巴基斯坦ML1鐵路擴能項目工程測量方法研究
2018-03-02 07:07:10
鐵道勘察 2018年1期
關鍵詞:測量
(中鐵工程設計咨詢集團有限公司濟南設計院,山東濟南 250022)
1 工程概況
巴基斯坦伊斯蘭共和國鐵路ML-1線途經信德、旁遮普和開伯爾-普赫圖赫瓦三省,是巴基斯坦鐵路運輸的主通道。線路南端起于卡拉奇(Karachi),向東北方向經洛赫里(Rohri)、木爾坦(Multan)、拉合爾(Lahore)后轉向西北方向,經拉瓦爾品第(Rawalpindi)止于白沙瓦(Peshawar),既有正線全長1 817 km(含洛德蘭至哈內瓦爾弦線91 km)。其中既有鐵路卡拉奇(Karachi)經木爾坦(Multan)、拉合爾(Lahore)至沙赫德拉(Shahdara)段(1 270.83 km)和查克拉拉(Chaklala)至戈爾拉(Golra)段(18.63 km)為復線鐵路;既有鐵路沙赫德拉(Shahdara)至查克拉拉(Chaklala)段(277.04 km)、戈爾拉(Golra)至白沙瓦(Peshawar)段(159.58 km)和洛德蘭(Lodhran)至哈內瓦爾(Khanewal)段(91 km)為單線鐵路。哈維連(Havelian)支線為單線鐵路,南端起于ML-1線Taxila站,北至哈維連(Havelian)站,既有正線全長55.11 km。
本次ML-1線擴能項目工程為Mehrabpur(梅赫拉普)至North Block Hut(北街屋)段既有雙線(長93.8 km),海德拉巴(含)至納瓦布沙阿(不含)既有雙線(長114.08 km),共計207.88 km(如圖1所示)。
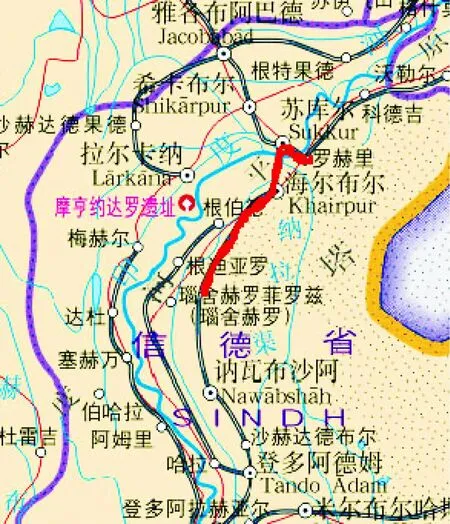
圖1 Mehrabpur-North BlockHut地理位置示意
2 坐標系統與高程系統選用
