奧托-II燃料加注智能控制系統優化設計
2018-03-02 08:04:01劉兆凱
智能計算機與應用 2018年1期
劉兆凱
(中國人民解放軍91640部隊, 廣東 湛江 524064)
引言
奧托-II燃料是當前熱動力魚雷的主要推進劑,例如美軍的MK46、MK54等型號的魚雷都是使用的奧托-II燃料,將奧托-II燃料加注到魚雷的動力系統中,并通過發動機推進器實現魚雷自主航行。奧托-II燃料是一種硝酸酯類燃料,具有一定的毒性和腐蝕性,因此在魚雷存儲保管中,需要將燃料卸載分開保管,在備戰轉級時進行燃料加注。由于奧托-II燃料對人體有一定的毒性危害,為了提高燃料加注的智能性,降低燃料加注的風險和時間開銷,需要研究一種智能的奧托-II燃料加注系統,能夠有效提高魚雷轉級的效率,同時降低對人體的損傷,研究奧托-II燃料加注智能控制系統優化設計方法,在軍事應用中具有重要意義[1]。
當前,對奧托-II燃料加注方法主要采用人工加注方法,存在中毒風險性大和加注量控制不準等問題[2]。為了提高燃料加注的智能性,本文提出基于嵌入式多線程總線控制技術的燃料加注智能控制系統設計方案,系統設計包括控制算法設計、硬件設計和軟件開發三部分。首先進行加注系統的控制原理分析和控制算法設計,然后進行燃料加注控制系統的硬件開發設計,最后采用ARM Cortex-M0為核心處理器,結合單片機進行燃料加注系統計算機控制,并進行系統測試,展示了本文設計系統在提高奧托-II燃料加注智能性方面的優越性能。
1 控制原理分析和控制算法
本文研究奧托-II燃料加注智能控制系統,首先進行燃料加注的控制原理分析。燃料加注系統控制過程主要是燃料輸送的電機控制過程[3],以功率因素、電機效率、輸出電壓和電流為控制約束參量,構建奧托-II燃料加注系統的控制決策函數,采用模糊PID控制方法,假設r為燃料加注系統電機控制輸入,P(s)為被控過程的自適應反饋調節參量,M(s)為被控過程的穩態控制誤差;Q1(s)和Q2(s)構成燃料加注交流同步伺服系統的容錯性控制系數,構建一個變結構的前向三層自適應控制器,將燃料的加注當量等參數輸入到模糊PID神經網絡的輸入層,得到控制器的參數自整定性輸出為:
(1)
