化特性研究[D].沈陽航空航天大學(xué),2015.
[11]茹煜,金蘭,周宏平,賈志成. 航空施藥旋轉(zhuǎn)液力霧化噴頭性能試驗[J]. 農(nóng)業(yè)工程學(xué)報,2014,30(03):50-55.
猜你喜歡
中國設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48