仿人機械手的觸覺傳感器和關(guān)節(jié)驅(qū)動及控制系統(tǒng)設(shè)計與實現(xiàn)
2018-03-01 00:32:32肖南峰陳星辰
重慶理工大學(xué)學(xué)報(自然科學(xué)) 2018年1期
肖南峰,巢 婭,陳星辰
(華南理工大學(xué) 計算機科學(xué)與工程學(xué)院, 廣州 510006)
仿人機械手作為仿人機器人的末端執(zhí)行器,經(jīng)歷了若干代的發(fā)展,目前已進(jìn)入了相對成熟的發(fā)展階段,但是受其觸覺傳感器和關(guān)節(jié)驅(qū)動及控制系統(tǒng)的影響,仿人機械手執(zhí)行任務(wù)的廣泛性和復(fù)雜性還存在著諸多問題。由于現(xiàn)有的仿人機械手大多采用基于腱的傳動方式和仿效人手的驅(qū)動原理,故存在以下缺點:① 腱的剛度有限;② 必須對腱進(jìn)行預(yù)緊;③ 腱的張力和波動很大;④ 腱的機械特性和數(shù)量對于手的性能有較大影響。此外,一些高檔仿人機械手的控制方法基本上是對手指尖處裝配有獨立力/力矩傳感器的手指進(jìn)行位置和力反饋控制或阻抗控制。但是,這些控制方法均沒有考慮或控制手指和手掌表面上眾多觸覺點(觸覺傳感器)的接觸力影響,這也極大地限制了仿人機械手的推廣普及。
觸覺傳感器是仿人機械手感知外部環(huán)境的重要媒介,它對于仿人機械手正確地操作目標(biāo)物體極其重要。在仿人機械手靈活自如運動的前提下,要求觸覺傳感器能夠準(zhǔn)確地感知外部環(huán)境,以便實現(xiàn)對目標(biāo)物體的各種精準(zhǔn)操作。迄今為止,國內(nèi)外學(xué)術(shù)界對于觸覺傳感器構(gòu)造、柔性敏感材料及其力學(xué)特性、觸覺力數(shù)學(xué)建模和精確解耦等已經(jīng)進(jìn)行了廣泛的探討[1-15],目的是研制出具備多種測量功能的復(fù)合型觸覺傳感器,以便為仿人機械手提供獲取更多外部綜合信息和更加先進(jìn)的觸覺感知技術(shù)。為此,本文設(shè)計了一種具有柔性和觸覺力及觸摸檢測能力的分布觸覺傳感器。同時,還要利用直流步進(jìn)電機作為仿人機械手各個關(guān)節(jié)的驅(qū)動機構(gòu),并且要研制相應(yīng)的單關(guān)節(jié)及多關(guān)節(jié)并發(fā)驅(qū)動控制電路及驅(qū)動控制算法。此外,在考慮手指和手掌表面上眾多觸覺點接觸力的情況下,設(shè)計仿人機械手位置和力反饋及速度反饋控制等方法,以實現(xiàn)仿人機械手的抓、握、捏、夾、推、拉、插、按、剪、切、敲、打、撕、貼、牽、拽、磨、削、刨、搓等靈巧作業(yè)功能。
1 分布觸覺傳感器研究現(xiàn)狀
觸覺傳感器研究始于20世紀(jì)70年代,此后有許多物理傳感器開始應(yīng)用于觸覺傳感領(lǐng)域[1]。觸覺傳感器研究現(xiàn)在所面臨的最大問題在于柔性化、多維觸覺信號檢測及處理、融合方法。目前,國外許多學(xué)者從觸覺感知機理、觸覺傳感材料、觸覺信息獲取、觸覺圖像識別、傳感器實用化等方面進(jìn)行了大量的研究,由此產(chǎn)生了很多新型的觸覺傳感器及觸覺信號處理方法[2-14]。