采用伺服控制單元對燃料加注系統的直流電機傳動狀態進行反饋調節,得到優化的控制方程描述為:
(2)

對燃料加注控制系統進行時延補償和誤差修正,在不確定時延和小擾動作用下,誤差補償后的輸出量為:
(3)
其中,A為伺服電動機組的轉矩,B為恒功率區的過載,通過速度控制、位置控制和轉矩控制,對加注系統的六相永磁無刷直流電機進行功率調節,得到恒定的輸出功率狀態為:
(4)
根據Lyapunov穩定性原理,通過對燃料加注系統電機轉動慣量參量的自適應調整,得到燃料加注系統并聯控制確定項為:
(5)
加注系統控制電機同步阻尼控制的效率為:
(6)
燃料的加注傳輸效率為:
(7)

2 控制系統的硬件設計
2.1 總體結構和技術指標
本文設計的奧托-II燃料加注智能控制系統由AD模塊、上位機通信模塊、數據采集模塊、集成控制模塊和人機交互模塊組成[5],系統結構組成如圖1所示。
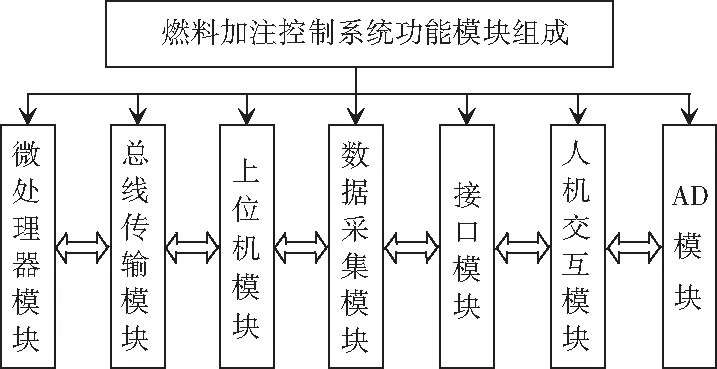
圖1 系統的功能模塊組成Fig. 1 Functional block composition of the system
采用嵌入式技術進行系統開發,結合多線程總線控制和程序調度方法進行控制系統的硬件開發設計[6],采用ADSP2161/2162/2164作為集成信息處理芯片,使用51單片機進行燃料加注系統的計算機智能控制,根據控制程序進行遠程無害化加注。在人機交互界面進行奧托-II燃料加注智能控制系統的參數配置,根據參數設置,通過多線程的PCI總線將控制信息送到DSP,使用LabWindows/CVI進行燃料加注的過程控制,根據魚雷狀態進行加注量判斷和加注時間的優化[7]。
根據上述設計原理分析,結合應用環境,給出本文設計的燃料加注系統的技術參數指標為:
(1)奧托-II燃料加注智能控制系統的輸入電壓范圍為:+/-220 V、+/-360 V,具有16位定點STM32內核;
(2)加注過程控制的時延誤差小于0.02 ms,燃料容量誤差小于0.1 L;
(3)加注控制系統對控制信號的最高采樣速率為132 KHz,最低采樣速率為15 KHz,能滿足多種型號魚雷的燃料加注需求;
(4)A/D分辨率:12位(至少);
