長合成孔徑時間多普勒解模糊成像處理算法
2018-02-13 10:02:24許成君段化軍鄭慶利
無線電工程 2018年11期
許成君,段化軍,鄭慶利
(1.中國人民解放軍91404部隊,河北 秦皇島 066000; 2.中國人民解放軍91604部隊,山東 煙臺 265701)
0 引言
因機載合成孔徑雷達(Synthetic Aperture Radar,SAR)[1-3]是脈沖發(fā)射或接收體制,在方位向以一定大小的PRF發(fā)射頻率來發(fā)射脈沖,通常回波信號的寬帶大小等同于天線方向圖主瓣波束的3 dB寬度。因此,以脈沖重復(fù)頻率(Pulse Repetition Frequency,PRF)的值為采樣頻率對回波信號方位向進行采樣,高于PRF的多普勒頻譜將會被折疊在方位帶寬上,同主信號重疊形成多普勒模糊,在利用匹配濾波器進行成像處理之后,得到的SAR圖像就會出現(xiàn)方位向上的“虛像”,這就是方位向“欠采樣”造成的[3-6]。因此,為滿足機載SAR寬場景測繪的高分辨率成像要求,就必須有效解決方位模糊問題。
19世紀末20世紀初,科研工作者主要通過分析雷達回波信號模糊特性的模型,采用一系列濾波器的方法來濾除掉模糊分量而保留有用信號。Zhang Z在2001年第一次提出了采用3個濾波器來抑制因PRF采樣率不夠造成的多普勒模糊算法[7]。Goodman NA通過深入分析回波信號模糊特性,采用一種基于最大似然理論和最小均方誤差準則設(shè)計濾波器來抑制回波信號中存在的模糊信號[8]。Guarnier AM在2005年提出一種基于自適應(yīng)的多普勒模糊抑制方法[9],該方法的核心內(nèi)容是設(shè)計基于維納最小均方誤差準則的帶通濾波器來濾除混疊到多普勒頻譜內(nèi)的模糊分量。從上述3種方法分析可知,利用濾波器方式固然可以濾除模糊,但面對復(fù)雜多變的環(huán)境以及算法本身的局限性上述3種方法抑制效果并不理想。