例如,加拿大Simon Fraser大學(xué)Dargahi[2]開發(fā)了由3片PVDF薄膜構(gòu)成的觸覺傳感器;美國德克薩斯克里斯蒂安大學(xué)Kolesar和Dyson[3-4]開發(fā)了覆蓋PVDF薄膜CMOS器件的8×8矩陣傳感器,它能在50 ms內(nèi)掃描64點數(shù)據(jù),很適合于仿人機械手指應(yīng)用,如圖1(a)所示。日本東京大學(xué)Ando和Shinoda[5]利用超聲波原理制作了結(jié)構(gòu)呈柔軟圓球狀的觸覺傳感器,4塊PVDF薄膜片組成的超聲傳感器矩陣鑲嵌在物體重心,如圖1(b)所示。
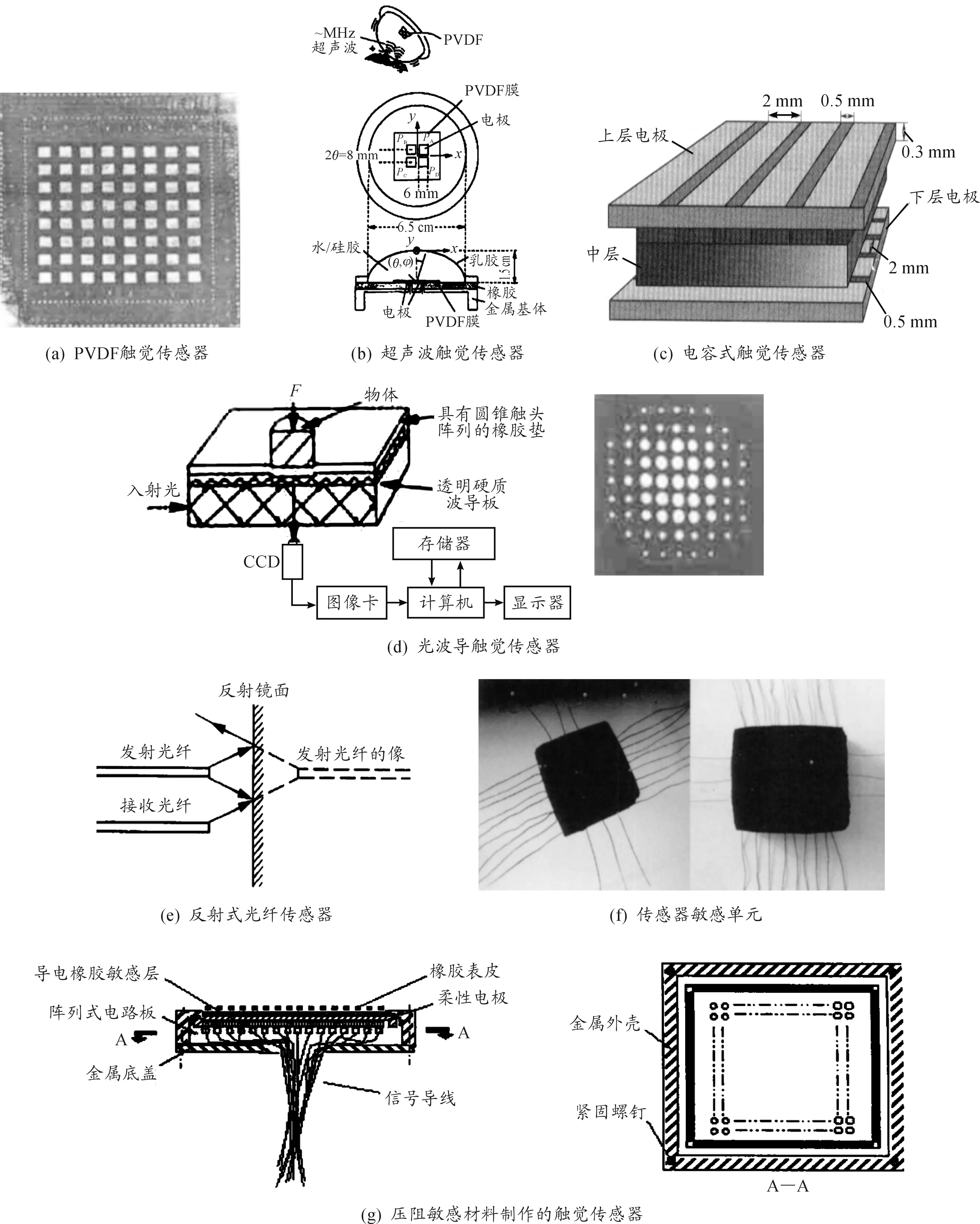
圖1 國內(nèi)外的各類觸覺傳感器
近年來,我國研制成功了以下幾種觸覺傳感器:① 電容式觸覺陣列傳感器[6-7],其原理是通過受力使得極板間相對位移發(fā)生變化,從而使電容發(fā)生變化,通過檢測電容變化量來測量觸覺力,如圖1(c)所示。② 光波導(dǎo)觸覺傳感器[8],其中單向力觸覺傳感器原理如圖1(d)所示,當(dāng)外力F作用于物體時,橡膠墊下部分圓錐觸頭陣列將產(chǎn)生形變,在壓痕處形成光斑,CCD圖像傳感器攝取此光斑圖像并送入計算機對橡膠墊進(jìn)行力學(xué)分析,得到外力F與光斑面積之間的數(shù)量關(guān)系,并檢測法向力大小。③ 光纖式觸覺傳感器[9],其對光纖內(nèi)傳輸?shù)墓膺M(jìn)行調(diào)制使光強度(振幅)、相位、頻率或偏振態(tài)等特性發(fā)生變化,通過測量被調(diào)制過的光信號從而得出被測量,原理如圖1(e)所示。④ 基于導(dǎo)電橡膠的柔性陣列觸覺傳感器[10-12],是由重慶大學(xué)杜彥剛等提出的3維力觸覺檢測傳感器。中國科大徐菲等也采用“整體液體成型”技術(shù)設(shè)計了一種具有柔韌性和測量多維力特征信息能力的多維陣列觸覺傳感器,如圖1(f)所示。⑤ 壓阻陣列觸覺傳感器[13],是由杭州電子工業(yè)學(xué)院羅志增等提出的一種由外層薄橡膠、柔性電極、各向異性導(dǎo)電橡膠敏感層、陣列電極底板以及金屬封裝等組成的壓阻式觸覺傳感器,如圖1(g)所示。
2 分布觸覺傳感器硬件設(shè)計
分布觸覺傳感器是仿人機械手的核心組成部件,它類似于人手的皮膚。本節(jié)利用30個FlexiForce壓力傳感器[14](美國Tekscan公司生產(chǎn)的一種超薄型柔性壓力傳感器)和8個觸摸開關(guān)傳感器[15]來制作分布觸覺傳感器,以增加仿人機械手的觸覺探測范圍和提高探測精度。由于FlexiForce傳感器的壓迫點阻值受壓后發(fā)生變化會產(chǎn)生交變電流,因此采用它來作為各個觸覺點的檢測機構(gòu)。分布觸覺傳感器主要分布在5個手指和1個手掌與被抓取物體的直接接觸點處。本節(jié)設(shè)計分布于5個手指和1個手掌上的所有觸覺點配置及其相互關(guān)系,開發(fā)這些觸覺點的觸覺數(shù)據(jù)信號采集和傳送及融合方法。分布觸覺傳感器設(shè)計主要解決觸覺信號檢測和傳輸及融合等問題。當(dāng)仿人機械手各個手指和手掌上的所有觸覺點配置確定后,要根據(jù)觸覺點和導(dǎo)電機構(gòu)來研制分布觸覺傳感器的檢測控制電路,以及融合和處理來自于各個手指和手掌上觸覺信號的算法。因此,檢測出分布于各個手指和手掌上眾多觸覺點的觸覺信號,融合和處理這些觸覺信號以及各個手指尖處觸覺力反饋是本節(jié)要解決的關(guān)鍵技術(shù)問題。
