同步磁阻電動(dòng)機(jī)無(wú)位置傳感器控制的自起動(dòng)方法
2018-03-01 06:31:26林衛(wèi)鵬湯寧平章金晶
電氣技術(shù) 2018年2期
林衛(wèi)鵬 湯寧平 章金晶
(福州大學(xué)電氣工程與自動(dòng)化學(xué)院,福州 350108)
同步磁阻電動(dòng)機(jī)相比于其他電動(dòng)機(jī)具有成本低、無(wú)銅耗、效率高、轉(zhuǎn)矩脈動(dòng)小且不存在高溫失磁及弱磁擴(kuò)速難等一系列優(yōu)點(diǎn),是一種十分高效的電動(dòng)機(jī)。
對(duì)于高性能的電動(dòng)機(jī)調(diào)速系統(tǒng)而言,通常需要在轉(zhuǎn)子同軸上安裝機(jī)械式傳感器以用于檢測(cè)轉(zhuǎn)子位置角及轉(zhuǎn)速信息,從而實(shí)現(xiàn)轉(zhuǎn)速、電流雙閉環(huán)控制,但是這也給控制系統(tǒng)帶來(lái)了一系列的弊端[1]。諸如其增加了硬件系統(tǒng)的成本和復(fù)雜性;檢測(cè)信號(hào)也易受外界環(huán)境干擾從而降低了系統(tǒng)的可靠性;同時(shí)在惡劣環(huán)境下,硬件容易受損,進(jìn)一步增加了系統(tǒng)的維護(hù)成本和不穩(wěn)定性。
為此,近年來(lái),無(wú)位置傳感器控制的研究成為了一個(gè)熱點(diǎn)。許多學(xué)者提出了諸如基于電動(dòng)機(jī)凸極效應(yīng)、反電動(dòng)勢(shì)、狀態(tài)觀測(cè)器、滑模觀測(cè)器以及卡爾曼濾波器等一些估算方法[2]。但是由于電動(dòng)機(jī)在起動(dòng)及低速運(yùn)行下,信噪比較低,從而使得上述方法并不能很好地適用于電動(dòng)機(jī)自起動(dòng)及低速運(yùn)行中。因此,文獻(xiàn)[3-5]提出了升壓升頻起動(dòng)方法,但該方法使電動(dòng)機(jī)運(yùn)行于速度、電流均開環(huán)的狀態(tài)下,故電流是不可控的,容易產(chǎn)生過流問題。文獻(xiàn)[6-7]提出了高頻信號(hào)注入法,這種方法需要向系統(tǒng)中持續(xù)注入一個(gè)高頻電流,從而容易引起諧波和轉(zhuǎn)矩脈動(dòng),同時(shí)實(shí)現(xiàn)過程較為復(fù)雜困難,故動(dòng)態(tài)性能并不理想。
針對(duì)上述問題,本文采用了I-f流頻法自起動(dòng)控制策略,該方法在電動(dòng)機(jī)起動(dòng)及低速運(yùn)行階段采用單電流環(huán)的閉環(huán)控制,而在中高速時(shí)平穩(wěn)地切換到基于滑模觀測(cè)器的無(wú)位置傳感器控制,從而實(shí)現(xiàn)同步磁阻電動(dòng)機(jī)在全速范圍內(nèi)的無(wú)位置傳感器控制。
1 同步磁阻電動(dòng)機(jī)的數(shù)學(xué)模型
圖1所示為同步磁阻電動(dòng)機(jī)在αβ 靜止坐標(biāo)系及dq同步旋轉(zhuǎn)坐標(biāo)系中的向量圖。其中us、is分別為定子電壓矢量及定子電流矢量;ψs為定子磁鏈?zhǔn)噶浚沪萺、θi分別為轉(zhuǎn)子位置角、電流角;ωr為同步旋轉(zhuǎn)電角速度;下標(biāo)d、q表示dq軸分量。
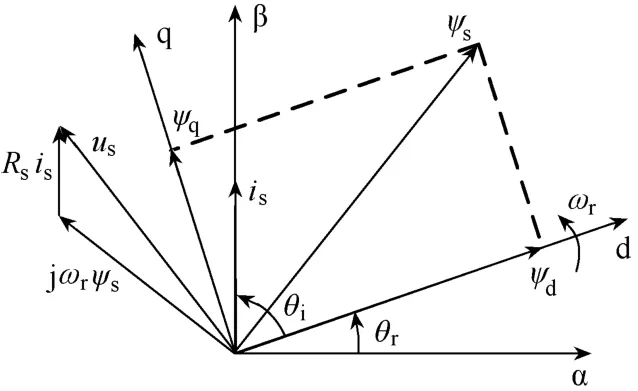
圖1 同步磁阻電動(dòng)機(jī)向量圖
由圖1可得dq同步旋轉(zhuǎn)坐標(biāo)下,同步磁阻電動(dòng)機(jī)電壓方程為