目前研究人員已經(jīng)提出多種有關(guān)方位多通道設(shè)計系統(tǒng),該類系統(tǒng)以單相位或多相位區(qū)分點來分類多通道SAR系統(tǒng),其中方位向采用多相位中心的多通道SAR系統(tǒng)是現(xiàn)在國內(nèi)外應(yīng)用最廣的體制之一。Wang T在2006年提出在多通道SAR系統(tǒng)中利用旁瓣雜波與噪聲系數(shù)的指標來評價最小二乘法(Least Square,LS)方法信號重建的性能,定量地分析了雜波以及噪聲對LS方法的影響[10],說明了LS方法能有效抑制多普勒模糊同時提高了系統(tǒng)效率。但該方法存在缺點有一方面沒有將旁瓣雜波和回波信號中的加性噪聲做分開處理,另一方面也沒有合理解決帶寬對成像質(zhì)量的影響。2009年,Gebert N針對方位多通道SAR系統(tǒng)主要研究分析了信噪比與方位模糊比2個主要參數(shù)對觀測矩陣求逆方法的影響[11],該算法是從信號處理角度出發(fā)通過子帶濾波和多通道重構(gòu)來消除方位模糊,但并未考慮載機速度誤差以及多余的副瓣模糊分量問題。Krieger G還提出了一種基于相位中心偏置(Displaced Phase Center,DPC)的多波束技術(shù)來抑制方位多普勒模糊算法[12],該算法能利用多通道的優(yōu)勢來抑制多普勒模糊,但容易受陣列誤差的影響,因而系統(tǒng)穩(wěn)健性較差。此外,還有一種基于空時自適應(yīng)處理(Space-Time Adaptive Processor,STAP)技術(shù)抑制多普勒模糊的算法[13],該算法能自適應(yīng)地對多普勒模糊能量抑制。但是該算法在載機速度有誤差時或通道有誤差時將會導(dǎo)致導(dǎo)引矢量失配問題。