2.1 仿人機械手的觸覺點配置
為了穩(wěn)定地實現(xiàn)仿人機械手的各種靈巧作業(yè)功能,各個指尖表面采用曲面形式不可欠缺。因此,仿人機械手指外形采用薄鋁板彎曲成平面,在手指尖及指腹部粘上薄塑料片等使其成為曲平面形狀,如圖2(a)所示。這樣仿人機械手指可以像人手指一樣抓握物品及完成各種靈巧的作業(yè)。觸覺傳感器和觸摸開關(guān)傳感器主要分布在仿人機械手的手指指尖和指腹及手掌,以便充分地貼合被抓物體,從而對物體受力情況進(jìn)行感知,實現(xiàn)穩(wěn)定抓取。仿人機械手觸覺點配置為:拇指、食指、中指、無名指、小拇指尖和指腹及指根各設(shè)置1個觸覺傳感器,手掌上設(shè)置4個觸摸開關(guān)傳感器,如圖2(b)所示。
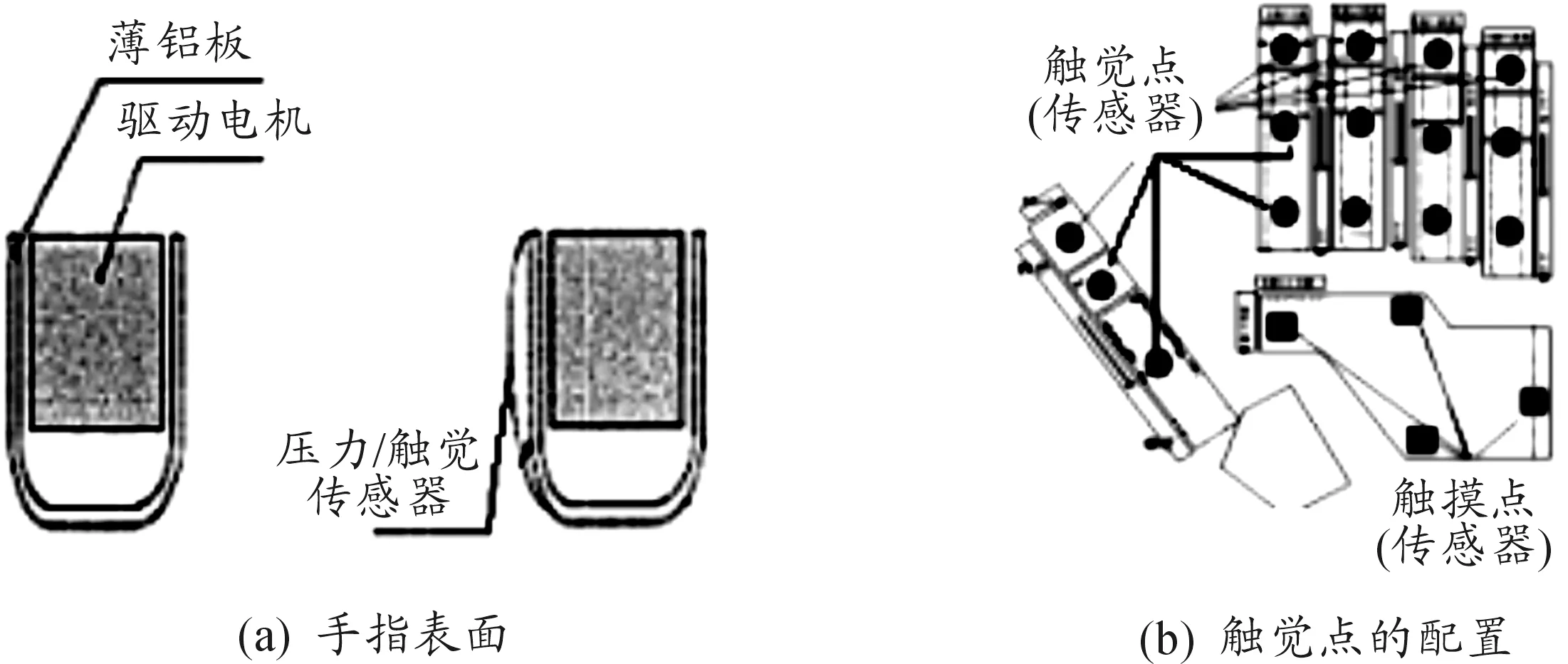
圖2 手指表面觸覺傳感器和觸摸開關(guān)傳感器配置
2.2 壓力和觸摸傳感器結(jié)構(gòu)
FlexiForce壓力傳感器[14]具有紙薄結(jié)構(gòu)、靈活性和力測量能力,可以測量幾乎任何2個表面之間的力,以及更好地力感測性能、線性度、滯后和漂移及溫度敏感性,并且耐用性足以承受大多數(shù)環(huán)境,如圖3(a)所示。它的有效傳感區(qū)域是傳感器末端的圓,由2層基板構(gòu)成,該基板由聚酯膜(或在高溫傳感器情況下為聚酰亞胺)構(gòu)成。在每一層上施加導(dǎo)電材料(銀),隨后施加壓敏油墨層,然后使用粘合劑將2層基底層壓在一起以形成傳感器。在壓敏油墨頂部的銀圓圈限定“有源感測區(qū)域”。導(dǎo)電材料(銀)從感測區(qū)域延伸到傳感器另一端的連接器形成導(dǎo)電引線和可以焊接的方形針腳。此外,每路觸摸開關(guān)傳感器[15]如圖3(b)所示,它是一個基于觸摸檢測IC(TTP223B)的電容式點動型觸摸開關(guān)模塊。該模塊常態(tài)下輸出低電平,模式為低功耗模式;當(dāng)用手指觸摸相應(yīng)位置時,該模塊會輸出+5 V高電平,模式切換為快速模式;當(dāng)持續(xù)12 s沒觸摸時,模式又切換為低功耗模式。每路觸摸開關(guān)傳感器具有如下特點:① 點動型:初態(tài)為低電平,觸摸為高電平,不觸摸為低電平;② 低功耗,供電電源可為2~5.5 V DC;③ 正反面均可作為觸摸面;④ 控制接口有3個引腳,其中GND為地,VCC為供電電源,SIG為數(shù)字信號輸出腳,觸摸區(qū)域類似指紋的圖標(biāo)內(nèi)部區(qū)域,手指輕輕觸摸即可觸發(fā)。
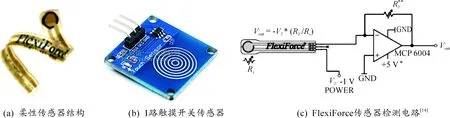
圖3 FlexiForce壓力傳感器和1路觸摸開關(guān)傳感器
2.3 壓力和觸摸信號檢測電路
