基于加速度計的軸系垂直度靜動基座測量方法
2018-02-28 01:28:15柳慧泉郭益德
導航與控制 2018年1期
關鍵詞:測量
柳慧泉,郭益德
(北京航空精密機械研究所,北京100076)
0 引言
精密軸系是平臺式慣導系統的結構基礎,一般采用機電控制方法建立物理機械平臺,導航加速度計和陀螺儀都安裝在該物理平臺上。平臺根據解算方式的不同如半解析式、幾何式和解析式等具有不同物理用途,但都需通過其三根穩定軸(或四軸)模擬一種導航坐標系。機械平臺的軸線回轉精度、軸線垂直度精度作為平臺式慣導系統的重要結構參數,對慣導平臺輸出的加速度、角速度等數據準確度有直接影響。
長期使用過程中,輸出數據精度可能會發生變化,精度的變化可能來源于多方面影響,如陀螺儀加速度計的使用壽命與誤差累積、慣導組件與平臺連接的位置關系、軸系垂直度的輕微變化等等。慣導平臺裝船后,如出現上述情況,需對故障來源進行分析、定位。現有如光電自準直儀法或水平儀法都是基于靜基座條件下,對儀器測量相對位置關系和穩定性有很高要求,并且需要對慣導平臺拆卸。船舶離港后,長時間處于動基座狀態,無法對軸系垂直度精度進行測量,難以實現對故障的定性分析[1]。
加速度計是常用敏感質量測量運載體線加速度的慣性儀表,近年來,隨著相關制造工藝和微電子技術的不斷發展,其測量精度、數據輸出穩定性不斷提高,成本不斷降低。從最早被應用于慣性導航領域,因其高精度和慣性測斜的便捷性開始被用于工程測試技術領域[2]。本文從加速度計慣性測角原理出發,提出了一種基于加速度計的軸系垂直度靜動基座測量方法。該方法根據擾動源假設條件,設置共線加速度計,幾何位置連線通過慣導平臺幾何中心,通過相鄰軸系相互表征的垂直關系,利用靜基座條件下的相鄰軸的角度關系,結合三位置加速度計的輸出,得到動基座條件下的軸系垂直度。并以輸出數據的分散Kalman濾波分析為基礎,垂直度誤差量級定性與定量分析,與模型分析對比,驗證了測試原理與實驗方案的可行性。
1 垂直度測量原理
1.1 垂直度測量方法簡介
兩正交軸線垂直度的測量通常有兩種方法,光電自準直儀法(也稱光管法)和水平儀法[3]。軸線1繞軸線2轉動180°, 則軸線1由位置A°A′°變到A1A′1。測量軸線轉位前后的夾角,即可得到兩倍的垂直誤差角2θ,如圖1所示。
上述兩種方法動基座條件下均無法滿足測量垂直度需求。自準直儀法主要缺陷是由測量原理導致的,平臺裝船后各框架處于聯動狀態,不對其拆解難以獲得足夠的測量空間;水平儀法則依賴于靜基座的環境條件,動基座下的擾動誤差無法消除[4]。
1.2 靜基座模型測量方程
對于三軸加速度模塊,敏感當地重力加速度g時,做等價變換,假設三軸輸出值為一向量。該向量保持相對慣性坐標系的位姿不變,平臺框架坐標系視為隨動,因此加速度計中心在坐標系原點的空間轉動可分解為平臺框架坐標系繞三軸的依次轉動,轉動次序決定旋轉矩陣(矩陣連乘值與次序有關),計算中內框垂直度[5]。
加速度計模塊可以獨立調節具有指定輸出的位置,設內框軸與中框軸成角α2的垂直度。設此時處于框架幾何中心的加速度計模塊輸出為理想狀態下的(0,0,1),則其與內框軸的偏角和α2相等。旋轉過程中,模塊先繞z軸旋轉α2,使其自身隨動的x軸與內框軸重合,然后繞內框軸(此時的x′軸)旋轉 180°, 最后繞z′軸回轉角α2, 即-α2。轉換矩陣的乘積表示此時為模塊的實際位置,設α2=t, 系數矩陣滿足:
t為理論上模塊處于絕對鉛垂位置時,測得的內框軸線與鉛垂線之間垂直度夾角。測量方程為:
y1-βy= 2sintcost(x-βx)+(cos2t-sin2t)(y-βy)
其中,內框做180°旋轉的理論依據如下所示。
當t=0時,有:
旋轉180°,可以由解出的z軸零偏值計算旋轉前后不變的y軸零偏βy。在t的求解中,對應在y的輸入輸出中消除y軸零偏。
中框旋轉確定相對偏角:
軸線垂直度α=t-β。
1.3 動基座模型與測量方程