基于上述分析可知,盡管方位多通道SAR系統(tǒng)為寬場景測繪帶來了便利,但多波束SAR系統(tǒng)卻面臨著許多系統(tǒng)問題,諸如信號相消問題、方位非均勻采樣問題、副瓣模糊分量的干擾問題和載機運行速度誤差等問題。本文主要針對長合成孔徑條件,研究了長合成孔徑時間多普勒解模糊成像算法。由于飛機在整個飛行過程中速度不穩(wěn)定,因此,在處理過程中將其分為若干個子孔徑,在每個子孔徑內(nèi)載機速度可以被認為是穩(wěn)定的,對每個子孔徑分別進行處理最后再將其合成。對實測數(shù)據(jù)處理的結(jié)果驗證了該方法的有效性。
本文主要分析了長合成孔徑時間多普勒方位模糊特性;介紹了長合成孔徑時間多普勒解模糊成像算法;通過實測數(shù)據(jù)處理驗證了提出算法的有效性和實用性;并進行總結(jié)。
1 機載多通道SAR方位模糊信號特性分析
1.1 機載多通道SAR回波信號
在機載多通道SAR系統(tǒng)[14-16]中,通常采用各個接收通道線性排列并與載機運動方向平行。本報告假定機載雷達天線陣列為均勻線陣的情況,機載SAR幾何構(gòu)型如圖1所示,天線陣元個數(shù)為N,載機以速度V沿x軸勻速飛行,成像區(qū)中目標點P到飛行航向的垂直距離為R0。
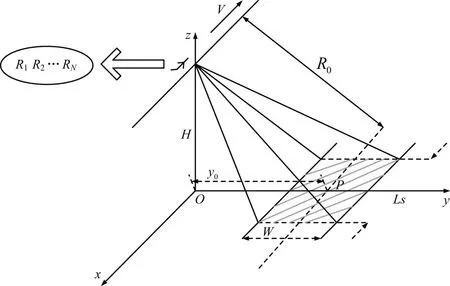
圖1 機載SAR幾何構(gòu)型
假設(shè)在方位t時刻發(fā)射陣元的位置為x=Vt,則此時目標與第n個接收陣元的瞬時斜距為Rn(t),可表示為:
n=1,…,N,
(1)

(2)
式中,τ為距離維時間;λ為雷達發(fā)射波的波長;Kr為線性調(diào)頻信號的調(diào)頻斜率。
1.2 方位模糊特性分析