1) 壓力傳感器檢測電路[14]。將FlexiForce傳感器集成到觸覺力檢測應(yīng)用中的方法是將其結(jié)合到壓力-電壓電路中,將壓力輸出轉(zhuǎn)換為電壓工程單位。根據(jù)設(shè)置可進(jìn)行調(diào)整以增加或降低傳感器的靈敏度。檢測電路如圖3(c)所示,它由-5 V直流電源驅(qū)動。該電路使用反相運算放大器裝置,以基于傳感器電阻Rs和固定參考電阻Rf產(chǎn)生模擬輸出。可以使用模數(shù)轉(zhuǎn)換器將該電壓轉(zhuǎn)變?yōu)閿?shù)字輸出。在該電路中,可以通過改變參考電阻Rf或驅(qū)動電壓VT來調(diào)節(jié)傳感器靈敏度;較低的參考電阻或驅(qū)動電壓將會使得傳感器不太敏感,難于增加其有效力范圍。在圖3(c)中,F(xiàn)lexiForce傳感器的動態(tài)力范圍可以通過改變參考電阻Rf或通過改變驅(qū)動電壓Vout來調(diào)節(jié)。經(jīng)過運算放大器檢出與壓力對應(yīng)的電壓信號Vout后送給(北京瑞博華公司產(chǎn))AD7202板A/D變換器,再由該公司產(chǎn)的IO700板I/O口送PC機進(jìn)行分析和處理及融合,即可檢測、融合、處理所有觸覺點信號,實現(xiàn)仿人機械手的分布觸覺機能。
特別要注意的是,F(xiàn)lexiForce傳感器的整個傳感區(qū)域被視為單個接觸點。為此,施加的負(fù)載應(yīng)均勻地分布在感測區(qū)域上,以確保準(zhǔn)確和可重復(fù)的壓力讀數(shù)。如果負(fù)載分布在感測區(qū)域上變化,讀數(shù)可能會略有不同。注意感測區(qū)域僅是傳感器頂部的銀圓。同樣重要的是傳感器被一致地加載,或每次以相同的方式加載。如果施加的負(fù)載覆蓋區(qū)小于感測區(qū)域,則負(fù)載不應(yīng)該放置在感測區(qū)域的邊緣附近,以確保均勻的負(fù)載分布。確保感測區(qū)域是整個負(fù)載路徑并且負(fù)載不受感測區(qū)域外部的區(qū)域支持也是重要的。FlexiForce傳感器讀取垂直于傳感器平面的力。若是施加“剪切”力的應(yīng)用,則可能會降低傳感器的壽命。如果實際應(yīng)用要在傳感器上施加“剪切”力,則應(yīng)通過采用更具彈性的材料覆蓋來保護(hù)[14]。
2) 一路觸摸開關(guān)檢測電路。由于一路觸摸開關(guān)傳感器的初態(tài)為0電平,觸摸后變?yōu)?5 V高電平,不觸摸時為0電平,所以使用時只需要將其控制接口的3個引腳(GND、VCC、SIG)分別直接與AD7202板I/O端口相聯(lián)接就可檢測出觸摸信號。
3 仿人機械手關(guān)節(jié)驅(qū)動設(shè)計
本節(jié)確定仿人機械手的機械結(jié)構(gòu)與人手的構(gòu)造基本一致[16]。其中,每個手指有3個關(guān)節(jié)(3個自由度),手掌有1個關(guān)節(jié)(1個自由度),整個仿人機械手共有16個關(guān)節(jié)(16個自由度)。各個手指第1關(guān)節(jié)的運動可以實現(xiàn)內(nèi)收和外展,其余關(guān)節(jié)均能完成前屈和翻轉(zhuǎn)運動。仿人機械手的驅(qū)動系統(tǒng)設(shè)計會影響和制約它的機構(gòu)尺寸、驅(qū)動方式、控制系統(tǒng)等方面。為此,仿人機械手采取N驅(qū)動方式,即手指的每一個關(guān)節(jié)對應(yīng)一個電機,每個關(guān)節(jié)單獨用一個電機驅(qū)動可以使手指控制簡便、累積誤差小,抓取穩(wěn)定性好。每根手指關(guān)節(jié)之間的指段采用整體構(gòu)件式設(shè)計,手指為中空形式,由指尖貫穿到指根,所有驅(qū)動電機及其配套減速裝置均嵌入到每個手指的指節(jié)內(nèi)和手掌內(nèi)部。這樣的設(shè)計可使仿人機械手的物理尺寸和結(jié)構(gòu)緊湊、控制方式簡便。