2.1 平面坐標系
采用工程獨立坐標系統,線路高程面上的邊長投影變形值不大于25 mm/km,即投影長度變形(包括高程歸化、高斯正投影變形之和)不大于1/40 000。采用WGS84參考橢球,ITRF2005框架,高斯投影[1,2]。東坐標和北坐標的加常數分別為500 km、0。工程橢球構建采用改變橢球參數的方法(即參考橢球長半軸直接加投影面大地高并保持扁率和定向不變)。參照中國鐵路框架網CP0的技術標準(一等)建立全線的框架平面控制網(CP0),框架平面控制網CP0每50 km左右布設一個控制點,觀測1~2個時段,每個時段≥4 h。數據處理:采用GPS長基線解算軟件,精密星歷數據。次級平面控制網參照中國鐵路基礎平面控制網CPI的技術標準,按四等GPS建立。基礎平面控制網CPI每2 km左右建立一個控制點,觀測、計算按四等GPS測量要求執行[1,2,12]。基礎平面控制網(CPI)聯測至框架平面控制網(CP0)。
本段收集2個國際IGS點(WGS84參考橢球,ITRF2005框架坐標),位于距離巴基斯坦最近的烏茲別克斯坦、印度境內,作為本次框架控制網CP0約束平差的起算點(如表1)。

表1 CP0約束平差起算點 m
2.2 高程系統
采用巴基斯坦國家高程基準,按四等水準技術標準建立高程控制網,沿線每2 km埋設一個線路水準點,點位與平面控制點共樁[1,2];另外,在橋梁兩端的橋臺應加設水準點,橋臺水準點采用鑿刻方法設置。收集巴基斯坦鐵路部門全國高程控制點(SOP)2個,分別位于納瓦布沙阿、羅赫里,作為本次水準計算的起算點(如表2)。

表2 高程控制測量起算點
3 平面控制網的建立
首先建立框架控制網CP0,然后在框架控制網CP0基礎上布設基礎平面控制網CPI,各級平面控制網的作用為:框架控制網CP0主要為勘測、施工建立平面坐標框架;CPI主要為勘測、施工提供坐標基準。本項目采用四等GPS測量。各級平面控制網的主要技術要求如表3。