式中,Rs為電動(dòng)機(jī)定子電阻參數(shù);p表求導(dǎo)。磁鏈方程為

式中,Ld、Lq分別為電動(dòng)機(jī)dq軸電感參數(shù)。電磁轉(zhuǎn)矩方程為

式中,Te為電磁轉(zhuǎn)矩,np為轉(zhuǎn)子極對(duì)數(shù)。
同時(shí)又有

電動(dòng)機(jī)的機(jī)械運(yùn)動(dòng)方程為

式中,TL為負(fù)載轉(zhuǎn)矩,J為轉(zhuǎn)動(dòng)慣量,αω為給定加速度。
2 I-f流頻法起動(dòng)控制
由式(6)可知,電動(dòng)機(jī)調(diào)速過程中需要對(duì)電磁轉(zhuǎn)矩進(jìn)行控制。當(dāng)在一定負(fù)載下、對(duì)同步磁阻電動(dòng)機(jī)進(jìn)行加減速控制、以使其運(yùn)行在不同的轉(zhuǎn)速下時(shí),需要有相應(yīng)的電磁轉(zhuǎn)矩。從式(5)可以看出,電磁轉(zhuǎn)矩與定子電流幅值和電流角有關(guān)。因此,只需通過控制定子電流矢量,便可進(jìn)行電動(dòng)機(jī)的調(diào)速控制,從而實(shí)現(xiàn)單電流環(huán)的閉環(huán)控制。其控制系統(tǒng)框圖如圖2所示。
圖 3中假定坐標(biāo)系 dq*模塊為與定子電流矢量旋轉(zhuǎn)速度相同且滯后一定角度的dq*旋轉(zhuǎn)坐標(biāo)系,通過該給定坐標(biāo)系可將給定定子電流矢量分解成dq*分量,從而實(shí)現(xiàn)電動(dòng)機(jī)的解耦控制。角度生成器主要是對(duì)給定頻率進(jìn)行積分以獲得坐標(biāo)變換所需的角度θ*,而給定頻率又是通過給定加速度積分得到。根據(jù)圖3所示的給定定子電流矢量與各坐標(biāo)系間的角度關(guān)系,可得坐標(biāo)變換角為

式中,θf(wàn)、分別為給定定子電流矢量與α 軸及 d*軸的夾角。

圖3 流頻法控制電動(dòng)機(jī)向量圖
3 起動(dòng)過程分析
同步磁阻電動(dòng)機(jī)I-f流頻法起動(dòng)主要包含有3個(gè)階段:①轉(zhuǎn)子d軸初始定位階段;②恒流加速起動(dòng)階段;③恒速降流切換階段[8]。
3.1 轉(zhuǎn)子d軸初始定位
由于電動(dòng)機(jī)在起動(dòng)運(yùn)行之前,轉(zhuǎn)子d軸位置是任意的,從而可能造成電動(dòng)機(jī)無(wú)法正常起動(dòng),為此需要在電動(dòng)機(jī)運(yùn)行前進(jìn)行轉(zhuǎn)子d軸初始定位。如圖4(a)所示,當(dāng)向電動(dòng)機(jī)A相繞組中施加一靜止的電壓矢量時(shí),由于電壓矢量與轉(zhuǎn)子d軸間存在一電流角,從而產(chǎn)生一迫使d軸與A相繞組相重合的力矩。如圖4(b)所示,當(dāng)電流角逐漸減小至0時(shí),電磁轉(zhuǎn)矩隨之降為0,轉(zhuǎn)子d軸被定位在A相繞組上。