動基座狀態下,縱向、橫向搖擺和艏搖擺動等動力學狀況對船體影響簡化為外界干擾,對慣導平臺而言,簡化為無數個以無窮遠為定點的剛體有限轉動。可視為等剛體的轉臺軸系結構在出現外加擾動偏角和外力矩施加產生的角加速度情況下,具有自身結構中任意位置的等傾斜角度φ和角加速度?→。通過安置在同軸線兩側相對中心完全對稱的加速度計模塊,利用幾何關系在數據采集過程中解算并消除其對中心加速度計的動態影響[7]。
幾何模型滿足:
其中,P1和P2分別為兩側加速度計到擾動點距離,L為兩加速度計擺放間距,BF為中心加速度計到擾動點距離。
2 實驗條件與驗證方法
實驗選用MEMS三軸加速度模塊以及Freescale MPU6050,以三軸轉臺作為實驗平臺。分辨率6.1×10-5g,加速度計測量精度為1×10-3g。部分參數如表 1 所示[8]。
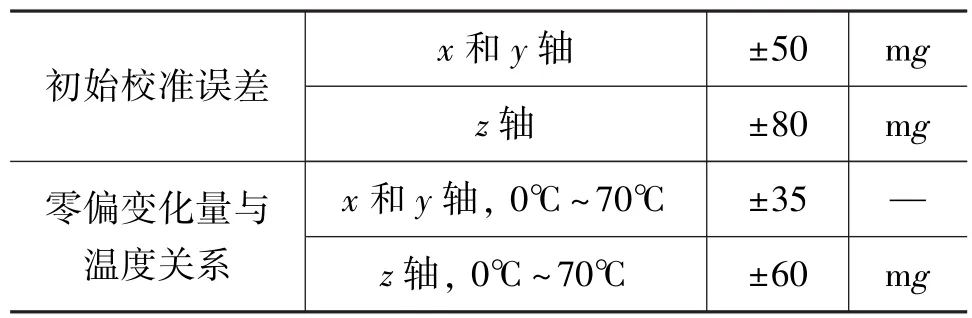
表1 加速度模塊零偏值列表Table 1 Output of accelerometer module zero-g
數據采集和解算平臺為基于Labview2012的上位機三軸數據采集系統,如圖2所示。
3 數據濾波處理與誤差模型分析
3.1 數據離散Kalman濾波
以Labview設計的實時采集平臺,添加了Kalman濾波功能的Matlab模塊。IMU單元輸出頻率為50Hz的離散數據信號,簡化過程噪聲Wk和測量誤差Vk為 Gauss白噪聲(正態分布)[9], 狀態方程為:
測量方程為:
其中,P為狀態轉移矩陣,Wk、Vk為白噪聲,ugy為數據傳輸頻率。考慮Kalman增益,有:
給定初始化濾波參數p(1),預估最優化輸出數據s(1)。以t=0時的128個輸出數據樣本的優化為例,Kalman濾波結果與原始輸出數據對比如圖3所示。
按上述實驗方法,靜基座條件下垂直度536″,動基座條件下垂直度620″。
3.2 誤差模型分析
MPU6050加速度計誤差系數隨溫度和時間變化,考慮其綜合精度和實驗目的[10],對于其標度因數,采用設備提供方的參考數據,不再單獨測定和計算。輸出量程為±2g時,綜合誤差η=3.1831×10-4g,數據采集誤差為4.4153×10-4g。
以Δt代入變換矩陣:
實驗數據代入M和N。
綜合誤差為:δt=226.84″。
4 結論
對動基座條件下的測量方法,由靜動基座條件下計算得到的數據結果對比,兩次測量差值為84″。以動基座數據讀取開關中設計的0.008g為擾動加速度基本單位計算,1×10-2g的輸出變化量解算出的誤差值應為103″量級,實際測量遠小于該值,證明通過幾何共線,兩側附加加速度模塊對中心加速度模塊進行數據補償方法是可信的。
受實驗用設備精度制約,由前述誤差合成分析可知,1×10-3g的IMU單元輸出精度可以測量的垂直度精度在102″。不難分析,如采用精度為1×10-5g甚至更高的加速度計,如石英撓性加速度計等設備,最終精度可以達到1″數量級。該測試方法能夠滿足現有垂直度測量精度需求。
[1]張崇猛,蔡智淵,舒東亮,等.船舶慣性導航技術應用與展望[J].艦船科學技術, 2012, 34(6): 3-8.ZHANG Chong-meng, CAI Zhi-yuan, SHU Dong-liang, et al.Application and prospect of ship inertial navigation technology [J].Ship Science and Technology, 2012, 34(6): 3-8.
[2]張輝,柴偉,羅強,等.三軸加速度傳感器安裝誤差標定方法研究[J].傳感技術學報, 2011, 24(11):1542-1546.ZHANG Hui, CHAI Wei, LUO Qiang, et al.Research on calibration method for the installation error of three-axis acceleration sensor [J].Chinese Journal of Sensors and Actuators, 2011, 24(11): 1542-1546.