(5)數據的回放形式包括CW、LFM、HFM等多種形式,能實時讀取燃料加注情況。
根據上述設計指標,進行燃料加注智能控制系統的硬件模塊化設計。
2.2 模塊化設計與實現
采用嵌入式ARM Cortex-M0為核心處理器,以ADI公司的ADSP21160處理器系統作為核心控制器,進行硬件模塊化設計,結合單片機進行燃料加注系統計算機控制,完成程序加載和上位及通信等,硬件設計包括傳感器模塊、集成控制模塊、AD模塊和人機交互模塊等[8-10],對各個功能模塊的設計描述如下。
2.2.1 傳感器模塊
傳感器模塊是實現對燃料加注的實時數據采集功能,采用壓電傳感器和電磁傳感器進行數據采集,滿足16位DSP和32位DSP的定點數據采集功能。傳感器進行燃料加注數據采集中采用20條左右的單周期指令進行多線程控制,采用電壓為3.2 V的有源晶振作為時鐘源,進行數據采集過程中的時鐘控制,得到如圖2所示的傳感器模塊電路。
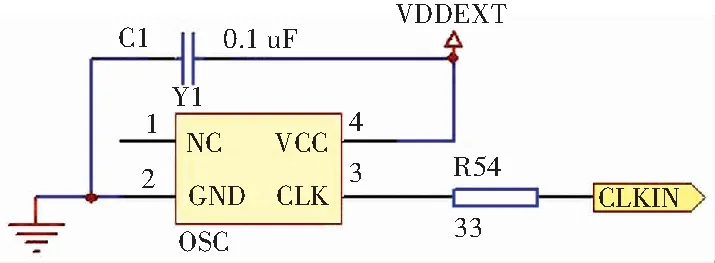
圖2 傳感器模塊電路Fig. 2 Sensor module circuit
2.2.2 集成控制模塊
集成控制模塊是燃料加注控制系統的核心,采用PCI9054的LOCAL總線進行控制程序加載,采用ZigBee技術進行船舶奧托-II燃料加注智能控制信息遠程通信傳輸和無線射頻識別,各種控制信號由CPLD產生,在輸出終端輸出8路D/A轉換信號,采用 8 位和 16 位單片機微控制器進行燃料加注系統的智能控制,控制模塊電路設計如圖3所示。
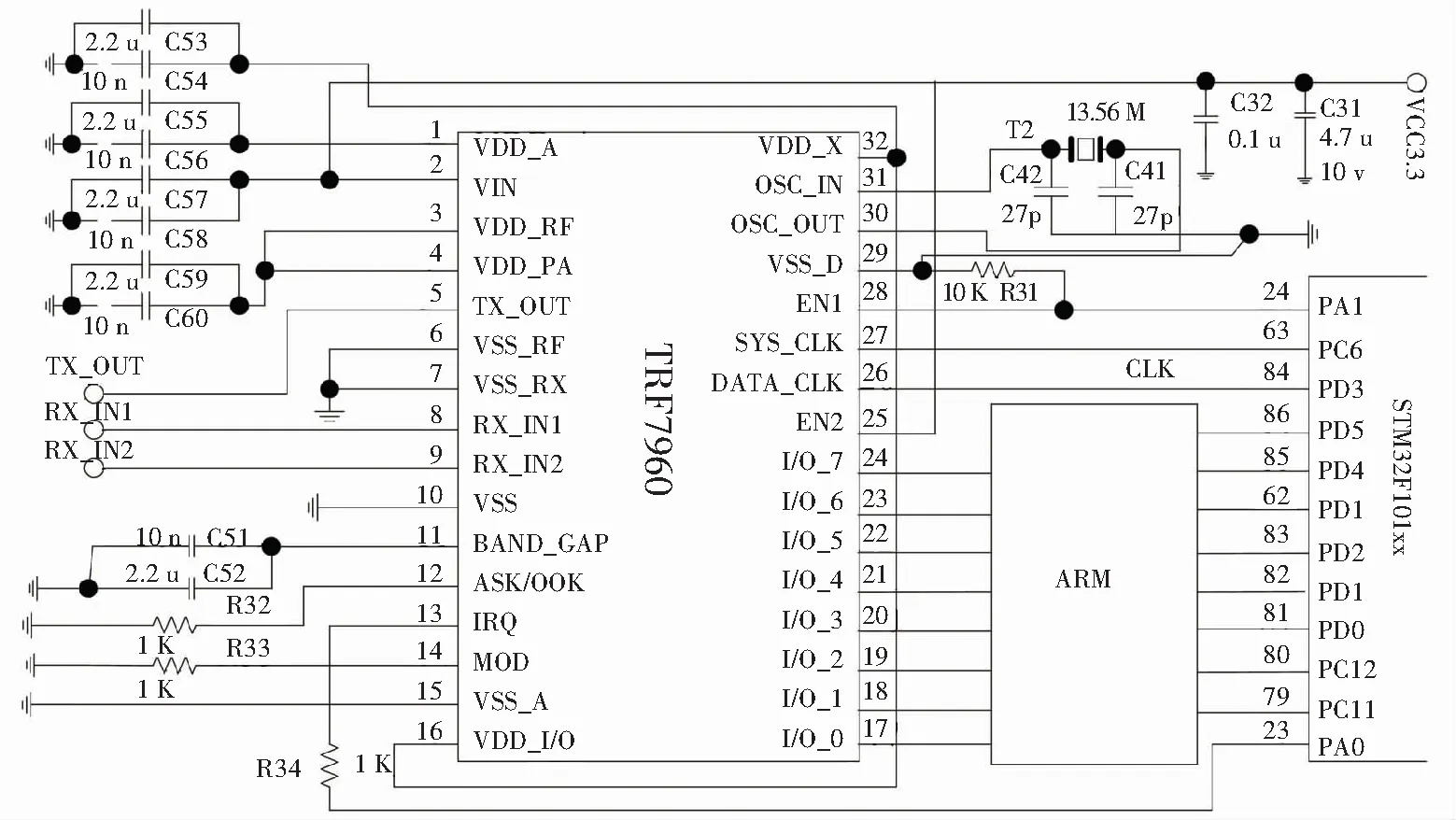
圖3 集成控制模塊電路Fig. 3 Integrated control module circuit
2.2.3 AD模塊
AD模塊采用AD公司的AD9225芯片設計,根據燃料加注的AD采樣需求,AD模塊設計采用了單5 V供電,分辨率12位,輸入到AD的電源為模擬電源和數字電源,AD9225可以差分輸入,也可以是單端輸入,數字電源用于控制數字接口電平,AD控制器的模擬控制管腳包括SENCE和VREF,采用并行外設接口(PPI)進行人機通信和數據遠程傳輸。根據上述設計描述,得到AD模塊的電路設計如圖4所示。