圖4 轉(zhuǎn)子初始定位過程

圖5 恒流加速起動(dòng)過程
3.2 恒流加速起動(dòng)
當(dāng)轉(zhuǎn)子初始定位完成后,電動(dòng)機(jī)將進(jìn)入恒流加速階段。如圖5所示,在此階段,需向電動(dòng)機(jī)中通入一幅值恒定的定子電流矢量,并且使該電流矢量以適當(dāng)?shù)男D(zhuǎn)加速度開始加速旋轉(zhuǎn)至給定速度。由式(5)、式(6)可知,當(dāng)電流矢量開始由d軸旋轉(zhuǎn)起來(lái)后,其與轉(zhuǎn)子d軸間的電流角將逐漸增大,從而產(chǎn)生一隨之增大的電磁轉(zhuǎn)矩,直至電磁轉(zhuǎn)矩大于負(fù)載轉(zhuǎn)矩時(shí),電動(dòng)機(jī)開始起動(dòng)加速旋轉(zhuǎn)。在電動(dòng)機(jī)加速至電流矢量頻率時(shí),由于加速度的存在,電動(dòng)機(jī)將繼續(xù)加速運(yùn)行,從而使得電流角和電磁轉(zhuǎn)矩逐漸減小,直至電磁轉(zhuǎn)矩小于負(fù)載轉(zhuǎn)矩,電動(dòng)機(jī)開始減速運(yùn)行。當(dāng)電動(dòng)機(jī)電角速度再次與電流矢量頻率相等時(shí),電流角和電磁轉(zhuǎn)矩再次逐漸增大。這種反復(fù)調(diào)整過程,體現(xiàn)了電動(dòng)機(jī)具有“轉(zhuǎn)矩—功角自平衡”的特性。
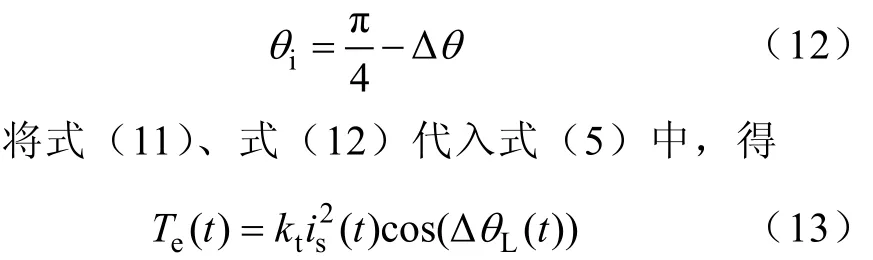
根據(jù)以上分析可得,在定子電流幅值保持恒定下,當(dāng)負(fù)載轉(zhuǎn)矩發(fā)生變化時(shí),電動(dòng)機(jī)將通過改變電流角產(chǎn)生與其相匹配的電磁轉(zhuǎn)矩。由式(5)可知,在電流角θi=45°時(shí),電磁轉(zhuǎn)矩達(dá)到最大,若此時(shí)再加大負(fù)載轉(zhuǎn)矩,則會(huì)使得電流角大于45°,從而導(dǎo)致電磁轉(zhuǎn)矩下降。在這種情況下,電動(dòng)機(jī)將會(huì)發(fā)生失步。因此,為了使電動(dòng)機(jī)能夠在一定的負(fù)載下平穩(wěn)起動(dòng),電磁轉(zhuǎn)矩需要滿足以下條件:

式中,Temax、TLmax分別為起動(dòng)時(shí)刻最大的電磁轉(zhuǎn)矩和負(fù)載轉(zhuǎn)矩。
結(jié)合式(5)、式(8)可知,當(dāng)負(fù)載一定時(shí),給定加速度αω越大,所需的定子電流is越大。
3.3 恒速降流切換
如圖6所示,當(dāng)電動(dòng)機(jī)達(dá)到給定速度時(shí),由于滑模觀測(cè)器估算的轉(zhuǎn)子位置 dest及轉(zhuǎn)速與實(shí)際值間的誤差較小,因此可忽略 d軸與 dest軸間的角度誤差。與此同時(shí),電動(dòng)機(jī)需由流頻法控制切換到基于滑模觀測(cè)器的無(wú)位置傳感器控制。
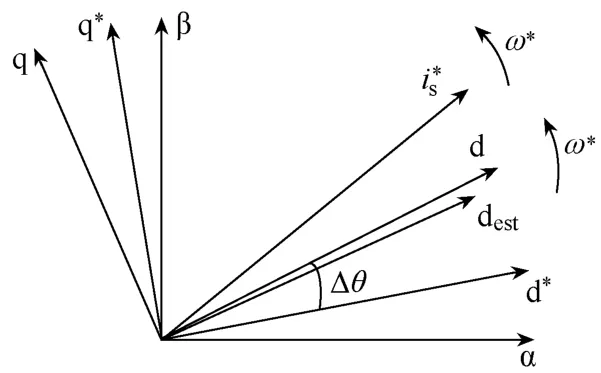
圖6 流頻法控制的電動(dòng)機(jī)穩(wěn)態(tài)運(yùn)行矢量圖
但是,由于流頻法控制是基于dq*假定坐標(biāo)系下的單電流環(huán)閉環(huán)控制,而基于滑模觀測(cè)器的無(wú)位置傳感器控制則是基于dq轉(zhuǎn)子坐標(biāo)系下的轉(zhuǎn)速、電流雙閉環(huán)控制,因此兩者間存在一個(gè)較大的角度差Δθ,如果直接進(jìn)行切換,就會(huì)引起轉(zhuǎn)矩和轉(zhuǎn)速的震蕩。為此,需要先使兩個(gè)坐標(biāo)系相互重合,然后再進(jìn)行兩種控制算法間的切換。這樣才能保證在切換過程中,電動(dòng)機(jī)能夠平穩(wěn)地運(yùn)行。
采用SPSS 23.0對(duì)數(shù)據(jù)進(jìn)行統(tǒng)計(jì)學(xué)分析。計(jì)量資料以表示,Shapiro-Wilk法檢驗(yàn)正態(tài)分布,Levene法檢驗(yàn)方差齊性。當(dāng)數(shù)據(jù)符合正態(tài)分布,且方差齊性時(shí),多組間比較采用單因素方差分析,兩兩組間比較采用LSD-t法檢驗(yàn)。如數(shù)據(jù)非正態(tài)分布或方差不齊,采用非參數(shù)分析Kruskal-Wallis檢驗(yàn)方法。對(duì)于包含兩種處理方式的實(shí)驗(yàn)結(jié)果,采用析因設(shè)計(jì)方法進(jìn)行檢驗(yàn)。α=0.05為檢驗(yàn)水準(zhǔn)(雙側(cè))。
從圖6中可知,兩算法間能否進(jìn)行切換的判斷依據(jù)為兩坐標(biāo)系間的角度差。為了實(shí)現(xiàn)電動(dòng)機(jī)的解耦控制且獲得在電動(dòng)機(jī)穩(wěn)態(tài)運(yùn)行下,兩個(gè)坐標(biāo)系間的角度差,需要對(duì)假定的dq*坐標(biāo)系進(jìn)行初始定位。由于同步磁阻電動(dòng)機(jī)的轉(zhuǎn)矩—功角自平衡穩(wěn)定限制區(qū)域?yàn)閇9]

因此,在轉(zhuǎn)子初始定位時(shí),可假定與定子電流矢量旋轉(zhuǎn)頻率相同且滯后轉(zhuǎn)子 d軸 45°的 dq*旋轉(zhuǎn)坐標(biāo)系,如圖7所示。則兩坐標(biāo)系間的角度差為