本文選用國產(chǎn)直流步進(jìn)電機[17]作為各個關(guān)節(jié)的驅(qū)動器,各個電機的配置如圖4(a)所示。在5個手指的遠(yuǎn)指節(jié)(遠(yuǎn)指關(guān)節(jié))處分別使用輸出力矩及體積都較小的24BYJ-48型直流步進(jìn)電機作為關(guān)節(jié)驅(qū)動器,如圖4(b)所示。在5個手指的2個指節(jié)(近指節(jié)、中指節(jié))及其指掌關(guān)節(jié)和近指關(guān)節(jié)處與手掌關(guān)節(jié)及拇指根部的2個關(guān)節(jié)處,使用輸出力矩較大的28BYJ-48型直流步進(jìn)電機,圖4(c)所示為其內(nèi)部減速齒輪結(jié)構(gòu)。該電機為4相8拍電機,電壓為DC5V~DC12V。當(dāng)對其施加1個脈沖信號時,對應(yīng)地,步進(jìn)電機的某一相或兩相繞組的通電狀態(tài)將改變1次,轉(zhuǎn)子會轉(zhuǎn)過一定角度(步距角、每個脈沖轉(zhuǎn)角)。24/28BYJ- 48型步進(jìn)電機可控制范圍均為0~360°,步距角是5.625°,完全符合手指關(guān)節(jié)角度范圍及控制精度要求。由于360°/5.625°=64,所以64個脈沖就能步進(jìn)電機轉(zhuǎn)子轉(zhuǎn)1圈。但是,由于電機轉(zhuǎn)子到輸出軸有齒輪減速器連接,減速比為64,那么電機轉(zhuǎn)子轉(zhuǎn)64圈,輸出軸才轉(zhuǎn)1圈,所以需64×64=4 096個脈沖才能使電機輸出軸旋轉(zhuǎn)一圈。
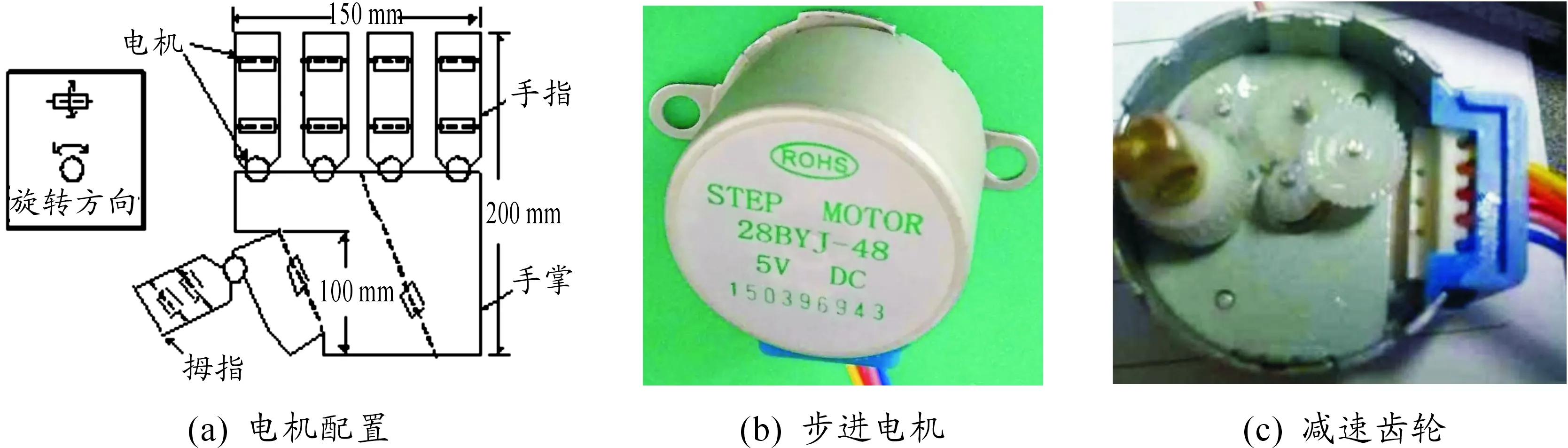
圖4 仿人機械手和手掌關(guān)節(jié)電機配置及驅(qū)動電機
4 仿人機械手控制系統(tǒng)設(shè)計
仿人機械手控制系統(tǒng)分為硬件子系統(tǒng)和軟件子系統(tǒng)[16,18],其結(jié)構(gòu)分別如圖5(a)、(b)所示。圖5(b)中的關(guān)節(jié)驅(qū)動層應(yīng)用單關(guān)節(jié)驅(qū)動算法驅(qū)動單個關(guān)節(jié);并行邏輯驅(qū)動層單獨作為一層,目的是為了不使并行驅(qū)動算法與單關(guān)節(jié)驅(qū)動算法相混淆,以便進(jìn)一步地擴展為多關(guān)節(jié)驅(qū)動算法;邏輯控制層主要包括運動規(guī)劃、手勢控制等應(yīng)用邏輯控制[16-22]。
1) 單關(guān)節(jié)控制算法[16,18]。單關(guān)節(jié)控制算法可為仿人機械手的邏輯控制提供簡單和清晰的控制方式,步進(jìn)電機控制要依據(jù)它的脈沖控制范圍和關(guān)節(jié)角度限制來確定。根據(jù)步進(jìn)電機可控精度得出每個基本脈沖對應(yīng)的角度,由需要角度相對于現(xiàn)有角度的基礎(chǔ)變化值,從而獲得需要發(fā)出脈沖個數(shù)。