表3 各級平面控制網設計的主要技術要求
3.1 框架控制網CP0
CP0控制點沿線路走向每50 km左右布設一個,在線路起點、終點及與相鄰銜接段,均應布設CP0控制點。本段共布設3個CP0點,分別位于線路起點(CP009)、中點(CP010)、終點(CP011)。CP0控制點靜態測量過程中,與相鄰的Nawabshah至Lakah Road段范圍內布設的CP0控制點CP007、CP008同步觀測。按照技術設計書要求觀測1個時段,時長不小于6 h,保證線路框架網的測量精度和相鄰段落的平順銜接[1,2],CP0網形見圖2。
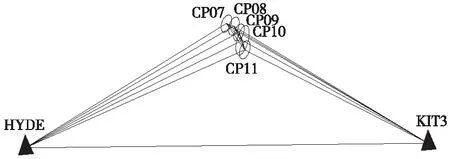
圖2 CP0網形
CP0基準網基線向量解算采用商用軟件GAMIT,并與相鄰的Lakah Road-Rohri段CP0測量數據統一解算。基線解算前,按規范及技術設計要求對外業全部資料進行檢查和驗收,檢查結果應滿足技術設計書要求。基線解算前,通過Internet獲取精密星歷(IGS)數據,采用精密星歷進行基線解算。同一時段觀測值的數據剔除率應小于10%。采用多基線解算模式進行基線解算,計算結果應包括基線向量的各坐標分量及其協方差陣等平差所需的元素。解算所有相關基線向量,生成otesta.303基線文件[9,11]。各項指標統計見表4。
GNSS網平差采用Tgppswwin32進行三維整體平差處理。無約束平差選取IGS站KIT3點空間坐標作為起算基準。無約束平差計算指標統計見表5。

表4 CP0控制網計算環閉合差精度指標統計 mm
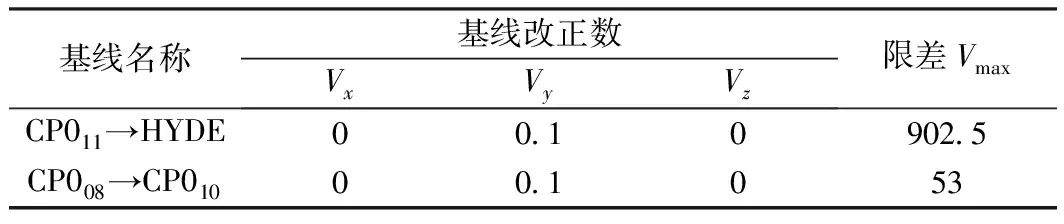
表5 CP0控制網計算無約束平差精度指標統計 mm
將KIT3和HYDE的空間三維坐標轉換為大地坐標,并進行約束平差計算。各項指標統計見表6。