圖7 假定坐標(biāo)系dq*的初始定位
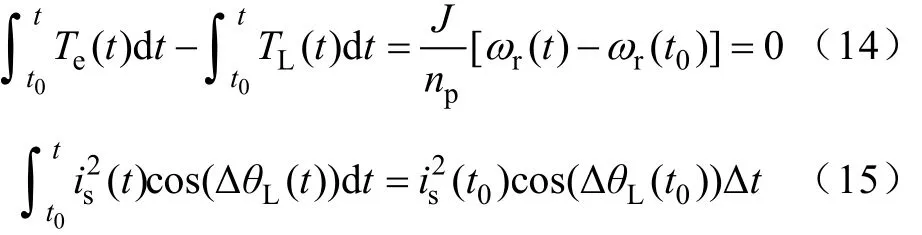
根據(jù)以上對(duì)“轉(zhuǎn)矩—功角自平衡”原理的分析可知,當(dāng)定子電流減小時(shí),電磁轉(zhuǎn)矩隨之減小,在達(dá)到新的轉(zhuǎn)矩平衡前,功角θi隨著轉(zhuǎn)速的減小逐漸增大,從而使得兩坐標(biāo)系間的角度差Δθ 不斷減小。當(dāng)Δθ 減小至某一較小閥值ε 時(shí),、,此時(shí)便可進(jìn)行平順地切換。其切換過程如圖8所示。

圖8 恒速降流切換過程
假設(shè)定子電流線性減小,則有

式中,t0為降流初始時(shí)刻,Ci為降流初始時(shí)刻的定子電流平方值,ki為定子電流下降斜率。
且有
式中,ΔθL(t)=2Δθ(t),kt=3np(Ld?Lq)/4 為常量。
同時(shí),為了簡(jiǎn)化運(yùn)算,可假設(shè)角度差ΔθL以斜率kθ線性減小,即

從式(17)中,可以看出角度差ΔθL的下降速率kθ正比于定子電流幅值is的下降速率ki,因此通過改變ki值,即可控制切換過程的速度。兩算法間能否進(jìn)行平滑切換的另一個(gè)關(guān)鍵條件,就是在角度差Δθ=ε 的同時(shí),電流剛好降到期望值。但是由于機(jī)械系統(tǒng)相比于電氣系統(tǒng)存在一定的響應(yīng)滯后,因此過大的ki會(huì)導(dǎo)致在角度差Δθ 下降為ε 時(shí),實(shí)際電流值已經(jīng)遠(yuǎn)小于所需的期望值,甚至出現(xiàn)負(fù)值,這將引起切換過程中轉(zhuǎn)矩和速度的脈動(dòng)。
為了實(shí)現(xiàn)切換過程的快速性及平穩(wěn)性,本文采用了變ki斜率的方法[10],即在角度差下降到不同階段時(shí),取不同的電流下降斜率。隨著角度差越接近0,ki取值越小,即
式中,k1、k2、k3為定子電流在不同階段的下降斜率且k3<k2<k1;c1、c2分別為角度差下降過程的不同階段。
4 仿真結(jié)果與分析
根據(jù)以上分析,可在Matlab/Simulink仿真平臺(tái)上,搭建如圖9所示的同步磁阻電動(dòng)機(jī)全速范圍內(nèi)的無(wú)位置傳感器控制系統(tǒng)仿真模型。該控制系統(tǒng)采用最大轉(zhuǎn)矩電流比控制,當(dāng)電動(dòng)機(jī)處于起動(dòng)及低速運(yùn)行狀態(tài)時(shí),3個(gè)控制開關(guān)被切換到 2位置,即為I-f流頻法起動(dòng),此時(shí)系統(tǒng)為電流單閉環(huán)矢量控制;而當(dāng)電動(dòng)機(jī)處于中高速運(yùn)行狀態(tài)時(shí),3個(gè)控制開關(guān)被切換到1位置,即為基于滑模觀測(cè)器的無(wú)位置傳感器控制,此時(shí)系統(tǒng)為轉(zhuǎn)速、電流雙閉環(huán)矢量控制。本文采用的基于滑模觀測(cè)器的無(wú)位置傳感器控制主要是先通過滑模觀測(cè)器觀測(cè)得到有效磁鏈,再通過鎖相環(huán)從有效磁鏈中提取出轉(zhuǎn)子位置角及轉(zhuǎn)速信息,從而實(shí)現(xiàn)無(wú)位置傳感器控制。