單關(guān)節(jié)基本控制算法為:① 獲得脈沖控制范圍PWM- Scope =|脈沖寬度上限-脈沖寬度下限|×δ;② 取得關(guān)節(jié)角度控制范圍Angel-Scope=角度上限-角度下限;③ 計算脈沖變化數(shù)PWM-Times=PWM-Scope / Δθ;④ 獲得每個驅(qū)動脈沖的控制精度,基本脈沖角度Basic-Pulse-Angle=Angel-Scope/PWM-Times。其中:脈沖寬度范圍δ是擴大比例因子,放大控制精度,減少累計誤差,實際取δ=10;而脈沖變化數(shù)Δθ是脈沖的變化最小值,通過對步進(jìn)電機測試獲得可以控制的脈沖變化最小值,取Δσ=0.2。通過上面步驟可計算出每個關(guān)節(jié)的控制角度。有了單關(guān)節(jié)電機的基本控制,對單關(guān)節(jié)控制進(jìn)行基本擴展,本節(jié)使用2種方式定位角度:① 絕對角度定位:控制端提供需要定位的關(guān)節(jié)名和角度,底層保證定位界限,并返回定位后角度。② 相對角度定位,在關(guān)節(jié)原有角度基礎(chǔ)上加(減)Δθ度。對于2種控制方式,底層驅(qū)動程序可保證關(guān)節(jié)在所設(shè)的極限位置內(nèi)運動。

圖5 仿人機械手控制系統(tǒng)結(jié)構(gòu)

圖6 單(多)關(guān)節(jié)控制算法
2) 多關(guān)節(jié)并發(fā)控制算法[16,18]。仿人機械手控制要達(dá)到人手的靈巧性還需要優(yōu)化控制算法,即要開發(fā)多關(guān)節(jié)并發(fā)控制算法。因此,控制端提供需要定位的關(guān)節(jié)和相應(yīng)的角度隊列,底層按FIFO序列依次轉(zhuǎn)動關(guān)節(jié)到相應(yīng)角度。在此基礎(chǔ)上有2種控制方式:① 依次到位型控制,每個關(guān)節(jié)先后定位。如圖6(a)所示,依據(jù)關(guān)節(jié)名稱和需要定位的角度,依次驅(qū)動電機定位到相應(yīng)的角度。該控制方式直觀,但很難滿足靈巧性要求。② 依次單位驅(qū)動控制,如圖6(b)所示。這種控制方式中,每個關(guān)節(jié)切分為單位脈沖次數(shù),每次驅(qū)動數(shù)個關(guān)節(jié)的單位角度定位,依次驅(qū)動每個關(guān)節(jié)。這種控制算法可以在一定程度上使仿人機械手的各個手指聯(lián)動和操作靈巧。由于控制角度在精度單位控制內(nèi),故控制方式非常安全。
實際設(shè)置每個指關(guān)節(jié)能屈伸±90°,指尖力為10 N,整個仿人機械手的16個驅(qū)動電機加上觸覺傳感器的總質(zhì)量不超過1 500 g,仿人機械手抓握物品的總質(zhì)量不超過3 kg。并且仿人機械手尺寸大小與成年人的手幾乎一樣,可以很方便地裝在各種機械臂手腕上。本節(jié)將2只完全一樣的仿人機械手(左手、右手)分別安裝到2臺6自由度機械臂(工業(yè)機器人)手腕處,以便最終能夠?qū)崿F(xiàn)雙手和雙腕及雙臂協(xié)調(diào)控制。為此,本節(jié)設(shè)計的直流步進(jìn)電機驅(qū)動電路和AD及IO接口板如圖7(a)、(b)所示。
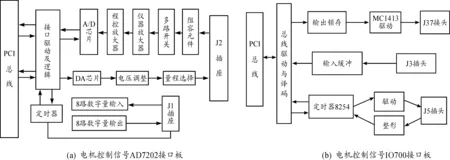
圖7 電機控制信號AD接口板和IO接口板