[3]GJB 1801-1993,慣性技術測試設備主要性能測試方法[S].北京:國防科學技術工業委員會,1993.GJB 1801-1993,Testing methods of major performance for testequipments ofinertialtechnology [S].Beijing:National Defense Science and Technology Industry Committee,1993.
[4]蔣效雄,劉雨,蘇寶庫.高精度加速度計重力場標定試驗方法[J].吉林大學學報, 2010, 40(1): 287-292.JIANG Xiao-xiong, LIU Yu, SU Bao-ku.Calibration test method of high-precision accelerometer in gravitational field [J].Journal of Jilin University Engineering and Technology Edition, 2010, 40(1): 287-292.
[5]郭敏,尹光洪,田曦,等.基于三軸加速度計的傾斜角傳感器的研究與設計[J].現代電子技術,2010,33(8): 173-177.GUO Min, YIN Guang-hong, TIAN Xi, et al.Research and design of tilt-angle sensor based on three-axis accelerometer[J].Modern Electronics Technique, 2010, 33(8): 173-177.
[6]顏苗,翁海娜,謝英.系統參數標定以及慣性元件安裝誤差測量與補償技術研究[J].中國慣性技術學報,2006, 14(1): 27-29.YAN Miao, WENG Hai-na, XIE Ying.Calibration for system parameters and scaling for installation errors of IMU [J].Journal of Chinese Inertial Technology, 2006,14(1): 27-29.
[7]Reed T.Consultant milli sensor systems & actuators, Inc(MSSA, Inc.), future guidance, navigation & control issues [C].17thBiennial Guidance Test Symposium Holloman Air Force Base, New Mexico, 1995: 42-60.
[8]InvenSense.MPU-6000 and MPU-6050 product specification revision 3.1 [EB/OL].http: //www.doc88.com/p-74889 76195517.html,2011.
[9]Foxlin E.Inertial head-tracker sensor fusion by a complementary separate-bias Kalman filter [C].Proceedings of VRAIS'96,IEEE,1996: 185-194.
[10]Marins J L, Yun X, Bachmann E R, et al.An extended Kalman filter for quaternion-based orientation estimation using MARG sensors [J].IEEE/RSJ International Conference on Intelligent Robots & Systems, 2001, 4(4):2003-2011.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00