圖9 全速范圍內(nèi)無(wú)位置傳感器控制系統(tǒng)框圖

表1 同步磁阻電動(dòng)機(jī)參數(shù)
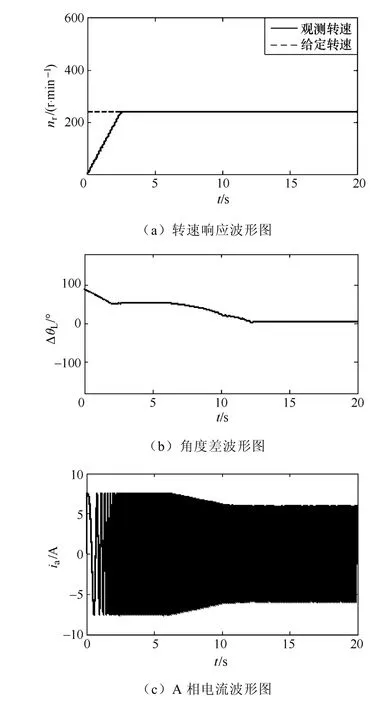
圖10 給定轉(zhuǎn)速50rad/s下,由I-f切換至基于滑模觀測(cè)器的無(wú)位置傳感器控制的響應(yīng)波形圖
所用同步磁阻電動(dòng)機(jī)參數(shù)見表1,仿真中I-f恒流起動(dòng)階段給定的定子電流is為7.6A;負(fù)載轉(zhuǎn)矩TL為 5N·m;起動(dòng)加速度αω為 20rad/s2;角度差閥值ε 為 0.5°;k1、k2、k3、c1、c2分別為 5A/s、1.25A/s、0.5A/s、0.4、0.1。仿真結(jié)果分別給出了在給定轉(zhuǎn)速50rad/s下,由 I-f起動(dòng)切換至基于滑模觀測(cè)器的無(wú)位置傳感器控制及在給定轉(zhuǎn)速1000r/min下,由I-f起動(dòng)至 50rad/s后切換至基于滑模觀測(cè)器的無(wú)位置傳感器控制的響應(yīng)波形圖。由于在仿真環(huán)境下,轉(zhuǎn)子d軸與A相繞組一開始就是相互重合的,即電動(dòng)機(jī)是由 0°初始位置開始旋轉(zhuǎn)的,因此仿真結(jié)果未給出轉(zhuǎn)子d軸初始定位階段的波形圖。
由圖10可以看出,在恒流加速起動(dòng)階段,由于定子電流的閉環(huán)控制,使得其幅值始終維持在給定值7.6A。在電動(dòng)機(jī)進(jìn)入穩(wěn)態(tài)運(yùn)行后,在6s時(shí)開始進(jìn)行恒速降流切換,在此階段隨著相電流的平滑下降,角度差也逐漸減小,而轉(zhuǎn)速一直維持在50rad/s,并未有較大的波動(dòng)。在大約 12.5s時(shí),角度差減小至給定閥值,控制系統(tǒng)由I-f流頻法控制平緩地切換至基于滑模觀測(cè)器的無(wú)位置傳感器控制,切換過程中,轉(zhuǎn)速、角度差以及相電流的脈動(dòng)都較小。
圖11為同步磁阻電動(dòng)機(jī)在I-f流頻法控制下,平穩(wěn)起動(dòng)并加速至50rad/s及在I-f切換至基于滑模觀測(cè)器的無(wú)位置傳感器控制后,電動(dòng)機(jī)迅速加速至給定轉(zhuǎn)速 1000r/min的響應(yīng)波形圖。由仿真結(jié)果圖可以看出,電動(dòng)機(jī)起動(dòng)過程較為平緩并且穩(wěn)態(tài)運(yùn)行時(shí)轉(zhuǎn)速較為平穩(wěn),脈動(dòng)較小;同時(shí)在算法切換后,電動(dòng)機(jī)對(duì)轉(zhuǎn)速突變具有較快的響應(yīng)速度。這表明了在全速范圍內(nèi),同步磁阻電動(dòng)機(jī)無(wú)位置傳感器控制具有較好的穩(wěn)態(tài)及動(dòng)態(tài)性能。
以上仿真結(jié)果與理論分析相符合,表明了將I-f流頻法控制運(yùn)用于同步磁阻電動(dòng)機(jī)無(wú)位置傳感器控制的自起動(dòng)中是有效可行的,其不僅能夠?qū)崿F(xiàn)電動(dòng)機(jī)較為平緩地自起動(dòng),同時(shí)還能夠較為平穩(wěn)地切換至基于滑模觀測(cè)器的無(wú)位置傳感器控制。