在寬測繪帶機載SAR的系統(tǒng)設(shè)計中,一般采用較高的脈沖重復(fù)間隔來保證回波信號避免產(chǎn)生距離模糊,這就意味著更寬的測繪帶需要更低的PRF。但是由于SAR系統(tǒng)在方位向的數(shù)據(jù)采集過程實際上就是以PRF在方位向上進行采樣,因而采樣頻率需要滿足奈奎斯特采樣定律,即PRF要大于回波信號的多普勒帶寬Bα,否則將造成方位欠采樣問題。因此當滿足寬測繪帶的要求,必然導(dǎo)致系統(tǒng)的PRF往往不能滿足奈奎斯特采樣定律,這就造成了信號方位向上采樣頻率不夠,引起頻譜混疊現(xiàn)象,最終在成像處理中得到虛假目標,甚至影響成像的質(zhì)量。
機載SAR的回波信號多普勒頻率fd與方位角θ滿足:
(3)
當PRF要大于回波信號的多普勒帶寬Bα時,多普勒頻率與空間角之間為線性關(guān)系如圖2(a)所示,在系統(tǒng)的脈沖重復(fù)頻率與多普勒帶寬滿足關(guān)系PRF=Bα/3時,本應(yīng)該分布在整個[-Bα/2,Bα/2]范圍內(nèi)的回波頻譜卻混疊在[-PRF/2,PRF/2]內(nèi),從而造成了在[-PRF/2,PRF/2]頻譜范圍內(nèi)的任意頻率點具有3個值,不再與sinθ是一一對應(yīng)的關(guān)系,如圖2(b)所示。
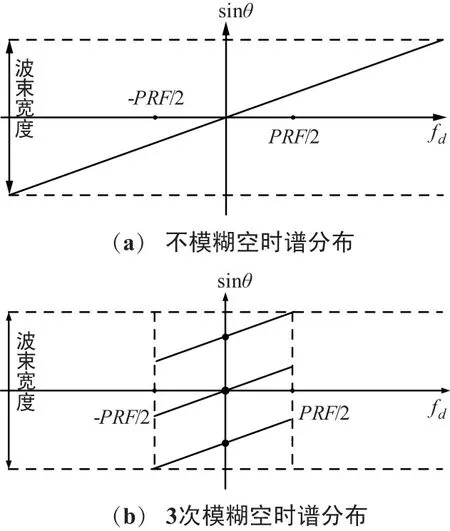
圖2 頻率空間關(guān)系對比
為進一步展示方位模糊情況,現(xiàn)給出存在多普勒模糊和無多普勒模糊的SAR點目標仿真圖,如圖3所示。設(shè)定仿真中PRF值為210 Hz,回波信號多普勒帶寬為628 Hz,即脈沖重復(fù)頻率與多普勒帶寬滿足存在多普勒模糊時關(guān)系式PRF=Bα/3。方位無模糊結(jié)果剖面圖如圖3(a)所示。因此在實際情況中,由于方位上欠采樣原因,往往造成了方位若干次模糊,這將嚴重降低了SAR成像質(zhì)量;由于方位欠采樣原因,回波信號經(jīng)脈沖壓縮后主瓣兩邊對稱的位置出現(xiàn)虛假目標,如圖3(b)所示。