表6 CP0控制網計算約束平差精度指標統計
3.2 基礎平面控制網CPI
CPI控制網應在CP0的基礎上,按四等GNSS網要求施測(如表7)[3,4,6]。

表7 各級GNSS平面控制網的主要技術
CPI控制網沿線路敷設,每隔2 km左右布設一個控制點,采用邊聯結方式構網。大的車站和大橋、長大隧道應增設控制點。大的車站布設至少2個點,點對必須通視,間距一般為600~800 m[3,7]。本項目中,在框架控制網(CP0)基礎上布設了46個基礎平面控制網點(CPI),編號為CPI230-CPI274(見圖3)。
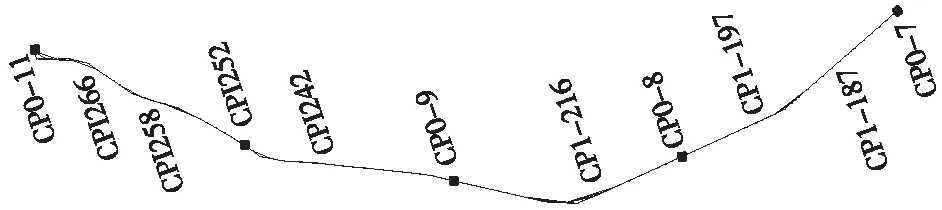
圖3 CPI網形
觀測中,與相鄰的Nawabshah至Lakah Road段落范圍內CPI控制點CPI228、CPI229進行了搭接,保證線路基礎平面網的平順銜接。GNSS基線采用靜態相對定位模式(廣播星歷),以LGO商用軟件解算[4]。基線解算指標統計見表8。

表8 CPI控制網計算環閉合差精度指標統計 mm
在CPI基線解算合格的基礎上,固定CP008空間三維坐標,進行無約束平差計算(見表9)。
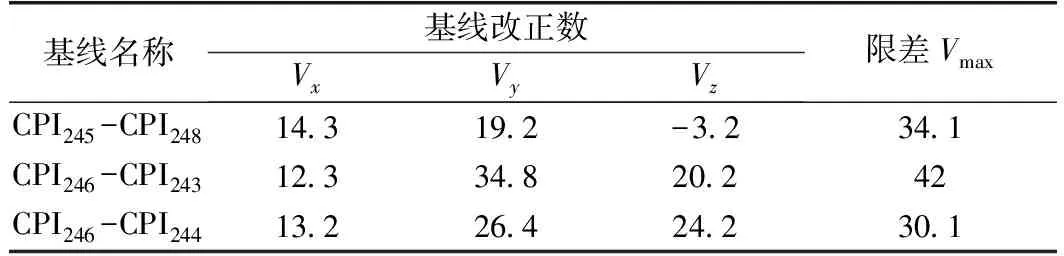
表9 CPI控制網計算無約束平差精度指標統計 mm
以聯測的CP0點計算結果作為已知點進行CPI控制網的約束平差。對位于測區中部的CP010進行三維約束,兩端的CP0點進行二維約束(見表10)。

表10 CPI控制網計算約束平差精度指標統計
提供標準三度帶分帶坐標,中央子午線經度為68°30′,投影面大地高程為-45 m,坐標結果數值保留至mm。
4 校正參數求解
4.1 作業測區劃分
本項目主要采用GNSS-RTK方法開展作業,包括百米標丈量、中線測量、中平測量、水文測量、橫斷面測量等。將整個線路測區劃分為6個作業區,每個作業區的長度不超過15 km;每個作業區內保證含有5~6個控制點,兩作業區保證一對以上GNSS點銜接共用,以確保各測段之間的銜接。