下面根據(jù)每個手指(配有3個FlexiForce傳感器)反饋的觸覺力和手掌表面的4個觸摸開關(guān)傳感器輸出信號,計算并導(dǎo)出控制仿人機械手的各個手指和手掌關(guān)節(jié)運動的關(guān)節(jié)角和角速度目標(biāo)值,進(jìn)而對各個手指和手掌分別進(jìn)行力和位置及速度反饋控制,以實現(xiàn)仿人機械手的靈巧操作。首先,通過同次變換和代數(shù)學(xué)方法建立仿人機械手的正(逆)向運動學(xué)和正(逆)動力學(xué)及雅可比矩陣,如圖8、9所示。根據(jù)仿人機械手的5個手指和手掌協(xié)調(diào)控制特征,建立各個手指和手掌關(guān)節(jié)的數(shù)據(jù)構(gòu)造和擴展雅可比行列式。接著,根據(jù)每個手指的觸覺力反饋和手掌表面上觸覺點的接觸力,計算并導(dǎo)出控制仿人機械手各個手指和手掌關(guān)節(jié)運動的關(guān)節(jié)角和角速度目標(biāo)值,進(jìn)而對仿人機械手各個手指分別進(jìn)行力和位置及速度反饋等控制,原理如圖10所示。
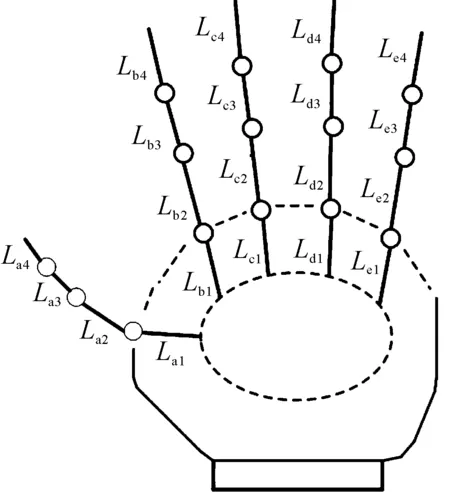
圖8 仿人機械手結(jié)構(gòu)與指關(guān)節(jié)構(gòu)成[16,18]
5 仿人機械手仿真實驗
為了檢驗仿人機械手設(shè)計的有效性和驗證整個仿人機械手的功能,本節(jié)對設(shè)計和實現(xiàn)的仿人機械手進(jìn)行實際測試及仿真實驗。實際測試結(jié)果表明:手指和手掌表面的觸覺傳感器檢測精度高,觸覺信號穩(wěn)定,實時性好,滿足實際需要。同時,手掌表面的觸摸開關(guān)傳感器靈敏度高。仿真實驗系統(tǒng)主要由前面設(shè)計的2個(左手、右手)仿人機械手構(gòu)成,實驗程序由VC++6.0等編寫。仿真實驗是通過建立的正(逆)向運動學(xué)和正(逆)動力學(xué)及雅可比矩陣和力、位置、速度反饋控制算法檢驗2個仿人機械手是否能夠相互協(xié)作完成抓、握、推、夾、托、擠、撕、插、剪、鉗等靈巧作業(yè)。仿真實驗結(jié)果表明:設(shè)計的仿人機械手能有效地完成作業(yè),如圖11所示。

圖11 仿人機械手部分靈巧作業(yè)仿真控制實驗
6 結(jié)束語
本文建立了仿人機械手的數(shù)學(xué)模型和手指及手掌的控制方法,使用直流步進(jìn)電機制作了仿人機械手各個手指和手掌關(guān)節(jié)的驅(qū)動機構(gòu),設(shè)計了分布觸覺傳感器和觸摸傳感器檢測電路,開發(fā)了分布觸覺信息融合和處理算法,實現(xiàn)了仿人機械手的分布觸覺功能。通過實測和仿真實驗證明了所提出的數(shù)學(xué)模型和控制方法及仿人機械手裝置是可行的。其次,建立了仿人機械手的前向(逆向)運動學(xué)方程和動力學(xué)方程及雅可比矩陣,為仿人機械手各個手指關(guān)節(jié)和手掌的協(xié)調(diào)控制奠定了基礎(chǔ)。今后的工作是根據(jù)仿人機械手的協(xié)調(diào)控制特征,控制仿人機械手各個觸覺點的接觸力,并且要將混合型位置和力反饋控制算法、速度反饋控制算法和常規(guī)PID控制算法等用于控制一雙仿人機械手及其手腕和手臂,以便最終實現(xiàn)雙手及其雙腕和雙臂的協(xié)調(diào)控制,完成現(xiàn)抓、握、捏、夾、推、拉、插、按、剪、切、敲、打、撕、貼、牽、拽、磨、削、刨、搓等靈巧作業(yè)功能。