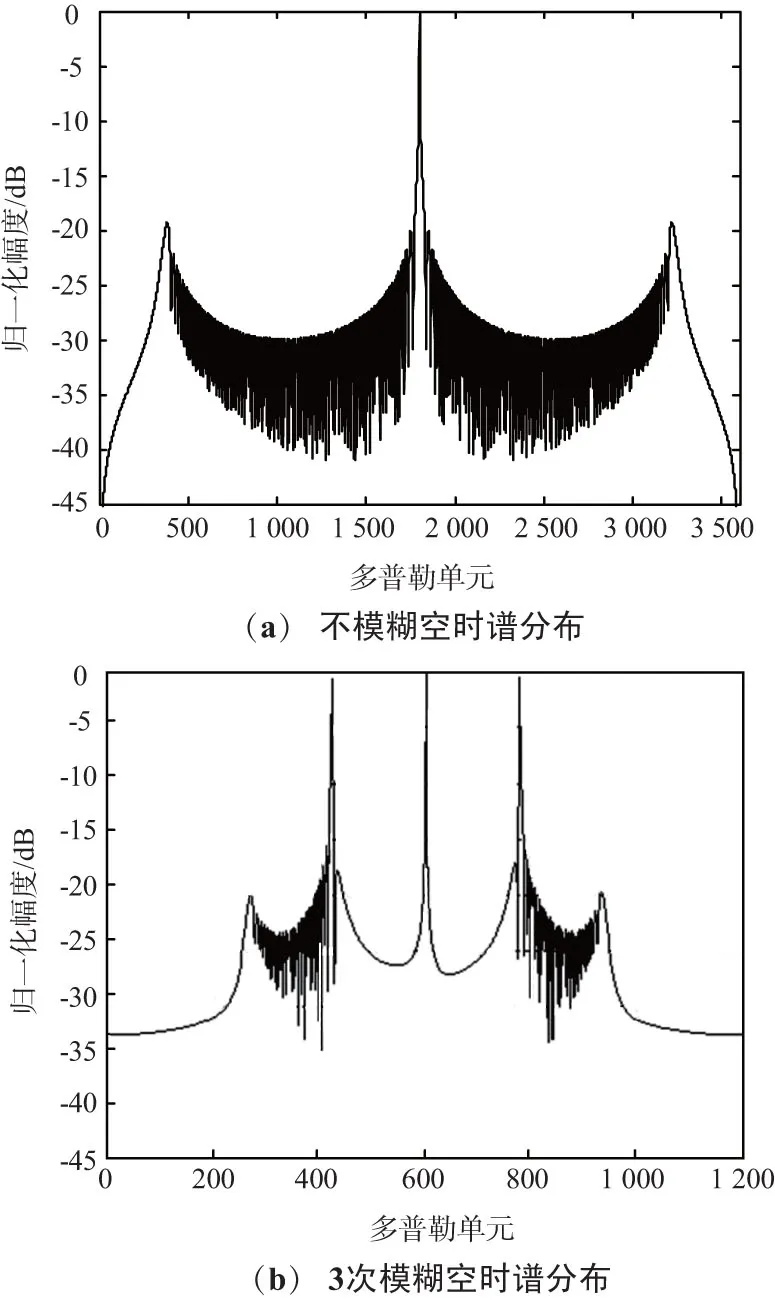
圖3 點目標仿真結(jié)果
基于以上分析,在滿足寬測繪帶的條件下,要想得到高分辨圖像就必須考慮多普勒模糊問題。若不采取一定抑制模糊措施,則存在多普勒模糊的SAR圖像將無法滿足工程應(yīng)用需求。然而在機載SAR系統(tǒng)實際飛行過程中,受運動氣流的干擾,載機的航跡、速度和高度等運行參數(shù)都將受到干擾。速度誤差對比如圖4所示,當載機速度發(fā)生變化時,其各次模糊分量空時譜分布軌跡發(fā)生變化。如果根據(jù)理想載機速度設(shè)計方位解模糊濾波器,其性能必將大幅度下降。因此,實際應(yīng)用中需要采取有效措施實時精確估計各次模糊分量多普勒頻率與空間角度之間的對應(yīng)關(guān)系,進而設(shè)計相應(yīng)的方位解模糊濾波器。
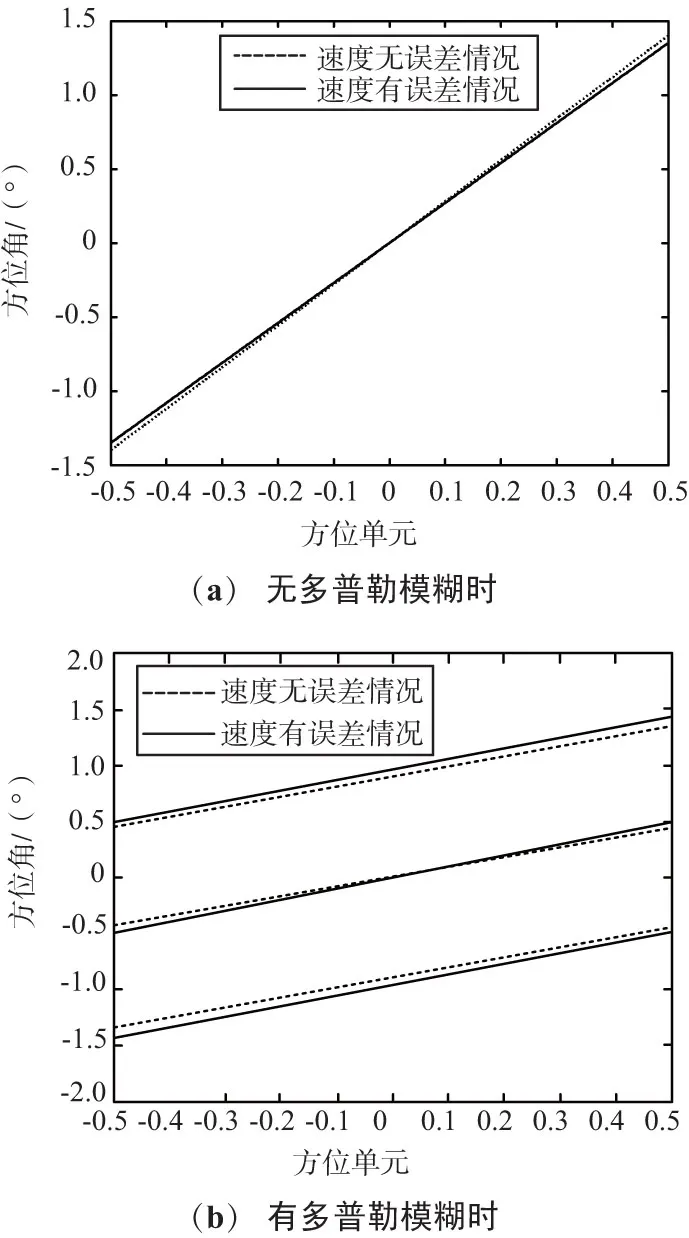
圖4 速度誤差度對比
2 長合成孔徑時間多普勒解模糊成像算法
針對長合成孔徑時間內(nèi),載機速度不穩(wěn)定導(dǎo)致的解模糊性能下降問題,采用如下處理算法:將數(shù)據(jù)分為若干個子孔徑,當子孔徑長度較短時,每個子孔徑內(nèi)載機速度可近似認為恒定,對每個子孔徑分別進行多普勒解模糊處理,并最終解模糊后的子孔徑數(shù)據(jù)進行拼接,實現(xiàn)最終成像。該方案的整體信號處理流程圖如圖5所示。
主要步驟如下:
① 對各個通道原始數(shù)據(jù)進行距離脈沖壓縮處理;
③ 對每個子孔徑數(shù)據(jù)做方位FFT處理,將數(shù)據(jù)變換至距離-多普勒域;