4.2 校正參數計算
(1)經驗四參數法
采用作業區內5~6個已知GNSS控制點的兩套平面坐標進行求解。轉換參數殘差應滿足以下要求:平面坐標殘差X、Y分別小于±15 mm,高程殘差小于±20 mm。基準站設在作業測區中心附近GNSS控制點上[6,7]。
(2)單點高程校正法
①單點高程校正法的原理是采用一個點的異常高(=大地高-水準高)作為常量平差值[6,11]。
②每個基準站必須使用一個參數。
③求解基準轉換參數時,選取基準站相鄰的控制點4個。控制點順序:基準站控制點必須為首個,其余順序隨機。所有點均參加水平校正,垂直校正僅選擇基準點(見圖4)。
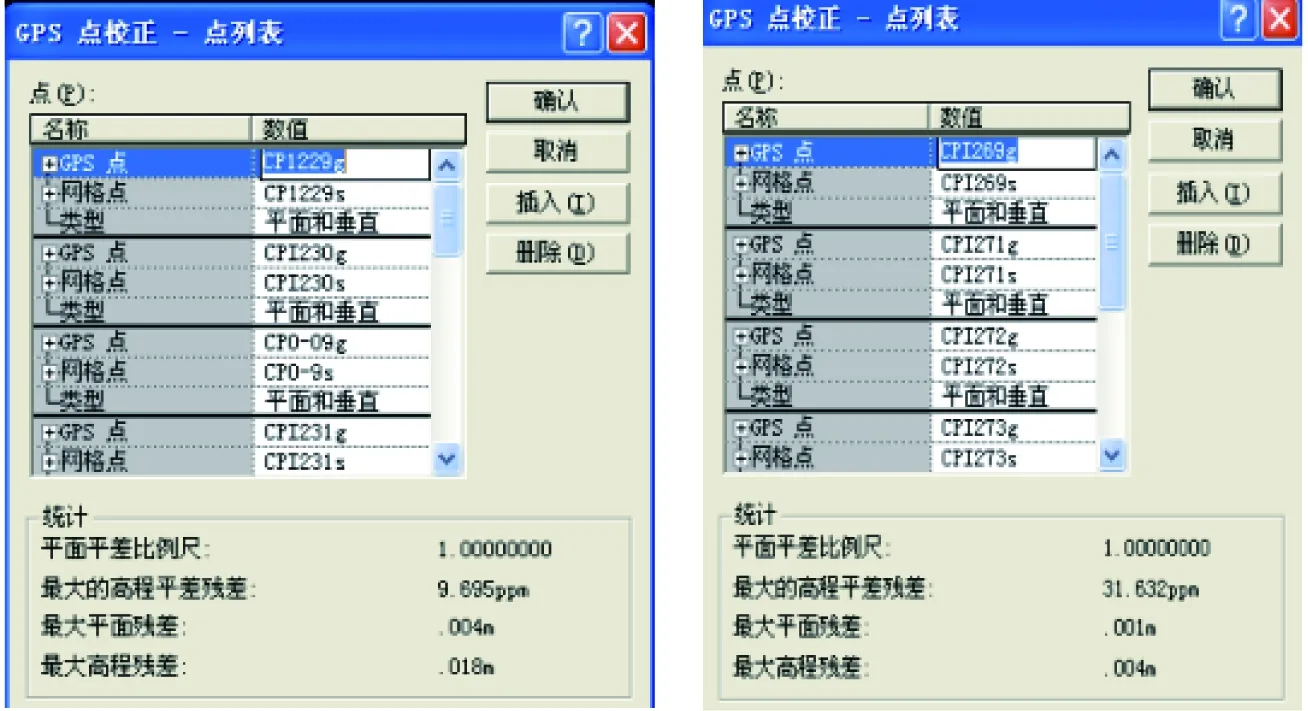
圖4 點校正
④基準點與流動站測量距離為1 km以內,困難段不超過1.5 km。
⑤基準站與流動站的參數應匹配。
⑥外業成果導出之前禁止重新計算參數,以免引起已測外業成果因參數變化產生錯誤。
單點高程校正法線路中心坐標與全站儀采集的線路中心坐標較差見表11(以5 km為例)。
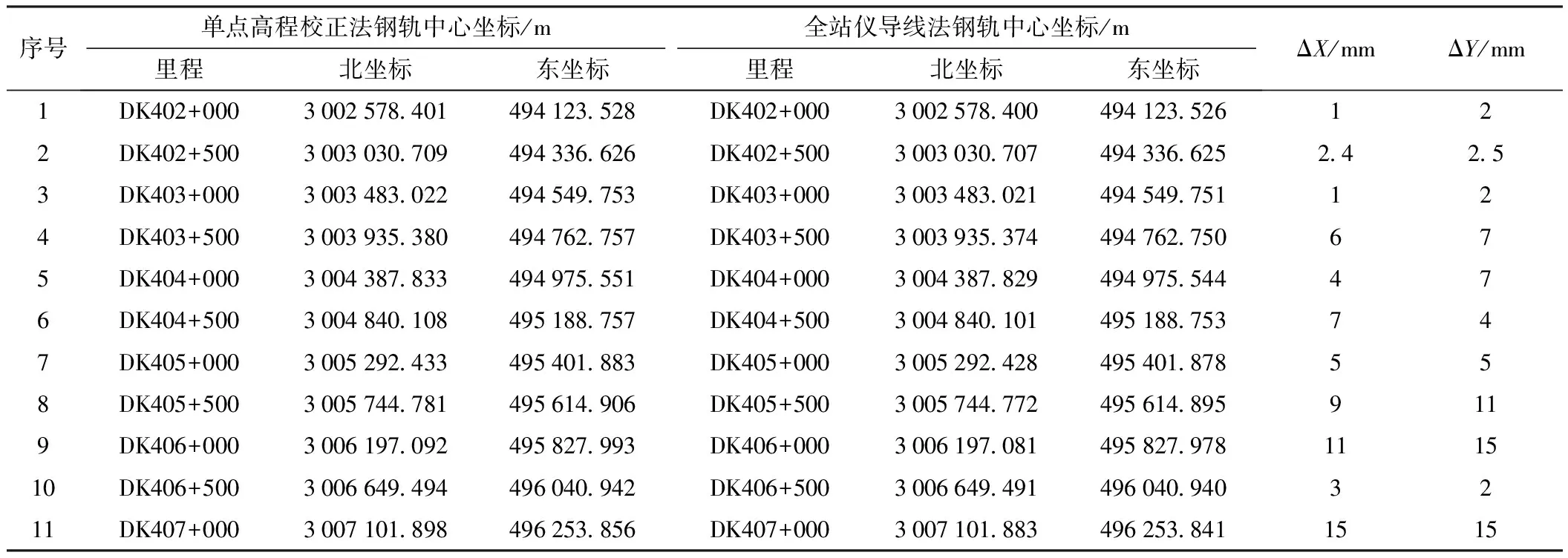
表11 單點高程校正法與全站儀導線法采集鋼軌中心坐標較差
單點高程校正法軌頂高程與水準儀中平較差見表12(以5 km為例)。
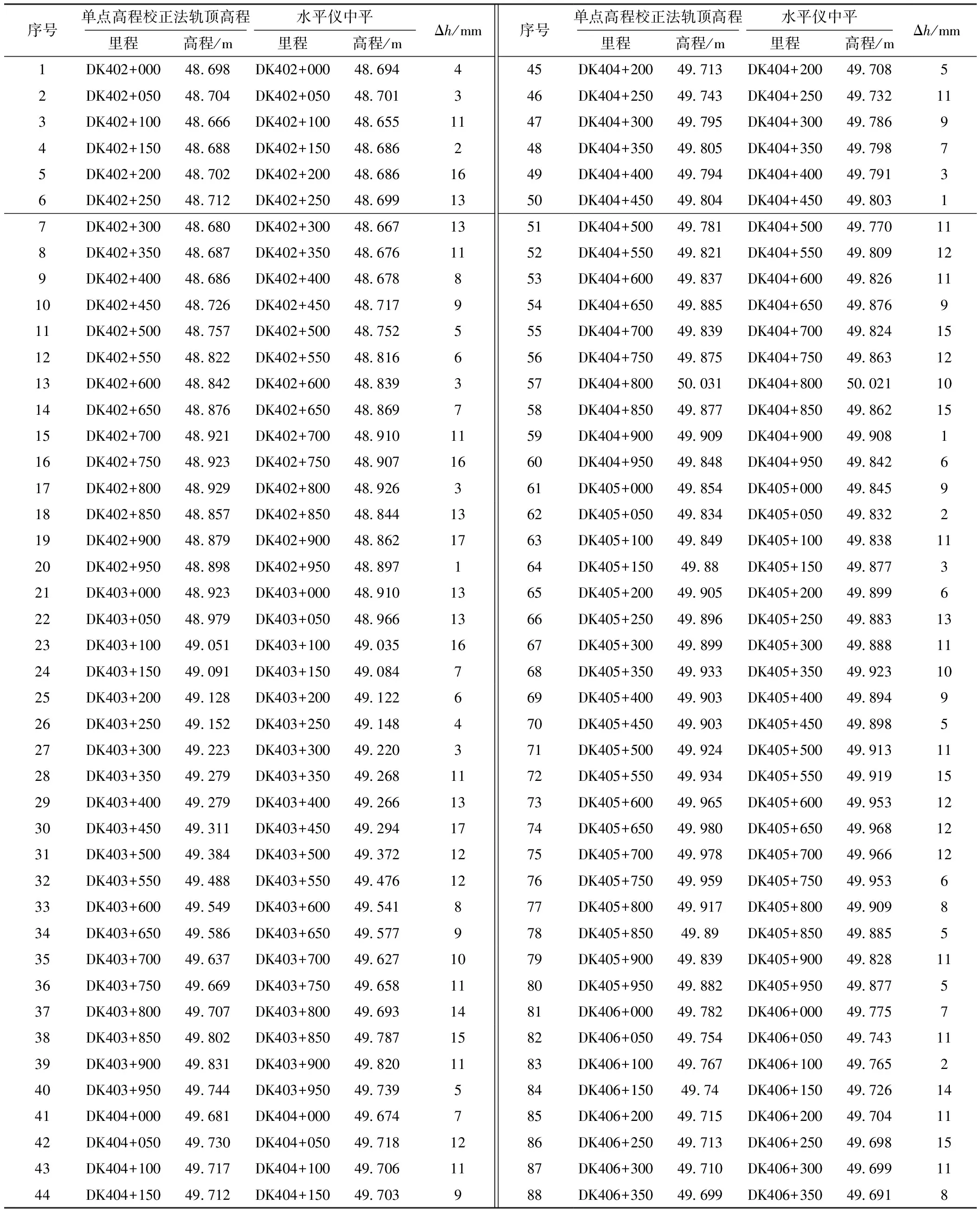
表12 單點高程校正法軌頂高程與水平儀中平較差
經過數據對比,對于小范圍內的坐標和軌頂高程采集,單點高程校正法均能滿足勘測要求。
5 GNSS-RTK三維一體化既有線測繪