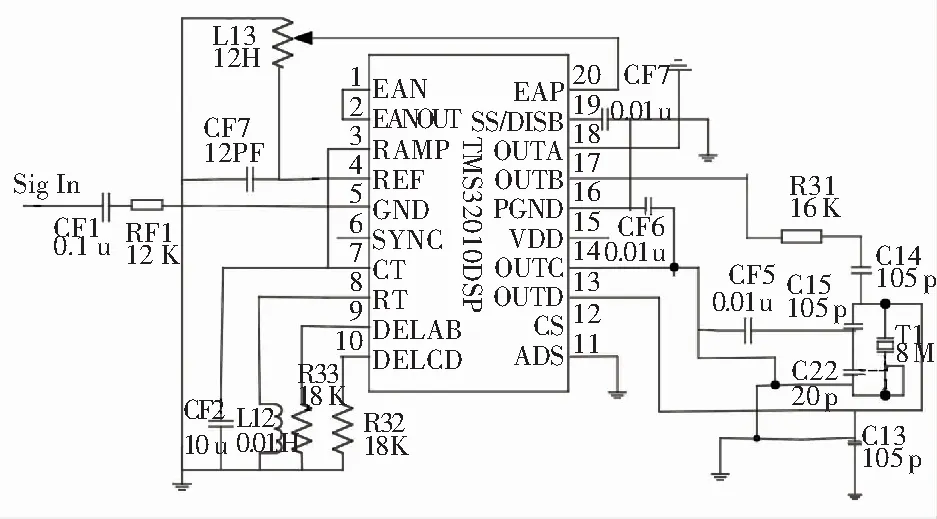
圖4 AD模塊設計Fig. 4 AD module design
2.2.4 人機交互模塊
人機交互模塊采用TRF7960為主控芯片,采用USB接口、RF接口、WIFI接口和GPRS接口進行人機交互,在參數輸入界面輸入加注信息,比如魚雷的型號、批次、參數以及加注量等,結合無線智能終端控制完成人機交互,得到人機交互模塊設計如圖5所示。
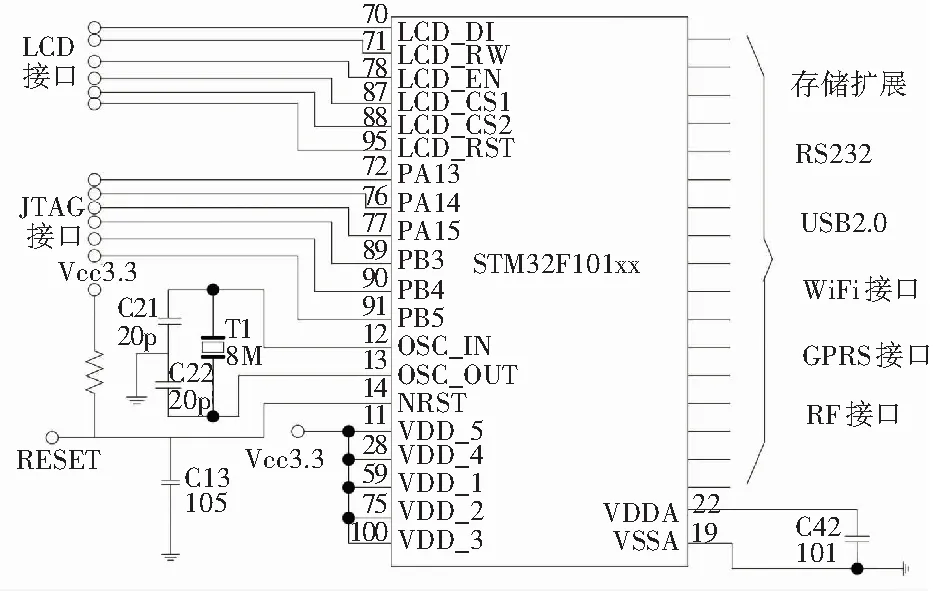
圖5 人機交互模塊電路設計Fig. 5 Circuit design of human-computer interaction module
綜上,完成了奧托-II燃料加注智能控制系統的硬件模塊化設計,并在PCB平臺中實現控制系統電路集成設計。
3 軟件開發及系統調試
采用多線程總線控制技術進行程序加載,實現燃料加注控制系統軟件開發,并在嵌入式環境下進行程序的編輯、編譯和調試,在Visual DSP++集成信息處理平臺中進行系統調試和性能分析,燃料加注系統的控制信號源分別設定為CW波、鋸齒波、三角波和方波四種波形,采樣輸入信號為-4~0 V的10 K脈沖信號,作為燃料加注控制系統的控制脈沖,數據流盤將實時記錄的數據(存放在HPE1562E)傳輸到主控計算機硬盤,在控制面板中輸入燃料加注信息,實現參數配置,如圖6所示。
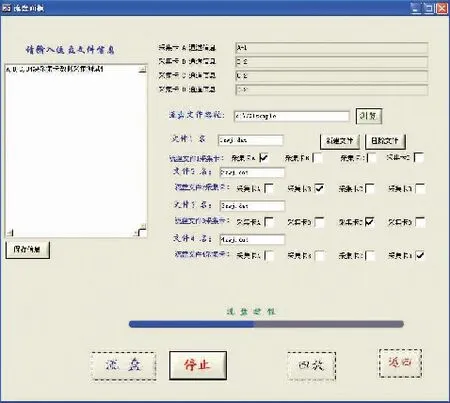
圖6 參數配置界面Fig. 6 Parameter configuration interface
根據圖6的參數配置結果,進行四線程的燃料加注測試,并在人機交互界面觀察加注動態結果,如圖7所示。

圖7 多線程燃料加注控制輸出Fig. 7 Multithreaded fuel injection control output
分析圖7 得知,各個線程的輸出信號穩定性較好,說明加注的平穩控制性能較好,人機交互性能較強,提高了加注的智能性和精準度,在魚雷奧托-II燃料加注智能控制中具有較好的穩健控制能力。
4 結束語