④ 在對各子孔徑距離-多普勒域數(shù)據(jù)進行通道間空域自適應(yīng)波束形成處理,實現(xiàn)多普勒解模糊,并將解模糊后的數(shù)據(jù)進行方位IFFT變換至慢時間域;
⑤ 將各自孔徑解模糊后的數(shù)據(jù)進行拼接,得到解模糊后的全孔徑數(shù)據(jù),進行成像處理,得到最終的SAR圖像。
子孔徑分割、解模糊、拼接的示意圖如圖6所示。

圖5 長合成孔徑時間算法流程
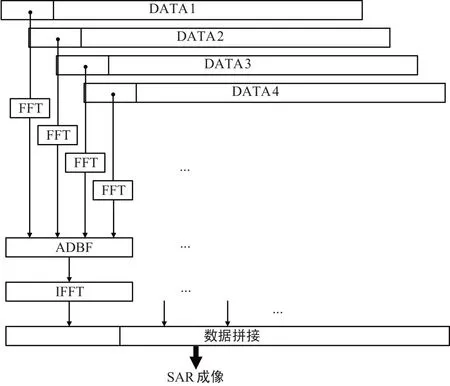
圖6 子孔徑處理示意
3 實測數(shù)據(jù)處理結(jié)果
為了驗證提出的長合成孔徑時間多通道SAR解模糊成像算法,將采用該算法對3組實測數(shù)據(jù)進行處理,3組數(shù)據(jù)均由某型Ku波段4通道機載SAR系統(tǒng)錄取。為了獲取多普勒模糊的數(shù)據(jù),對原始數(shù)據(jù)在慢時間域進行了3抽1(即多普勒發(fā)生3次模糊)處理。數(shù)據(jù)的部分系統(tǒng)參數(shù)如表1所示。
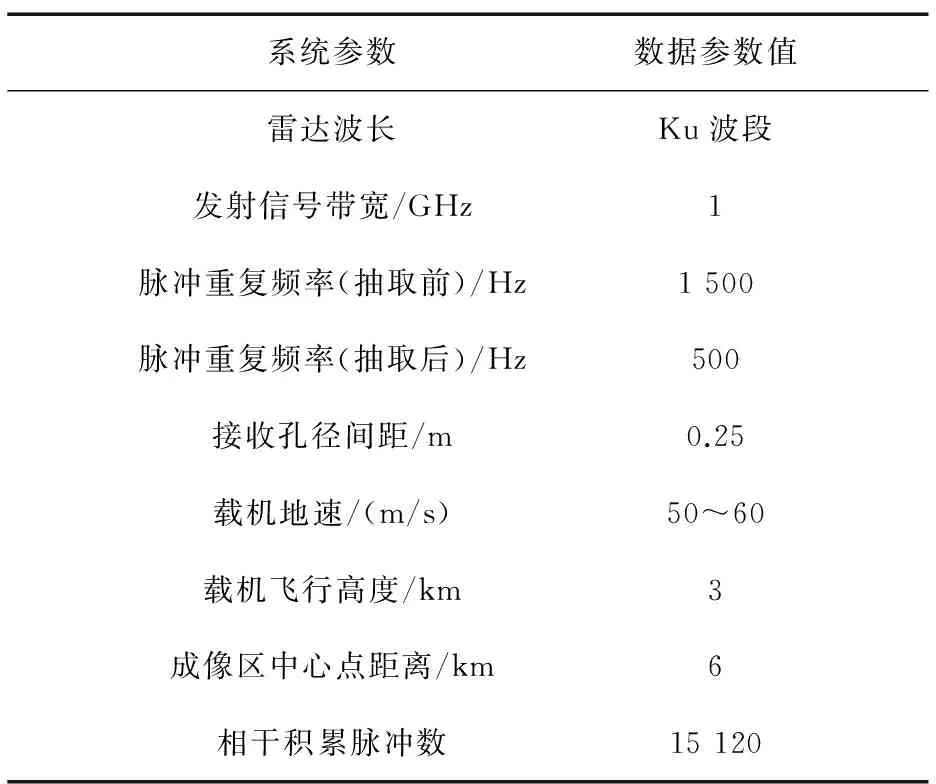
表1 四通道SAR實測數(shù)據(jù)系統(tǒng)參數(shù)
在處理中,將抽取后的全孔徑數(shù)據(jù)(5 040個脈沖)分割為30個子孔徑分別進行解模糊處理,再將解模糊后的數(shù)據(jù)進行拼接,獲取解模糊后的全孔徑數(shù)據(jù)(15 120個脈沖)并進行成像處理。
第1組數(shù)據(jù)處理中,某個子孔徑數(shù)據(jù)解模糊前后的距離—多普勒(RD)譜(橫向為方位,縱向為距離)如圖7所示。其中,左圖為不模糊數(shù)據(jù)的RD譜,中圖為參考通道模糊數(shù)據(jù)的RD譜,右圖為經(jīng)過解模糊處理后RD譜,比較3幅圖可以清楚看出,子孔徑數(shù)據(jù)解模糊處理的有效性。