在平面高程控制網的基礎上,采用GNSS-RTK技術,一次性進行里程、中線撥距、軌面高程測量。在進行既有線里程、軌道高程、軌道中心坐標測量時,同步開展橋涵(調查及照片)、路基專業加樁測量。GNSS-RTK采用“一拖三”的形式:一個主站、一個流動站測量右線準確里程及中線,一個流動站用于橋涵路基加樁,一個流動站用于對應測量左線的軌面高程及中心線坐標。
5.1 既有線中線測量及里程計算
(1)線路里程按既有線右線拉通。并行地段,左線對應右線里程開展既有軌面、曲線整正撥距測量工作;繞行地段單獨推導里程,單獨開展測量工作。
(2)既有線的里程從現場直線地段公里標引出。
(3)對于長直線地段,為減少撥距量,按照折線處理。當交角小于12′時,不配半徑,里程按折線推導。當交角大于12′時,配10 000 m半徑推導里程。
(4)每個測量點觀測時間不少于15 s,信號遮擋地段延長到30 s。采用對中桿、基座進行對中固定測量。
(5)采用既有線中線坐標計算曲線總偏角,結合巴方提供的臺賬資料或現場臺賬進行曲線要素配置,推導中線里程。
5.2 既有軌面高程及鋼軌中心坐標測量
(1)直線地段樁間距不超過50 m,曲線地段不超過20 m。
(2)直線地段測量鋼軌中心,曲線地段既測量內軌高程,又測量鋼軌中心坐標。直線地段鋼軌中心高程和曲線地段內軌高程即為既有軌面高程成果。
(3)既有軌面高程及鋼軌中心坐標測量采用天寶GPS-RTK測量,基準站置于CPI點位上,基準站與流動站間直線距離不超過1 km,困難情況下不超過1.5 km。無信號地段采用高精度全站儀進行測量。
5.3 整正撥距計算
(1)整正撥距計算根據實測鋼軌中心坐標進行,直線地段樁間距50 m,曲線地段樁間距20 m。
(2)參照巴方提供臺賬或者現場臺賬曲線要素,按照曲線半徑、緩和曲線配置表進行整正撥距計算。半徑、緩和曲線長度單位為“m”。為了盡可能減少撥距量,按半徑值為“5”的整倍數、緩和曲線長度值為“10”的整倍數配置。
(3)同心圓曲線,左右線宜采用同一方位角。
