基于ARM的動態傾角傳感器
2018-02-26 04:46:44杜秋宇張方超程思堯康二兵
電子技術與軟件工程 2018年14期
杜秋宇 張方超 程思堯 康二兵
摘要?動態傾角傳感器的功能主要體現在運動狀態下傾角測量的實時性與跟隨性,本文采用ADIS16485慣性組合測量單元、STM32F107微控制器為核心設計了一種動態傾角傳感器,通過對傳感器數據讀取、處理、融合等解算出姿態信息,利用CAN口通信將解算數據發送至PC機,實現對載體姿態的實時顯示。文中采用的數據融合技術彌補了不同傳感器之間的誤差,提高了動態傾角傳感器的測量精度。
【關鍵詞】加速度計 角速度計 動態傾角傳感器 ARM
隨著武器系統的更新換代,新的測控理念大量應用,原有用于靜態測量的傾角傳感器逐漸出現局限性,如測量范圍小、響應時間長、運動環境下無法實時響應等,現急需動態環境測量的傾角測量設備。
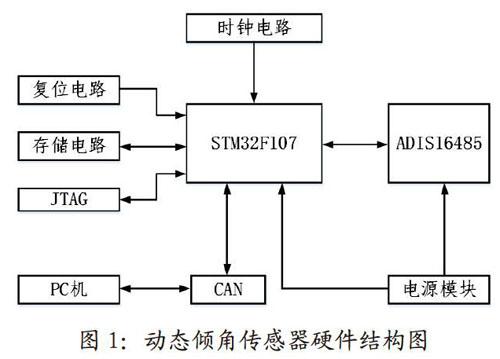
1 動態傾角傳感器硬件設計
動態傾角傳感器測量單元為ADIS16485,控制電路以ARM單片機STM32F107為核心設計,硬件電路結構框圖如圖1所示,主要包含電源模塊、微處理器電路、通訊接口電路和存儲電路。
2 動態傾角傳感器軟件設計
動態傾角傳感器軟件主要實現數據讀取、濾波、姿態解算、信息融合、角度輸出等功能,軟件運行時,首先進行初始化,完成傳感器、外圍器件及系統的初始化,通過外部SPI接口讀取傳感器數據,對讀取數據進行濾波,獲取傳感器初始姿態,然后判斷載體是否運動,如果判斷載體進行了運動,整個姿態更新解算模塊就開始啟動,進行姿態角更新,而后進行卡爾曼濾波進行信息融合,最終輸出姿態角信息。
下面對軟件濾波技術、姿態解算、信息融合三個核心部分進行詳細介紹:
2.1 濾波技術
配置傳感器ADIS16485時參照功能控制寄存器,使得寄存器啟動Y軸的濾波器器組D,同理也相應的配置X,Z軸陀螺儀的FIR濾波器,這樣從寄存器讀出的三軸陀螺儀數據就是經過了低通濾波去除高頻白噪聲的信號,對傳感器的輸出信號進行初步降噪。
為了進一步提高采樣數據精度,對讀取的采樣數據繼續做了一個均值濾波,讀10組數據后做均值處理,每組數據包含了三軸陀螺儀數據,三軸加速度計數據,讀完10組后算成一組傳感器數據。
2.2 姿態解算
姿態解算模塊是整個軟件的核心部分,包括傳感器的初始對準,初始四元數轉化,四元數更新,卡爾曼信息融合,四元數轉換姿態角等模塊。
姿態解算流程為采用粗對準解算初始姿態,計算初始四元數,然后讀取三組三軸陀螺儀數據,計算新四元數,提取四元數更新作為狀態變量,結合初始四元數進行卡爾曼信息融合,獲取最新姿態信息。
傳感器正常上電后,內部寄存器就會按照設定的更新速率保存獲得的角速度、線速度信息,STM32F107通過外部SPI接口讀取這些參數進行實時姿態解算。
2.3 數據融合
由于從陀螺儀的角速度獲得角度信息,需要經過積分運算。如果角速度信號存在微小的偏差,經過積分運算之后,變化形成積累誤差。這個誤差會隨著時間延長逐步增加,最終導致電路飽和,無法形成正確的角度信號,進而保證不了動態傾角傳感器實時角度的可靠性和精度。選用卡爾曼濾波技術進行加速度計和角速度的信息融合,利用加速度計靜態下的優勢彌補角速度計的積累誤差。
3 試驗結果
3.1 靜態測試
將產品置于光柵分度頭上,通過CAN分析儀與計算機相連,上電后產品將角度數據發送至PC機,通過CAN調試軟件讀取數據。動態傾角傳感器常溫線性度及重復精度的測試結果:常溫+25℃,線性度0 240,重復精度0.030。
3.2 動態測試
車體和船體的搖擺周期通常為數秒到數十秒,頻率為0.5Hz以下,姿態變化在10°左右范圍,因此采用高精度位置、高精度速率轉臺模擬船體的典型運動狀態,俯仰角在±10°。內進行0.5Hz的正弦搖擺,同時轉臺橫滾角在±10°內進行0.5Hz的正弦搖擺,以此考核動態傾角儀的測試精度。
由于轉臺所模擬的角度變化為俯仰角在±10°內進行0.5Hz的正弦搖擺,同時轉臺滾轉角在±10°內進行0.5Hz的正弦搖擺,其數學模型如式1~3所示:
θ=10°sm(2π×0.5t+ψpitch_i) (1)
γ=10°sin (2πx0.5t+ψroll_i) (2)
考慮到測試數據中的誤差項,采用一階傅里葉級數模型進行數據擬合:
f(t) =a0+alsin2πft+blcos2πft (3)
橫滾角和俯仰角測試結果擬合時選擇95%置信區間,動態傾角傳感器動態測試結果橫滾角測量誤差0.0575°,俯仰角誤差0.4421°。
4 結論
利用數據融合算法設計的互補濾波器,有效去除加速度計動態情況下的干擾和陀螺儀累積漂移誤差,選擇合適的測試模型,得到比較準確的動態角度值,確定了該動態傾角傳感器測量的準確性。
參考文獻
[1]何秀鳳,袁信,汪淑華.Kalman濾波技術在磁航向和捷聯慣性組合系統初始對準中的應用[J].南京航空航天大學學報,1995 (06):363-369.
[2] Kalman R E.A New Approach to Linearfiltering and Prediction Theory[J].Trans. ASME. Journal of BasicEng,1960,82D: 35-46.