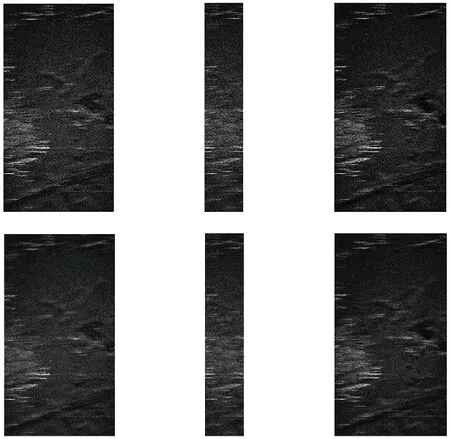
圖7 實測數(shù)據(jù)子孔徑解模糊前后RD譜對比
3組實測數(shù)據(jù)解模糊前后的成像結(jié)果(橫向為方位,縱向為距離)分別如圖8、圖9和圖10所示,其中,左圖為多普勒模糊數(shù)據(jù)直接成像結(jié)果,右圖為解模糊數(shù)據(jù)成像結(jié)果。
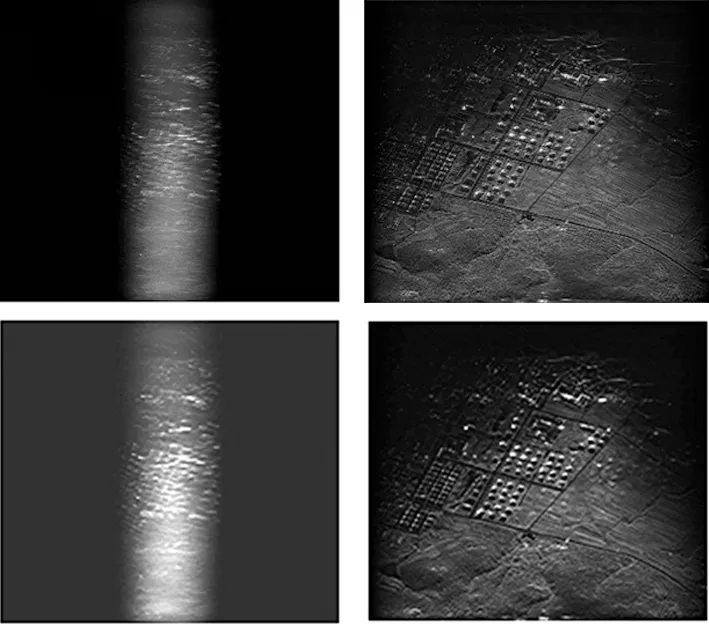
圖8 第1組實測數(shù)據(jù)解多普勒模糊成像結(jié)果
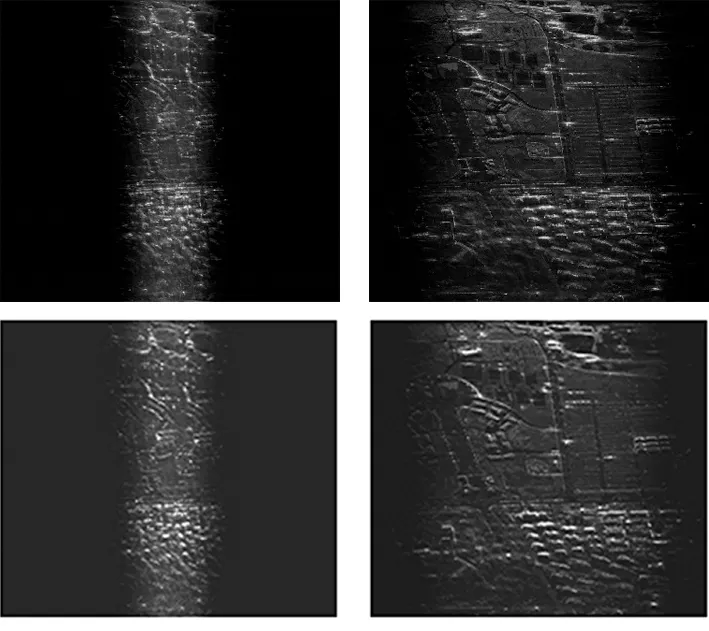
圖9 第2組實測數(shù)據(jù)解多普勒模糊成像結(jié)果

圖10 第3組實測數(shù)據(jù)解多普勒模糊成像結(jié)果
從圖8、圖9和圖10可以看出,經(jīng)過子孔徑解模糊處理后,全孔徑成像結(jié)果中已基本消除方位模糊現(xiàn)象,能夠在PRF不足的條件下獲取寬域高分辨率SAR圖像。
4 結(jié)束語
針對長合成孔徑條件下載機速度變化時的解模糊,研究了基于子孔徑處理的解多普勒模糊成像算法。該算法將數(shù)據(jù)分為若干個子孔徑,在每個子孔徑內(nèi)認為載機近似勻速運動,對每個子孔徑分別進行處理,最后再將數(shù)據(jù)合成。對四通道的數(shù)據(jù)處理結(jié)果表明該算法可以有效解決多普勒模糊問題,能到得到寬域高分辨SAR圖像。通過多組數(shù)據(jù)的處理,本算法可行,并且算法簡單,具有比較大的推廣性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