6 結束語
在本項目中,既有鐵路的現狀(直線邊過長)制約著控制網的結構和控制網網形,進而影響校正參數計算。在受影響地段,小范圍使用單點高程校正法,解決了因控制網網形不佳而造成的參數計算殘差過大的情況。在使用范圍內,經過高精度全站儀和水準儀的檢核,可滿足使用要求。
在一定的技術條件(平面、高程控制網的精度、點間距等)支持下,GNSS-RTK三維一體化測繪可提高既有線測繪綜合作業效率,其里程丈量、中線平面及中平均能滿足勘測設計要求。
[1] TB10101—2009 鐵路工程測量規范[S]
[2] TB10054—2010 鐵路工程衛星定位測量規范[S]
[3] TB10105—2009 改建鐵路工程測量規范[S]
[4] 李征航,黃勁松.GPS測量與數據處理[M].武漢:武漢大學出版社,2010
[5] 張建民,劉曉明.GPS-RTK三維一體化既有線測繪方法的研究[J].鐵道勘察,2012(5):6-9
[6] 周忠謨,易杰軍,周琪.GPS衛星測量原理與應用[M].北京:測繪出版社,2004
[7] 呂益恕.鐵路勘察與設計[M].北京:中國鐵道出版社,1994
[8] 丁克良,劉成,卜慶顥,等.GPS TTK技術在鐵路既有線勘測中的應用[J].中國鐵道科學,2005,26(2):49-52
[9] 匡團結.TBC與GAMIT進行高速鐵路框架控制網基線解算的精度分析[J].鐵道勘察,2015(4):8-11
[10] 張大春,趙崢.GPS-RTK技術在鐵路勘測中的應用分析[J].北京測繪,2009(3):31-33
[11] 魏二虎,黃勁松.GPS測量操作與數據處理[M].武漢:武漢大學出版社,2004
[12] 孔祥元,郭際明,劉宗泉.大地測量學基礎[M].武漢:武漢大學出版社,2006
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00