由于奧托-II燃料對人體有一定的毒性危害,為了提高燃料加注的智能性,降低燃料加注的風險,研究一種智能的奧托-II燃料加注系統,提高魚雷轉級的效率。本文設計出基于嵌入式多線程總線控制技術的燃料加注智能控制系統,結合單片機進行燃料加注系統計算機控制,采用多線程總線控制技術進行程序加載,實現燃料加注控制系統的硬件設計和軟件開發。本文設計的奧托-II燃料加注智能控制系統具有較好的穩定性,較強的人機交互性,在熱動力魚雷燃料加注中具有很好的應用價值。
[1] 周勇,甘新年,胡光波,等. 魚雷制導控制系統多通道控制加權算法設計[J]. 現代電子技術,2014,37(19):14-17.
[2] 馬雪. 基于FPGA嵌入式設計的水聲信號采集系統[J]. 艦船電子工程,2017,37(3):135-139.
[3] 胡存剛,胡軍,張云雷,等. 三電平 ANPC 變換器$VPWM 優化控制方法[J]. 電機與控制學報,2016,20(6):32-41.
[4] 甄建軍,張毅,胡光波. 基于螺旋平面線圈的感應電能傳輸技術研究[J]. 電氣自動化,2014,36(2): 78-80.
[5] 郭太平,裘進浩,程軍,等. 高頻電磁渦流檢測系統及實驗研究[J]. 國外電子測量技術,2015, 34 (11):4-9,13.
[6] 張冀,徐科軍. 自動生成轉速參考曲線的電動執行器定位方法[J]. 電子測量與儀器學報, 2014,28(11):1222-1234.
[7] 鄧異,梁燕,周勇. 水聲換能器基陣信號采集系統優化設計[J]. 物聯網技術,2015,5(4):36-37,41.
[8] 劉家亮,王海燕,姜喆,等. 垂直線列陣結構對PTRM陣處理空間增益的影響[J]. 魚雷技術,2010,18(4): 263-267.
[9] 喬翊,馬珺,張建國. 面向混沌光時域反射儀的混沌光源設計[J]. 激光與光電子進展,2017,54(2): 021201(1)-021201(7).
[10]趙威. 強海水混響背景下水中兵器攻擊目標檢測研究[J]. 智能計算機與應用,2016,6(2):51-54.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17