[1] 白韶紅.觸覺傳感器的發(fā)展[J].自動化儀表,1995(5):4-8.
[2] 潘孝業(yè),胡挺,劉鳳臣,等.基于PVDF的欠驅(qū)動多指手滑觸覺硬件系統(tǒng)[J].機電工程,2012(3):318-321.
[3] 秦佳.傳感器在機器人中的應(yīng)用[J].科技與企業(yè),2012(13):340.
[4] 葉偉強.磁流變彈性體壓阻特性測試及應(yīng)用研究[D].寧波:寧波大學(xué),2011.
[5] 趙冬斌,張文增,都東,等.機器人用PVDF觸覺傳感器的國外研究現(xiàn)狀[J].壓電與聲光,2001,23(6):428- 432.
[6] 孫一心,鐘瑩,王向鴻,等.電容式觸覺傳感器信號檢測系統(tǒng)的設(shè)計[J].納米技術(shù)與精密工程,2015(1):28-33.
[7] 沈國偉.電容式觸覺陣列傳感器的原理與設(shè)計[J].傳感器世界,2007(3):13-15.
[8] 潘英俊,付果元.光波導(dǎo)三向力觸覺傳感技術(shù)的研究[J].儀器儀表學(xué)報,2000,21(6):614-617.
[9] 郝華麗.光纖觸覺傳感器的研究[D].大連:大連理工大學(xué),2012.
[10] 王珣.非均勻觸覺傳感陣列數(shù)據(jù)采集系統(tǒng)的研究[D].重慶:重慶大學(xué),2014.
[11] 趙小文,黃英,陸偉,等.一種炭黑-硅橡膠足底壓力分布測量系統(tǒng)[J].華中科技大學(xué)學(xué)報(自然科學(xué)版),2011,(S2):169-171.
[12] 黃鈺,黃英,劉平,等.炭黑/納米 Al2O3 填充柔性壓敏導(dǎo)電硅橡膠體系的研究[J].傳感技術(shù)學(xué)報,2009,22(7):923-927.
[13] 羅志增,張啟忠,葉明.壓阻陣列觸滑覺復(fù)合傳感器[J].機器人,2001(2):166-170.
[14] 瀟瀟雨龍.Flexiforce 傳感器中文技術(shù)手冊[EB/OL].(2017-08-17].[2017-12-24].https://wenku.baidu.com/view/131edbe06294dd88d0d26bdd.html.
[15] FUNCO_小風(fēng).Arduino的基本讀入操作及獲取開關(guān)狀態(tài)(這里以觸摸傳感器為例) [EB/OL].(2017-04-02).[2017-12-24].http://blog.csdn.net/qq_23937195/article/details/68951653.
[16] 李基亮,肖南峰.五指形仿人機械手的設(shè)計與實現(xiàn)及示教[J].計算機工程與應(yīng)用,2008,44(1):193-196.
[17] 嵩陽書院.24BYJ48步進(jìn)電機使用手冊[EB/OL].(2012-12-31).[2017-12-24].http://www.doc88.com/p-909280442094.html.
[18] 韋婷,肖南峰.基于數(shù)據(jù)手套的仿人機械手示教控制系統(tǒng)[J].計算機應(yīng)用研究,2009,30(7):1707-1711.