圖11 給定轉(zhuǎn)速1000r/min下,由I-f起動(dòng)至50rad/s后切換至基于滑模觀測(cè)器的無(wú)位置傳感器控制的響應(yīng)波形圖
5 結(jié)論
本文利用電動(dòng)機(jī)的“轉(zhuǎn)矩-功角自平衡”特性,通過采用I-f流頻法,實(shí)現(xiàn)同步磁阻電動(dòng)機(jī)無(wú)位置傳感器控制的自起動(dòng)。同時(shí)在定子電流下降的過程中采取了變斜率的方法,使得流頻法控制能夠平穩(wěn)地過渡到基于滑模觀測(cè)器的無(wú)位置傳感器控制,從而實(shí)現(xiàn)同步磁阻電動(dòng)機(jī)在全速范圍內(nèi)的無(wú)位置傳感器控制。仿真結(jié)果可以得到以下結(jié)論:
1)采用I-f流頻法控制,不僅可以實(shí)現(xiàn)同步磁阻電動(dòng)機(jī)無(wú)位置傳感器控制的自起動(dòng),同時(shí)由于對(duì)定子電流進(jìn)行了閉環(huán)控制,因此還可有效地防止在起動(dòng)及切換過程中電流發(fā)生過流。
2)在不同的負(fù)載下,只需調(diào)整適當(dāng)?shù)慕o定加速度及定子電流大小,便可實(shí)現(xiàn)電動(dòng)機(jī)平穩(wěn)地起動(dòng),同時(shí)可有效地防止在起動(dòng)過程中電動(dòng)機(jī)發(fā)生失步。
3)在恒速降流階段,使定子電流采取變斜率的下降方式,可有效地保證切換過程的快速性與平穩(wěn)性。
[1] 吳軒欽, 譚國(guó)俊, 何鳳有, 等. 基于有效磁鏈的電勵(lì)磁同步電機(jī)無(wú)速度傳感器控制[J]. 電工技術(shù)學(xué)報(bào),2016, 31(6): 81-90.
[2] 胡慶波, 孫春媛. 永磁同步電機(jī)全速范圍無(wú)速度傳感器控制[J]. 電機(jī)與控制學(xué)報(bào), 2016, 20(9): 73-79.
[3] 羅隆福, 楊晨, 許加柱, 等. 基于DSP的無(wú)位置傳感器無(wú)刷直流電機(jī)控制[J]. 微電機(jī), 2005, 38(6): 92-93,81, 91.
[4] 湯長(zhǎng)波, 顧敏明, 潘海鵬. 無(wú)位置傳感器無(wú)刷直流電機(jī)啟動(dòng)方法研究[J]. 浙江理工大學(xué)學(xué)報(bào), 2011,28(6): 886-889.
[5] 萬(wàn)曉鳳, 康利平, 鄭博嘉. 無(wú)位置傳感器BLDCM的軟件升頻啟動(dòng)策略[J]. 工程設(shè)計(jì)學(xué)報(bào), 2014, 21(6):596-602.
[6] 劉穎, 周波, 馮瑛, 等. 基于脈振高頻電流注入SPMSM 低速無(wú)位置傳感器控制[J]. 電工技術(shù)學(xué)報(bào),2012, 27(7): 139-145.
[7] 李翠萍, 王新生, 高陽(yáng). 無(wú)位置傳感器永磁同步電動(dòng)機(jī)控制系統(tǒng)[J]. 微特電機(jī), 2007, 35(12): 39-41, 45.
[8] 劉杰. 表貼式永磁同步電機(jī)無(wú)位置傳感器驅(qū)動(dòng)技術(shù)研究[D]. 哈爾濱: 哈爾濱工業(yè)大學(xué), 2014.
[9] 王子輝. 永磁同步電機(jī)全速度范圍無(wú)位置傳感器控制策略研究[D]. 杭州: 浙江大學(xué), 2012.
[10] 王力, 黃科元, 黃守道, 等. 改進(jìn)的永磁同步電機(jī)無(wú)傳感器快速啟動(dòng)方法[J]. 電力電子技術(shù), 2015, 49(7):62-64.
